
Recovering the Magnetic Image of Mars from Satellite Observations

 ,
,  , , and
, , and {kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
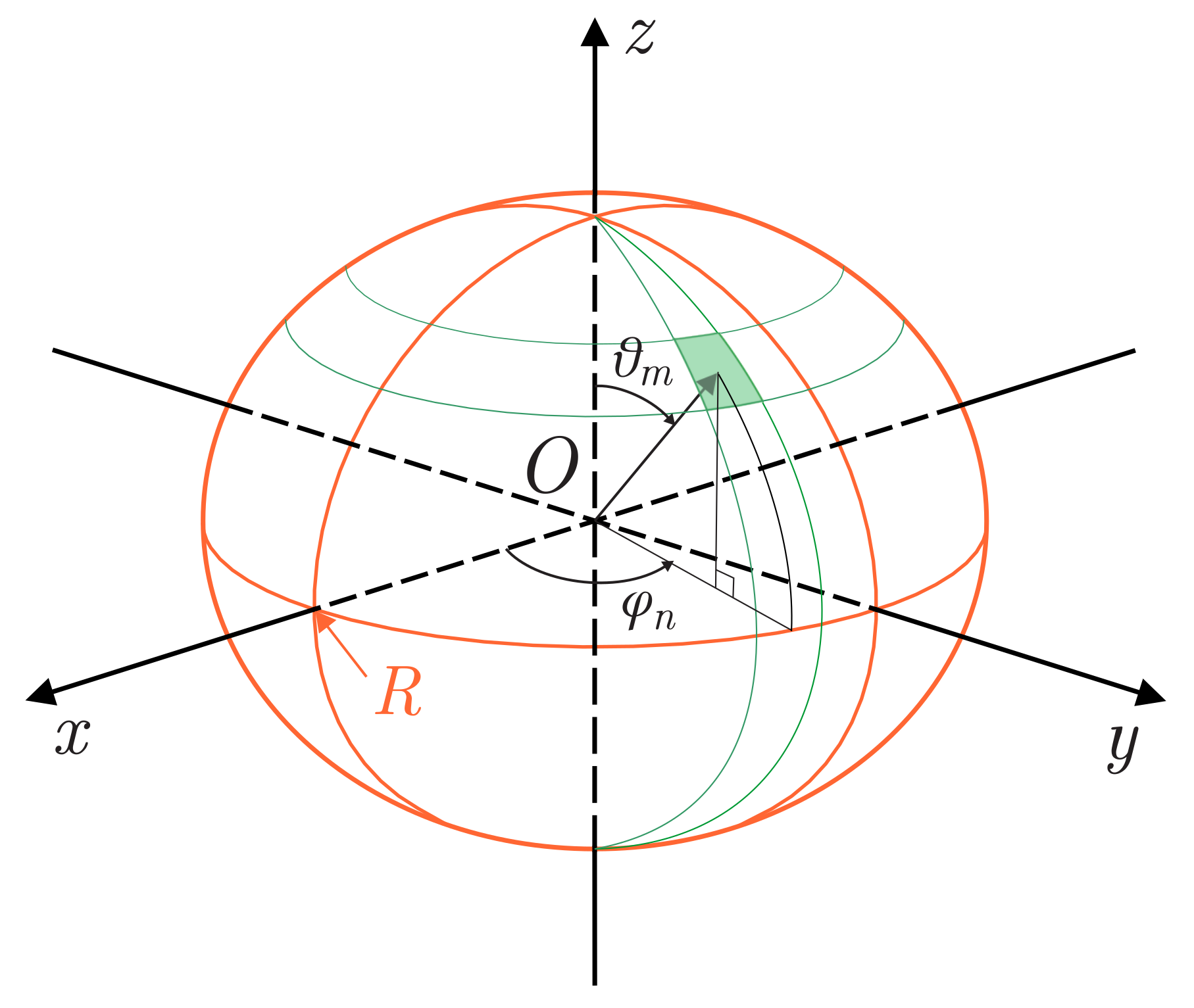
2. General Problem Statement
3. Reconstruction of the Equivalent Distribution of Magnetization Parameters in the Near-Surface Layer (Crust) of Mars
- 1.
- Matching condition along one of the meridians. This condition means that the magnetic image must be -periodic in the variable :These conditions give additional equations.
- 2.
- Matching condition at the South Pole. This means that all the grid values of the components of vector-function must match when :These conditions give additional equations.
- 3.
- Matching condition at the North Pole.These conditions give additional equations.
3.1. Using a Regularizing Algorithm
3.2. Using the Conjugate Gradient Method
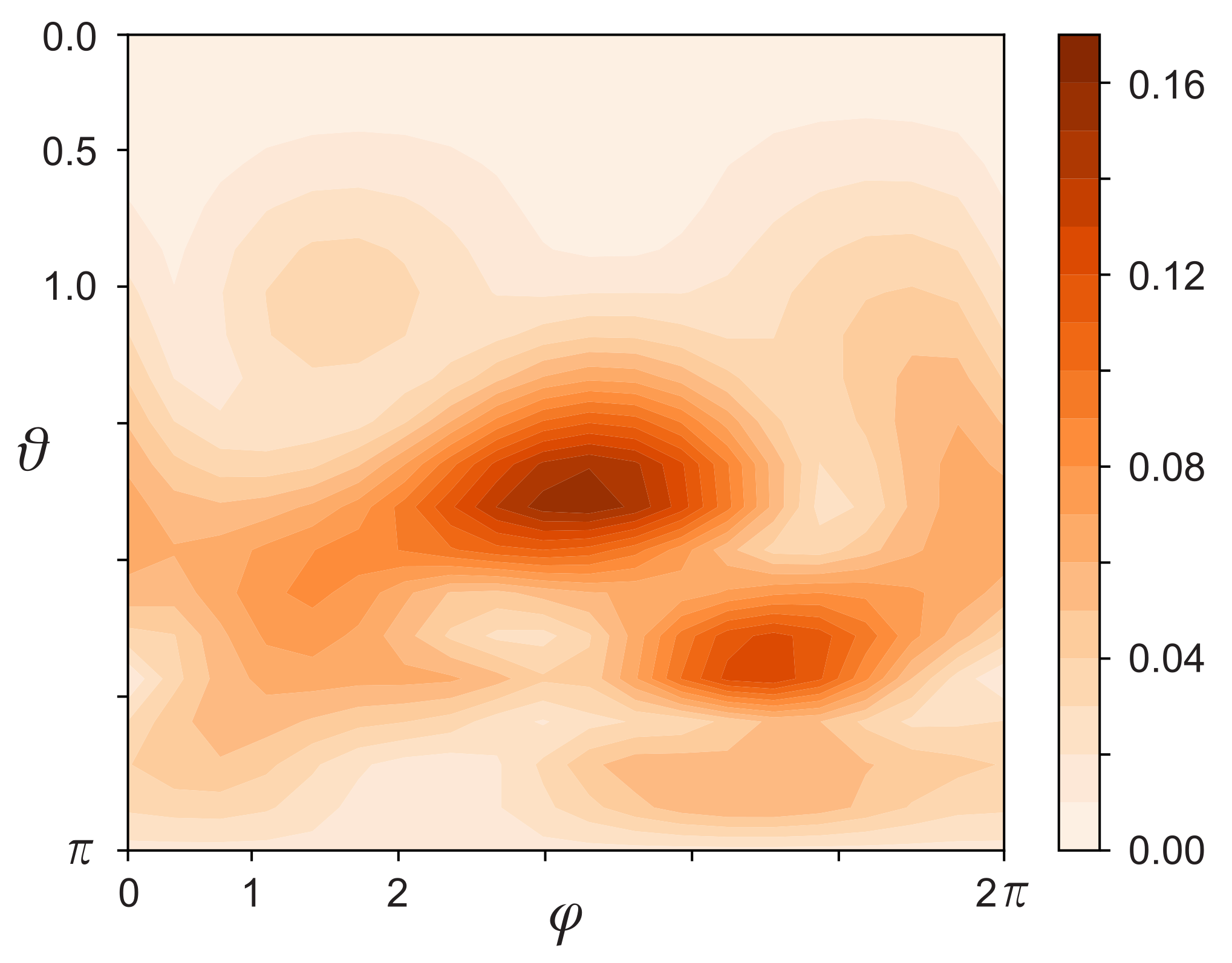
3.3. Experimental Data Processing Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Riedler, W.; Mohlmann, D.; Oraevsky, V.; Schwingenschuh, K.; Yeroshenko, Y.; Rustenbach, J.; Aydogar, O.; Berghofer, G.; Lichtenegger, H.; Delva, M. Magnetic fields near Mars: First results. Nature 1989, 341, 604–607. [Google Scholar] [CrossRef]
- Connerney, J. Planetary Magnetism. Treatise Geophys. 2015, 10, 195–237. [Google Scholar]
- Portniaguine, O.; Zhdanov, M. Focusing geophysical inversion images. Geophysics 1999, 64, 874–887. [Google Scholar] [CrossRef] [Green Version]
- Portniaguine, O.; Zhdanov, M. 3-D magnetic inversion with data compression and image focusing. Geophysics 2002, 67, 1532–1541. [Google Scholar] [CrossRef] [Green Version]
- Acuna, M.; Connerney, J.; Wasilewski, P.; Lin, R.; Anderson, K.; Carlson, C.; McFadden, J.; Curtis, D.; Mitchell, D.; Reme, H.; et al. Magnetic field and plasma observations at Mars: Initial results of the Mars Global Surveyor Mission. Science 1998, 279, 1676–1680. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Connerney, J.; Acuna, M.; Ness, N.; Kletetschka, G.; Mitchell, D.; Lin, R.; Reme, H. Tectonic implications of Mars crustal magnetism. Proc. Natl. Acad. Sci. USA 2005, 102, 14970–14975. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Connerney, J.; Acuna, M.; Wasilewski, P.; Ness, N.; Reme, H.; Mazelle, C.; Vignes, D.; Lin, R.; Mitchell, D.; Cloutier, P. Magnetic lineations in the ancient crust of Mars. Science 1999, 284, 794–798. [Google Scholar] [CrossRef] [Green Version]
- Sprenke, K.; Baker, L. Magnetization, paleomagnetic poles, and polar wander on Mars. Icarus 2000, 147, 26–34. [Google Scholar] [CrossRef]
- Jurdy, D.; Stefanick, M. Vertical extrapolation of Mars magnetic potentials. J. Geophys. Res. 2004, 109, E10005. [Google Scholar] [CrossRef]
- Arkani-Hamed, J. An improved 50-degree spherical harmonic model of the magnetic field of Mars derived from both high-altitude and low-altitude data. J. Geophys. Res. 2002, 107, 13-1–13-8. [Google Scholar] [CrossRef] [Green Version]
- Cain, J.; Ferguson, B.; Mozzoni, D. An n = 90 internal potential function of the Martian crustal magnetic field. J. Geophys. Res. 2003, 108, 5008. [Google Scholar]
- Purucker, M.; Ravat, D.; Frey, H.; Sabaka, T.; Acuna, M. An altitude-normalized magnetic map of Mars and its interpretation. Geophys. Res. Lett. 2000, 27, 2449–2452. [Google Scholar] [CrossRef]
- Langlais, B.; Purucker, M.; Mandea, M. Crustal magnetic field of Mars. J. Geophys. Res. Planets 2004, 109, E02008. [Google Scholar] [CrossRef]
- Mittelholz, A.; Johnson, C.; Morschhauser, A. A new magnetic field activity proxy for Mars from MAVEN data. Geophys. Res. Lett. 2018, 45, 5899–5907. [Google Scholar] [CrossRef] [Green Version]
- Langlais, B.; Thébault, E.; Houliez, A.; Purucker, M. A new model of the crustal magnetic field of Mars using MGS and MAVEN. J. Geophys. Res. Planets 2019, 124, 1542–1569. [Google Scholar] [CrossRef] [Green Version]
- Acuna, M.; Connerney, J.; Ness, N.; Lin, R.; Mitchell, D.; Carlson, C.; McFadden, J.; Anderson, K.; Reme, H.; Mazelle, C.; et al. Global distribution of crustal magnetism discovered by the Mars Global SurveyorMAG/ER Experiment. Science 1999, 284, 790–793. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- MARS MAVEN Mission: Magnetometer (MAG) Instrument. Available online: https://pds-ppi.igpp.ucla.edu/search/?sc=MAVEN&i=MAG (accessed on 8 November 2021).
- MARS MAVEN Mission. Available online: https://mars.nasa.gov/maven/ (accessed on 8 November 2021).
- Zidarov, D. On the Solution of Some Inverse Problems in the Scope of Potential Fields and Its Application in Geophysics; BAN: Sofia, Bulgaria, 1968. [Google Scholar]
- Gudkova, T.; Stepanova, I.; Batov, A.; Shchepetilov, A. Modified method S- and R-approximations in solving the problems of Mars’s morphology. Inverse Probl. Sci. Eng. 2021, 29, 790–804. [Google Scholar] [CrossRef]
- Gudkova, T.; Stepanova, I.; Batov, A. Density anomalies in subsurface layers of mars: Model estimates for the site of the InSight mission seismometer. Sol. Syst. Res. Vol. 2020, 54, 15–19. [Google Scholar] [CrossRef]
- Salnikov, A.; Stepanova, I.; Gudkova, T.; Batov, A. Analytical modeling of the magnetic field of Mars from satellite data using modified S-approximations. Dokl. Earth Sci. 2021, 499, 575–579. [Google Scholar] [CrossRef]
- Backus, G.; Gilbert, F. Numerical application of formalism for geophysical inverse problems. Geophys. J. Int. 1967, 13, 247–276. [Google Scholar] [CrossRef] [Green Version]
- Backus, G.; Gilbert, F. The resolving power of gross Earth data. Geophys. J. Int. 1968, 16, 169–205. [Google Scholar] [CrossRef] [Green Version]
- Strakhov, V.; Stepanova, I. The S-approximation method and its application to gravity problems. Izv. Phys. Solid Earth 2002, 16, 91–107. [Google Scholar]
- Strakhov, V.; Stepanova, I. Solution of gravity problems by the S-approximation method (Regional Version). Izv. Phys. Solid Earth 2002, 16, 535–544. [Google Scholar]
- Stepanova, I. On the S-approximation of the Earth’s gravity field. Inverse Probl. Sci. Eng. 2008, 16, 535–544. [Google Scholar] [CrossRef]
- Stepanova, I. On the S-approximation of the Earth’s gravity field. Regional version. Inverse Probl. Sci. Eng. 2009, 16, 1095–1111. [Google Scholar] [CrossRef]
- Stepanova, I.; Kerimov, I.; Raevskiy, D.; Shchepetilov, A. Improving the methods for processing large data in geophysics and geomorphology based on the modified S- and F-approximations. Izv. Phys. Solid Earth 2020, 16, 1095–1111. [Google Scholar] [CrossRef]
- Stepanova, I.; Raevsky, D. On the solution of inverse problems of gravimetry. Izv. Phys. Solid Earth 2015, 51, 207–218. [Google Scholar]
- Wang, Y.; Lukyanenko, D.; Yagola, A. Magnetic parameters inversion method with full tensor gradient data. Inverse Probl. Imaging 2019, 13, 745–754. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Kolotov, I.; Lukyanenko, D.; Yagola, A. Reconstruction of magnetic susceptibility using full magnetic gradient data. Comput. Math. Math. Phys. 2020, 60, 1000–1007. [Google Scholar] [CrossRef]
- Wang, Y.; Leonov, A.; Lukyanenko, D.; Yagola, A. General Tikhonov regularization with applications in geoscience. CSIAM Trans. Appl. Math. 2020, 1, 53–85. [Google Scholar] [CrossRef]
- Zhdanov, M. Integral Transforms in Geophysics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Tikhonov, A.; Goncharsky, A.; Stepanov, V.; Yagola, A. Numerical Methods for the Solution of Ill-Posed Problems; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1995. [Google Scholar]
- Alifanov, O.; Artuhin, E.; Rumyantsev, S. Extreme Methods for the Solution of Ill-Posed Problems; Nauka: Moscow, Russia, 1988. [Google Scholar]
- Lukyanenko, D.; Yagola, A.; Evdokimova, N. Application of inversion methods in solving ill-posed problems for magnetic parameter identification of steel hull vessel. J. Inverse Ill-Posed Probl. 2011, 18, 1013–1029. [Google Scholar] [CrossRef]
- Lukyanenko, D.; Yagola, A. Some methods for solving of 3d inverse problem of magnetometry. Eurasian J. Math. Comput. Appl. 2016, 4, 4–14. [Google Scholar] [CrossRef]
- Voevodin, V.; Antonov, A.; Nikitenko, D.; Shvets, P.; Sobolev, S.; Sidorov, I.; Stefanov, K.; Voevodin, V.; Zhumatiy, S. Supercomputer Lomonosov-2: Large Scale, Deep Monitoring and Fine Analytics for the User Community. Supercomput. Front. Innov. 2019, 6, 4–11. [Google Scholar]
- Schmidt, P.; Clark, D. Advantages of measuring the magnetic gradient tensor. Preview 2000, 85, 26–30. [Google Scholar]
- Schmidt, P.; Clark, D.; Leslie, K.; Bick, M.; Tilbrook, D. GETMAG-a SQUID magnetic tensor gradiometer for mineral and oil exploration. Explor. Geophys. 2004, 35, 297–305. [Google Scholar] [CrossRef]
- Heath, P.; Heinson, G.; Greenhalgh, S. Some comments on potential field tensor data. Explor. Geophys. 2003, 34, 57–62. [Google Scholar] [CrossRef]
- Schiffler, M.; Queitsch, M.; Stolz, R.; Chwala, A.; Krech, W.; Meyer, H.G.; Kukowski, N. Calibration of SQUID vector magnetometers in full tensor gradiometry systems. Geophys. J. Int. 2014, 198, 954–964. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Rong, L.; Qiu, L.; Lukyanenko, D.; Yagola, A. Magnetic susceptibility inversion method with full tensor gradient data using low temperature SQUIDs. Pet. Sci. 2019, 16, 794–807. [Google Scholar] [CrossRef] [Green Version]
- Panning, M.P.; Lognonné, P.; Banerdt, W.B.; Garcia, R.; Golombek, M.; Kedar, S.; Knapmeyer-Endrun, B.; Mocquet, A.; Teanby, N.A.; Tromp, J.; et al. Planned products of the Mars structure service for the InSight mission to Mars. Space Sci. Rev. 2017, 211, 611–650. [Google Scholar] [CrossRef]
- Golombek, M.; Grott, M.; Kargl, G.; Andrade, J.; Marshall, J.; Warner, N.; Teanby, N.A.; Ansan, V.; Hauber, E.; Voigt, J.; et al. Geology and physical properties investigations by the InSight lander. Space Sci. Rev. 2018, 214, 1–52. [Google Scholar] [CrossRef] [Green Version]
- Lognonné, P.; Banerdt, W.B.; Giardini, D.; Pike, W.T.; Christensen, U.; Laudet, P.; De Raucourt, S.; Zweifel, P.; Calcutt, S.; Bierwirth, M.; et al. SEIS: InSight’s seismic qxperiment for internal structure of Mars. Space Sci. Rev. 2019, 215, 12. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zharkov, V.; Gudkova, T. On the model structure of the gravity field of Mars. Sol. Syst. Res. Vol. 2016, 50, 235–250. [Google Scholar] [CrossRef]
- Smith, D.E.; Zuber, M.T.; Frey, H.V.; Garvin, J.B.; Head, J.W.; Muhleman, D.O.; Pettengill, G.H.; Phillips, R.J.; Solomon, S.C.; Zwally, H.J.; et al. Mars orbiter laser altimeter: Experiment summary after the first year of global mapping of Mars. J. Geophys. Res. Planets 2001, 106, 23689–23722. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kolotov, I.; Lukyanenko, D.; Stepanova, I.; Wang, Y.; Yagola, A. Recovering the Magnetic Image of Mars from Satellite Observations. J. Imaging 2021, 7, 234. https://doi.org/10.3390/jimaging7110234
Kolotov I, Lukyanenko D, Stepanova I, Wang Y, Yagola A. Recovering the Magnetic Image of Mars from Satellite Observations. Journal of Imaging. 2021; 7(11):234. https://doi.org/10.3390/jimaging7110234
Chicago/Turabian StyleKolotov, Igor, Dmitry Lukyanenko, Inna Stepanova, Yanfei Wang, and Anatoly Yagola. 2021. "Recovering the Magnetic Image of Mars from Satellite Observations" Journal of Imaging 7, no. 11: 234. https://doi.org/10.3390/jimaging7110234
APA StyleKolotov, I., Lukyanenko, D., Stepanova, I., Wang, Y., & Yagola, A. (2021). Recovering the Magnetic Image of Mars from Satellite Observations. Journal of Imaging, 7(11), 234. https://doi.org/10.3390/jimaging7110234