
A Review of Modern Thermal Imaging Sensor Technology and Applications for Autonomous Aerial Navigation



Abstract
:1. Introduction
2. Navigation Problems with Thermal Sensors
2.1. Aims and Search Methodology
2.2. Structure of the Paper
3. Thermal Sensor System Considerations for Navigation Applications
3.1. Cooled and Uncooled Sensor
3.2. Sensor Specification Constraints for Unmanned Platforms
3.3. Platform Considerations
4. Physics of Thermal Sensors
4.1. Black Body Radiation
- is the spectral radiance of the object at temperature T(K) and frequency ;
- ℏ is the Planck constant;
- c is the speed of light in vacuum;
- k is Boltzmann’s constant;
- is the frequency of the electromagnetic radiation;
- T is the absolute temperature of the object.
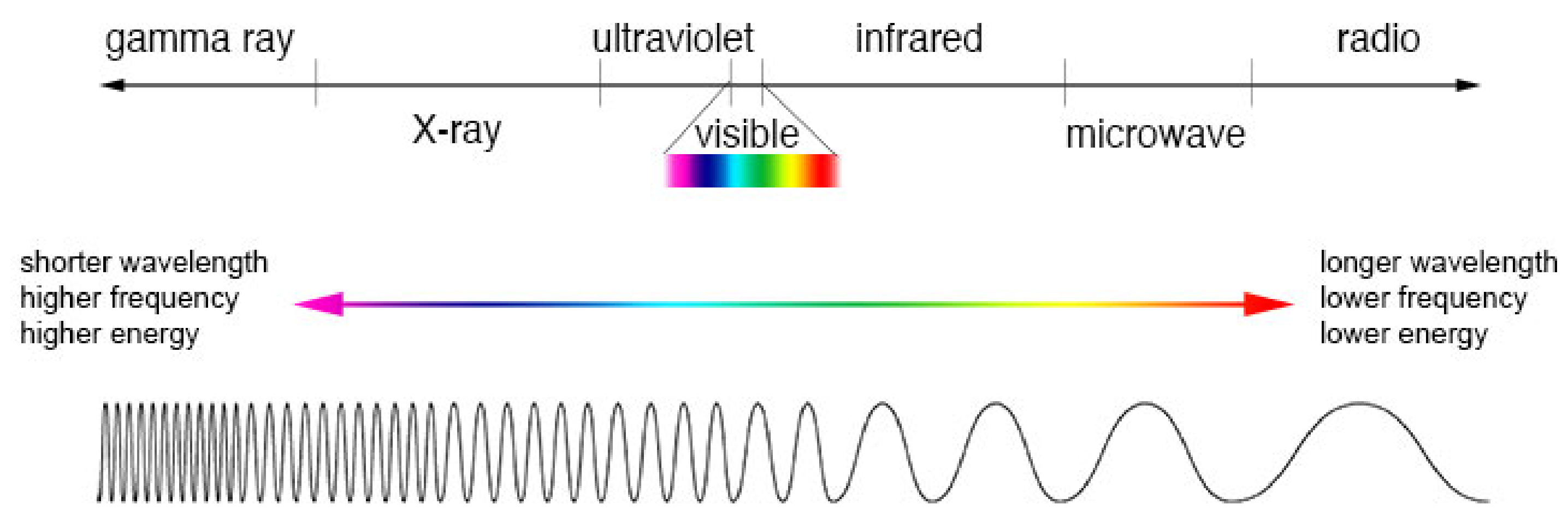
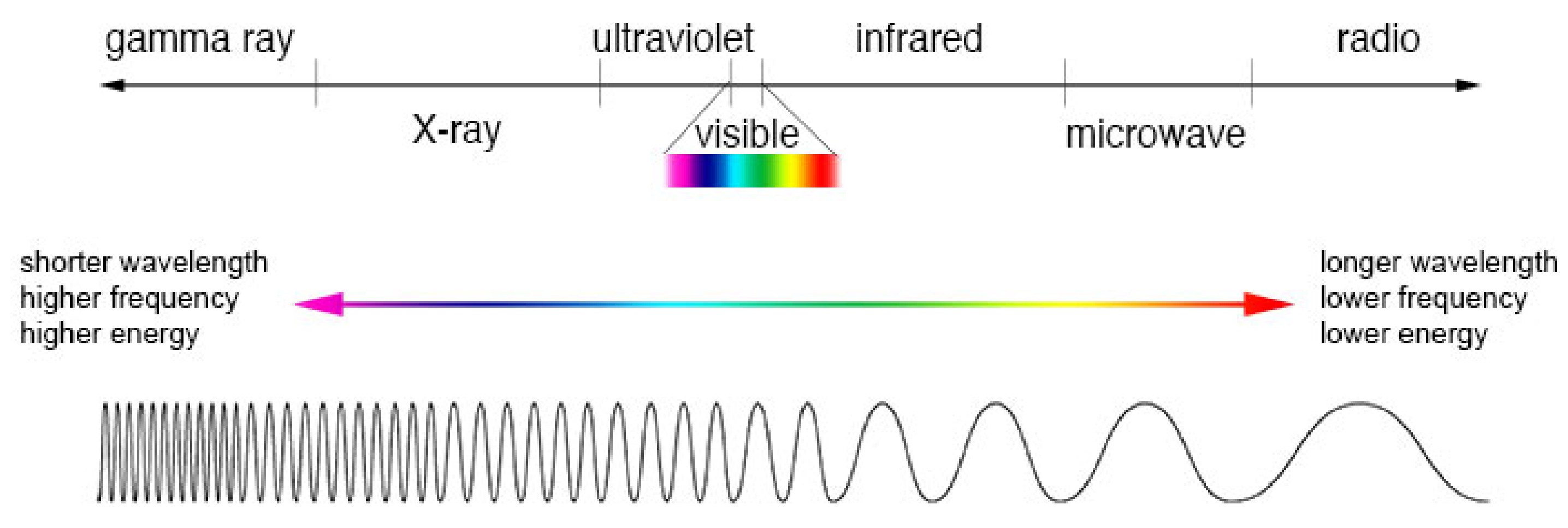
4.2. Electromagnetic Spectrum
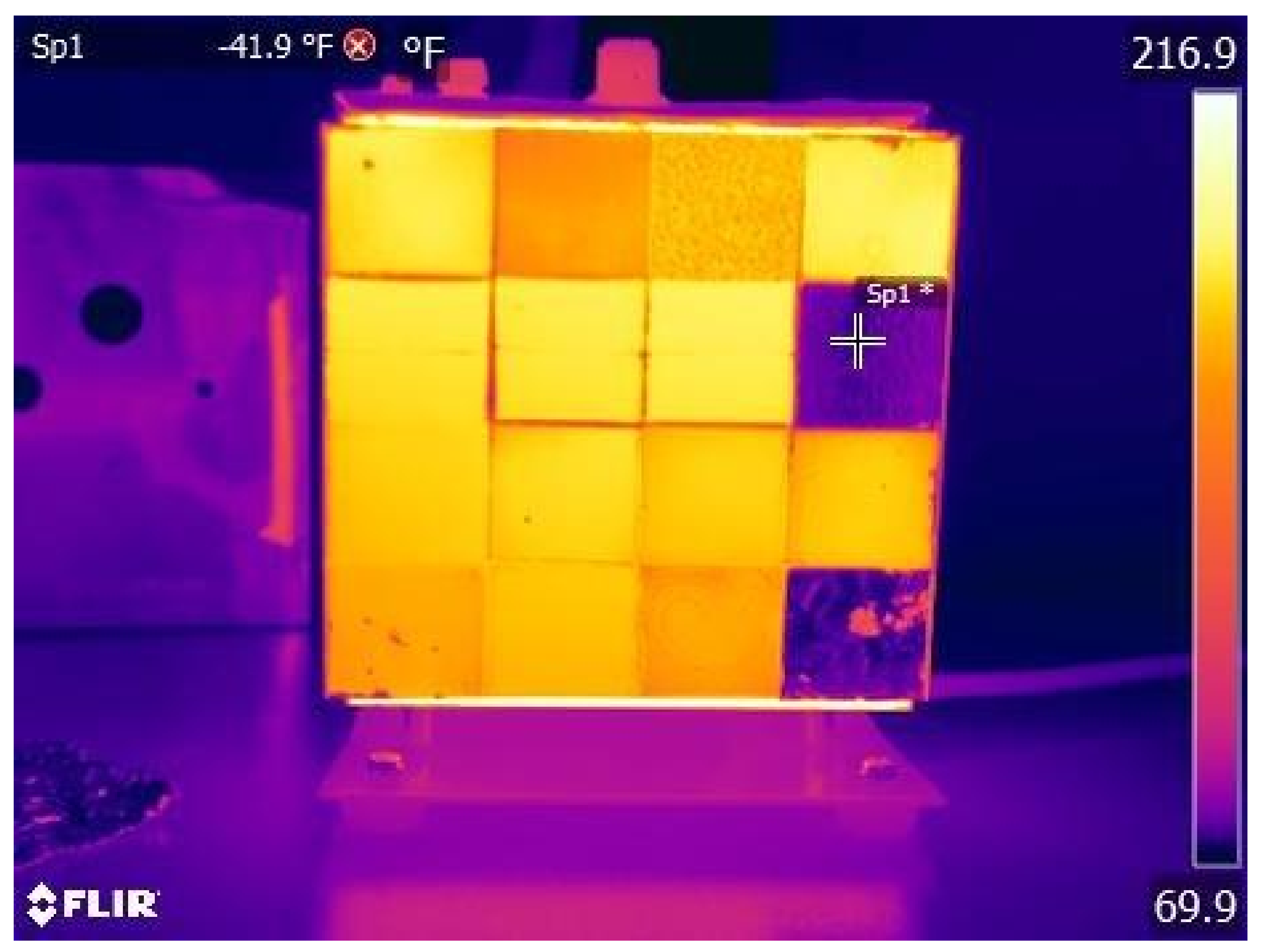
4.3. Emissivity
5. Thermal Sensor Configurations
5.1. Sensor Calibration
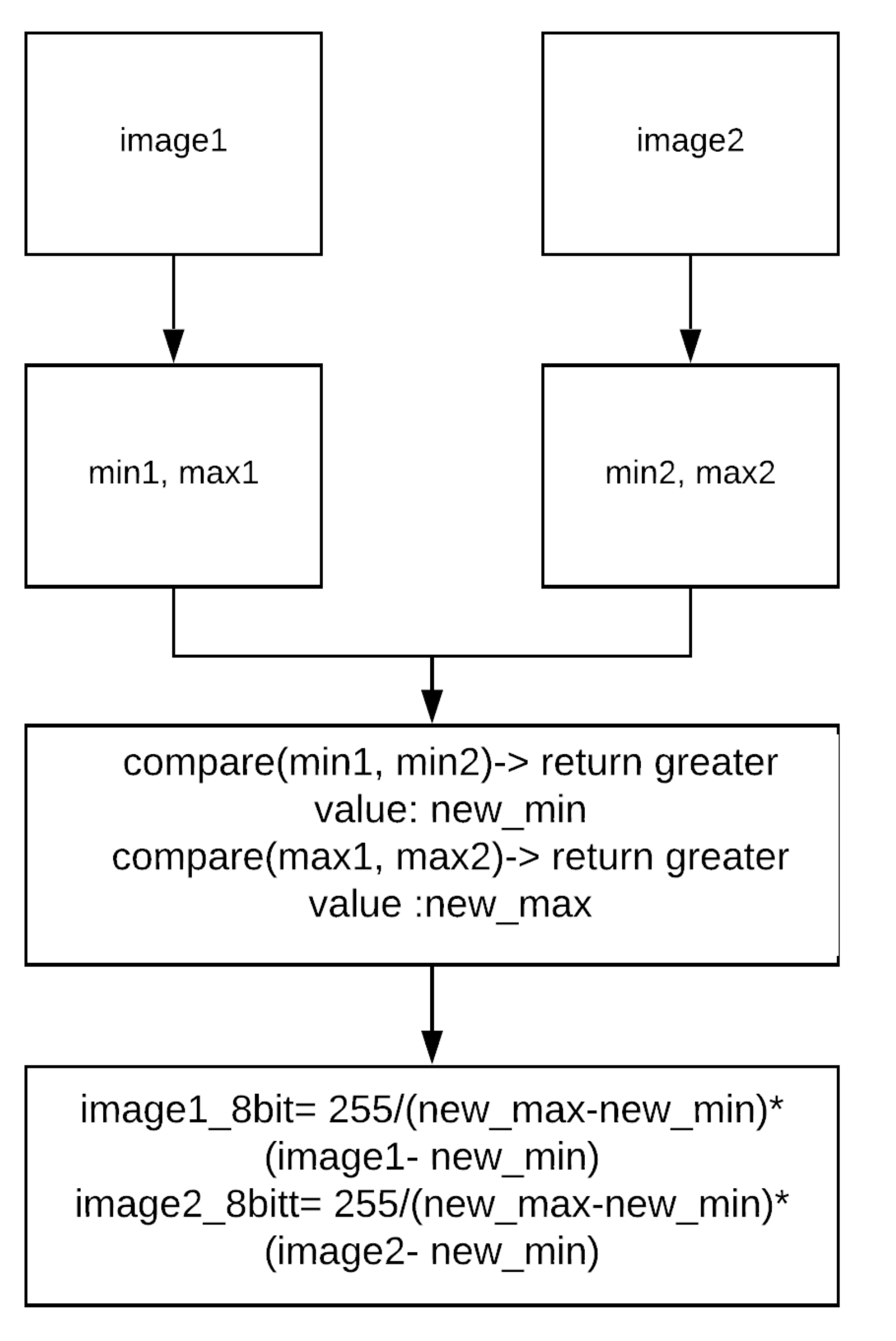
5.2. Re-Scaling and Correction Techniques
5.2.1. Automatic Gain Control
5.3. Flat Field and Non-Uniformity Corrections
6. Vision-Based Navigation Systems
6.1. Map Based Systems
6.2. Map-Building Systems
6.3. Mapless Systems
7. Simultaneous Localisation and Mapping
7.1. Combined Spectrum Techniques
7.2. Thermal Spectrum Techniques
7.2.1. Re-Scaled Data
7.2.2. Full Radiometric Data
8. Optical Flow
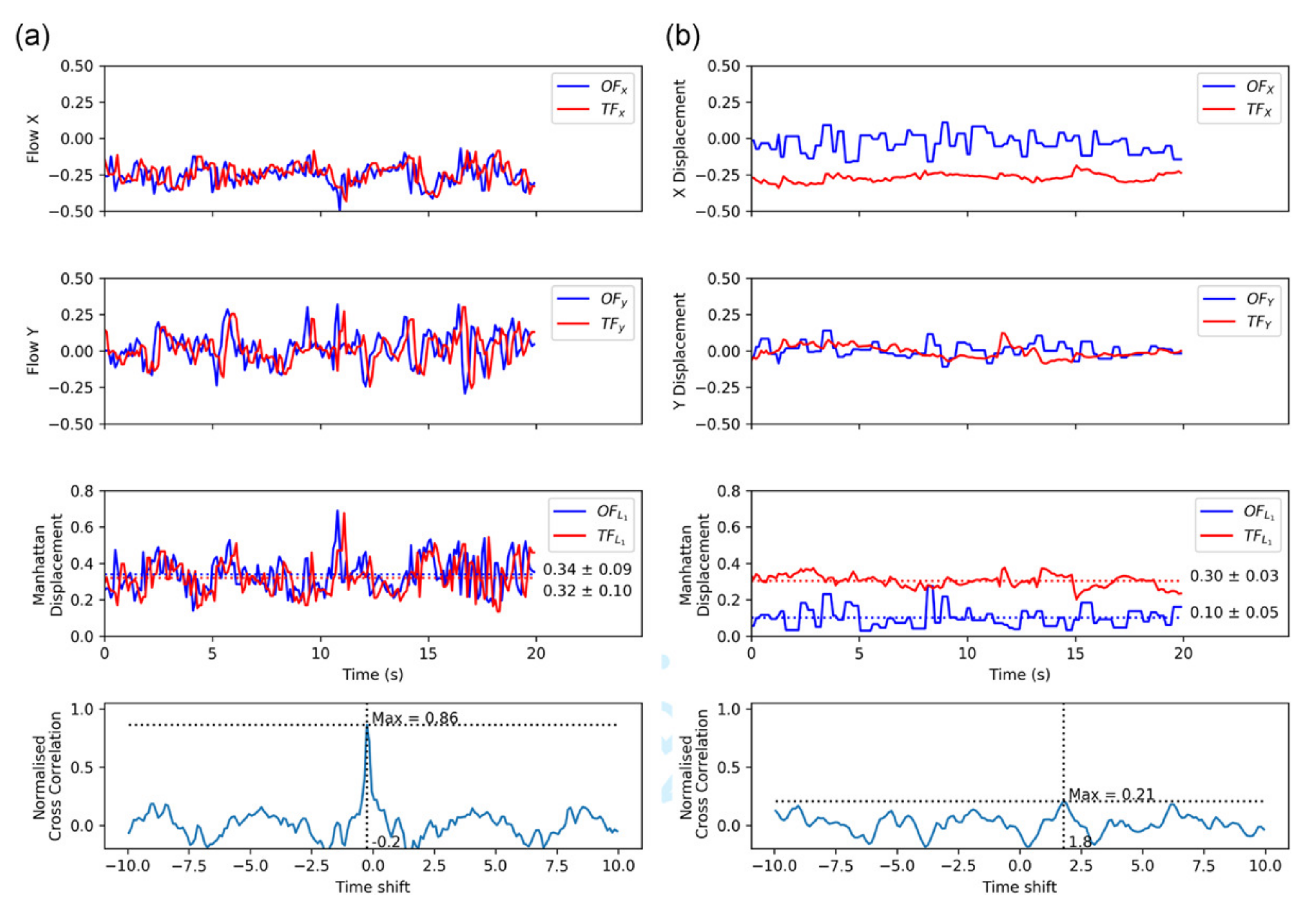
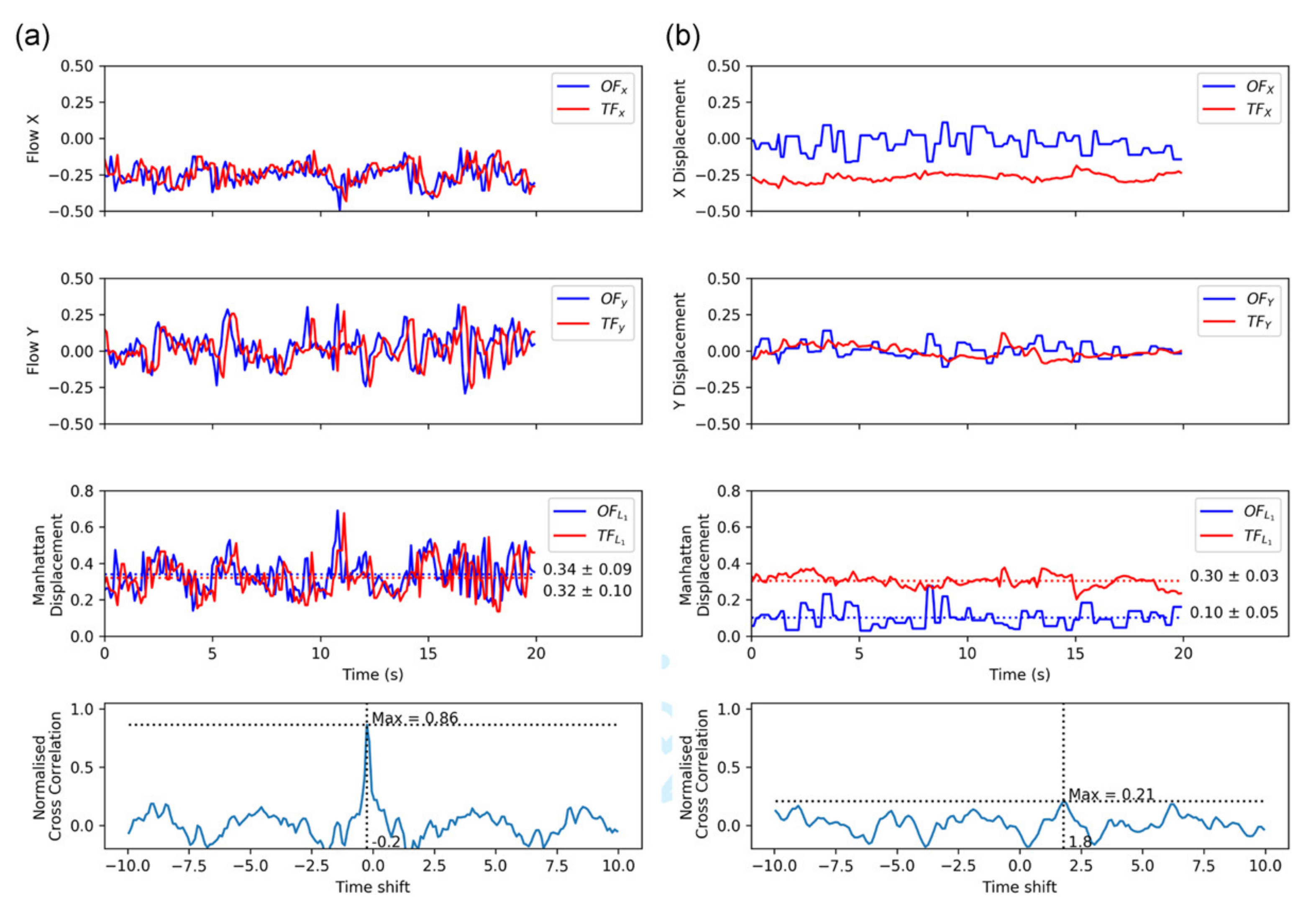
8.1. Thermal Flow
9. Deep Learning
9.1. Thermal Image Enhancement
9.2. Deep Learning Neural Network Based Odometry
10. Roles of Thermal Sensors in Navigation Systems and Applications
11. Navigation Approaches with Respect to System Configuration
11.1. VSLAM
11.2. Odometry
11.3. Other Applications
12. Discussion
13. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| LWIR | Long Wavelength Infrared; |
| AGC | Automatic Gain Control; |
| NUC | Non-Uniformity Correction; |
| UAV | Unmanned Aerial Vehicle; |
| UGV | Unmanned Ground Vehicle; |
| SLAM | Simultaneous Localisation and Mapping; |
| TF | Thermal Flow; |
| OF | Optical Flow; |
| LK | Lucas Kanade. |
References
- Keane, J.F.; Carr, S.S. A brief history of early unmanned aircraft. Johns Hopkins APL Tech. Dig. 2013, 32, 558–571. [Google Scholar]
- Nikolic, J.; Burri, M.; Rehder, J.; Leutenegger, S.; Huerzeler, C.; Siegwart, R. A UAV system for inspection of industrial facilities. In Proceedings of the 2013 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2013; pp. 1–8. [Google Scholar]
- Omari, S.; Gohl, P.; Burri, M.; Achtelik, M.; Siegwart, R. Visual industrial inspection using aerial robots. In Proceedings of the IEEE 2014 3rd International Conference on Applied Robotics for the Power Industry, Foz do Iguassu, Brazil, 14–16 October 2014; pp. 1–5. [Google Scholar]
- Hodgson, J.C.; Baylis, S.M.; Mott, R.; Herrod, A.; Clarke, R.H. Precision wildlife monitoring using unmanned aerial vehicles. Sci. Rep. 2016, 6, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez, L.F.; Montes, G.A.; Puig, E.; Johnson, S.; Mengersen, K.; Gaston, K.J. Unmanned aerial vehicles (UAVs) and artificial intelligence revolutionizing wildlife monitoring and conservation. Sensors 2016, 16, 97. [Google Scholar] [CrossRef] [Green Version]
- Scherer, J.; Yahyanejad, S.; Hayat, S.; Yanmaz, E.; Andre, T.; Khan, A.; Vukadinovic, V.; Bettstetter, C.; Hellwagner, H.; Rinner, B. An autonomous multi-UAV system for search and rescue. In Proceedings of the First Workshop on Micro Aerial Vehicle Networks, Systems, and Applications for Civilian Use, Florence, Italy, 18 May 2015; pp. 33–38. [Google Scholar]
- Al-Naji, A.; Gibson, K.; Lee, S.H.; Chahl, J. Monitoring of cardiorespiratory signal: Principles of remote measurements and review of methods. IEEE Access 2017, 5, 15776–15790. [Google Scholar] [CrossRef]
- Perera, A.G.; Law, Y.W.; Chahl, J. Drone-action: An outdoor recorded drone video dataset for action recognition. Drones 2019, 3, 82. [Google Scholar] [CrossRef] [Green Version]
- Al-Naji, A.; Perera, A.G.; Mohammed, S.L.; Chahl, J. Life signs detector using a drone in disaster zones. Remote Sens. 2019, 11, 2441. [Google Scholar] [CrossRef] [Green Version]
- Al-Naji, A.; Perera, A.G.; Chahl, J. Remote monitoring of cardiorespiratory signals from a hovering unmanned aerial vehicle. Biomed. Eng. Online 2017, 16, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Molina, P.; Colomina, I.; Victoria, T.; Skaloud, J.; Kornus, W.; Prades, R.; Aguilera, C. Searching lost people with UAVs: The system and results of the close-search project. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 441–446. [Google Scholar] [CrossRef] [Green Version]
- Bein, D.; Bein, W.; Karki, A.; Madan, B.B. Optimizing border patrol operations using unmanned aerial vehicles. In Proceedings of the IEEE 2015 12th International Conference on Information Technology-New Generations, Las Vegas, NV, USA, 13–15 April 2015; pp. 479–484. [Google Scholar]
- Lu, Y.; Xue, Z.; Xia, G.S.; Zhang, L. A survey on vision-based UAV navigation. Geo-Spat. Inf. Sci. 2018, 21, 21–32. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Z.; Groves, P.D. NLOS GPS signal detection using a dual-polarisation antenna. GPS Solut. 2014, 18, 15–26. [Google Scholar] [CrossRef] [Green Version]
- Van Nee, R.D. Multipath effects on GPS code phase measurements. Navigation 1992, 39, 177–190. [Google Scholar] [CrossRef]
- Zefri, Y.; ElKettani, A.; Sebari, I.; Ait Lamallam, S. Thermal infrared and visual inspection of photovoltaic installations by UAV photogrammetry—Application case: Morocco. Drones 2018, 2, 41. [Google Scholar] [CrossRef] [Green Version]
- Quater, P.B.; Grimaccia, F.; Leva, S.; Mussetta, M.; Aghaei, M. Light Unmanned Aerial Vehicles (UAVs) for cooperative inspection of PV plants. IEEE J. Photovoltaics 2014, 4, 1107–1113. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Jung, J.; Sohn, G.; Cohen, M. Thermal infrared inspection of roof insulation using unmanned aerial vehicles. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 381. [Google Scholar] [CrossRef] [Green Version]
- Luque-Vega, L.F.; Castillo-Toledo, B.; Loukianov, A.; Gonzalez-Jimenez, L.E. Power line inspection via an unmanned aerial system based on the quadrotor helicopter. In Proceedings of the IEEE MELECON 2014—2014 17th IEEE Mediterranean Electrotechnical Conference, Beirut, Lebanon, 13–16 April 2014; pp. 393–397. [Google Scholar]
- Martinez-De Dios, J.; Ollero, A. Automatic detection of windows thermal heat losses in buildings using UAVs. In Proceedings of the IEEE 2006 World Automation Congress, Budapest, Hungary, 24–26 July 2006; pp. 1–6. [Google Scholar]
- Rud, R.; Cohen, Y.; Alchanatis, V.; Levi, A.; Brikman, R.; Shenderey, C.; Heuer, B.; Markovitch, T.; Dar, Z.; Rosen, C.; et al. Crop water stress index derived from multi-year ground and aerial thermal images as an indicator of potato water status. Precis. Agric. 2014, 15, 273–289. [Google Scholar] [CrossRef]
- Möller, M.; Alchanatis, V.; Cohen, Y.; Meron, M.; Tsipris, J.; Naor, A.; Ostrovsky, V.; Sprintsin, M.; Cohen, S. Use of thermal and visible imagery for estimating crop water status of irrigated grapevine. J. Exp. Bot. 2007, 58, 827–838. [Google Scholar] [CrossRef] [Green Version]
- DeJonge, K.C.; Taghvaeian, S.; Trout, T.J.; Comas, L.H. Comparison of canopy temperature-based water stress indices for maize. Agric. Water Manag. 2015, 156, 51–62. [Google Scholar] [CrossRef]
- Allen, R.G.; Tasumi, M.; Morse, A.; Trezza, R.; Wright, J.L.; Bastiaanssen, W.; Kramber, W.; Lorite, I.; Robison, C.W. Satellite-based energy balance for mapping evapotranspiration with internalized calibration (METRIC)—Applications. J. Irrig. Drain. Eng. 2007, 133, 395–406. [Google Scholar] [CrossRef]
- Gowda, P.H.; Chavez, J.L.; Colaizzi, P.D.; Evett, S.R.; Howell, T.A.; Tolk, J.A. ET mapping for agricultural water management: Present status and challenges. Irrig. Sci. 2008, 26, 223–237. [Google Scholar] [CrossRef] [Green Version]
- Corsi, C. History highlights and future trends of infrared sensors. J. Mod. Opt. 2010, 57, 1663–1686. [Google Scholar] [CrossRef]
- FLIR TAU 2 640 × 512 50 MM 12.4°HFOV—LWIR Thermal Imaging Camera Core 30 Hz. Available online: https://www.oemcameras.com/flir-tau-2-640-50mm-thermal-imaging-camera-core.h (accessed on 24 August 2021).
- Viper FLIR A65 45—FLIR A65 f = 13 mm (45 Degree lens)—Fixed Focus 640 × 512 Pixels Resolution/30 Hz 62613-0101. Available online: https://www.tequipment.net/Viper/FLIR-A65-45/Fixed-Mount-Thermal-Imagers// (accessed on 24 August 2021).
- Teledyne FLIR BOSON 640 × 512 8.7 MM 50° HFOV—LWIR Thermal Camera Core. Available online: hhttps://www.oemcameras.com/flir-boson-series.htm/flir-boson-640x480-8mm.htm (accessed on 24 August 2021).
- FLIR Lepton 3.5—500-0771-01. Available online: https://store.groupgets.com/products/flir-lepton-3-5 (accessed on 24 August 2021).
- Deane, S.; Avdelidis, N.P.; Ibarra-Castanedo, C.; Zhang, H.; Nezhad, H.Y.; Williamson, A.A.; Mackley, T.; Maldague, X.; Tsourdos, A.; Nooralishahi, P. Comparison of cooled and uncooled ir sensors by means of signal-to-noise ratio for ndt diagnostics of aerospace grade composites. Sensors 2020, 20, 3381. [Google Scholar] [CrossRef]
- Phantom Series. Available online: https://www.dji.com/au/products/phantom?site=brandsite&from=nav (accessed on 14 September 2021).
- Torun, E. UAV Requirements and Design Consideration; Technical Report; Turkish Land Forces Command Ankara: Ankara, Turkey, 2000. [Google Scholar]
- Kuiper, E.; Nadjm-Tehrani, S. Mobility models for UAV group reconnaissance applications. In Proceedings of the IEEE 2006 International Conference on Wireless and Mobile Communications (ICWMC’06), Bucharest, Romania, 29–31 July 2006; p. 33. [Google Scholar]
- Meola, C. Infrared Thermography Recent Advances and Future Trends; Bentham Science Publishers: Sharjah, United Arab Emirates, 2012. [Google Scholar]
- Meola, C.; Boccardi, S.; Carlomagno, G.M. Infrared Thermography in the Evaluation of Aerospace Composite Materials: Infrared Thermography to Composites; Woodhead Publishing: Sawston, UK, 2016. [Google Scholar]
- Silk, J. Cosmic black-body radiation and galaxy formation. Astrophys. J. 1968, 151, 459. [Google Scholar] [CrossRef]
- Würfel, P.; Finkbeiner, S.; Daub, E. Generalized Planck’s radiation law for luminescence via indirect transitions. Appl. Phys. A 1995, 60, 67–70. [Google Scholar] [CrossRef]
- Brainard, G.C.; Sliney, D.; Hanifin, J.P.; Glickman, G.; Byrne, B.; Greeson, J.M.; Jasser, S.; Gerner, E.; Rollag, M.D. Sensitivity of the human circadian system to short-wavelength (420-nm) light. J. Biol. Rhythm. 2008, 23, 379–386. [Google Scholar] [CrossRef] [Green Version]
- The Electromagnetic Spectrum. Available online: https://imagine.gsfc.nasa.gov/science/toolbox/emspectrum1.html (accessed on 30 May 2021).
- Kingston, R.H. Detection of Optical and Infrared Radiation; Springer: Berlin/Heidelberg, Germany, 2013; Volume 10. [Google Scholar]
- What Are Infrared Waves? Available online: https://science.nasa.gov/ems/07_infraredwaves (accessed on 30 May 2021).
- Deming, D.; Seager, S.; Richardson, L.J.; Harrington, J. Infrared radiation from an extrasolar planet. Nature 2005, 434, 740–743. [Google Scholar] [CrossRef] [Green Version]
- Becker, F.; Li, Z.L. Surface temperature and emissivity at various scales: Definition, measurement and related problems. Remote Sens. Rev. 1995, 12, 225–253. [Google Scholar] [CrossRef]
- Emissivity—Metals. Available online: https://www.flukeprocessinstruments.com/en-us/service-and-support/knowledge-center/infrared-technology/emissivity-metals/ (accessed on 30 May 2021).
- How Does Emissivity Affect Thermal Imaging? Available online: https://www.flir.com.au/discover/professional-tools/how-does-emissivity-affect-thermal-imaging/ (accessed on 30 May 2021).
- Khanam, F.T.Z.; Chahl, L.A.; Chahl, J.S.; Al-Naji, A.; Perera, A.G.; Wang, D.; Lee, Y.; Ogunwa, T.T.; Teague, S.; Nguyen, T.X.B.; et al. Noncontact Sensing of Contagion. J. Imaging 2021, 7, 28. [Google Scholar] [CrossRef]
- Khattak, S.; Papachristos, C.; Alexis, K. Marker based thermal-inertial localization for aerial robots in obscurant filled environments. In International Symposium on Visual Computing; Springer: Berlin/Heidelberg, Germany, 2018; pp. 565–575. [Google Scholar]
- Belliveau, R.G.; DeJong, S.A.; Boltin, N.D.; Lu, Z.; Cassidy, B.M.; Morgan, S.L.; Myrick, M. Mid-infrared emissivity of nylon, cotton, acrylic, and polyester fabrics as a function of moisture content. Text. Res. J. 2020, 90, 1431–1445. [Google Scholar] [CrossRef]
- Fetić, A.; Jurić, D.; Osmanković, D. The procedure of a camera calibration using Camera Calibration Toolbox for MATLAB. In Proceedings of the IEEE 2012 35th International Convention MIPRO, Opatija, Croatia, 21–25 May 2012; pp. 1752–1757. [Google Scholar]
- Wang, Y.; Li, Y.; Zheng, J. A camera calibration technique based on OpenCV. In Proceedings of the IEEE 3rd International Conference on Information Sciences and Interaction Sciences, Chengdu, China, 23–25 June 2010; pp. 403–406. [Google Scholar]
- Li, B.; Heng, L.; Koser, K.; Pollefeys, M. A multiple-camera system calibration toolbox using a feature descriptor-based calibration pattern. In Proceedings of the IEEE 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1301–1307. [Google Scholar]
- Usamentiaga, R.; Garcia, D.; Ibarra-Castanedo, C.; Maldague, X. Highly accurate geometric calibration for infrared cameras using inexpensive calibration targets. Measurement 2017, 112, 105–116. [Google Scholar] [CrossRef]
- Knyaz, V.; Moshkantsev, P. Joint geometric calibration of color and thermal cameras for synchronized multimodal dataset creating. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 79–84. [Google Scholar] [CrossRef] [Green Version]
- Engström, P.; Larsson, H.; Rydell, J. Geometric calibration of thermal cameras. In Electro-Optical Remote Sensing, Photonic Technologies, and Applications VII; and Military Applications in Hyperspectral Imaging and High Spatial Resolution Sensing; International Society for Optics and Photonics: Bellingham, WA, USA, 2013; Volume 8897, p. 88970C. [Google Scholar]
- Luhmann, T.; Piechel, J.; Roelfs, T. Geometric calibration of thermographic cameras. In Thermal Infrared Remote Sensing; Springer: Berlin/Heidelberg, Germany, 2013; pp. 27–42. [Google Scholar]
- Yang, R.; Yang, W.; Chen, Y.; Wu, X. Geometric calibration of IR camera using trinocular vision. J. Light. Technol. 2011, 29, 3797–3803. [Google Scholar] [CrossRef]
- Vidas, S.; Lakemond, R.; Denman, S.; Fookes, C.; Sridharan, S.; Wark, T. A mask-based approach for the geometric calibration of thermal-infrared cameras. IEEE Trans. Instrum. Meas. 2012, 61, 1625–1635. [Google Scholar] [CrossRef] [Green Version]
- FLIR Corp. FLIR Lepton Engineering Data Sheet; FLIR Corp.: Wilsonville, OR, USA, 2014. [Google Scholar]
- Bloesch, M.; Burri, M.; Omari, S.; Hutter, M.; Siegwart, R. Iterated extended Kalman filter based visual-inertial odometry using direct photometric feedback. Int. J. Robot. Res. 2017, 36, 1053–1072. [Google Scholar] [CrossRef] [Green Version]
- Mouats, T.; Aouf, N.; Chermak, L.; Richardson, M.A. Thermal stereo odometry for UAVs. IEEE Sens. J. 2015, 15, 6335–6347. [Google Scholar] [CrossRef] [Green Version]
- Papachristos, C.; Mascarich, F.; Alexis, K. Thermal-inertial localization for autonomous navigation of aerial robots through obscurants. In Proceedings of the IEEE 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 394–399. [Google Scholar]
- Rosser, K.; Nguyen, T.X.B.; Moss, P.; Chahl, J. Low complexity visual UAV track navigation using long-wavelength infrared. J. Field Robot. 2021. [Google Scholar] [CrossRef]
- Bradski, G.; Kaehler, A. OpenCV. Dr. Dobb’s J. Softw. Tools 2000, 3, 20–245. [Google Scholar]
- Shi, J. Good features to track. In Proceedings of the 1994 IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; pp. 593–600. [Google Scholar]
- Lucas, B.D.; Kanade, T. An Iterative Image Registration Technique With an Application to Stereo Vision. In Proceedings of the 7th International Joint Conference on Artificial Intelligence (IJCAI), Vancouver, BC, Canada, 24–28 August 1981. [Google Scholar]
- Borges, P.V.K.; Vidas, S. Practical infrared visual odometry. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2205–2213. [Google Scholar] [CrossRef]
- Durrant-Whyte, H.; Dissanayake, M.; Gibbens, P. Toward deployment of large scale simultaneous localisation and map building (SLAM) systems. In Robotics Research; Springer: Berlin/Heidelberg, Germany, 2000; pp. 161–167. [Google Scholar]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef] [Green Version]
- Leonard, J.J.; Durrant-Whyte, H.F. Mobile robot localization by tracking geometric beacons. IEEE Trans. Robot. Autom. 1991, 7, 376–382. [Google Scholar] [CrossRef]
- Montemerlo, M.; Thrun, S.; Koller, D.; Wegbreit, B. FastSLAM: A factored solution to the simultaneous localization and mapping problem. In Proceedings of the AAAI/IAAI 2002, Edmonton, AB, Canada, 28 July–1 August 2002; pp. 593–598. [Google Scholar]
- Montemerlo, M.; Thrun, S.; Koller, D.; Wegbreit, B. FastSLAM 2.0: An improved particle filtering algorithm for simultaneous localization and mapping that provably converges. In Proceedings of the IJCAI, Acapulco, Mexico, 9–15 August 2003; Volume 3, pp. 1151–1156. [Google Scholar]
- Dellaert, F.; Kaess, M. Square Root SAM: Simultaneous localization and mapping via square root information smoothing. Int. J. Robot. Res. 2006, 25, 1181–1203. [Google Scholar] [CrossRef] [Green Version]
- Kim, C.; Sakthivel, R.; Chung, W.K. Unscented FastSLAM: A robust algorithm for the simultaneous localization and mapping problem. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 2439–2445. [Google Scholar]
- Taketomi, T.; Uchiyama, H.; Ikeda, S. Visual SLAM algorithms: A survey from 2010 to 2016. IPSJ Trans. Comput. Vis. Appl. 2017, 9, 1–11. [Google Scholar] [CrossRef]
- Maddern, W.; Vidas, S. Towards robust night and day place recognition using visible and thermal imaging. In Proceedings of the RSS 2012 Workshop: Beyond Laser and Vision: Alternative Sensing Techniques for Robotic Perception; University of Sydney: Sydney, Australia, 2012; pp. 1–6. [Google Scholar]
- Poujol, J.; Aguilera, C.A.; Danos, E.; Vintimilla, B.X.; Toledo, R.; Sappa, A.D. A visible-thermal fusion based monocular visual odometry. In Robot 2015: Second Iberian Robotics Conference; Springer: Berlin/Heidelberg, Germany, 2016; pp. 517–528. [Google Scholar]
- Rasmussen, N.D.; Morse, B.S.; Goodrich, M.A.; Eggett, D. Fused visible and infrared video for use in wilderness search and rescue. In Proceedings of the IEEE 2009 Workshop on Applications of Computer Vision (WACV), Snowbird, UT, USA, 7–8 December 2009; pp. 1–8. [Google Scholar]
- Geiger, A.; Ziegler, J.; Stiller, C. Stereoscan: Dense 3d reconstruction in real-time. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011; pp. 963–968. [Google Scholar]
- Brunner, C.; Peynot, T. Visual metrics for the evaluation of sensor data quality in outdoor perception. In Proceedings of the 10th Performance Metrics for Intelligent Systems Workshop, Baltimore, MD, USA, 28–30 September 2010; pp. 1–8. [Google Scholar]
- Brunner, C.; Peynot, T.; Vidal-Calleja, T.; Underwood, J. Selective combination of visual and thermal imaging for resilient localization in adverse conditions: Day and night, smoke and fire. J. Field Robot. 2013, 30, 641–666. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Sun, L.; Yang, T.; Fan, L.; Huang, K.; Xuanyuan, Z. RGB-T SLAM: A flexible SLAM framework by combining appearance and thermal information. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5682–5687. [Google Scholar]
- Mouats, T.; Aouf, N.; Sappa, A.D.; Aguilera, C.; Toledo, R. Multispectral stereo odometry. IEEE Trans. Intell. Transp. Syst. 2014, 16, 1210–1224. [Google Scholar] [CrossRef]
- Khattak, S.; Papachristos, C.; Alexis, K. Visual-thermal landmarks and inertial fusion for navigation in degraded visual environments. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–9. [Google Scholar]
- Shin, Y.S.; Kim, A. Sparse depth enhanced direct thermal-infrared slam beyond the visible spectrum. IEEE Robot. Autom. Lett. 2019, 4, 2918–2925. [Google Scholar] [CrossRef] [Green Version]
- Khattak, S.; Papachristos, C.; Alexis, K. Keyframe-based thermal–inertial odometry. J. Field Robot. 2020, 37, 552–579. [Google Scholar] [CrossRef]
- Horn, B.K.; Schunck, B.G. Determining optical flow. Artif. Intell. 1981, 17, 185–203. [Google Scholar] [CrossRef] [Green Version]
- Chahl, J.; Mizutani, A. Biomimetic attitude and orientation sensors. IEEE Sens. J. 2010, 12, 289–297. [Google Scholar] [CrossRef]
- Chahl, J.S.; Srinivasan, M.V.; Zhang, S.W. Landing strategies in honeybees and applications to uninhabited airborne vehicles. Int. J. Robot. Res. 2004, 23, 101–110. [Google Scholar] [CrossRef]
- Srinivasan, M.V.; Zhang, S.; Altwein, M.; Tautz, J. Honeybee Navigation: Nature and Calibration of the “Odometer”. Science 2000, 287, 851–853. [Google Scholar] [CrossRef]
- Srinivasan, M.V. Honey bees as a model for vision, perception, and cognition. Annu. Rev. Entomol. 2010, 55, 267–284. [Google Scholar] [CrossRef]
- Rosser, K.; Chahl, J. Reducing the complexity of visual navigation: Optical track controller for long-range unmanned aerial vehicles. J. Field Robot. 2019, 36, 1118–1140. [Google Scholar] [CrossRef]
- Honegger, D.; Meier, L.; Tanskanen, P.; Pollefeys, M. An open source and open hardware embedded metric optical flow cmos camera for indoor and outdoor applications. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 1736–1741. [Google Scholar]
- Yoo, D.W.; Won, D.Y.; Tahk, M.J. Optical flow based collision avoidance of multi-rotor uavs in urban environments. Int. J. Aeronaut. Space Sci. 2011, 12, 252–259. [Google Scholar] [CrossRef] [Green Version]
- Grabe, V.; Bülthoff, H.H.; Giordano, P.R. On-board velocity estimation and closed-loop control of a quadrotor UAV based on optical flow. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St Paul, MN, USA, 14–18 May 2012; pp. 491–497. [Google Scholar]
- Miller, A.; Miller, B.; Popov, A.; Stepanyan, K. UAV landing based on the optical flow videonavigation. Sensors 2019, 19, 1351. [Google Scholar] [CrossRef] [Green Version]
- Gageik, N.; Strohmeier, M.; Montenegro, S. An autonomous UAV with an optical flow sensor for positioning and navigation. Int. J. Adv. Robot. Syst. 2013, 10, 341. [Google Scholar] [CrossRef]
- Bradski, G.; Kaehler, A. Learning OpenCV: Computer Vision with the OpenCV Library; O’Reilly Media, Inc.: Newton, MA, USA, 2008. [Google Scholar]
- Smolyanskiy, N.; Kamenev, A.; Smith, J.; Birchfield, S. Toward low-flying autonomous MAV trail navigation using deep neural networks for environmental awareness. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 4241–4247. [Google Scholar]
- McGuire, K.; De Croon, G.; De Wagter, C.; Tuyls, K.; Kappen, H. Efficient optical flow and stereo vision for velocity estimation and obstacle avoidance on an autonomous pocket drone. IEEE Robot. Autom. Lett. 2017, 2, 1070–1076. [Google Scholar] [CrossRef] [Green Version]
- Heng, L.; Honegger, D.; Lee, G.H.; Meier, L.; Tanskanen, P.; Fraundorfer, F.; Pollefeys, M. Autonomous visual mapping and exploration with a micro aerial vehicle. J. Field Robot. 2014, 31, 654–675. [Google Scholar] [CrossRef]
- Zhang, X.; Xian, B.; Zhao, B.; Zhang, Y. Autonomous flight control of a nano quadrotor helicopter in a GPS-denied environment using on-board vision. IEEE Trans. Ind. Electron. 2015, 62, 6392–6403. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Choi, Y.; Kim, N.; Hwang, S.; Kweon, I.S. Thermal image enhancement using convolutional neural network. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 223–230. [Google Scholar]
- Dong, C.; Loy, C.C.; He, K.; Tang, X. Image super-resolution using deep convolutional networks. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 38, 295–307. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Wright, J.; Huang, T.S.; Ma, Y. Image super-resolution via sparse representation. IEEE Trans. Image Process. 2010, 19, 2861–2873. [Google Scholar] [CrossRef]
- Choi, Y.; Kim, N.; Hwang, S.; Park, K.; Yoon, J.S.; An, K.; Kweon, I.S. KAIST multi-spectral day/night data set for autonomous and assisted driving. IEEE Trans. Intell. Transp. Syst. 2018, 19, 934–948. [Google Scholar] [CrossRef]
- Kristoffersen, M.S.; Dueholm, J.V.; Gade, R.; Moeslund, T.B. Pedestrian counting with occlusion handling using stereo thermal cameras. Sensors 2016, 16, 62. [Google Scholar] [CrossRef] [Green Version]
- Barrera, F.; Lumbreras, F.; Sappa, A.D. Multispectral piecewise planar stereo using Manhattan-world assumption. Pattern Recognit. Lett. 2013, 34, 52–61. [Google Scholar] [CrossRef]
- Saputra, M.R.U.; de Gusmao, P.P.; Lu, C.X.; Almalioglu, Y.; Rosa, S.; Chen, C.; Wahlström, J.; Wang, W.; Markham, A.; Trigoni, N. Deeptio: A deep thermal-inertial odometry with visual hallucination. IEEE Robot. Autom. Lett. 2020, 5, 1672–1679. [Google Scholar] [CrossRef] [Green Version]
- Clark, R.; Wang, S.; Wen, H.; Markham, A.; Trigoni, N. Vinet: Visual-inertial odometry as a sequence-to-sequence learning problem. In Proceedings of the AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017; Volume 31. [Google Scholar]
- Chen, C.; Rosa, S.; Miao, Y.; Lu, C.X.; Wu, W.; Markham, A.; Trigoni, N. Selective sensor fusion for neural visual-inertial odometry. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 10542–10551. [Google Scholar]
- Longwave Infrared Thermal Camera Core Tau™ 2. Available online: https://www.flir.com.au/products/tau-2/ (accessed on 24 June 2021).
- FLIR Exportation Conditions. Available online: https://www.flircameras.com/export_conditions (accessed on 24 June 2021).
- Flying at Night. Available online: https://www.casa.gov.au/drones/reoc/flying-at-night/ (accessed on 24 June 2021).
- Pi Camera Module v2. Available online: https://www.raspberrypi.org/documentation/hardware/camera/ (accessed on 24 June 2021).
- Treible, W.; Saponaro, P.; Sorensen, S.; Kolagunda, A.; O’Neal, M.; Phelan, B.; Sherbondy, K.; Kambhamettu, C. Cats: A color and thermal stereo benchmark. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2961–2969. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Dimension | Weight | Resolution | Fps | Radiometric | Power | Platform | Cost | Released |
|---|---|---|---|---|---|---|---|---|---|
| Thermal-Eye 2000B | 282 × 279 × 290 mm | 4.54 kg | 320 × 240 | 12.5 | No | 28 W | UGV | discontinued | n/a |
| Gobi-640-GigE | 49 × 49 × 79 mm | 263 g | 640 × 480 | 50 | No | 4.5 W | UGV | discontinued | 2008 |
| Miricle 307 K | 45 × 52 × 48 mm | 95 g | 640 × 480 | 15 | No | 3.3 W | UAV | discontinued | 2006 |
| FLIR Tau2 | 44.5 × 44.5 × 30 mm | <70 g | 640 × 480 | 60 | Yes | 1 W | UAV | $6500 [27] | 2015 |
| FLIR A65 | 120 × 125 × 280 mm | 200 g | 640 × 512 | 30 | Yes | 3.5 W | UAV | $7895 [28] | 2016 |
| FLIR Boson | 21 × 21 × 11 mm | 7.5 g | 640 × 512 | 60 | Yes | 0.5 W | UAV | $3520 [29] | 2020 |
| FLIR Lepton 3.5 | 10.5 × 12.7 × 7.14 mm | 0.9 g | 160 × 120 | 8.7 | Yes | 0.15 W | UAV | $199 [30] | 2018 |
| Material | Emissivity Value | |
|---|---|---|
| Metal | Aluminium: oxidised | 0.4 |
| Aluminium: polished | 0.05 | |
| Brass: oxidised | 0.6 | |
| Brass: polished | 0.02 | |
| Copper: oxidised | 0.71 | |
| Copper: polished | 0.03 | |
| Non-metal | Clay | 0.95 |
| Ice | 0.98 | |
| Rubber | 0.95 | |
| Water | 0.93 | |
| Glass | 0.98 |
| Feature Detection Setting | Maximum corners | 1000 |
| Quality level | 0.02 | |
| Minimum distance | 5 | |
| Block size | 5 | |
| LK Settings | Window size | (15,15) |
| Maximum pyramid level | 2 | |
| Search termination count | 10 | |
| Search termination | 0.03 |
| Work | Sensors Configuration | 8-Bit/14-Bit | Sensor Name | Resolution | FPS | Navigation System | Navigation Task |
|---|---|---|---|---|---|---|---|
| Maddern and Vidas [76] | Combine | 8 | Thermoteknix Miricle 307K | 640 × 480 | 15 | Map-building | Mapping |
| Brunner et al. [81] | Combine | 8 | Raytheon Thermal-Eye 2000B | 480 × 576 | 12.5 | Map-building | Visual-SLAM |
| Shin et al. [85] | Thermal only | 14 | FLIR A65 | 640 × 512 | 30 | Map-building | Visual-SLAM |
| Chen et al. [82] | Combine | n/a | n/a | n/a | n/a | Map-building | Visual-SLAM |
| Mouats et al. [83] | Combine | 8 | Gobi-640-GigE from Xenics | 640 × 480 | 50 | Map-building | Stereo odometry |
| Mouats et al. [61] | Thermal only | 8 | FLIR Tau2 | 640 × 480 | 30 | Map-building | Stereo odometry |
| Poujol et al. [77] | Combine | 8 | Gobi-640-GigE from Xenics | 640 × 480 | 50 | Map-building | Odometry |
| Khattak et al. [84] | Combine | 8 | FLIR Tau2 | 640 × 480 | 30 | Map-building | Odometry |
| Khattak et al. [48] | Thermal only | 8 | FLIR Tau2 | 640 × 480 | 30 | Map-building | Odometry |
| Khattak et al. [86] | Thermal only | 14 | FLIR Tau2 | 640 × 480 | 30 | Map-building | Odometry |
| Rosser et al. [63] | Thermal only | 8 | FLIR Lepton 3.5 | 160 × 120 | 8.7 | Mapless | Odometry |
| Choi et al. [104] | Thermal only | 8 | n/a | n/a | n/a | Deep learning | Thermal image enhancement |
| Saputra et al. [110] | Thermal only | 8 | Flir Boson/FLIR E95 | 640 × 512/464 × 348 | 60/60 | Deep learning | Odometry |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.X.B.; Rosser, K.; Chahl, J. A Review of Modern Thermal Imaging Sensor Technology and Applications for Autonomous Aerial Navigation. J. Imaging 2021, 7, 217. https://doi.org/10.3390/jimaging7100217
Nguyen TXB, Rosser K, Chahl J. A Review of Modern Thermal Imaging Sensor Technology and Applications for Autonomous Aerial Navigation. Journal of Imaging. 2021; 7(10):217. https://doi.org/10.3390/jimaging7100217
Chicago/Turabian StyleNguyen, Tran Xuan Bach, Kent Rosser, and Javaan Chahl. 2021. "A Review of Modern Thermal Imaging Sensor Technology and Applications for Autonomous Aerial Navigation" Journal of Imaging 7, no. 10: 217. https://doi.org/10.3390/jimaging7100217
APA StyleNguyen, T. X. B., Rosser, K., & Chahl, J. (2021). A Review of Modern Thermal Imaging Sensor Technology and Applications for Autonomous Aerial Navigation. Journal of Imaging, 7(10), 217. https://doi.org/10.3390/jimaging7100217