1. Introduction
In this paper, we consider the solution of large-scale linear systems of the form
We are interested in problems (
1) associated with the discretization of linear inverse problems, where
represents the measured data,
represents the forward mapping,
is the desired solution, and
is unknown Gaussian white noise. In this setting,
A is typically ill-conditioned with ill-determined rank (i.e., the singular values of
A decay and cluster at zero without an evident gap between two consecutive ones). Systems such as (
1) are central in many imaging problems, including image deblurring, image inpainting, and computed tomography, where the matrix
A represents convolution, a combination of undersampling and convolution, and discrete Radon transform, respectively; see [
1,
2,
3]. In this framework,
is a vectorialization of a 2D image
, with
, obtained, for instance, by stacking the columns of
; we compactly denote this operation by
and its inverse by
.
Due to the ill-conditioning of
A and the presence of noise
e in (
1), some regularization must be applied in order to compute a meaningful approximation of
. Although many efficient iterative methods are routinely used to regularize (
1) by early termination of the iterations (see, e.g., [
4,
5,
6,
7] and the references therein), in this paper, we consider a variational regularization method to compute
where
is a problem-specific regularizer, chosen to enforce a priori information about
onto the regularized solution
, and
is regularization parameter that specifies the amount of regularization to be imposed. Common and somewhat basic choices for the penalty term include
and
with
, corresponding to standard and generalized Tikhonov regularization, respectively. Although such choices reduce (
2) to a quadratic problem, two drawbacks arise when 2-norm regularization is applied to solve inverse problems in imaging, where
A is typically unstructured and large-scale: firstly, an iterative solver must be employed to compute
(see [
1,
4,
5,
8] and the references therein); secondly,
may be inherently over-smoothed and therefore unsuitable when edge information should be accurately recovered (see [
2]). To overcome the second drawback, one should resort to functionals
involving some
q-(quasi)norm,
, and solve (
2) using appropriate optimization methods: there is a rich body of literature about this, and we point to [
9] for a recent survey.
In this paper, we consider the edge information that is revealed by computing the gradient of an image, and, in this setting, one of the most popular edge-enhancing regularizers is total variation (TV) [
10]. In its original form and in a discrete setting, the TV of a vector
x measures the magnitude of the discrete gradient of
x in the
norm; recall that, in this paper,
. Therefore, considering TV as a regularizer has the effect of allowing a few (possibly steep) changes in the gradient of
or, equivalently, solutions with a sparse gradient. TV-like functionals, which may penalize the gradient in the horizontal and vertical directions separately, or use a variety of norms for evaluating the gradient to enforce even more sparsity, have also been considered. Among the most popular solvers for TV regularization, we list proximal gradient methods, hybrid primal–dual methods, split Bregman methods, and iteratively reweighted norm methods; we refer to [
11,
12,
13,
14,
15,
16].
In this paper, we focus on the class of iteratively reweighted least squares (IRLS) solvers, also called iteratively reweighted norm (IRN) solvers, associated with TV-like and edge-enhancing functionals. IRLS methods solve (approximately) a sequence of reweighted, penalized, least squares (LS) problems that are increasingly improved approximations of (
2). Consider the reformulation of (
2) as a nonlinear optimization problem of the form
where
and
is a diagonal weighting matrix whose entries depend on
. Formulating (
2) (or a smooth approximation thereof) as (
3) is quite straightforward when, e.g.,
; see [
17]. Starting from an initial approximation
of
, the IRLS method solves (approximately) a sequence of quadratic problems of the form
and convergence of
to
is guaranteed under mild assumptions; see, e.g., [
18,
19] and the references therein. All but one of the methods considered in this paper can be reformulated as (
3). The specific expressions of the matrices
,
, and
L appearing in (
3) and (
4) depend on the choice of TV-like regularizer, and will be detailed in
Section 2. We also mention that some IRLS schemes (
4), including one considered later in this paper, are not necessarily associated with a variational formulation of the kind in (
2) and (
3); see [
20,
21] for more details. If the null spaces of
A and
intersect trivially, problem (
4) has the unique solution
However, as hinted at the beginning of this section, for large-scale unstructured problems (
1), it is too demanding to compute
directly and, therefore, an iterative method (usually a Krylov projection method, which relies on the computation of matrix–vector products with
A,
, and often their transposes) should be employed to approximate
. As a consequence, classical IRLS methods unavoidably rely on inner–outer iterative schemes, where the outer iteration updates the weights
, while the inner iteration solves each (iteratively reweighted) least squares problem. To the best of our knowledge, an IRN approach for TV was first proposed in [
22], where an expression for the edge-enhancing weights was first derived; more specifically, the authors of [
22] consider a fixed regularization parameter and solve each least squares problem in the sequence by the conjugate gradient method. In a similar setting (stemming from the lagged diffusivity fixed point iteration [
11]), the authors of [
12] propose to use the so-called ‘modified’ LSQR method to solve efficiently each least squares problem in the sequence after performing a change of variable that involves the ‘inversion’ of the matrix
, with the added benefit of adaptive regularization parameter choice.
Recently, novel solvers for IRLS have been proposed, which approximate the solution of (
2) by avoiding nested iteration cycles. This is possible by updating the weights
as soon as a new approximate solution becomes available—namely, immediately after a new iteration of a solver for the iteratively reweighted LS problem (
4) is computed—and by employing modified Krylov projection methods that can handle changes in the LS problem (specifically, changes in the weights). Such solvers are based either on generalized Krylov subspace (GKS) methods (see [
19,
23]), or on flexible Krylov subspace (FKS) methods (see [
17,
24,
25]). Rather than computing the solution
as in (
4), the
kth iteration of a GKS method computes an approximation
to
by projecting problem (
4) onto a so-called ‘generalized Krylov subspace’ of dimension
k, which is then extended in the direction of the residual
. Such methods can be efficiently applied to a variety of regularization terms of the form
, provided that matrix–vector products with
L are cheap to compute. To project problem (
4) onto the current approximation subspace, it may be necessary to compute economy-size QR decompositions of
and
matrices, but this is not demanding when
. Flexible Krylov methods can be applied only after problem (
4) has been transformed into standard form [
26]—namely, after a change of variables has been applied and (
4) has been reformulated as an equivalent Tikhonov problem with a regularization term of the form
and with
A replaced by an operator that includes the action of the (‘inverted’) matrix
. Sometimes, the ‘inversion’ of the matrix
is referred to as ‘priorconditioning’ because of its connection with a Bayesian approach to inverse problems [
27]. More details about this process are provided in
Section 3. In particular, the
kth iteration of a flexible Krylov method generates an approximation subspace of dimension
k that incorporates the action of the ‘inverted’ weights
,
, and its efficiency depends on the considered regularizer and the cost associated with the ‘inversion’ of
. For a variety of regularization terms (see, e.g., [
24,
25,
28]), this can be done with negligible computational overhead. Convergence of both GKS and FKS methods can be proven by resorting to the framework of majorization–minimization (MM) methods [
29]. Both GKS and FKS methods allow adaptive (i.e., iteration-dependent) regularization parameter choice, which is crucial in the common scenario where a good value of
is not known a priori. Indeed, allowing some heuristic arguments, a suitable value of the regularization parameter can be efficiently chosen at the
kth iteration by manipulating a reduced-size projected problem, rather than having to solve the original problem (
2) multiple times, one for each value of
(preset by the user or dictated by the application of some parameter choice rule); more details about these approaches are provided in
Section 4. A review of GKS and FKS methods for regularization is available in [
18].
This paper aims at introducing new solvers for (
2) based on the flexible Golub–Kahan (FGK) decomposition [
30], introducing significant elements of novelty with respect to available solvers based on either FKS or GKS methods. Firstly, while ways of handling ‘sparsity under transform’ regularizers within a FKS framework were already presented in [
24], these require an orthogonal ‘sparsity transformation’ (e.g., some choices of wavelets). The edge-enhancing regularizers considered in this paper are more general and more challenging to apply, as often the ‘sparsity transformation’ associated with the gradient of an image is rank-deficient and suitable strategies have to be devised to perform efficient computations, leading to a unified treatment of both the isotropic and anisotropic TV regularization terms, as well as other heuristic edge-enhancing regularizers. Similarly to the methods described in [
24], convenient strategies to set the regularization parameter can be applied, resulting in inherently parameter-free solvers. We refer to
Section 4 for more details. Secondly, although the idea of incorporating an edge-enhancing regularizer within a flexible Krylov method based on the flexible Arnoldi algorithm (i.e., FGMRES) was already proposed in [
30], this is limited to the case of isotropic TV and a square matrix
A; moreover, it is well-known that iterative solvers based on the Arnoldi algorithm are not general-purpose regularization methods and are only successful for matrices
A close to normal or when the generated approximation subspace is favorable for a particular solution; we refer to [
31] for more details about GMRES, which can be extended to FGMRES. We also note that, when adopting the method in [
30], the regularization parameter should be set to 0 in the projected problem—this is not the case anymore when the new FGK-based solvers are considered. Lastly, while TV regularizers can be naturally handled by GKS-based methods [
19,
23], the approximation subspace for the solution generated by the new FGK-based solvers is potentially more efficient than the approximation subspace generated by GKS-based solvers, meaning that a high-quality solution can be recovered in smaller approximation subspaces; this is clearly visible in the numerical comparisons presented in
Section 5.
The new FGK-based solvers are analyzed theoretically. Namely, a convergence proof is provided for the isotropic and anisotropic TV cases, and insight into the efficient approximate ‘inversion’ of all the considered regularizers is provided. Finally, extensive numerical experimentation (some of which is reported in this paper) shows that the new solvers are always able to compute regularized solutions of comparable or better quality, often with a great speedup, with respect to other edge-enhancing methods, such as the IRN and GKS strategies, and the proximal gradient solver. We refer to
Section 5 for detailed comparisons.
This paper is organized as follows.
Section 2 presents the regularization terms considered in this paper and the expressions for the edge-enhancing weighting matrices.
Section 3 contains some background material, including a summary of the procedure for transforming problem (
4) into standard form, and some details about FKS methods based on the flexible Golub–Kahan decomposition (FGK).
Section 4 introduces the new edge-enhancing solvers based on FGK, and describes their properties and implementation details.
Section 5 contains numerical experiments performed on three different imaging problems (involving deblurring, inpainting, and tomography).
Section 6 presents some concluding remarks and possible future research directions.
3. Background Material: Standard Form Transformation and (Flexible) Krylov Solvers
As discussed in
Section 1, when dealing with large-scale unstructured problems (
1), each least squares problem of the form (
4) arising within an IRLS method needs to be solved by an iterative method, resulting in an overall inner–outer iterative scheme for the solution of (
2). Since the regularization parameter
needs to be chosen, we adopt a so-called hybrid method [
5,
6], which typically projects the original problem (
1) onto Krylov subspaces of increasing dimension and applies regularization to the projected problem, allowing for an efficient, adaptive (iteration-dependent) choice of
. More details on the projection process are given in the next paragraph.
For particular instances of (
2), e.g., for standard Tikhonov with
, first projecting (
1) and then applying standard Tikhonov to the projected problem is equivalent to first applying standard Tikhonov (
2) and then projecting the regularized problem; see [
1] (Chapter 6). The application of hybrid methods to Tikhonov regularized problems in general form, such as the ones in the sequence (
4), is usually not straightforward and one possible approach is to first perform a transformation into standard Tikhonov form, and then apply a hybrid method to the transformed problem; see, e.g., [
1,
33]. In the following, we will tailor our discussions to the case
, where
as in (
8),
as in (
10), or
as in (
11). We remark that, since all these diagonal weighting matrices are nonsingular, the null spaces of both
and
are spanned by the constant vectors, i.e., multiples of
. Problem (
4) specifically formulated for these cases reads
Let us assume that the null spaces of
and
intersect trivially; this is a reasonable assumption, as the null space of
A is typically spanned by highly oscillatory vectors; see [
1] (Chapter 2). Then, problem (
12) has a unique solution
, which can be equivalently expressed by computing
In the above formulation, the matrix
is the so-called
A-weighted pseudoinverse of
, and
is expressed as the sum of two components: the first term belongs to the range of
, while the second term
belongs to the null space of
. We refer to [
26,
34] for detailed derivations. In practice, following [
33] and letting
be the ‘matrix’ whose orthonormal column spans the null space of
, we can rewrite
and
is the Moore–Penrose pseudoinverse of
. We also have
Computing
as in (
15) and performing matrix–vector products with the matrix
E defined in (
14) is computationally very cheap. Indeed, by letting
, it follows that
Computing
is nontrivial, and strategies to deal with this are explained in
Section 4.
We now describe how problem (
13) can be efficiently solved via a Krylov projection method based on the Golub–Kahan bidiagonalization (GKB) algorithm [
35] applied to
and
, whose
ith iteration updates partial factorizations of the form
where
and
, with
, are matrices whose orthonormal columns span the Krylov subspaces
and
, respectively;
and
are lower bidiagonal matrices, and
coincides with
without its last column. We refer to [
1] (§ 6.3) for more details. The cost of updating factorizations (
17) is dominated by four matrix–vector products (namely, with
A,
,
,
) at each iteration. We impose that the
ith approximation
of
belongs to the space
, i.e., we compute
and where
denotes the first canonical basis vector of
. The projected Tikhonov problem in (
18) is of size
and it is obtained by exploiting decomposition (
17) and the properties of the matrices appearing therein. The regularization parameter
can be efficiently set at each iteration, using well-known parameter choice strategies; see, e.g., [
6] (§ 3). The corresponding
ith approximation
to problem (
12) is computed by taking
We see that
defined above is computed by a hybrid projection method applied to problem (
12), after transformation into standard form; we refer to [
6] for more details. We remark that, when a Krylov projection method (and, in particular, a GKB-based method) is applied to approximate the solution to (
13), the regularization matrix
affects the approximation subspace for the solution (typically improving it), and
can be formally regarded as an appropriate preconditioner for the linear system in (
1) (although usually it does not speed up the convergence of the Krylov solver); we refer to [
1,
33] (Chapter 8) for more details.
Although hybrid projection methods applied to (
12) can, in general, be very efficient (meaning that, for each
a suitable approximation
of
in (
19) is computed for
), they are still employed within an inner–outer iterative scheme that can become computationally demanding; see the results of the numerical tests reported in
Section 5. In particular, the approximation subspace (
19) for the solution of the
kth problem is discarded when solving the
th problem in the sequence (
12). Hybrid flexible Krylov methods have been introduced to bypass the inner–outer iterative scheme associated with (
12) and generate only one solution subspace for approximating
by updating the weights as soon as a new approximation is computed. To apply flexible Krylov projection methods, problem (
12) must first be transformed into standard form (
13), so that the interpretation of
as a preconditioner can be exploited. In general, the
ith iteration of a hybrid flexible Krylov method computes
where the approximation subspace
has dimension
i and depends on
,
, and where different (more or less theoretically motivated) choices for an iteration-dependent regularization matrix
are possible; see [
17,
24,
25] for more details. Here, we focus on hybrid methods based on the flexible Golub–Kahan (FGK) decomposition [
24], whose
ith iteration updates partial factorizations of the form
Here,
is upper Hessenberg,
is upper triangular, and
and
have orthonormal columns, with
Similar to standard preconditioned GKB (
17), the cost of updating factorizations (
21) at the
ith iteration,
, is dominated by four matrix–vector products (namely, with
A,
,
,
). However, differently from GKB-based methods, the approximation subspace
, spanned by the columns of
, is no longer a Krylov subspace. Despite these differences, the FGK-based projected problem associated with (
20) computes
where
is a projected version of the regularization matrix
appearing in (
20); see also (
25) for more details. Problem (
23) is formally similar to (
18) and (
19). As in (
18), allowing some heuristics, the regularization parameter
in (
23) can be efficiently set at each iteration. We conclude this section by remarking that formulations (
18) and (
23) can be regarded as regularized LSQR and FLSQR solvers applied to (
1), respectively, and, even if not considered in this paper, other regularization methods based the on the GKB and FGK algorithms are possible. For instance, one may adopt strategies linked to LSMR and FLSMR, which result in formulations similar to (
18) and (
23), respectively, and which have also been proven successful for large-scale problems; see [
24,
36].
5. Numerical Experiments
In this section, we present the results of some numerical experiments that demonstrate the performance of the new edge-preserving FGK-based solvers, applied with the regularization terms and weightings described in
Section 2. We consider test problems modelling image deblurring of a piecewise constant image with low TV, inpainting combined with image deblurring for an image with high TV, and an undersampled computed tomography problem. To validate the new methods, we provide comparisons with the IRN methods [
16] equipped with the same regularization terms as the FGK-based methods, the GKS method for TV [
19,
23], a forward–backward solver for TV (FBTV) [
13], and an LSQR-based hybrid Krylov method for (
2), with
[
6]. The acronyms used to denote the different methods considered in this section, as well as a common color code employed in most figures, are summarized in
Table 1. When comparing with IRN (
4), we take
as the identity matrix,
, and compute each
,
using an LSQR-based hybrid Krylov method. When considering weights, the value
is chosen as a smoothing parameter in (
5) and (
11). When running the new FGK-based solvers, as well as the IRN, GKS, and LSQR-based hybrid methods,
is chosen at each iteration according to the discrepancy principle (
29), with
; the stopping criterion is given by (
31), with
(note that, in the IRN case, this holds only for the inner IRN iterations). The (fixed) regularization parameter used by the FBTV method is chosen for all the experiments as
, which is found experimentally to perform well; FBTV also requires the choice of a step-size
, which is determined either according to the forward–backward theory (i.e.,
, where
is the largest singular value of
A approximated by running a few LSQR iterations) or in an optimal way (i.e., by initially running 30 iterations of the FBTV method for different values of
logarithmically equispaced between
and
, and then selecting the parameter
that realizes the smallest residual norm). Unless otherwise stated, all algorithms run for 200 iterations, even if the stopping criterion (
31) is satisfied, to observe their long-term behavior; we indicate the iteration that satisfies the stopping criterion with a diamond marker in the relevant plots. In all experiments, the quality of the reconstructions is measured by both the relative restoration error (RRE)
and the structure similarity (SSIM) index between
and
[
38], where
is the solution computed at the
kth iteration of each solver. All experiments were performed in MATLAB R2020a and utilized functions from the IR Tools [
39] package; our codes are publicly available (MATLAB functions implementing the new FGK-based edge enhancing solvers and some test scripts are available on github,
https://github.com/silviagazzola/EdgeEnhancingFGK, accessed on 25 September 2021).
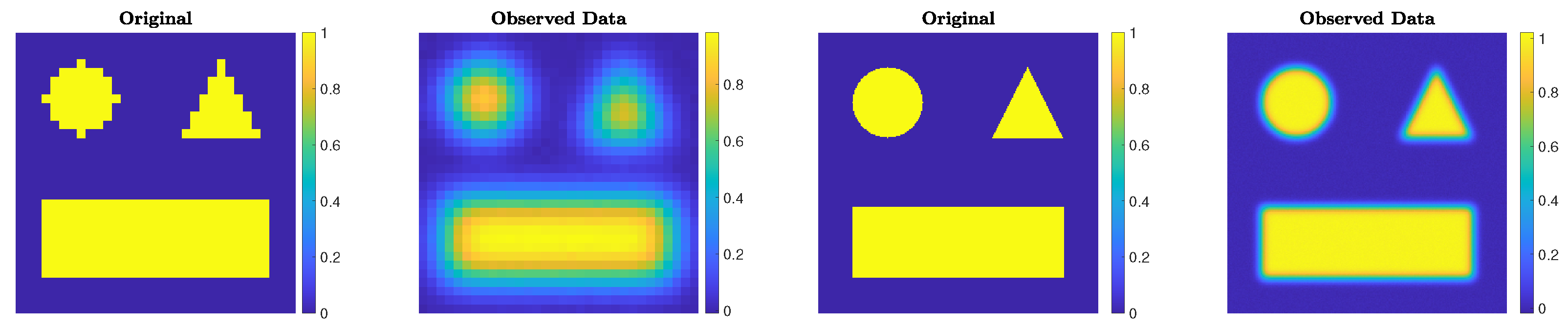
5.1. Experiment 1—Image Deblurring
The first experiment involves deblurring a piecewise constant test image displaying geometric patterns. We consider two versions of the test image, one of size
pixels and one of size
pixels. The images are corrupted by Gaussian blur and additive Gaussian white noise
e with relative noise level
. This test problem can be generated using the IR Tools package with
The choices
N = 32 and
blevel = ’mild’, and
N = 256 and
blevel = ’medium’, are made. The ground truths and the corrupted images are displayed in
Figure 1.
First of all, we compare the RREs achieved by different methods for the test problem of size
N = 32. We run the new FGK method F-TV(p) with true pseudoinverse
computed directly, as well as the new F-TV method, wherein the alternative pseudoinverse
is used in lieu of
at each iteration of the flexible framework. We also consider FBTV, with a regularization parameter
and optimal step-size
. The graphs of the RREs versus iteration number are shown in
Figure 2 (left frame). For this test problem, the solvers are run for 300 iterations and we can clearly see that each of the F-TV, F-TV(p), and LSQR-L methods terminate early due to the stopping criterion (
31). The RREs in
Figure 2 show that both F-TV and F-TV(p) follow very similar error histories, and terminate close to one another at iterations 48 and 52, respectively (highlighted by diamond markers), with an RRE around 0.25. This behavior provides experimental evidence supporting the use of the approximate pseudoinvese
in the following test problems. FBTV sees steady improvement of the RRE over all iterations, and achieves an RRE similar to F-TV at iteration 150. Plots of the regularization parameter automatically selected when solving the projected problem are provided in the right-hand frame of
Figure 2. We see that no Tikhonov regularization is enforced in the projected problem (
23) until iteration 46; however, since the projected problem (
23) is associated with the standard-form transformed problem (
13), even if
, the regularization matrix
affects the transformed coefficient matrix
, thus influencing the solutions
at the
kth iteration. Although not shown in the following, the adaptively chosen regularization parameter exhibits a behavior similar to the one displayed in
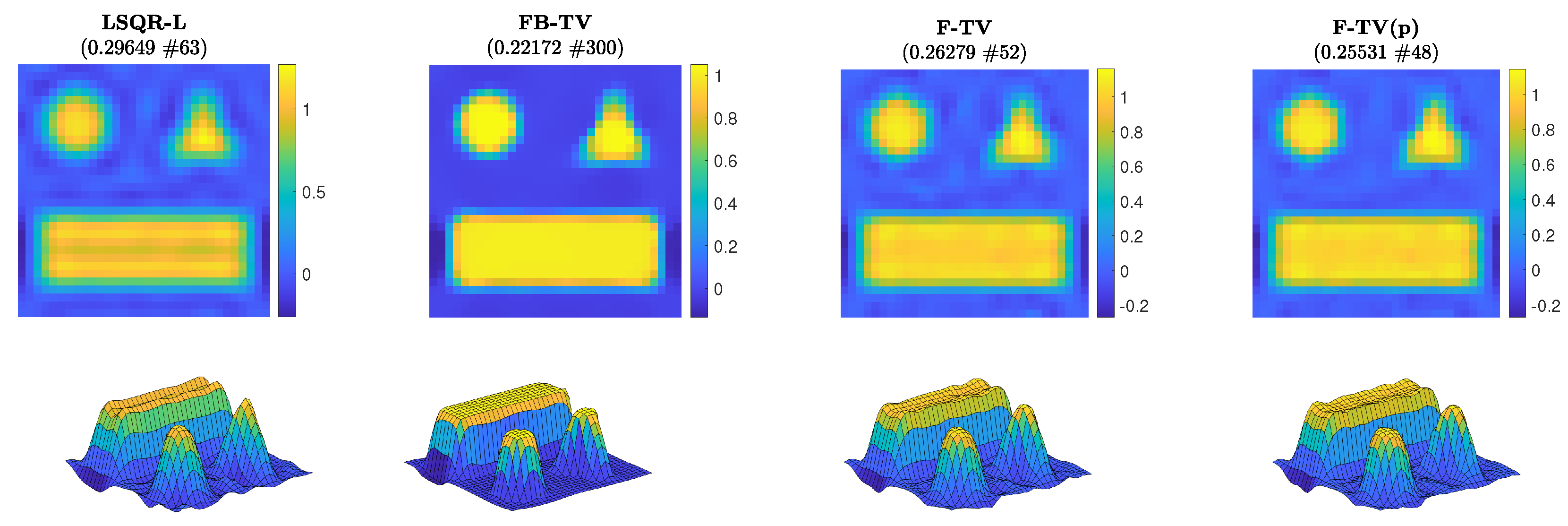
Figure 2, i.e., it is initially zero and then quickly stabilizes around a suitable value. The reconstructions achieved when the stopping criterion is satisfied are displayed in
Figure 3; corresponding surface plots are also displayed to better indicate their ideally piecewise-constant features. The iteration number and associated RRE are also reported. Since the geometric pattern test image is piecewise constant, total variation is a suitable choice of regularizer as it promotes such a property in the reconstructions. Indeed, the reconstructions computed by FBTV, F-TV, and F-TV(p) reproduce such features, whereas LSQR-L, which uses a fixed regularization matrix
, does not (e.g., it yields a reconstruction that has a distinct valley in the rectangular shape). The reconstruction from FBTV has the smallest RRE out of the presented reconstructions. However, we see in
Figure 2 that, while the RREs of both F-TV and F-TV(p) temporarily stagnate after the stopping criterion is satisfied, they then continue to decrease to levels comparable with that of the presented FBTV reconstruction.
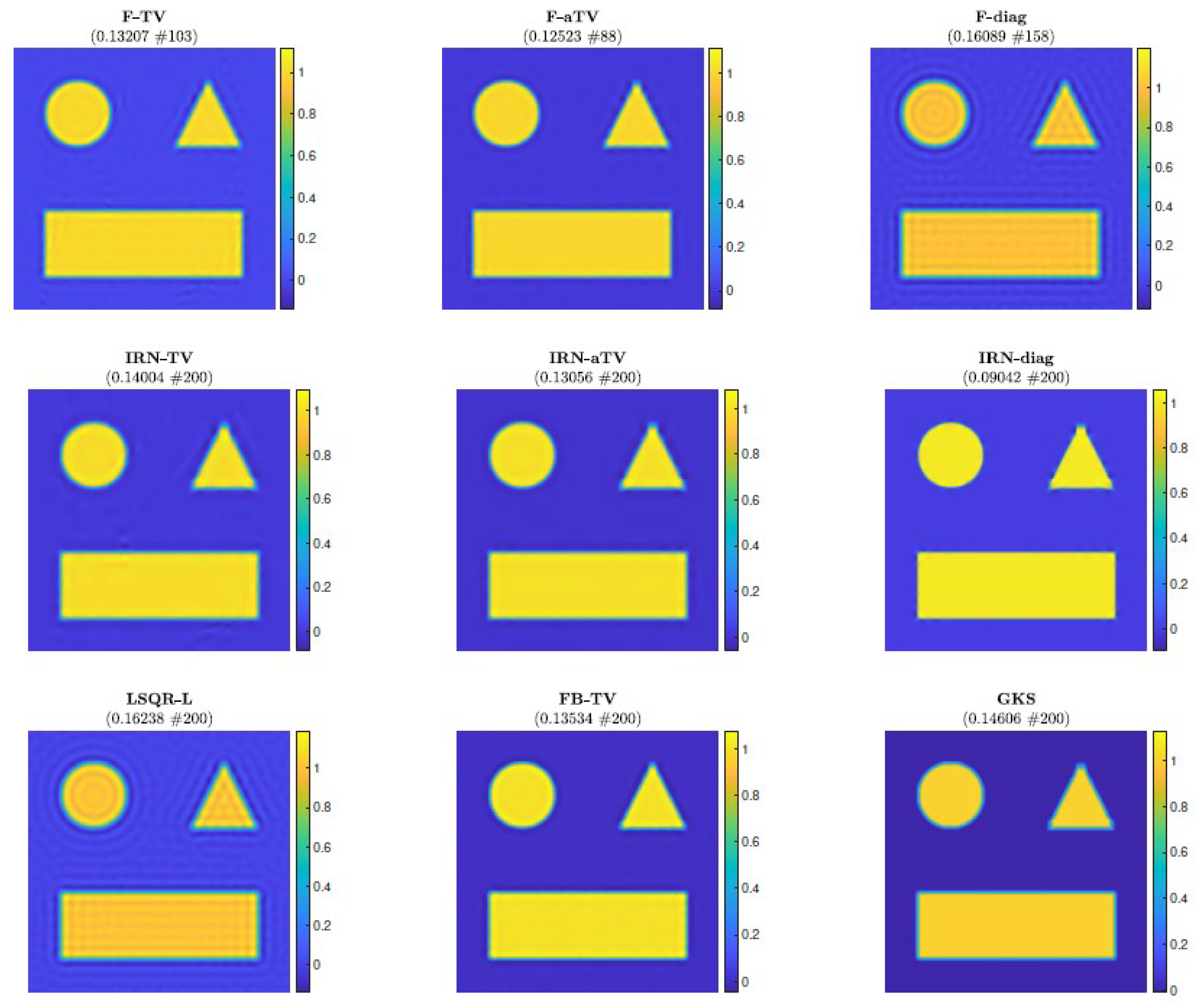
Next, we consider the test problem of size
N = 256; in this setting (as well as for all the other experiments), it is no longer feasible to compute
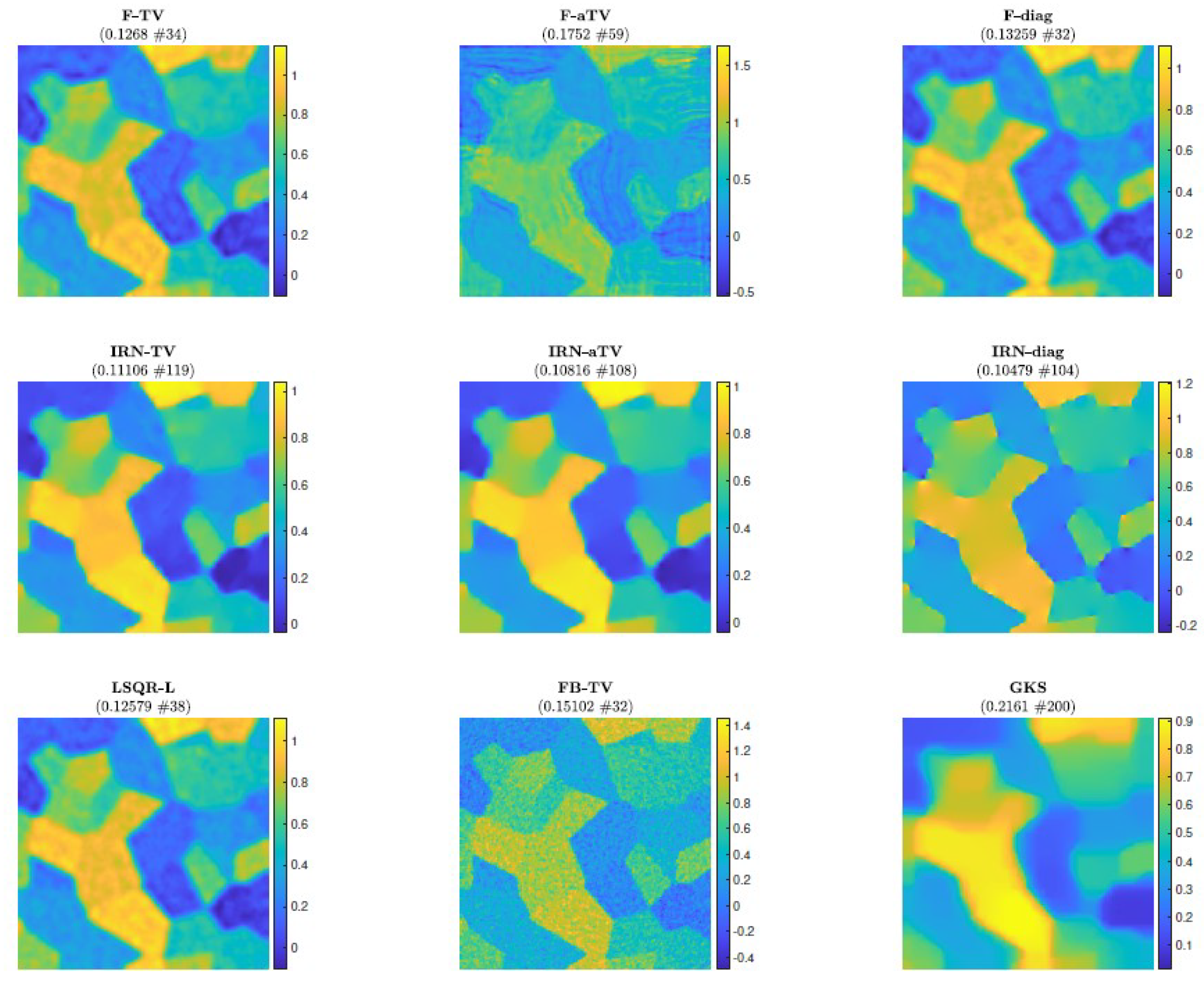
.
Figure 4 shows the reconstructions computed by the FKS-based methods and LSQR-L at the stopping iteration, the IRN methods at the final iteration, and the FBTV and GKS methods at the iteration with the lowest RRE. We can see that both the IRN and GKS methods struggle to distinguish the corners of geometrical objects, which appear flat and truncated. GKS performs exceptionally well in recovering the correct pixel intensity scale, whereas the IRN-diag reconstruction has some pixels with intensities as low as
and as high as
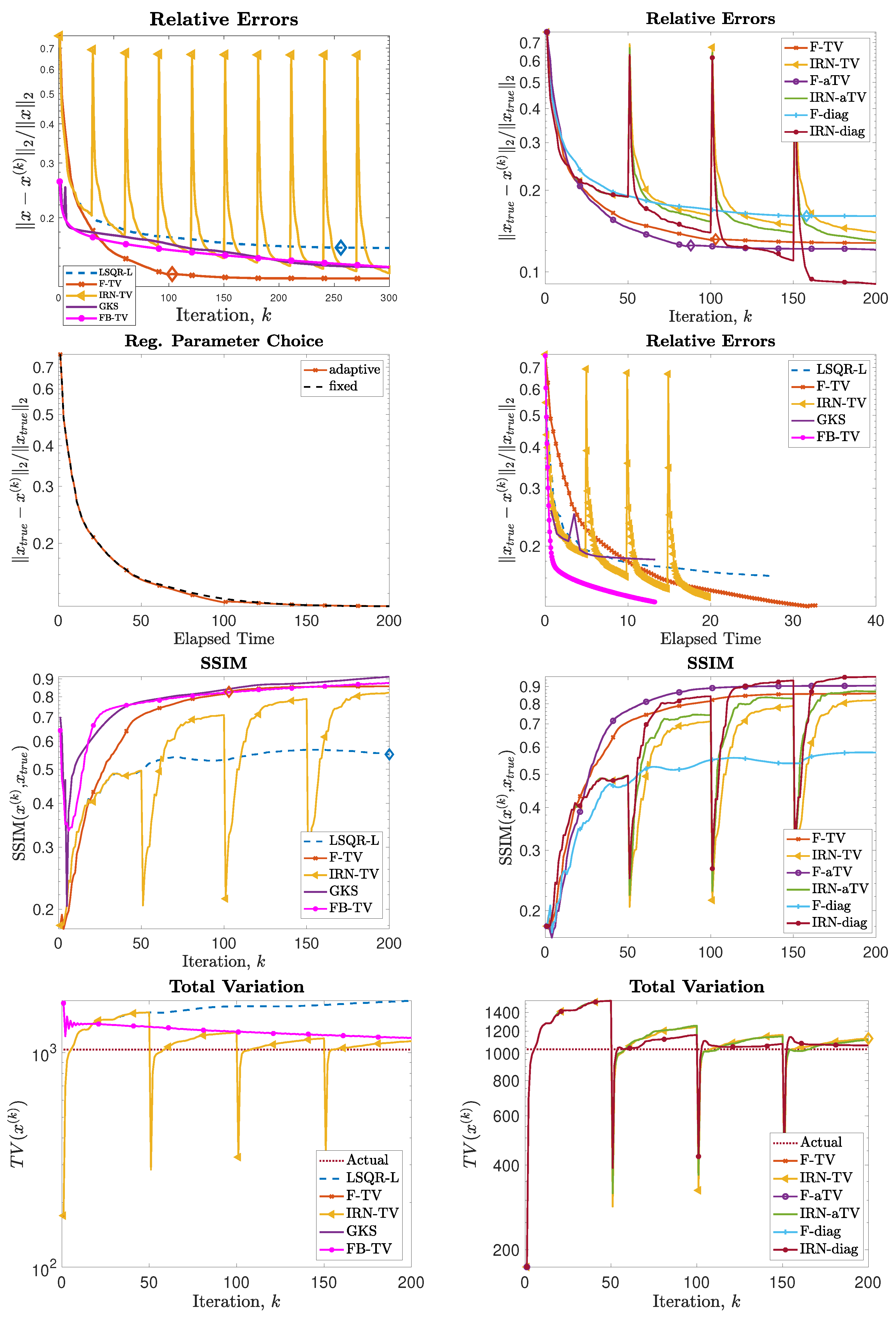
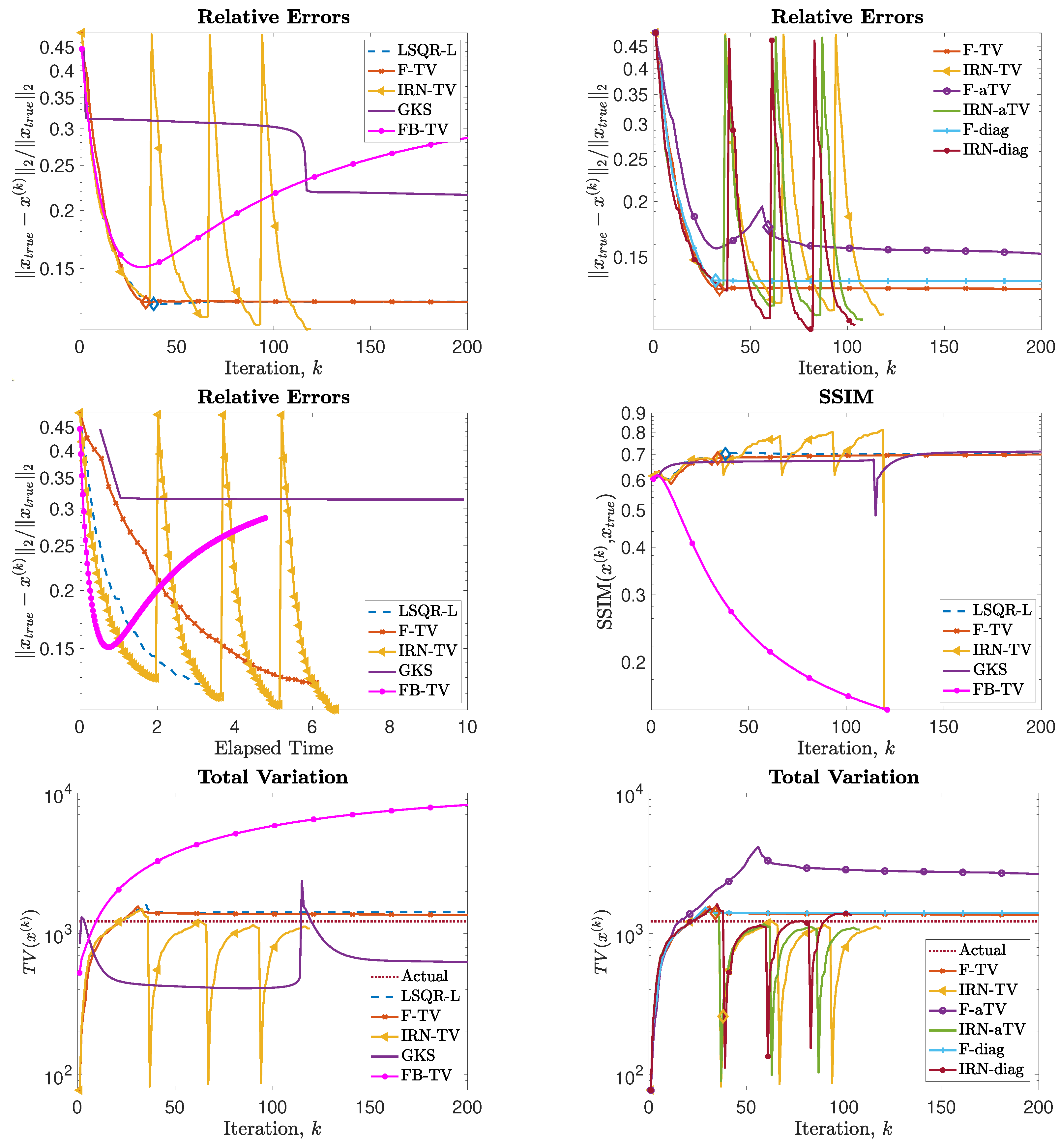
, due to spurious oscillations around the edges of the imaged objects. The reconstruction by LSQR-L has many ringing artifacts, which are removed when more sophisticated regularizers, such as isotropic total variation, are utilized. The values of the relative errors versus number of iterations for all the considered methods are plotted in
Figure 5, in the upper frames. In both frames, we can clearly see that the IRN methods are affected by periodic sudden jumps in the RRE values: this is due to the fact that, in accordance with common practice (see, e.g., [
40]), the IRN methods are implemented with ‘cold’ restarts, i.e.,
at the beginning of each iteration cycle. The frame in position (2,2) also displays the progress of the relative errors versus computational time (as measured by MATLAB’s
tic toc command) for a few selected methods, where both F-TV and LSQR-L are run till the stopping criterion is statisfied and all the other solvers run for 200 iterations. We can clearly see that the running time of the new F-TV methods exceeds the running times of FISTA and GKS by approximately 20 s, and the running time of IRN-TV by approximately 10 s. However, the new F-TV method also achieves a lower RRE and it is likely that, if FISTA, GKS, and IRN-TV are run for more iterations, they will reach the same RRE, taking additional computational time. Moreover, according to the standard practice, FISTA may be run several times for different values of the regularization parameter
before finding an appropriate one: for this numerical experiment, running FISTA for three different values of
would be enough to exceed the F-TV computational time. The quality of the computed solutions versus the number of iterations is also displayed in the frames in the third row of
Figure 5, where the SSIM is used as a quality measure. According to this metric, the reconstructions computed by F-TV, GKS, and FBTV have similar high quality, which agrees with the pictures displayed in
Figure 4. As already remarked in the previous sections, one advantage of the new FGK-based solvers is that the regularization parameter
can be adaptively and heuristically chosen at each iteration: the frame in position (2,1) of
Figure 5 displays the behavior of the F-TV RRE with iteration-dependent regularization parameter
,
, set according to the discrepancy principle (
30), and fixed regularization parameter
. We can clearly see that the two approaches are almost identical, providing experimental validation for the adaptive regularization parameter choice. Although not reported, such behavior is common to F-TV and F-aTV and it is observed in all the performed numerical experiments. The history of the total variation of the reconstructions is plotted in the bottom row of
Figure 5, where the total variation of the ground truth image is also included. Excluding those of IRN-diag, F-diag, and LSQR-L, the total variation of the reconstructions stabilizes at a level adherent to that of the ground truth, with the IRN-aTV, IRN-TV, and GKS reconstructions performing particularly well.
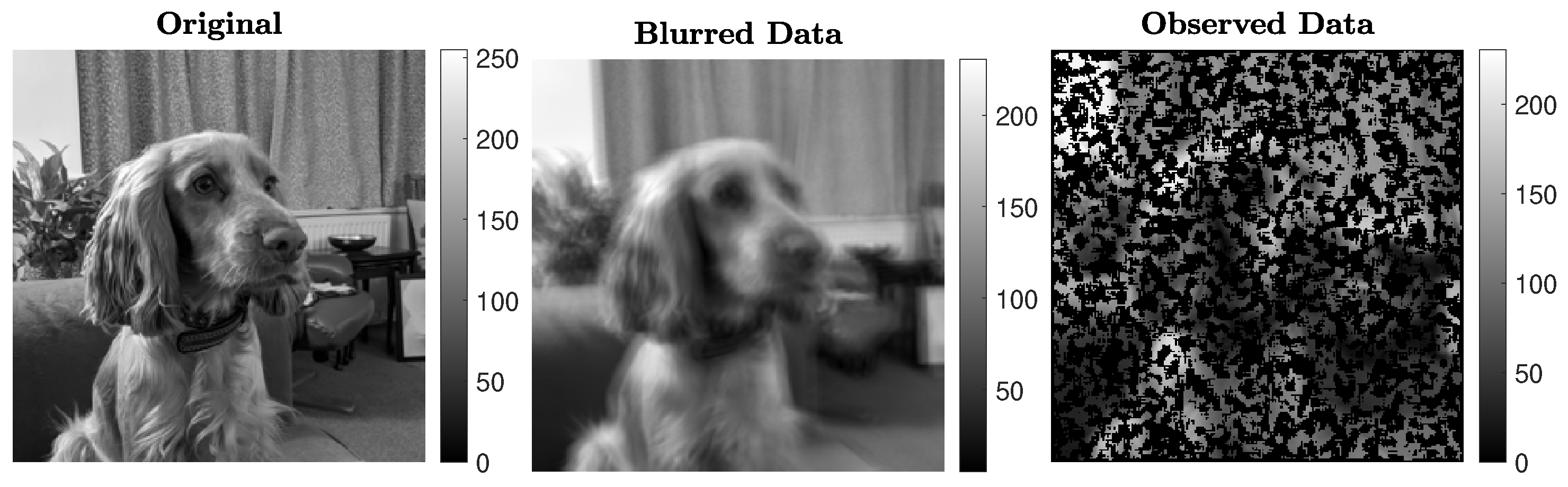
5.2. Experiment 2—Image Inpainting and Deblurring
In this experiment, we consider restoring a
pixel image of high total variation that has been corrupted by both blur (associated with a known blurring operator
) and undersampling (associated with a known operator
S), in this order. The uncorrupted test image, blurred data, and undersampled data are shown in
Figure 6. The blurring operator
is generated using the following IR Tools function:
which models random shaking blur of mild intensity. Here, the
’CommitCrime’ option relates to whether the reflexible boundary conditions, imposed by the blurring operator, should be regarded as how the exact data precisely behave outside the frame of reference; see [
39] for details. The known undersampling operator
S picks clusters of pixels at random: approximately
of the pixels are retained. The forward operator associated with this test problem is therefore
, of size
. Gaussian white noise
e of relative noise level
is added to the data.
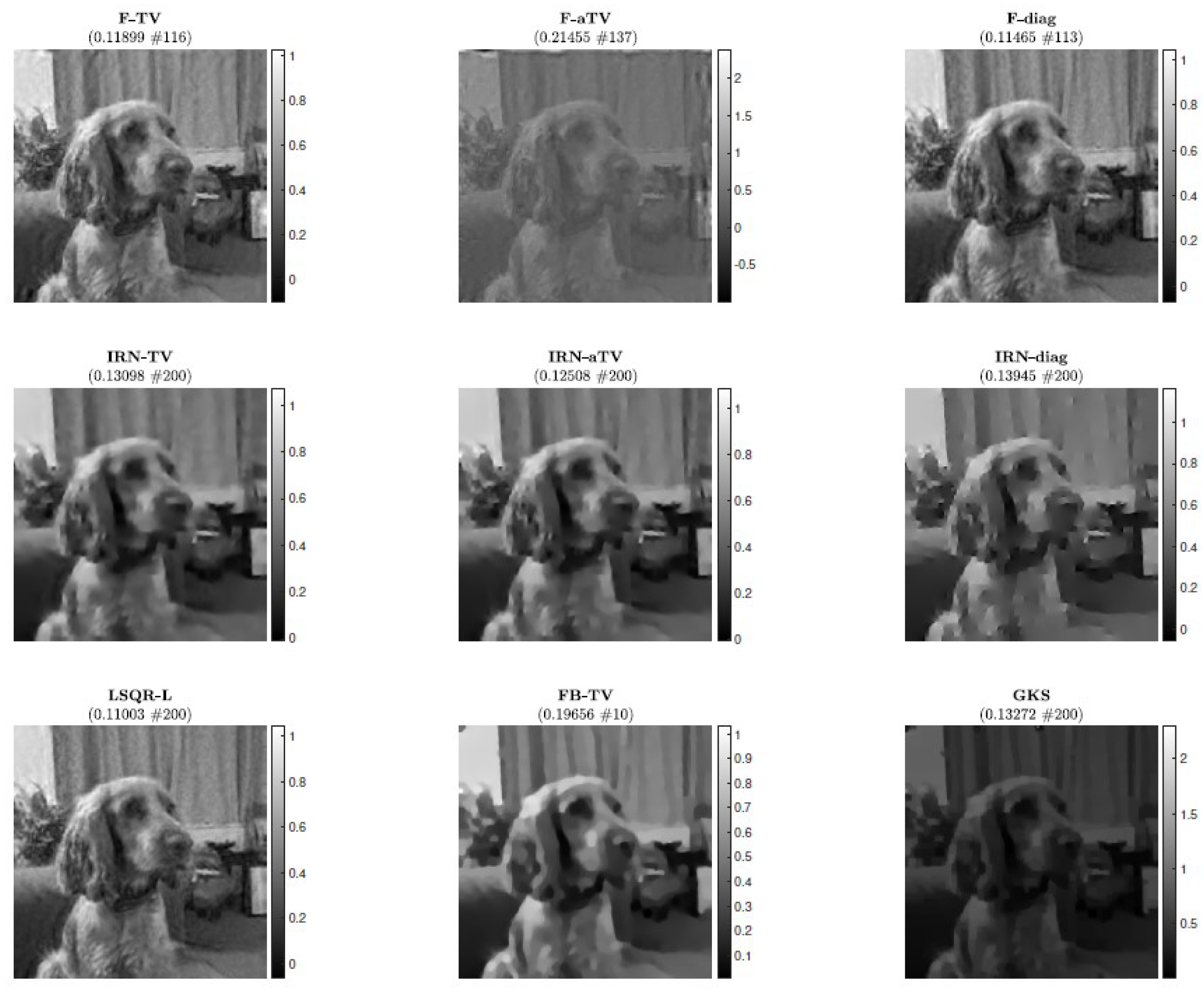
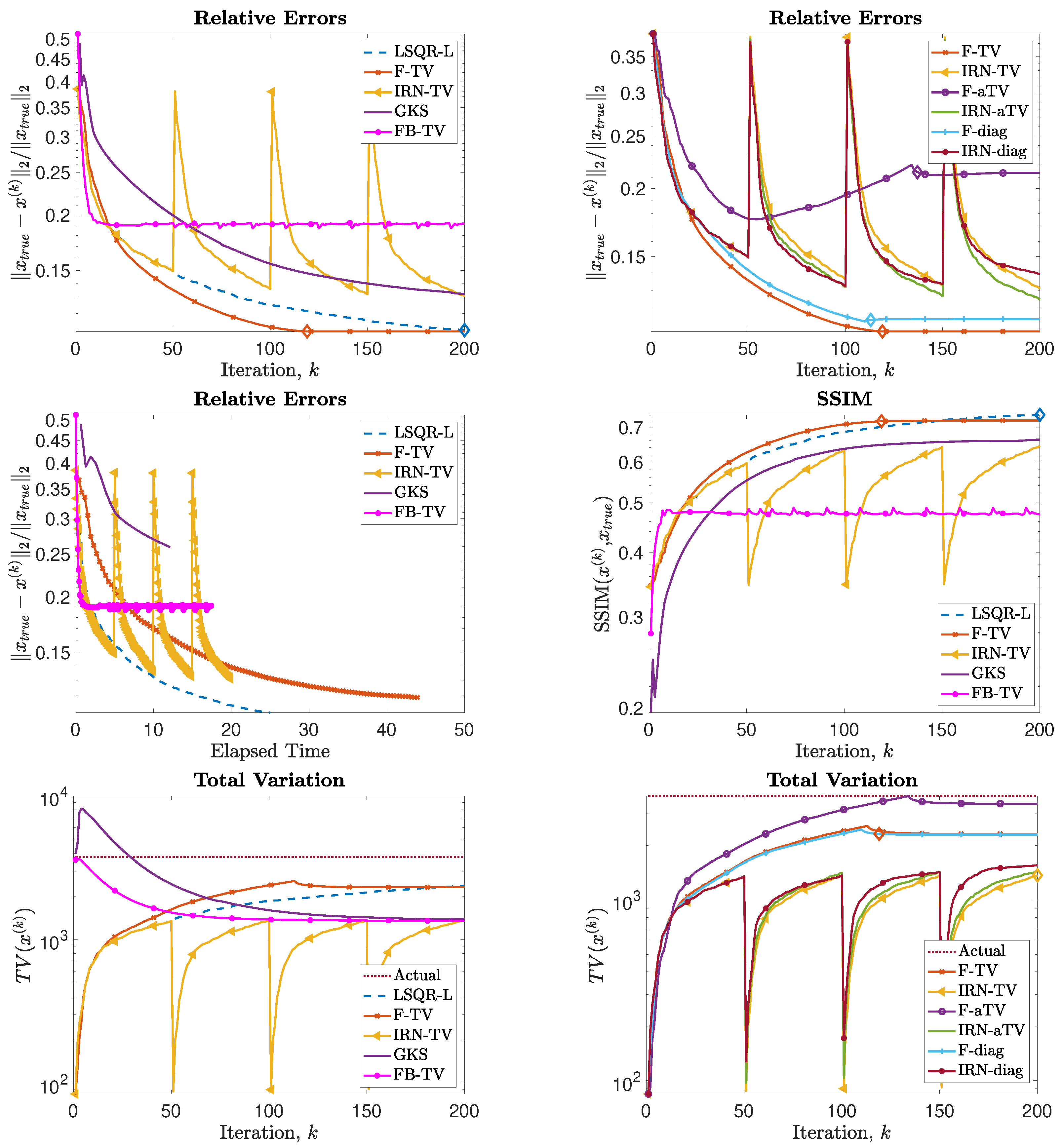
Figure 7 displays the reconstructions obtained by the considered methods, with a similar format to
Figure 4. We can see that the IRN methods yield reconstructions that are more blocky and piecewise than the F-TV and the F-diag methods. LSQR-L performs well for this problem, with a reconstruction similar to those obtained by both F-TV and F-diag. This may in part be due to the original picture having piecewise constant features along with smoothly and rapidly varying features, so that penalization of the TV norm may not be as competitive an option as simply penalizing the (not necessarily sparse) gradients. We remark that it takes LSQR-L almost twice as many iterations as F-TV and F-diag to terminate via the stopping criterion (
31), despite the three methods having similar RRE histories (this is visible in
Figure 8). FBTV (with
,
) attains a reconstruction of quality similar to those of IRN-TV and IRN-aTV. Both F-aTV and GKS perform poorly for this problem, with some pixels in the respective reconstruction dominating the scaling of the image and far exceeding the true pixel value range. Along with the RRE history,
Figure 8 displays the SSIM history, the values of the RREs versus the elapsed computational time, and the values of the total variation of the reconstructions at each iteration.
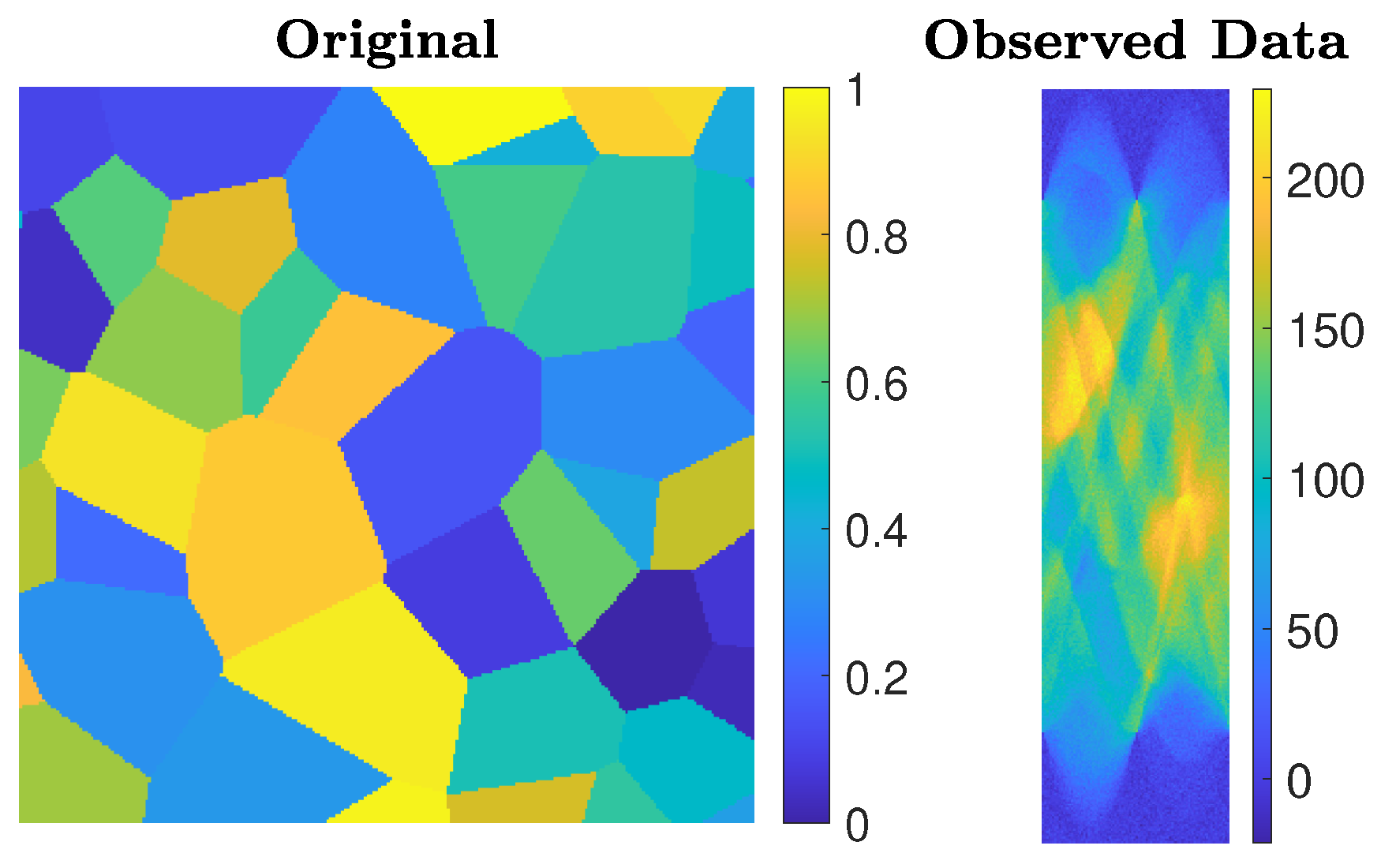
5.3. Experiment 3—Computed Tomography
We consider an undersampled computed tomography test problem, with a ground truth image (phantom) of size
pixels, based on random Voronoi cells and simulating grains in a crystalline material. The forward operator represents a 2D equidistant parallel X-ray beam geometry, with data taken from angles 0 to 179 degrees in increments of 2, leading to an underdetermined matrix
A of size
. The data (sinogram) are corrupted by Gaussian white noise of level
. Such a test problem can be generated from IR Tools with the following instructions:
The phantom and sinogram for this test problem are displayed in
Figure 9. The top row of
Figure 10 displays the history of RREs of the considered methods, in which not only do IRN-based methods achieve the lowest RREs, but they also terminate inner loops early—leading to around half as many overall iterations being performed. FBTV (with fixed
,
), F-TV, and LSQR-L have similar RRE histories for the first 30 iterations; however, FBTV exhibits semi-convergent properties whereas LSQR-L and F-TV stabilize due to the automatically selected regularization parameter. The GKS method exhibits inconsistent improvement of RRE between iterations, and settles at an RRE larger than the FKS and the IRN ones. The smallest RRE out of all the considered methods is achieved by IRN-diag on the third outer loop. Subsequent outer loops of IRN-diag, however, lead to an increase in RRE—an issue that could be remedied, should a stopping criterion for the outer iterations be imposed. The F-aTV method yields a poor reconstruction of the phantom, with lots of artifacts and incorrect scaling of the pixel intensities. Excluding FBTV and F-aTV, all the methods realize, on their final iteration, a reconstruction that has total variation similar to that of the true phantom’s (as can be seen in the bottom row of
Figure 10).
The reconstructions achieved when the stopping criterion is satisfied are displayed in
Figure 11.
All the experiments considered in this section show that the new FGK-based solvers are indeed competitive with other popular edge-enhancing solvers: in particular, they achieve results of similar or improved quality with an increased speedup when it comes to the number of performed iterations. In all the examples, the reconstructions recover the edges and piecewise constant features of the exact images; the iteration-dependent weights are also able to recover rapidly changing and smooth features whenever they are present. The quality of the reconstructed solutions depends on the considered regularization terms and weightings, too: the performance of TV, aTV, and the edge-enhancing weights is obviously not the same across the considered test problems, but there is at least one such regularizer that, when considered within the FGK-based solver, delivers excellent results. For all these methods, the regularization parameters and stopping iteration are adaptively selected, leading to reliable parameter-free solvers.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}