Origami Lesion-Targeting Device for CT-Guided Interventions


Abstract
1. Introduction
2. Materials and Methods
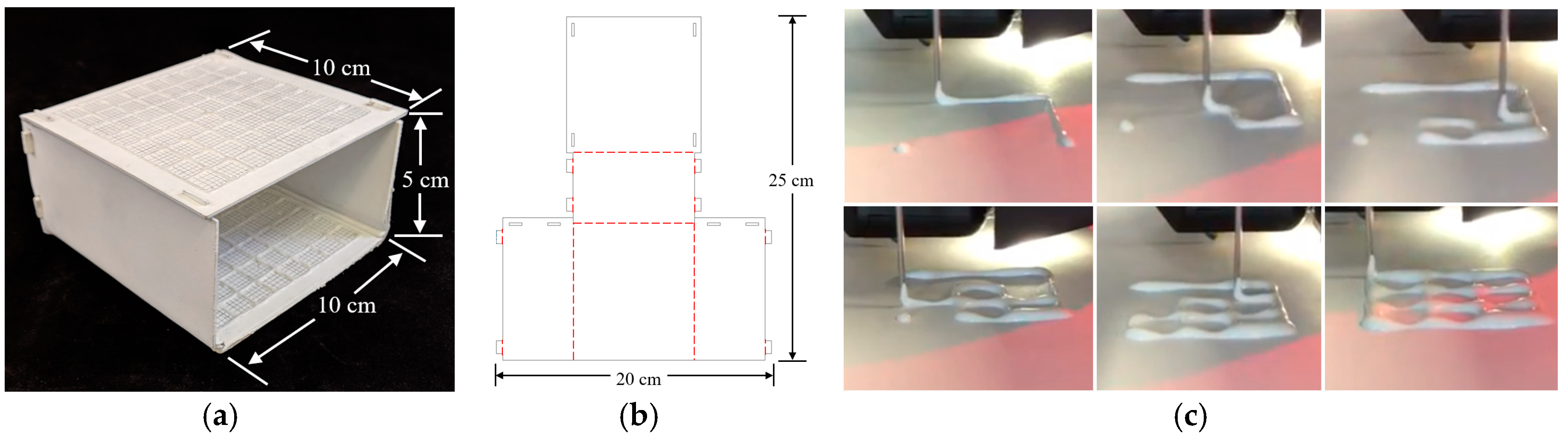
2.1. Origami Lesion Targeting Device Design
- Disposable or able to be sterilized for future use
- Attached securely to patient
- Allow for in-plane or out-of-plane needle insertions
- Support the insertion of multiple needles
- The device should not require additional software
2.2. Radiocontrast Agent Mixture
2.3. 3D Printing Radiocontrast Agent
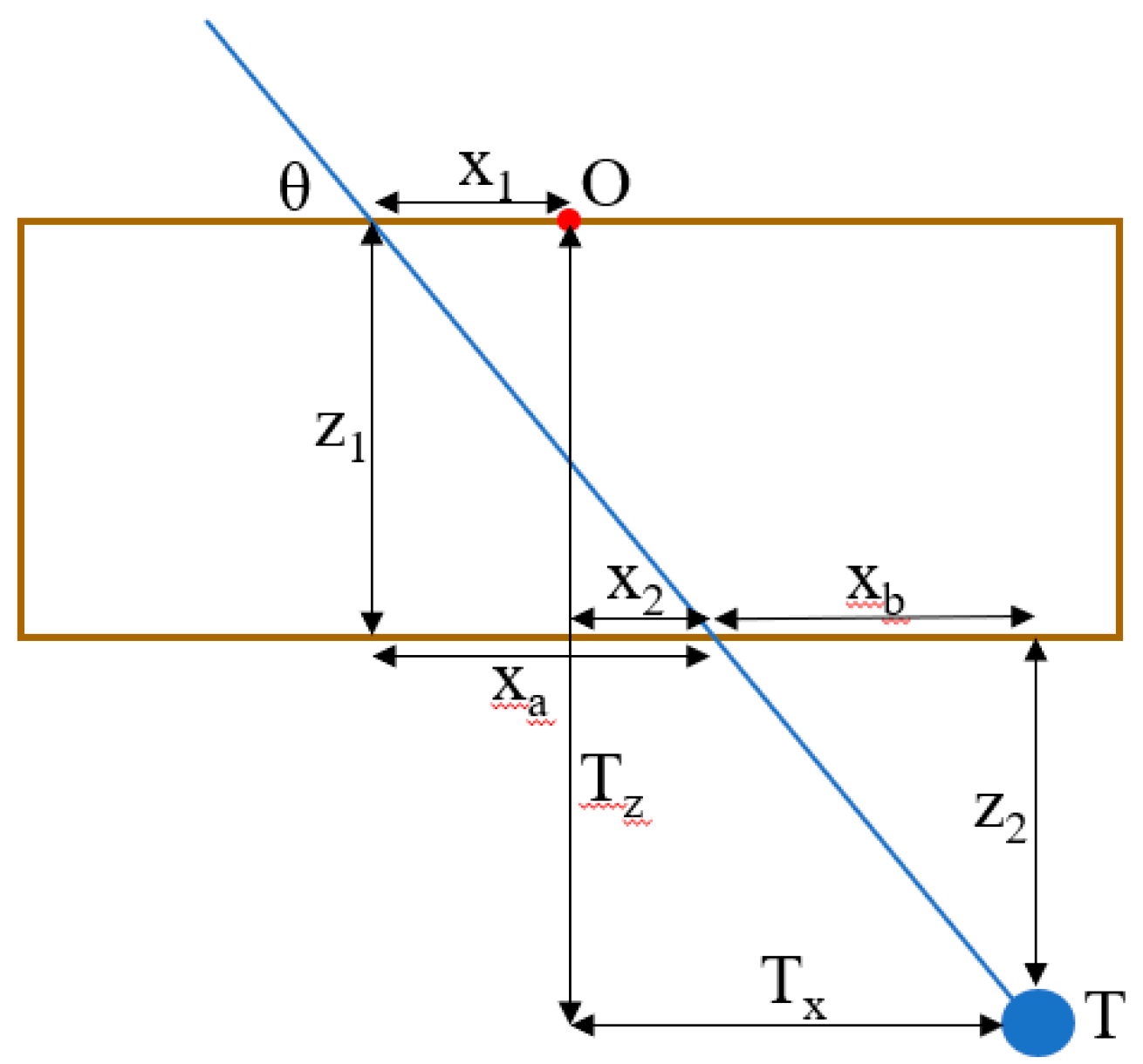
2.4. Lesion Targeting Equations
2.5. Workflow
- Perform a diagnostic CT or ultrasound scan of the target area to locate the target lesion to determine positioning of the patient and the approximate skin entry point or region.
- Place the needle guide on the patient and perform another CT scan to visualize the location of the target lesion with respect to the needle guide.
- Measure the approximate transverse, axial, and sagittal distances from the origin of the needle guide to the target lesion on the CT console or workstation.
- Use the needle insertion location Equations (1)–(6) to determine the insertion locations and the insertion depth. (This step may be semi-automated)
- Insert the needle into the calculated locations of the needle guide by measuring the distance from the origin using the 1 cm spacing between the gridlines, stopping insertion just after traversing the skin.
- Perform another CT scan in the same respiratory cycle to confirm the needle is aligned with the target lesion. If yes, continue to step 7. If no, repeat steps 3–6.
- Continue pushing the needle for the entire calculated insertion depth to contact the target lesion.
- Perform another CT scan to confirm the target lesion is on track to be sampled (depending upon forward throw gun versus one snap gun). If yes, collect the sample and remove the needle from the patient. If no, retract the needle and repeat steps 6 & 7.
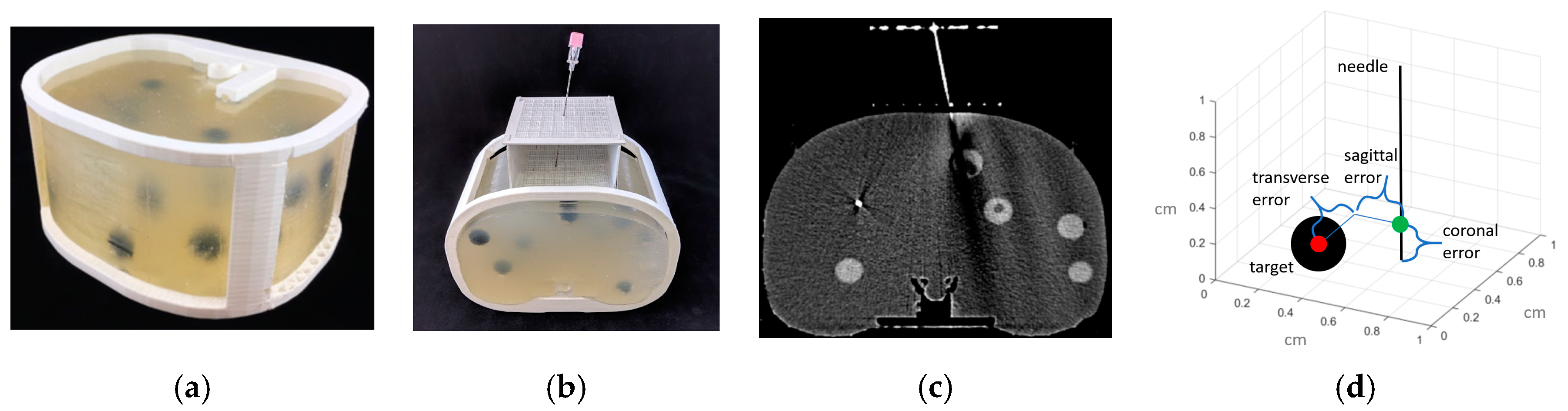
2.6. Validation of Targeting Accuracy
3. Results
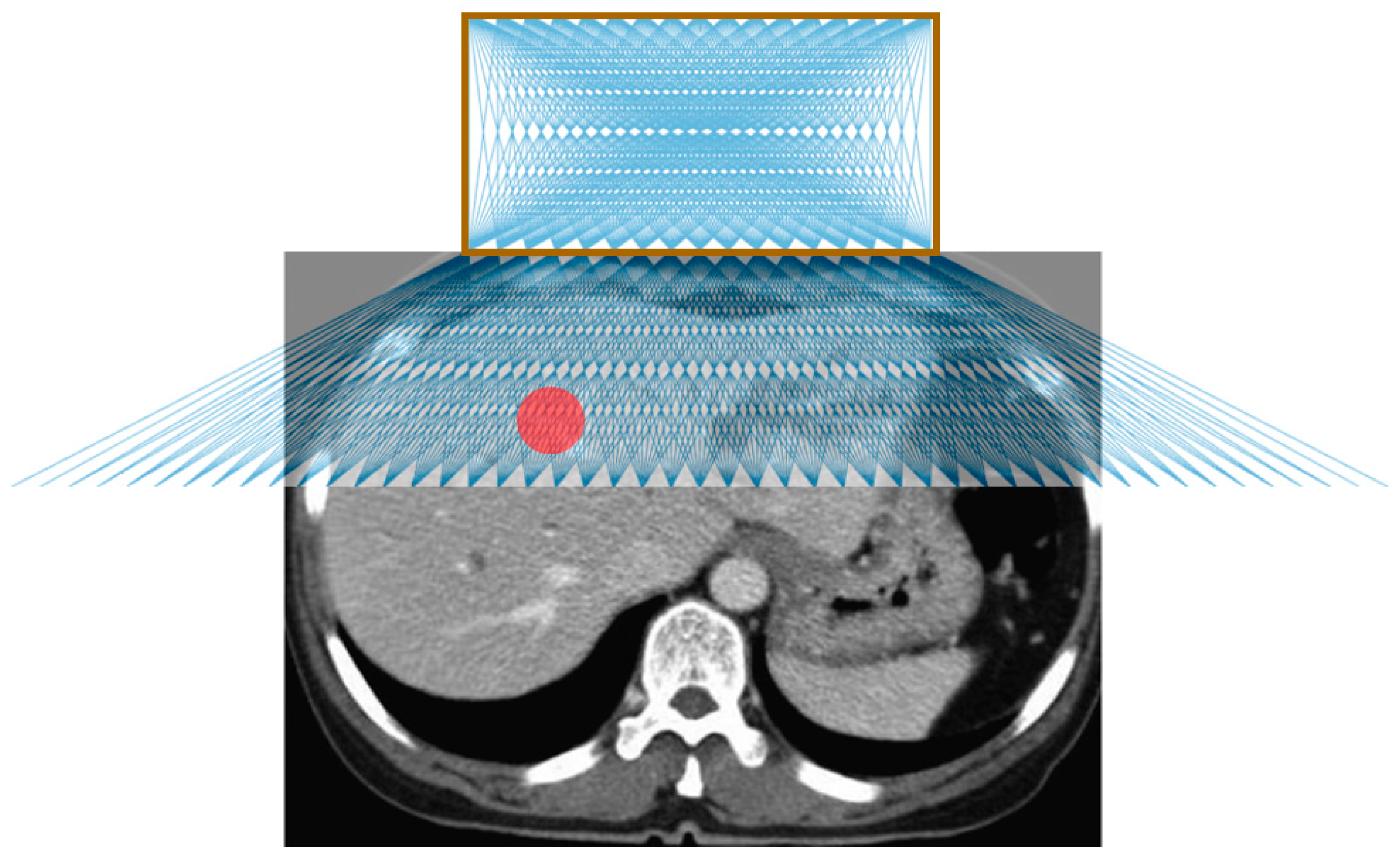
3.1. Workspace Analysis
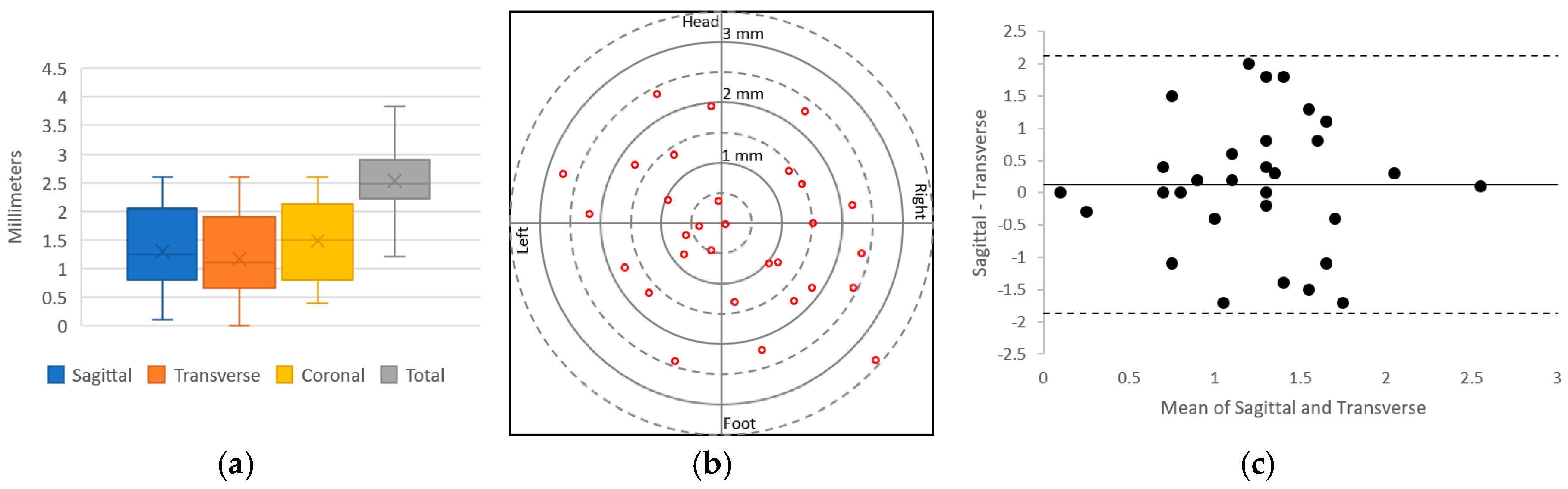
3.2. Phantom Study
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Katada, K.; Kato, R.; Anno, H.; Ogura, Y.; Koga, S.; Ida, Y.; Sato, M.; Nonomura, K. Guidance with real-time CT fluoroscopy: Early clinical experience. Radiology 1996, 200, 851–856. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Boiselle, P.M.; Shepard, J.; Trotman-Dickenson, B.; McLoud, T. Diagnostic accuracy and safety of CT-guided percutaneous needle aspiration biopsy of the lung: Comparison of small and large pulmonary nodules. AJR Am. J. Roentgenol. 1996, 167, 105–109. [Google Scholar] [CrossRef] [PubMed]
- Leffler, S.G.; Chew, F.S. CT-guided percutaneous biopsy of sclerotic bone lesions: Diagnostic yield and accuracy. AJR Am. J. Roentgenol. 1999, 172, 1389–1392. [Google Scholar] [CrossRef] [PubMed]
- Goldberg, S.N.; Keogan, M.T.; Raptopoulos, V. Percutaneous CT-guided biopsy: Improved confirmation of sampling site and needle positioning using a multistep technique at CT fluoroscopy. J. Comput. Assist. Tomogr. 2000, 24, 264–266. [Google Scholar] [CrossRef] [PubMed]
- VanSonnenberg, E.; Casola, G.; Ho, M.; Neff, C.; Varney, R.; Wittich, G.; Christensen, R.; Friedman, P. Difficult thoracic lesions: CT-guided biopsy experience in 150 cases. Radiology 1988, 167, 457–461. [Google Scholar] [CrossRef]
- Mody, M.K.; Kazerooni, E.A.; Korobkin, M. Percutaneous CT-guided biopsy of adrenal masses: Immediate and delayed complications. J. Comput. Assist. Tomogr. 1995, 19, 434–439. [Google Scholar] [CrossRef]
- Wu, C.C.; Maher, M.M.; Shepard, J.-A.O. Complications of CT-guided percutaneous needle biopsy of the chest: Prevention and management. Am. J. Roentgenol. 2011, 196, W678–W682. [Google Scholar] [CrossRef]
- Loubeyre, P.; Copercini, M.; Dietrich, P.-Y. Percutaneous CT-guided multisampling core needle biopsy of thoracic lesions. Am. J. Roentgenol. 2005, 185, 1294–1298. [Google Scholar] [CrossRef]
- Bernardino, M.; Walther, M.; Phillips, V.; Graham, S., Jr.; Sewell, C.; Gedgaudas-McClees, K.; Baumgartner, B.; Torres, W.; Erwin, B. CT-guided adrenal biopsy: Accuracy, safety, and indications. Am. J. Roentgenol. 1985, 144, 67–69. [Google Scholar] [CrossRef]
- Olscamp, A.; Rollins, J.; Tao, S.S.; Ebraheim, N.A. Complications of CT-guided biopsy of the spine and sacrum. Orthopedics 1997, 20, 1149–1152. [Google Scholar]
- Brabrand, K.; Aaløkken, T.; Krombach, G.; Günther, R.; Tariq, R.; Magnusson, A.; Lindgren, P.G. Multicenter evaluation of a new laser guidance system for computed tomography intervention. Acta Radiol. 2004, 45, 308–312. [Google Scholar] [CrossRef]
- Jacobi, V.; Thalhammer, A.; Kirchner, J. Value of a laser guidance system for CT interventions: A phantom study. Eur. Radiol. 1999, 9, 137–140. [Google Scholar] [CrossRef] [PubMed]
- Varro, Z.; Locklin, J.K.; Wood, B.J. Laser navigation for radiofrequency ablation. Cardiovasc. Interv. Radiol. 2004, 27, 512–515. [Google Scholar] [CrossRef] [PubMed]
- Magnusson, A.; Radecka, E.; Lönnemark, M.; Raland, H. Computed-tomography-guided punctures using a new guidance device. Acta Radiol. 2005, 46, 505–509. [Google Scholar] [CrossRef] [PubMed]
- Roberts, C.; Morrison, W.; Deely, D.; Zoga, A.; Koulouris, G.; Winalski, C. Use of a novel percutaneous biopsy localization device: Initial musculoskeletal experience. Skelet. Radiol. 2007, 36, 53–57. [Google Scholar] [CrossRef]
- Henderson, J.M.; Holloway, K.L.; Gaede, S.E.; Rosenow, J.M. The application accuracy of a skull-mounted trajectory guide system for image-guided functional neurosurgery. Comput. Aided Surg. 2004, 9, 155–160. [Google Scholar] [CrossRef] [PubMed]
- Appelbaum, L.; Sosna, J.; Nissenbaum, Y.; Benshtein, A.; Goldberg, S.N. Electromagnetic navigation system for CT-guided biopsy of small lesions. Am. J. Roentgenol. 2011, 196, 1194–1200. [Google Scholar] [CrossRef] [PubMed]
- Martens, V.; Schlichting, S.; Besirevic, A.; Kleemann, M. LapAssistent—A laparoscopic liver surgery assistance system. In 4th European Conference of the International Federation for Medical and Biological Engineering; Springer: Berlin/Heidelberg, Germany, 2009; pp. 121–125. [Google Scholar]
- Zhang, H.; Banovac, F.; Lin, R.; Glossop, N.; Wood, B.J.; Lindisch, D.; Levy, E.; Cleary, K. Electromagnetic tracking for abdominal interventions in computer aided surgery. Comput. Aided Surg. 2006, 11, 127–136. [Google Scholar] [CrossRef]
- Banovac, F.; Tang, J.; Xu, S.; Lindisch, D.; Chung, H.Y.; Levy, E.B.; Chang, T.; McCullough, M.F.; Yaniv, Z.; Wood, B.J. Precision targeting of liver lesions using a novel electromagnetic navigation device in physiologic phantom and swine. Med. Phys. 2005, 32, 2698–2705. [Google Scholar] [CrossRef]
- Cleary, K.; Zhang, H.; Glossop, N.; Levy, E.; Wood, B.; Banovac, F. Electromagnetic tracking for image-guided abdominal procedures: Overall system and technical issues. In Proceedings of the 2005 IEEE Engineering in Medicine and Biology 27th Annual Conference, Shanghai, China, 17–18 January 2005; pp. 6748–6753. [Google Scholar]
- Wood, B.J.; Zhang, H.; Durrani, A.; Glossop, N.; Ranjan, S.; Lindisch, D.; Levy, E.; Banovac, F.; Borgert, J.; Krueger, S. Navigation with electromagnetic tracking for interventional radiology procedures: A feasibility study. J. Vasc. Interv. Radiol. 2005, 16, 493–505. [Google Scholar] [CrossRef]
- Grand, D.J.; Atalay, M.A.; Cronan, J.J.; Mayo-Smith, W.W.; Dupuy, D.E. CT-guided percutaneous lung biopsy: Comparison of conventional CT fluoroscopy to CT fluoroscopy with electromagnetic navigation system in 60 consecutive patients. Eur. J. Radiol. 2011, 79, e133–e136. [Google Scholar] [CrossRef] [PubMed]
- Meyer, B.C.; Peter, O.; Nagel, M.; Hoheisel, M.; Frericks, B.B.; Wolf, K.-J.; Wacker, F.K. Electromagnetic field-based navigation for percutaneous punctures on C-arm CT: Experimental evaluation and clinical application. Eur. Radiol. 2008, 18, 2855. [Google Scholar] [CrossRef]
- Narsule, C.K.; Sales Dos Santos, R.; Gupta, A.; Ebright, M.I.; Rivas, R., Jr.; Daly, B.D.; Fernando, H.C. The efficacy of electromagnetic navigation to assist with computed tomography-guided percutaneous thermal ablation of lung tumors. Innovations 2012, 7, 187–190. [Google Scholar]
- Penzkofer, T.; Bruners, P.; Isfort, P.; Schoth, F.; Günther, R.W.; Schmitz-Rode, T.; Mahnken, A.H. Free-hand CT-based electromagnetically guided interventions: Accuracy, efficiency and dose usage. Minim. Invasive Ther. Allied Technol. 2011, 20, 226–233. [Google Scholar] [CrossRef] [PubMed]
- Santos, R.S.; Gupta, A.; Ebright, M.I.; DeSimone, M.; Steiner, G.; Estrada, M.-J.; Daly, B.; Fernando, H.C. Electromagnetic navigation to aid radiofrequency ablation and biopsy of lung tumors. Ann. Thorac. Surg. 2010, 89, 265–268. [Google Scholar] [CrossRef] [PubMed]
- Maier-Hein, L.; Pianka, F.; Seitel, A.; Müller, S.A.; Tekbas, A.; Seitel, M.; Wolf, I.; Schmied, B.M.; Meinzer, H.-P. Precision targeting of liver lesions with a needle-based soft tissue navigation system. In International Conference on Medical Image Computing and Computer-Assisted Intervention; Springer: Berlin/Heidelberg, Germany, 2007; pp. 42–49. [Google Scholar]
- Bale, R.; Vogele, M.; Lang, T.; Kovacs, P.; Rieger, M.; Freund, M.; Chemelli, A.; Rachbauer, F.; Hoser, C.; Fink, C. A novel vacuum immobilization device and a novel targeting device for computer assisted interventional procedures. In CARS 2002 Computer Assisted Radiology and Surgery; Springer: Berlin/Heidelberg, Germany, 2002; pp. 92–97. [Google Scholar]
- Glossop, N.D. Advantages of optical compared with electromagnetic tracking. JBJS 2009, 91, 23–28. [Google Scholar] [CrossRef]
- Tovar-Arriaga, S.; Tita, R.; Pedraza-Ortega, J.C.; Gorrostieta, E.; Kalender, W.A. Development of a robotic FD-CT-guided navigation system for needle placement—Preliminary accuracy tests. Int. J. Med. Robot. Comput. Assist. Surg. 2011, 7, 225–236. [Google Scholar] [CrossRef]
- Pollock, R.; Mozer, P.; Guzzo, T.J.; Marx, J.; Matlaga, B.; Petrisor, D.; Vigaru, B.; Badaan, S.; Stoianovici, D.; Allaf, M.E. Prospects in percutaneous ablative targeting: Comparison of a computer-assisted navigation system and the AcuBot Robotic System. J. Endourol. 2010, 24, 1269–1272. [Google Scholar] [CrossRef]
- Kronreif, G.; Fürst, M.; Kettenbach, J.; Figl, M.; Hanel, R. Robotic guidance for percutaneous interventions. Adv. Robot. 2003, 17, 541–560. [Google Scholar] [CrossRef]
- Melzer, A.; Gutmann, B.; Lukoschek, A.; Mark, M.; Zylka, W.; Fischer, H. Experimental evaluation of an MRI compatible telerobotic system for CT MRI guided interventions. Suppl. Radiol. 2003, 226, 409. [Google Scholar]
- Zhou, Y.; Thiruvalluvan, K.; Krzeminski, L.; Moore, W.H.; Xu, Z.; Liang, Z. CT-guided robotic needle biopsy of lung nodules with respiratory motion–experimental system and preliminary test. Int. J. Med. Robot. Comput. Assist. Surg. 2013, 9, 317–330. [Google Scholar] [CrossRef] [PubMed]
- Abdullah, B.J.J.; Yeong, C.H.; Goh, K.L.; Yoong, B.K.; Ho, G.F.; Yim, C.C.W.; Kulkarni, A. Robot-assisted radiofrequency ablation of primary and secondary liver tumours: Early experience. Eur. Radiol. 2014, 24, 79–85. [Google Scholar] [CrossRef] [PubMed]
- Schulz, B.; Eichler, K.; Siebenhandl, P.; Gruber-Rouh, T.; Czerny, C.; Vogl, T.J.; Zangos, S. Accuracy and speed of robotic assisted needle interventions using a modern cone beam computed tomography intervention suite: A phantom study. Eur. Radiol. 2013, 23, 198–204. [Google Scholar] [CrossRef] [PubMed]
- Groetz, S.; Wilhelm, K.; Willinek, W.; Pieper, C.; Schild, H.; Thomas, D. A new robotic assistance system for percutaneous CT-guided punctures: Initial experience. Minim. Invasive Ther. Allied Technol. 2016, 25, 79–85. [Google Scholar] [CrossRef] [PubMed]
- Kettenbach, J.; Kronreif, G. Robotic systems for percutaneous needle-guided interventions. Minim. Invasive Ther. Allied Technol. 2015, 24, 45–53. [Google Scholar] [CrossRef] [PubMed]
- Kettenbach, J.; Kara, L.; Toporek, G.; Fuerst, M.; Kronreif, G. A robotic needle-positioning and guidance system for CT-guided puncture: Ex vivo results. Minim. Invasive Ther. Allied Technol. 2014, 23, 271–278. [Google Scholar] [CrossRef] [PubMed]
- Megibow, A.J.; Bosniak, M.A. Dilute barium as a contrast agent for abdominal CT. Am. J. Roentgenol. 1980, 134, 1273–1274. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description |
|---|---|
| T | Target point; T = (Tx, Ty, Tz) |
| O | Origin of device |
| θ | Insertion angle |
| x1, x2 | Horizontal distance from origin to insertion locations |
| z1, z2 | Vertical distance from top layer to bottom layer, vertical distance from bottom layer to target |
| xa, xb | Horizontal distance from top layer insertion location to bottom layer insertion location, horizontal distance from bottom layer insertion location to target |
| d | Needle insertion depth |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Taylor, A.J.; Xu, S.; Wood, B.J.; Tse, Z.T.H. Origami Lesion-Targeting Device for CT-Guided Interventions. J. Imaging 2019, 5, 23. https://doi.org/10.3390/jimaging5020023
Taylor AJ, Xu S, Wood BJ, Tse ZTH. Origami Lesion-Targeting Device for CT-Guided Interventions. Journal of Imaging. 2019; 5(2):23. https://doi.org/10.3390/jimaging5020023
Chicago/Turabian StyleTaylor, Austin J., Sheng Xu, Bradford J. Wood, and Zion Tsz Ho Tse. 2019. "Origami Lesion-Targeting Device for CT-Guided Interventions" Journal of Imaging 5, no. 2: 23. https://doi.org/10.3390/jimaging5020023
APA StyleTaylor, A. J., Xu, S., Wood, B. J., & Tse, Z. T. H. (2019). Origami Lesion-Targeting Device for CT-Guided Interventions. Journal of Imaging, 5(2), 23. https://doi.org/10.3390/jimaging5020023