Shape Similarity Measurement for Known-Object Localization: A New Normalized Assessment


Abstract
:1. Introduction and Motivations
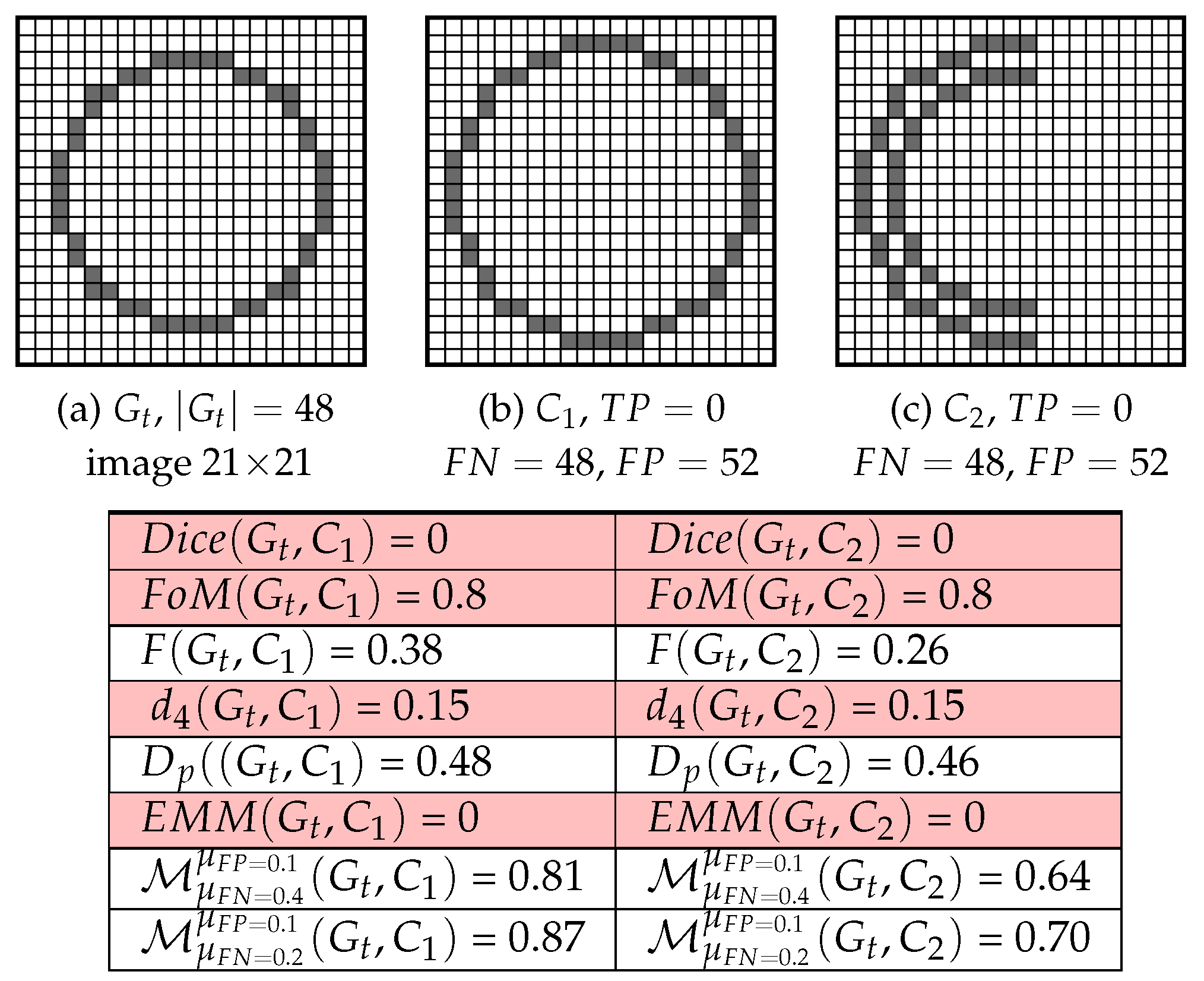
2. On Existing Normalized Measures
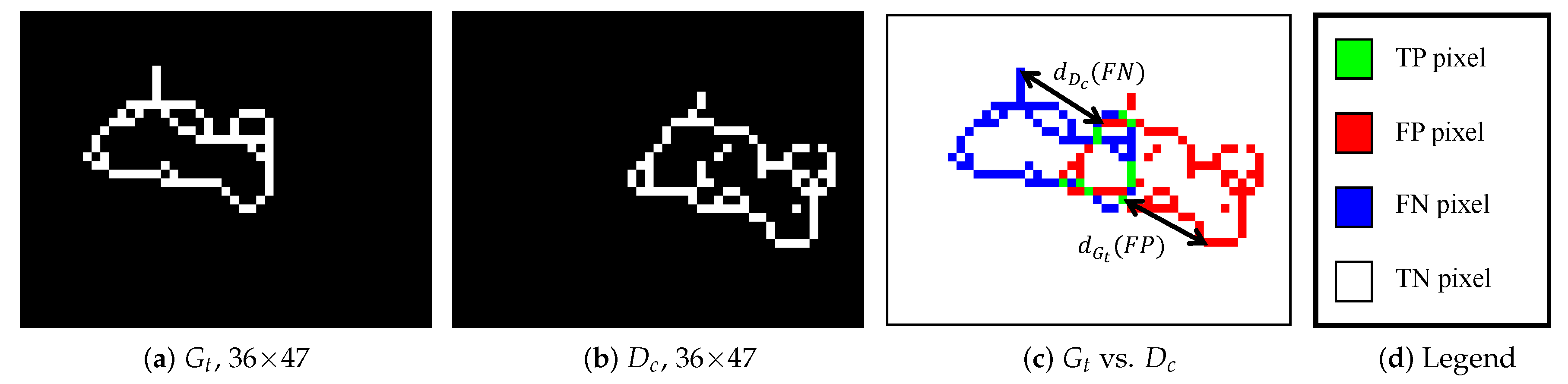
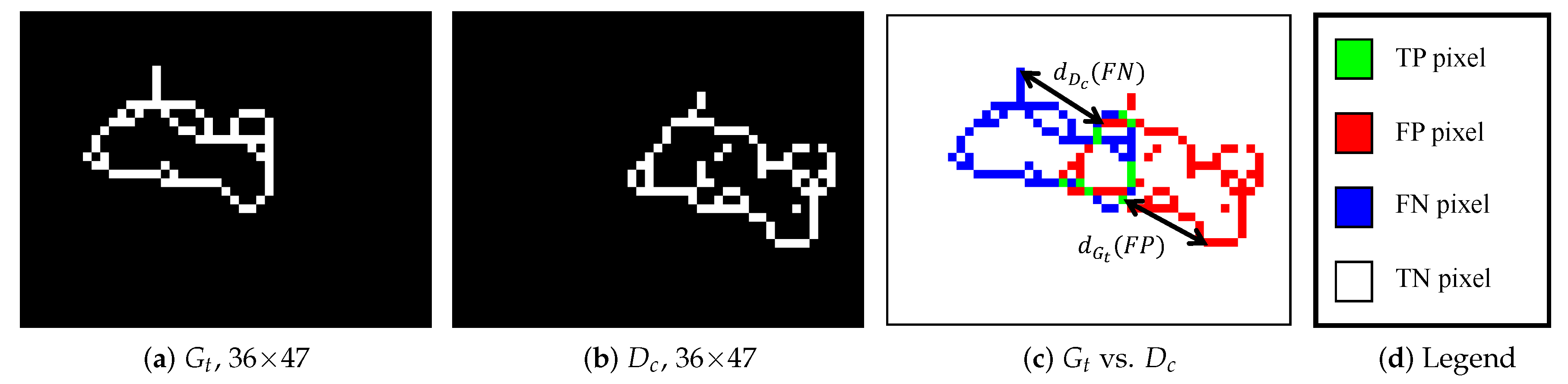
- True Positive points (TPs): ,
- False Positive points (FPs): ,
- False Negative points (FNs): ,
- True Negative points (TNs): .
3. A New Normalized Measure
4. Evaluation and Results
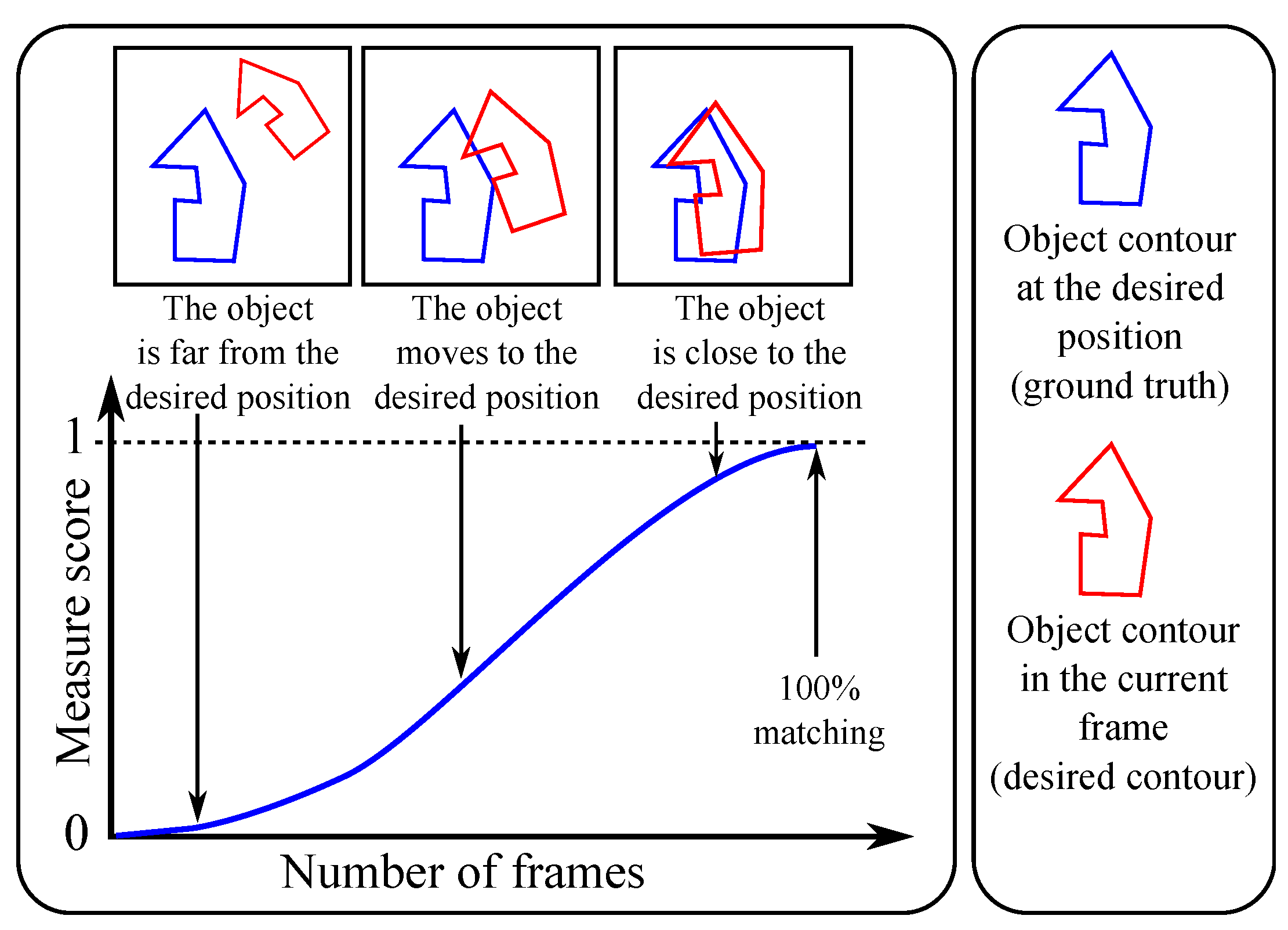
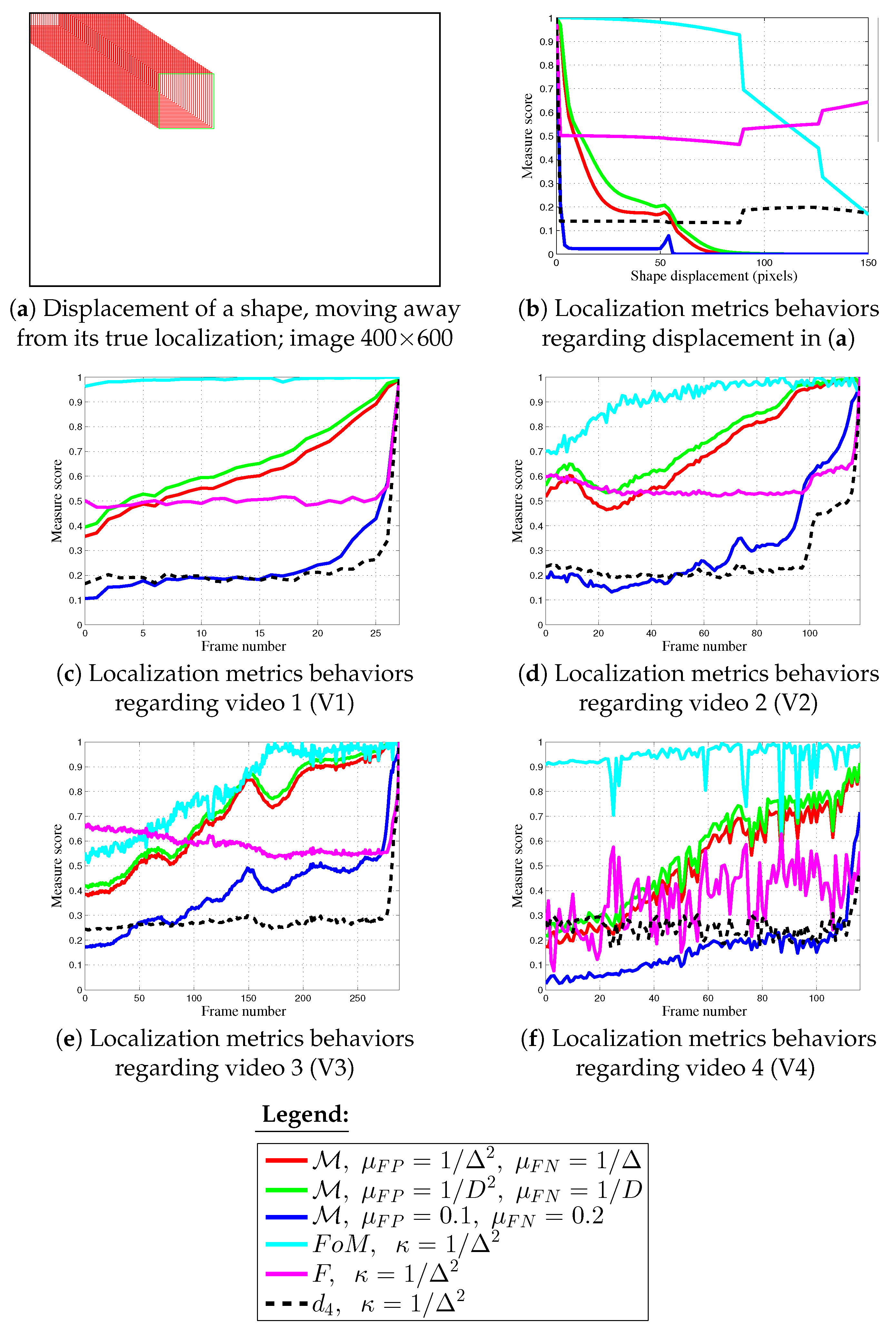
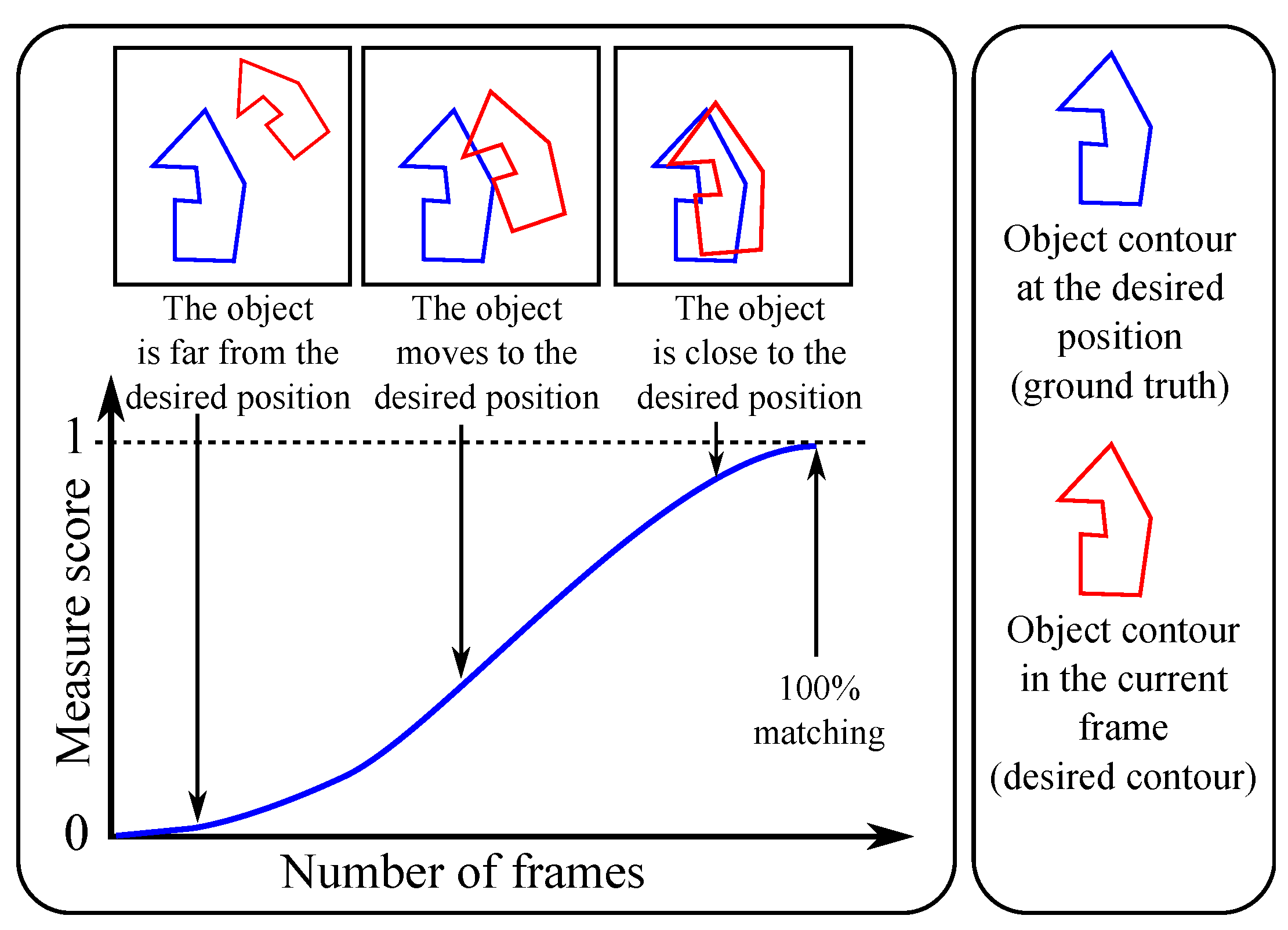
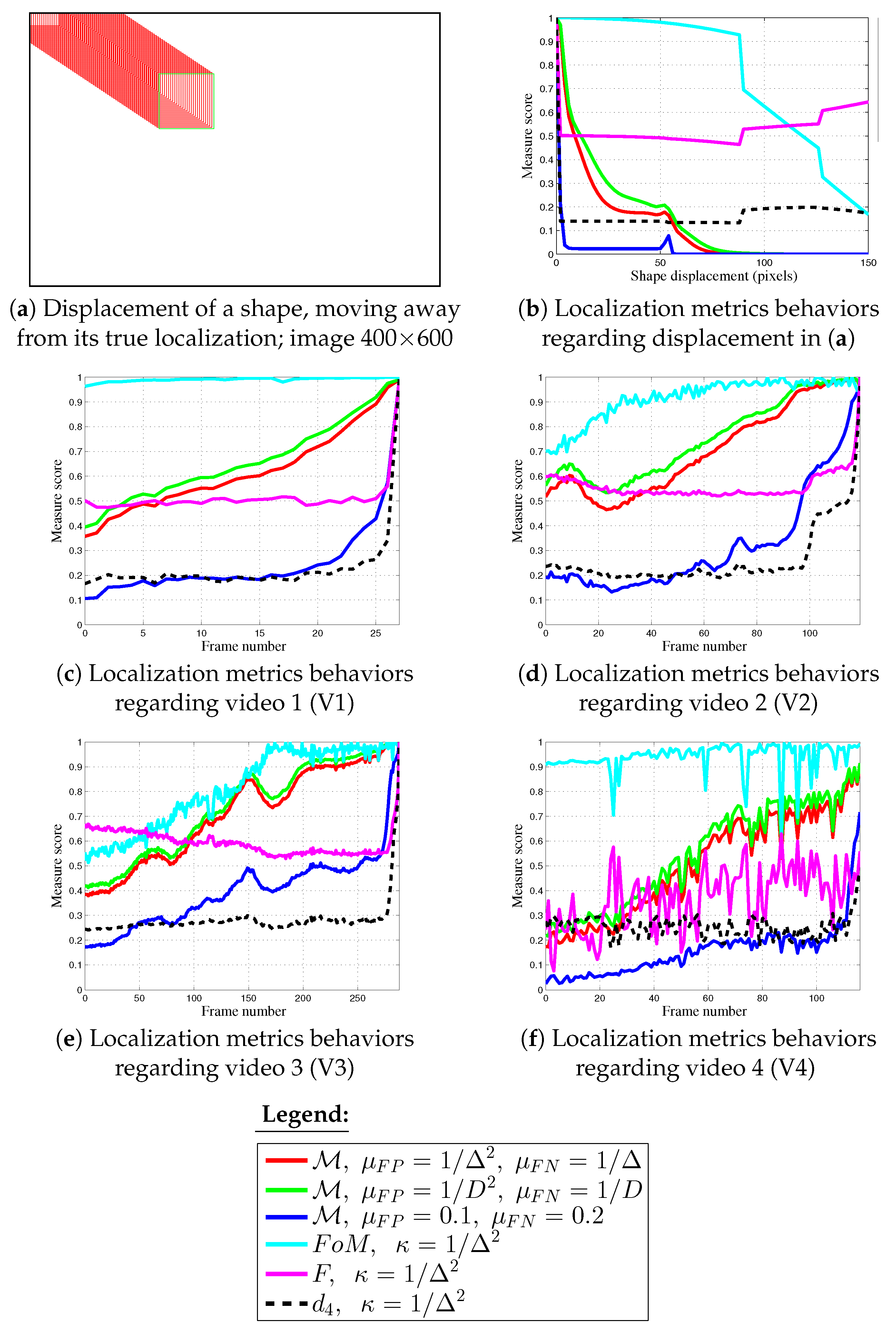
- increase towards 1 when the shape approaches its target,
- converge slowly towards 1 when the movement towards the target is slow,
- rise rapidly towards 1 when the movement towards the target is rapid,
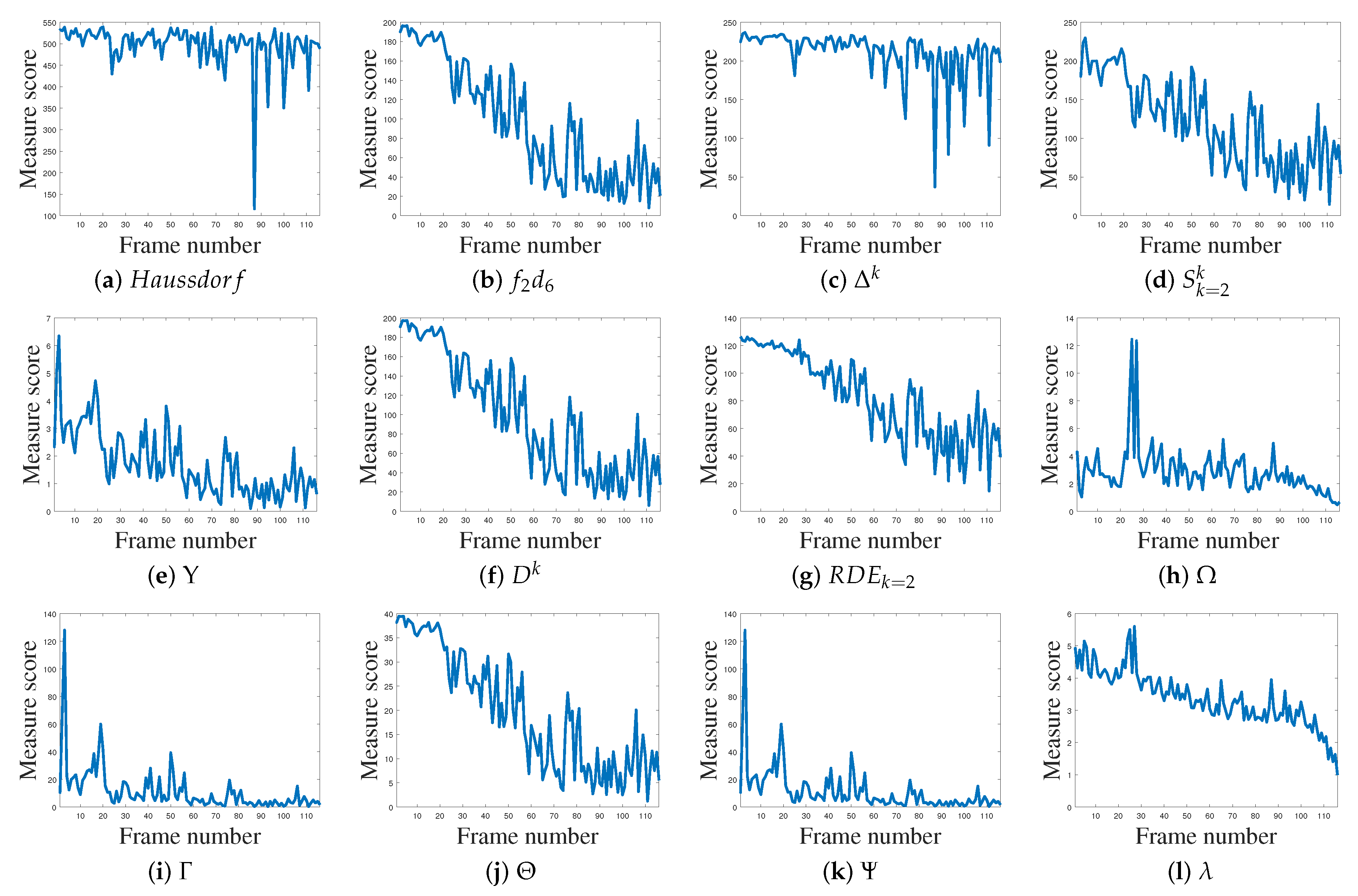
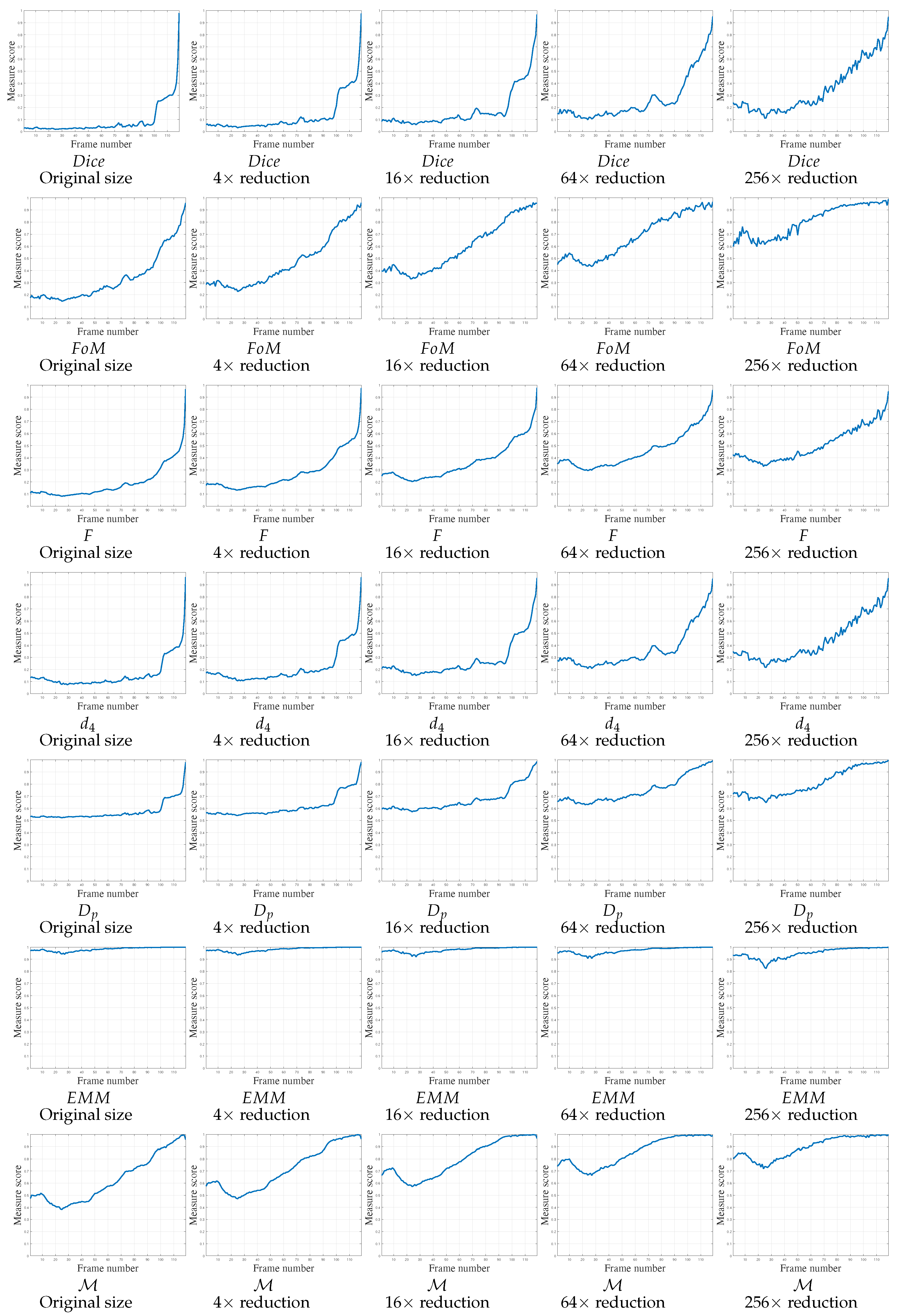
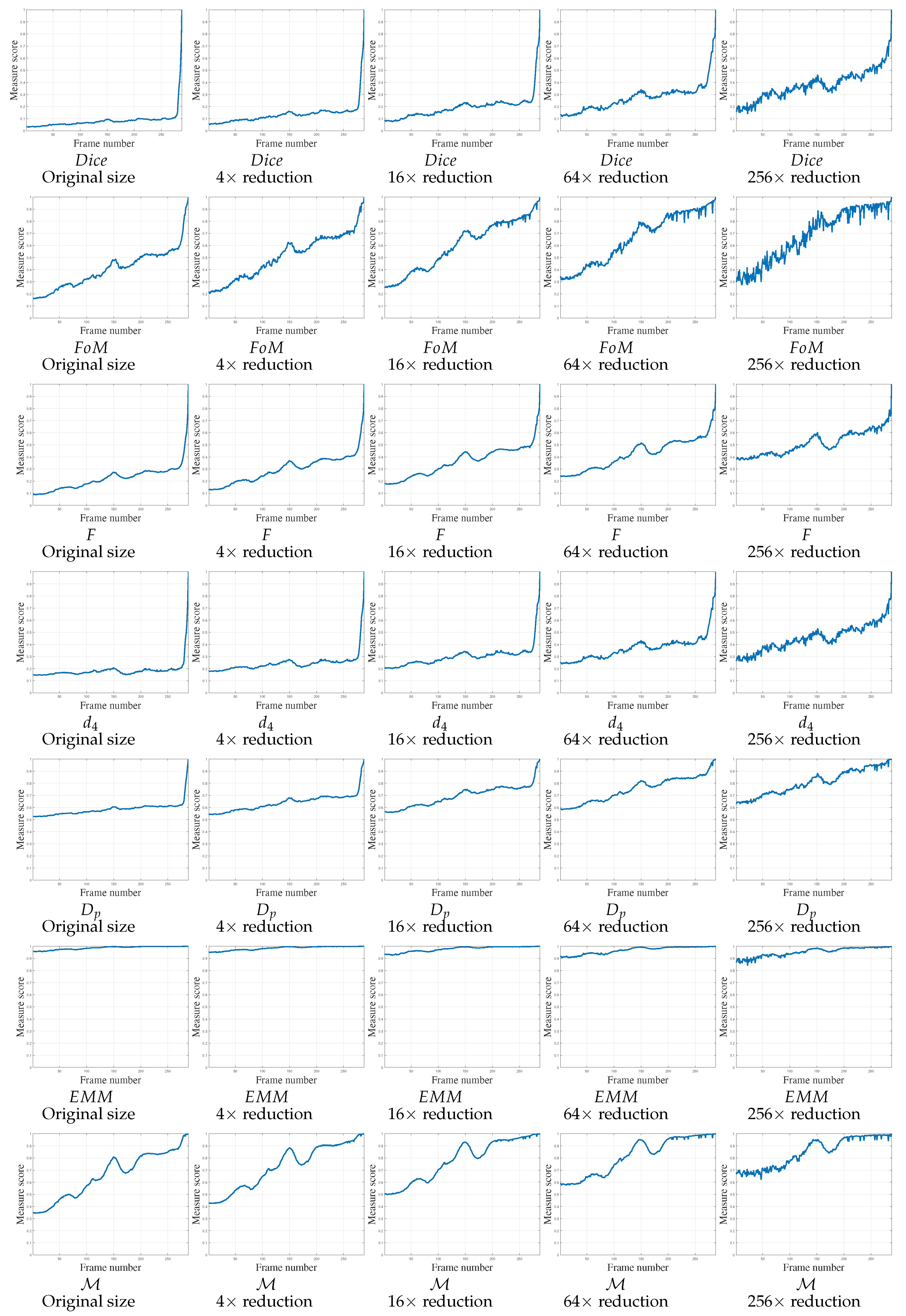
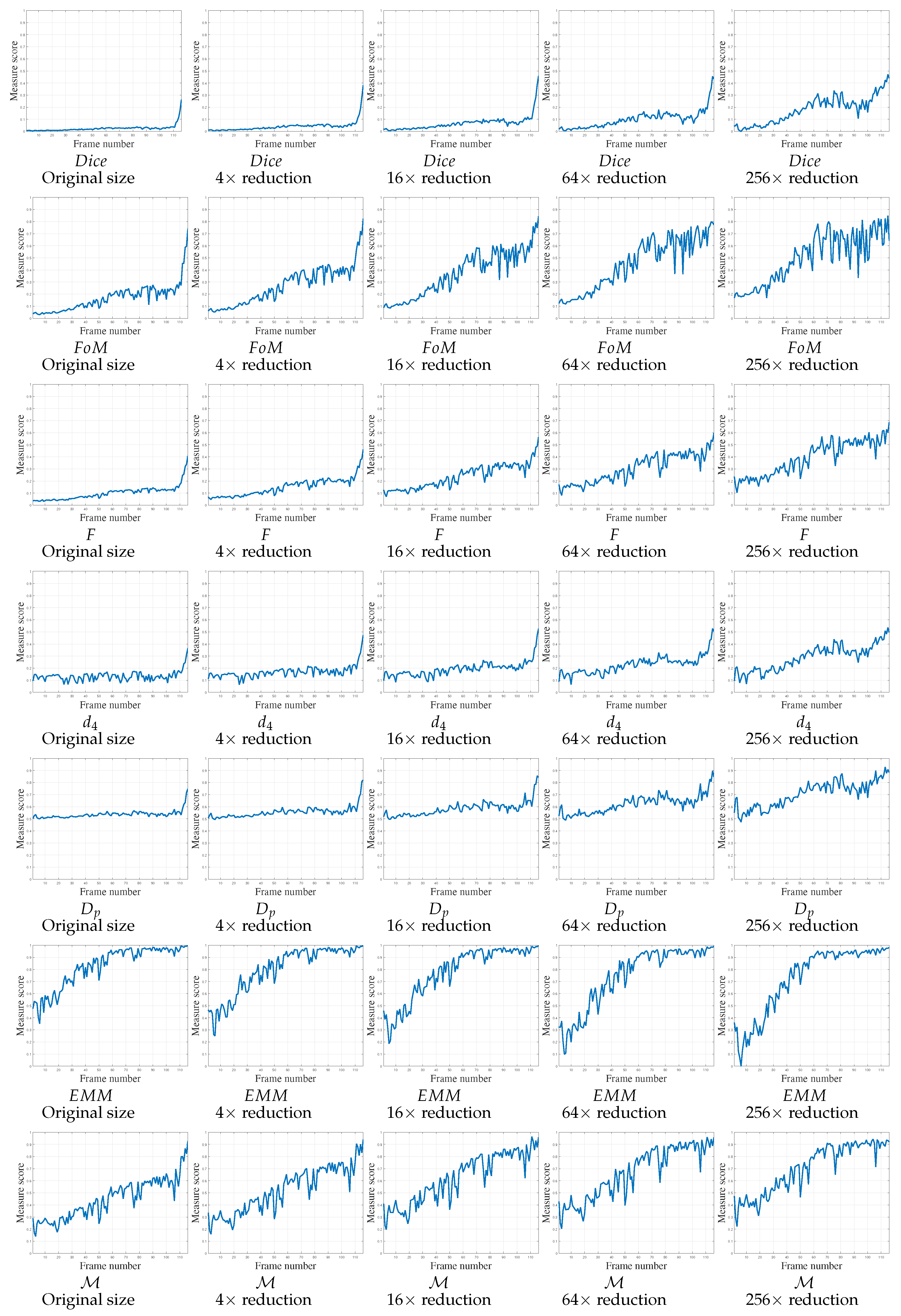
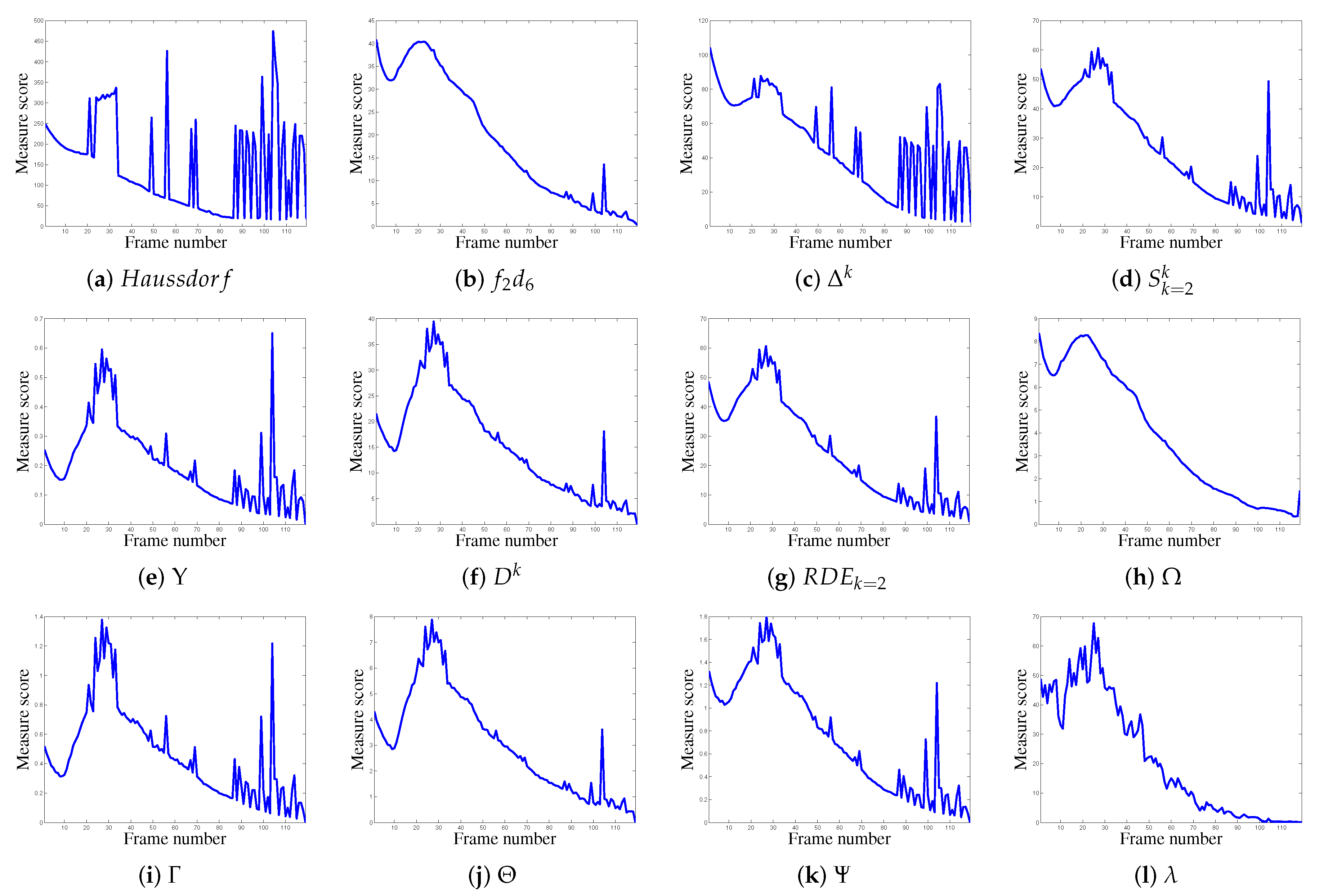
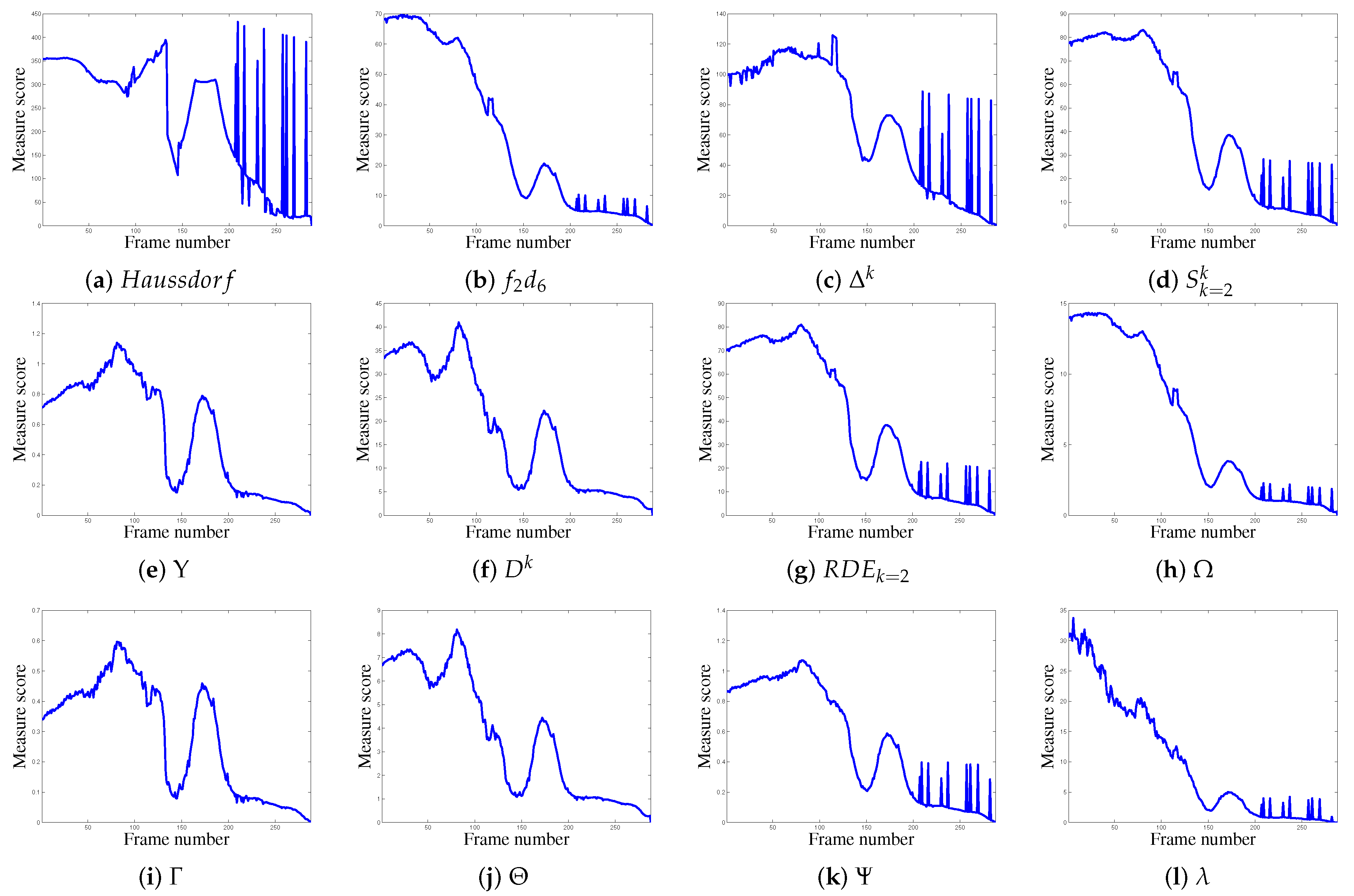
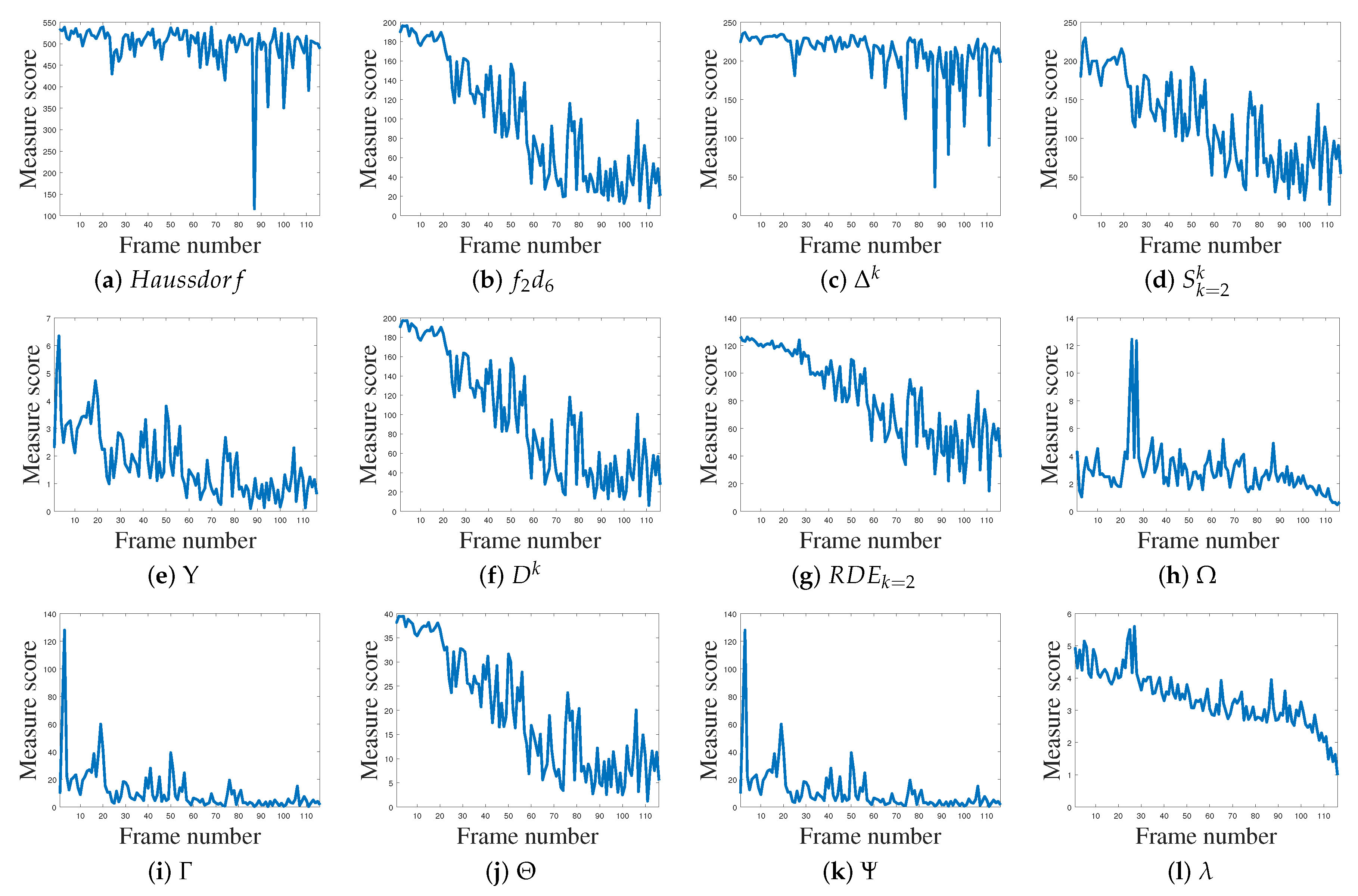
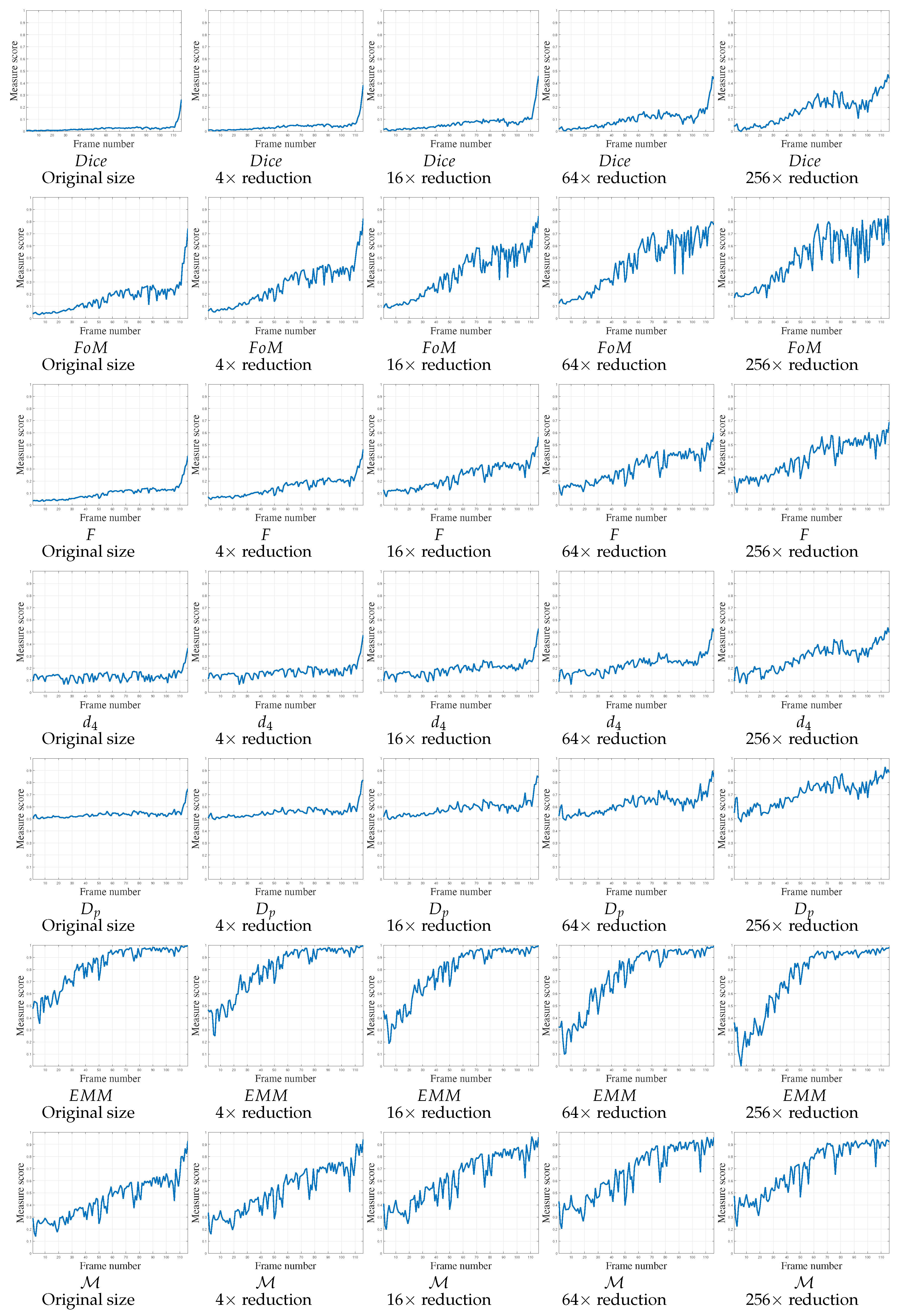
- not be disturbed (error peaks, see results in Appendix A) by the sudden appearance of outliers or the disappearance of some feature pixels,
- remain stable (i.e., constant) when the object is immobile, despite the undesirable contours (outliers) detected during the video.
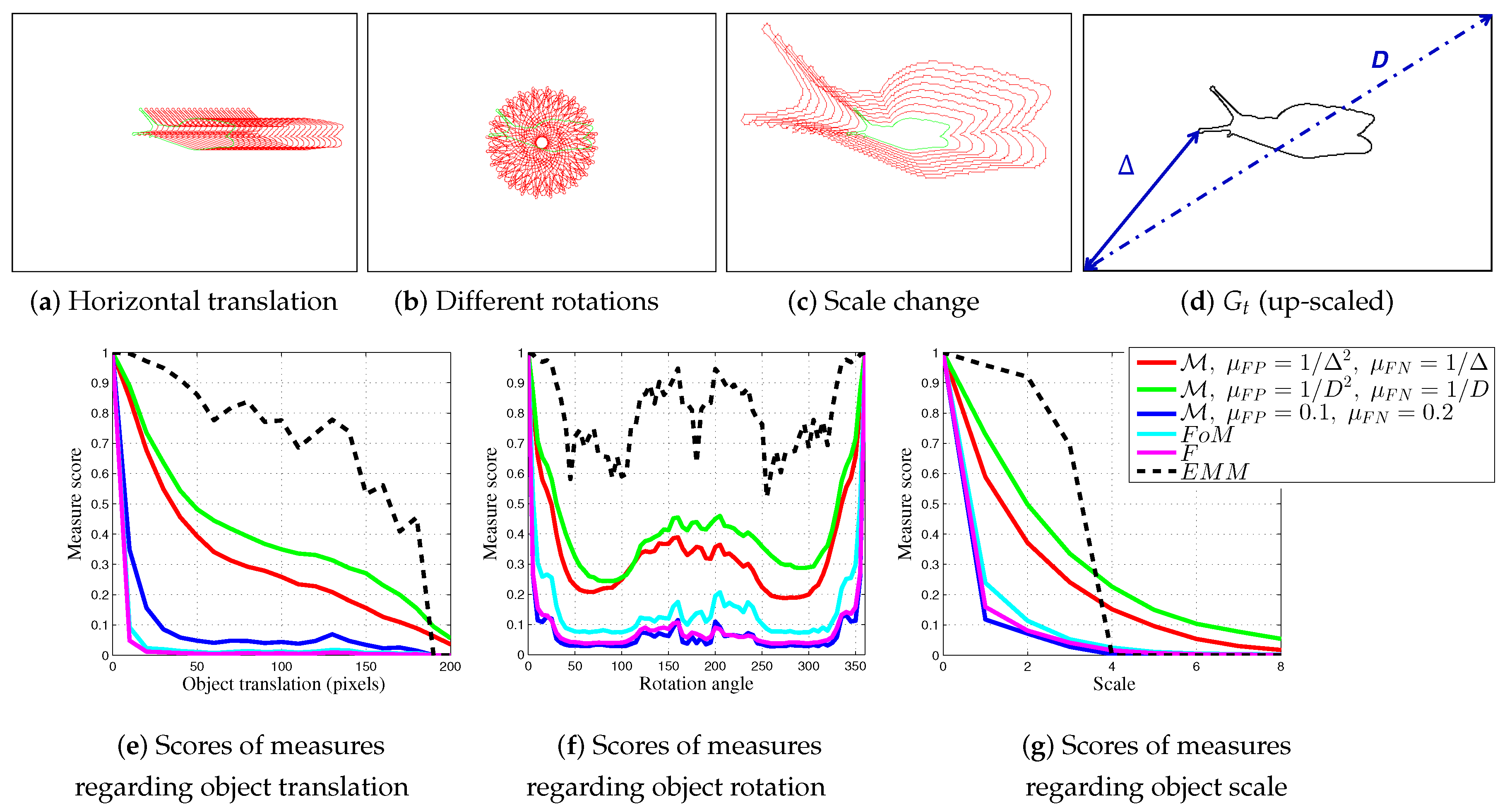
4.1. Experiments with Synthetic Shapes
4.1.1. Translation
4.1.2. Rotation
4.1.3. Scale Change
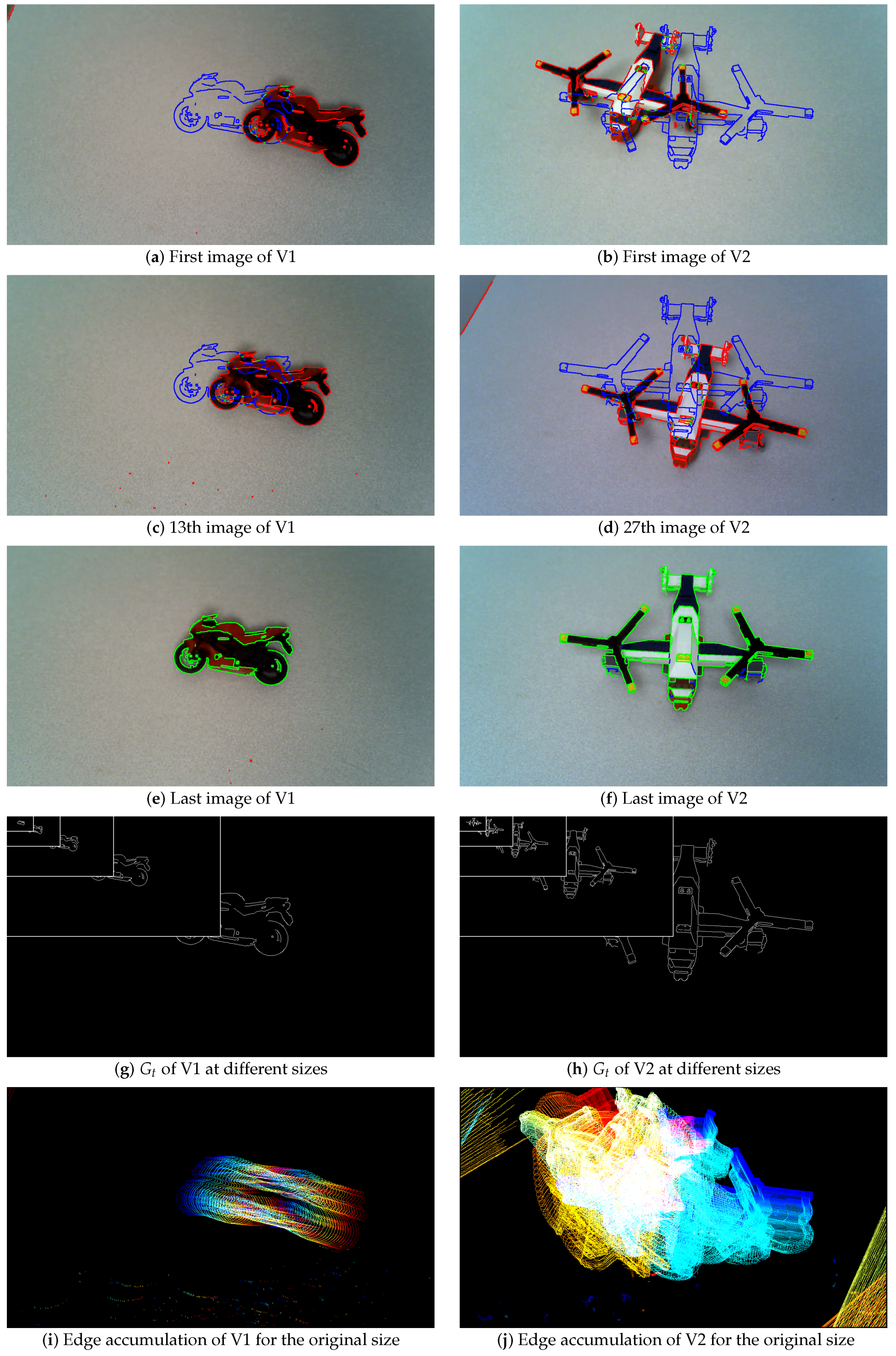
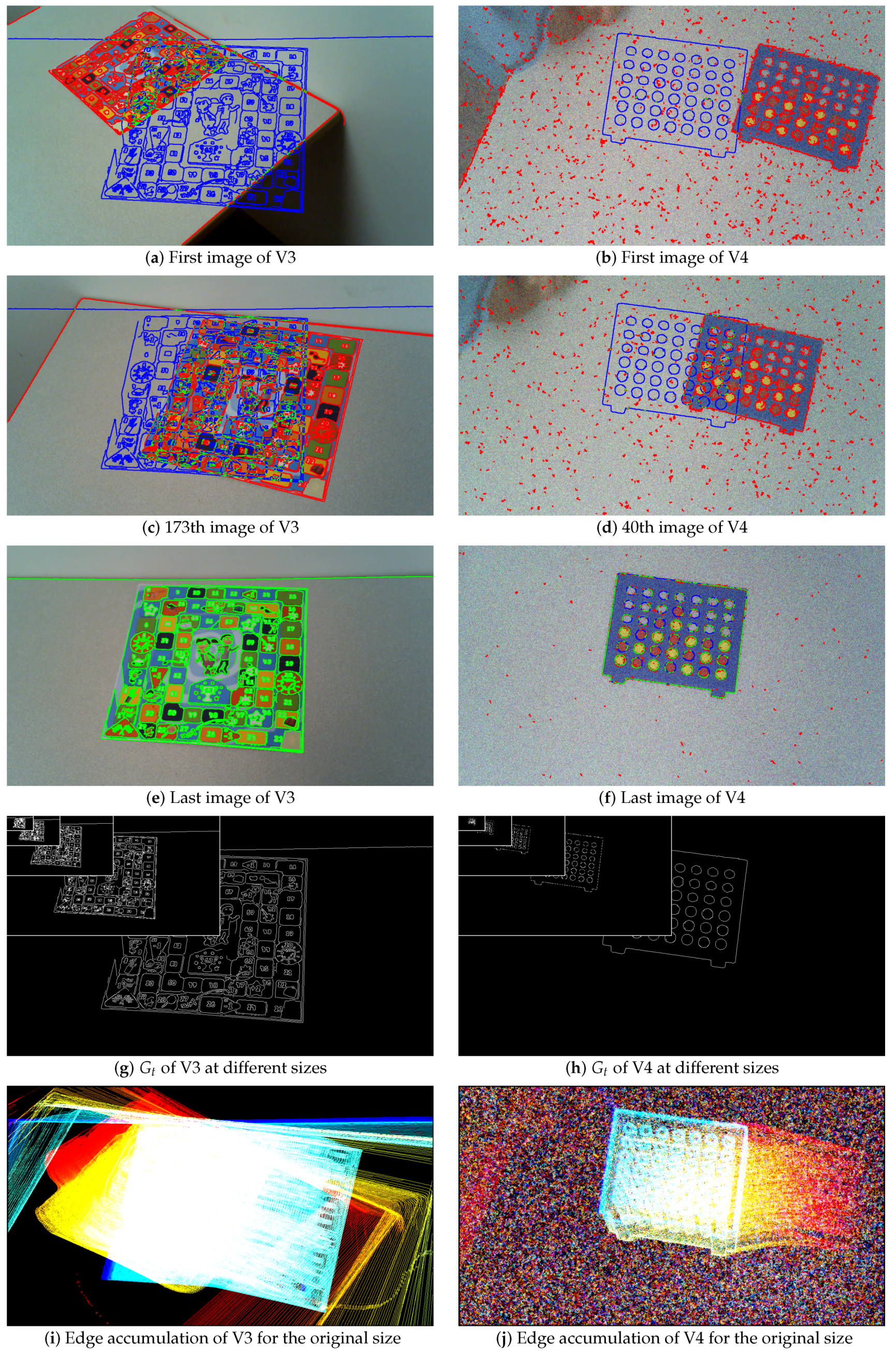
4.2. Experiments on Real Images
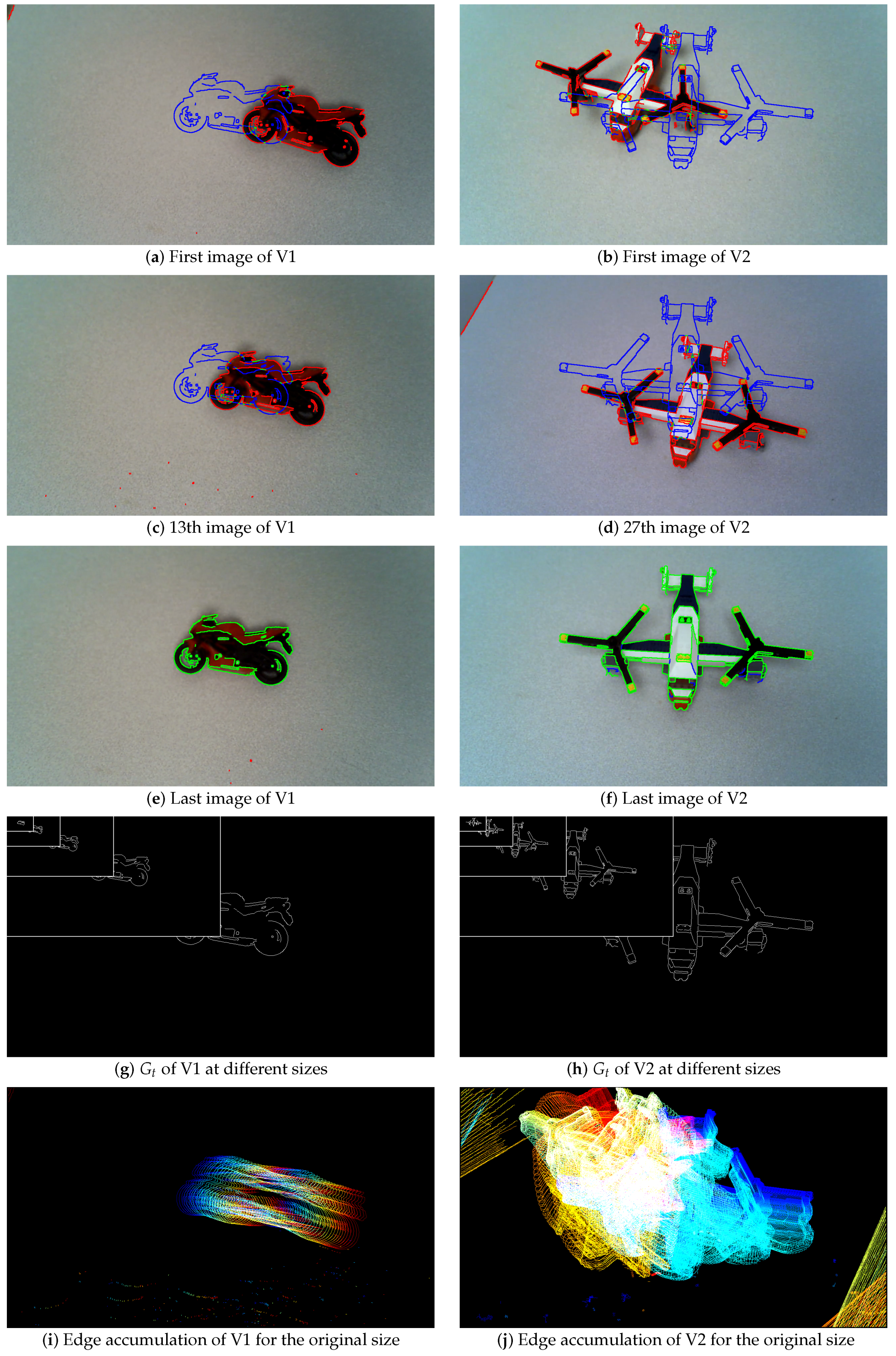
4.2.1. Real Video 1 (V1)
4.2.2. Real Video 2 (V2)
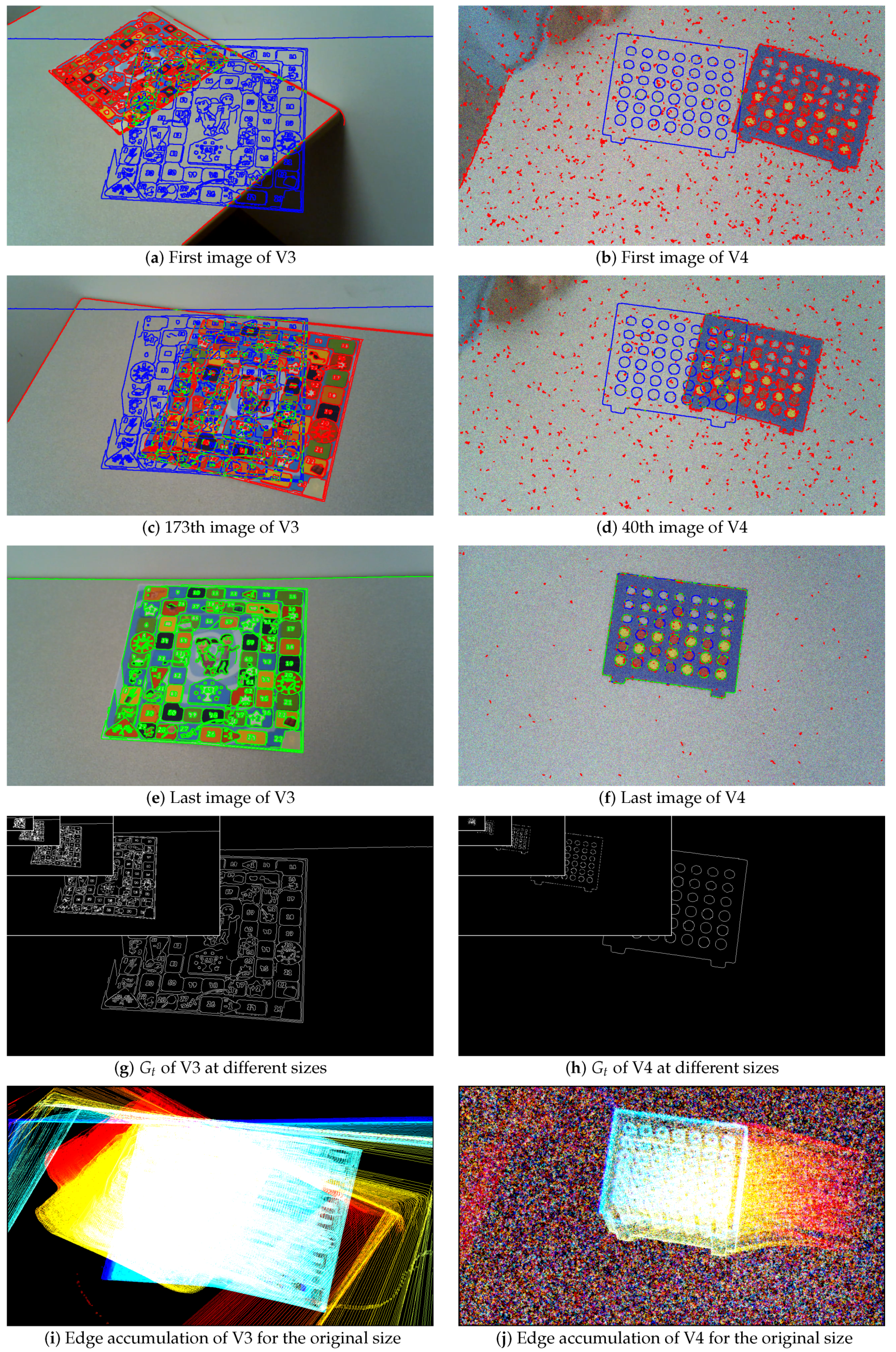
4.2.3. Real Video 3 (V3)
4.2.4. Real Video 4 (V4)
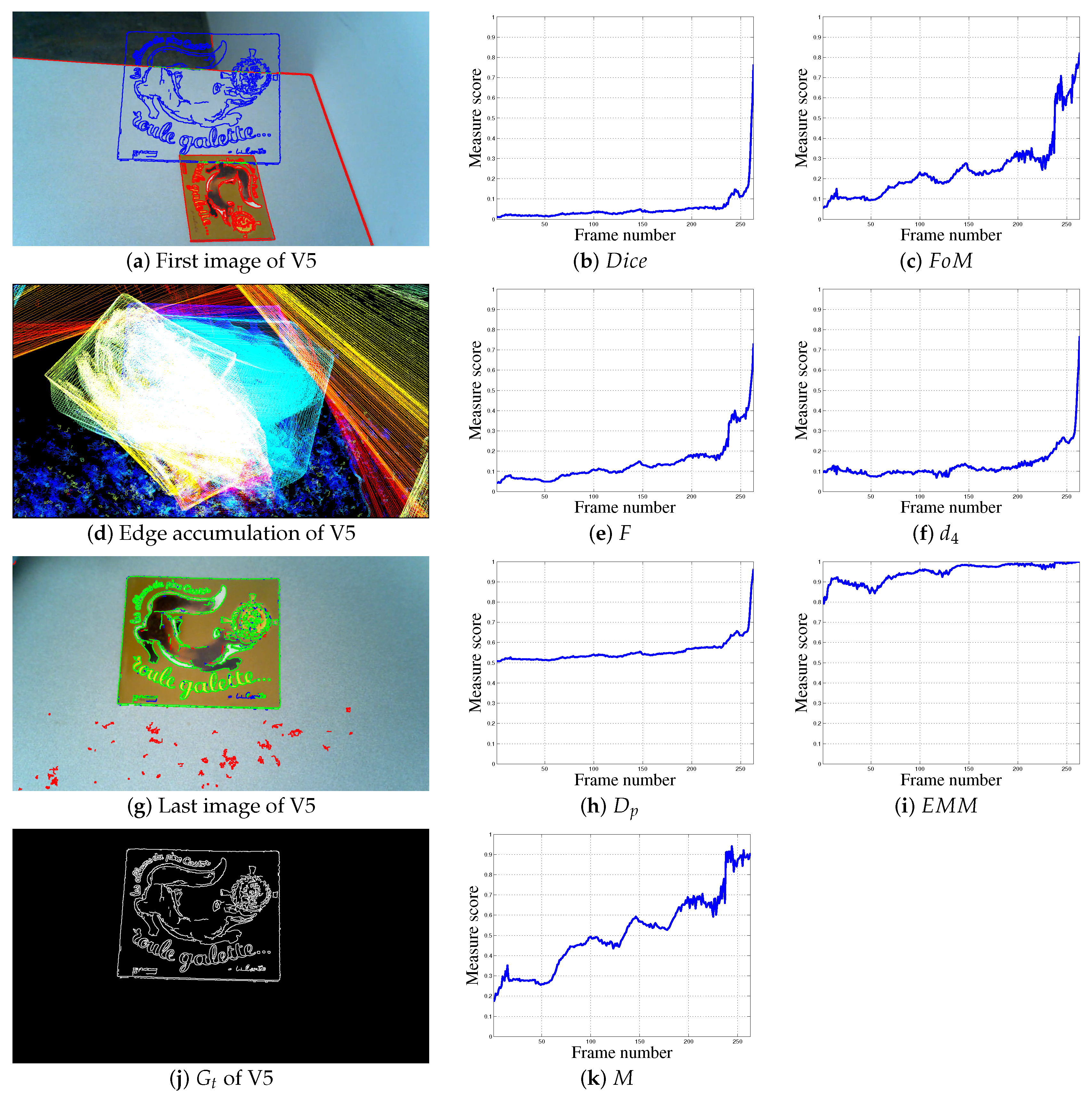
4.2.5. Real Video 5 (V5)
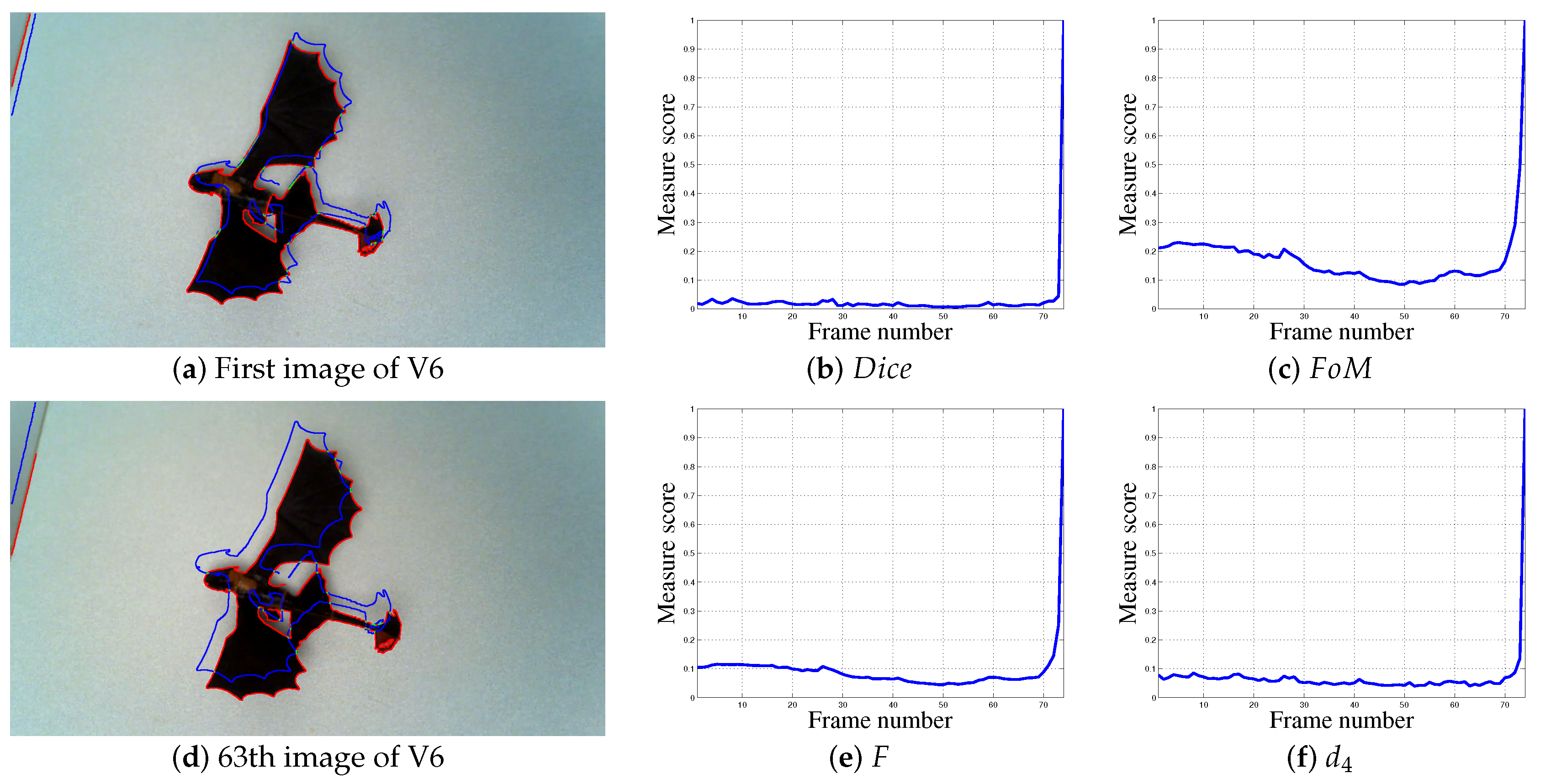
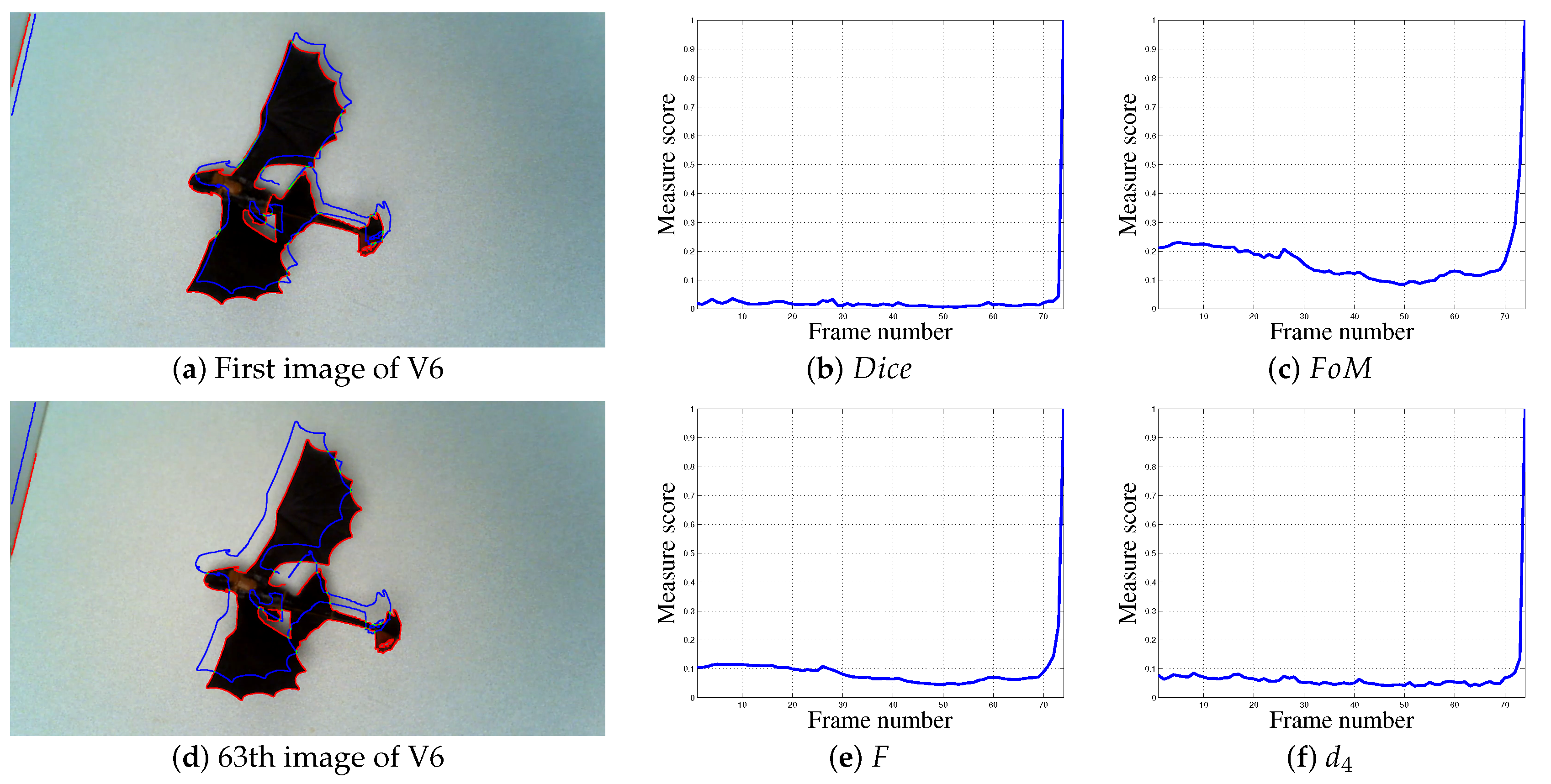
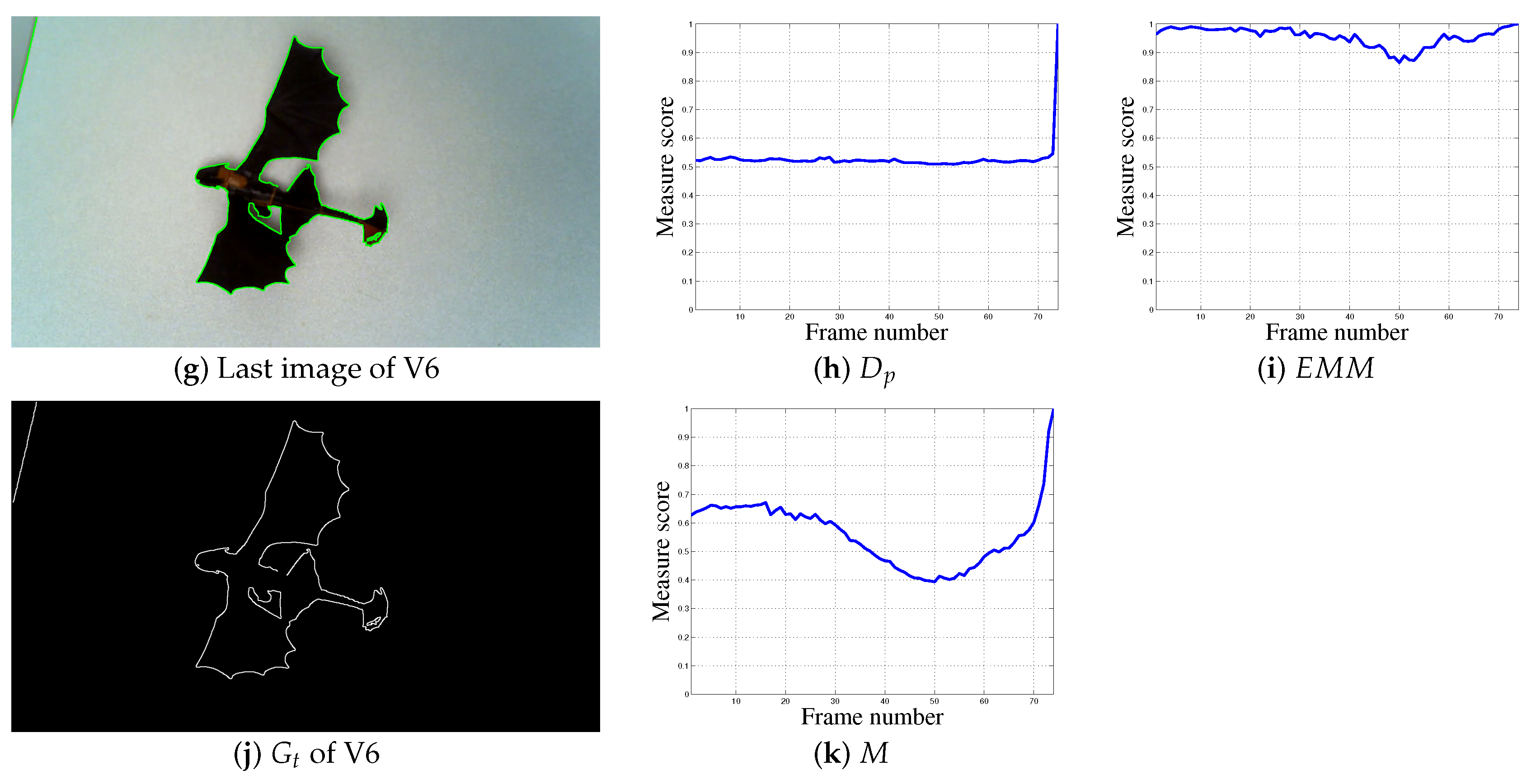
4.2.6. Real Video 6 (V6)
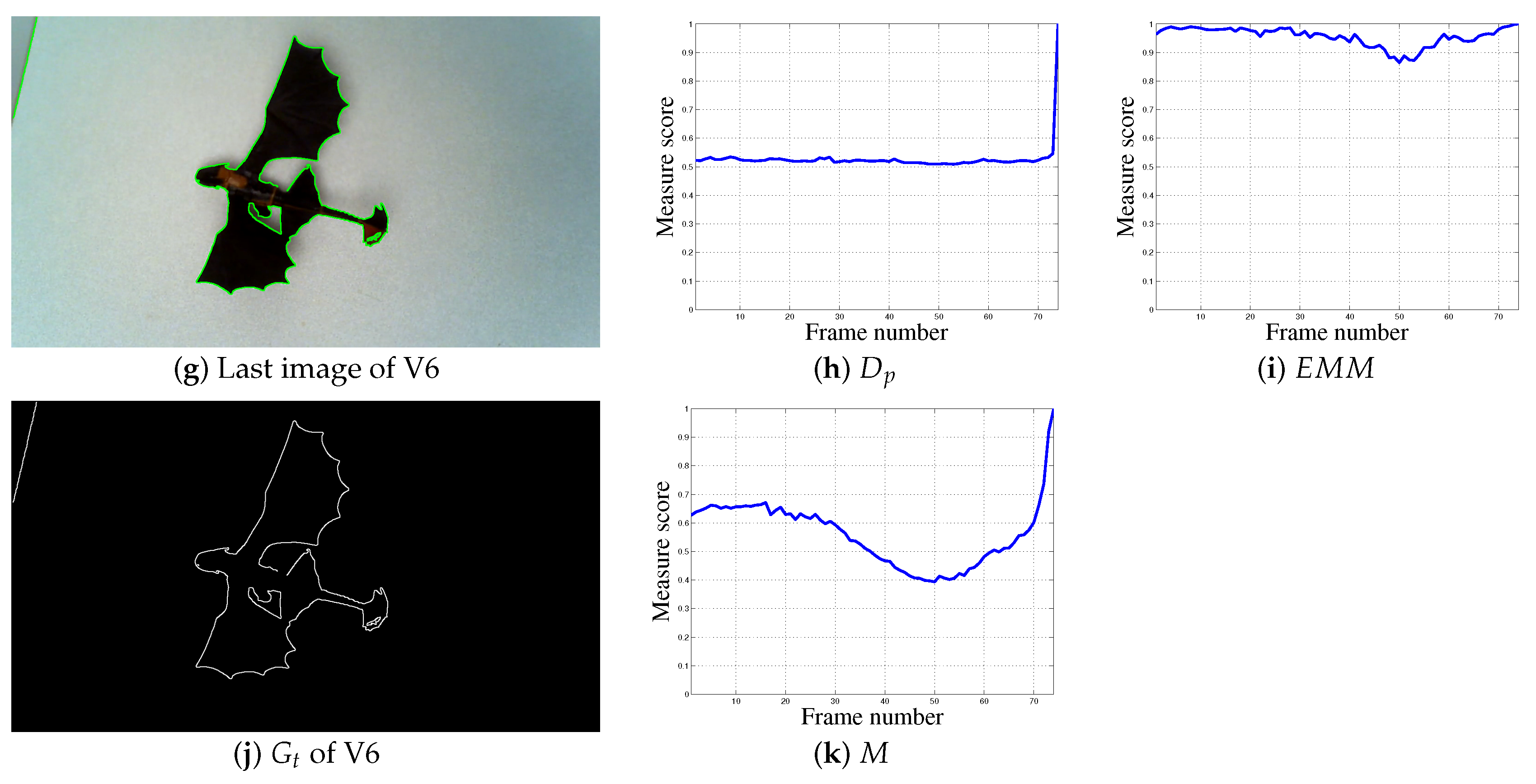
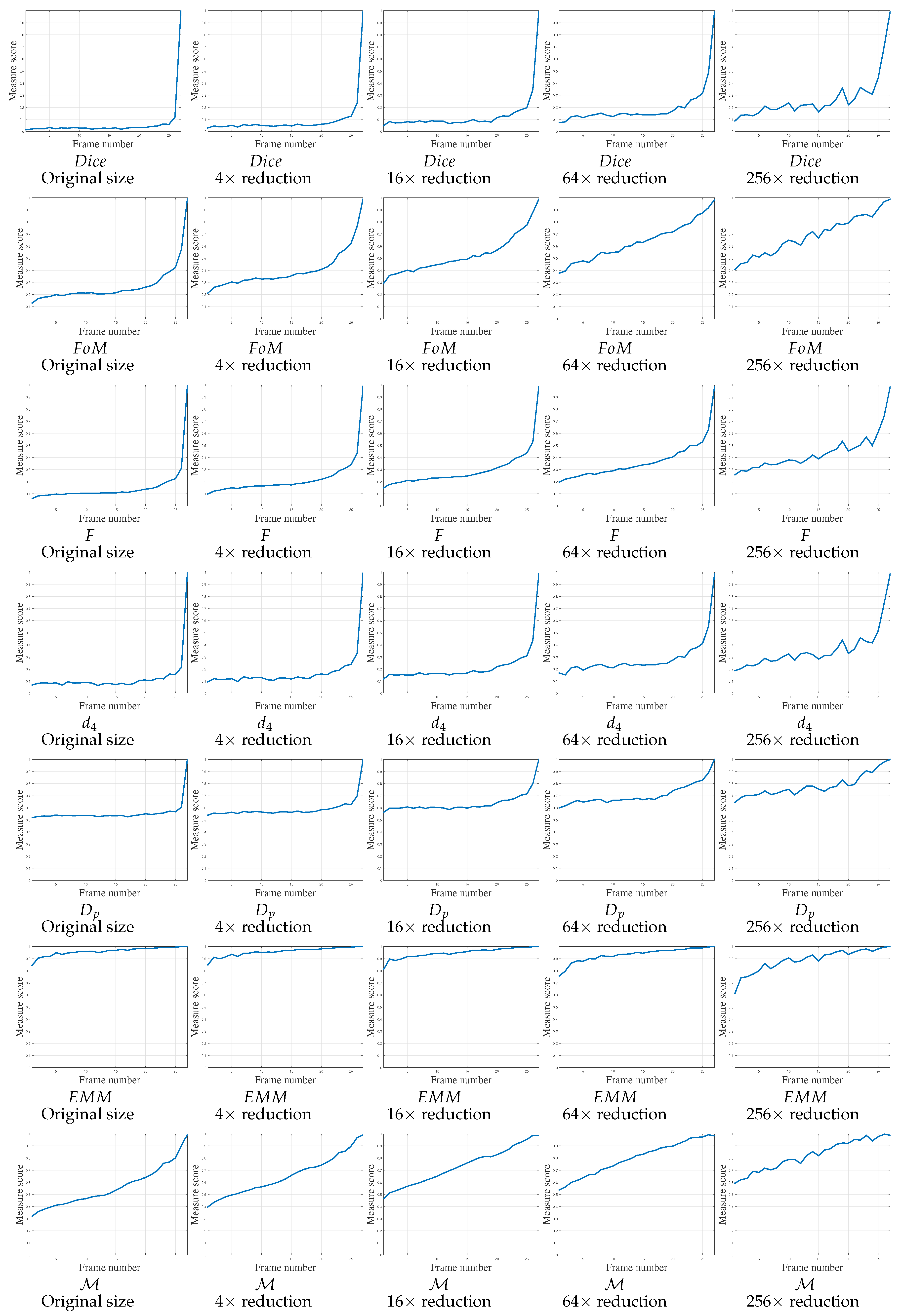
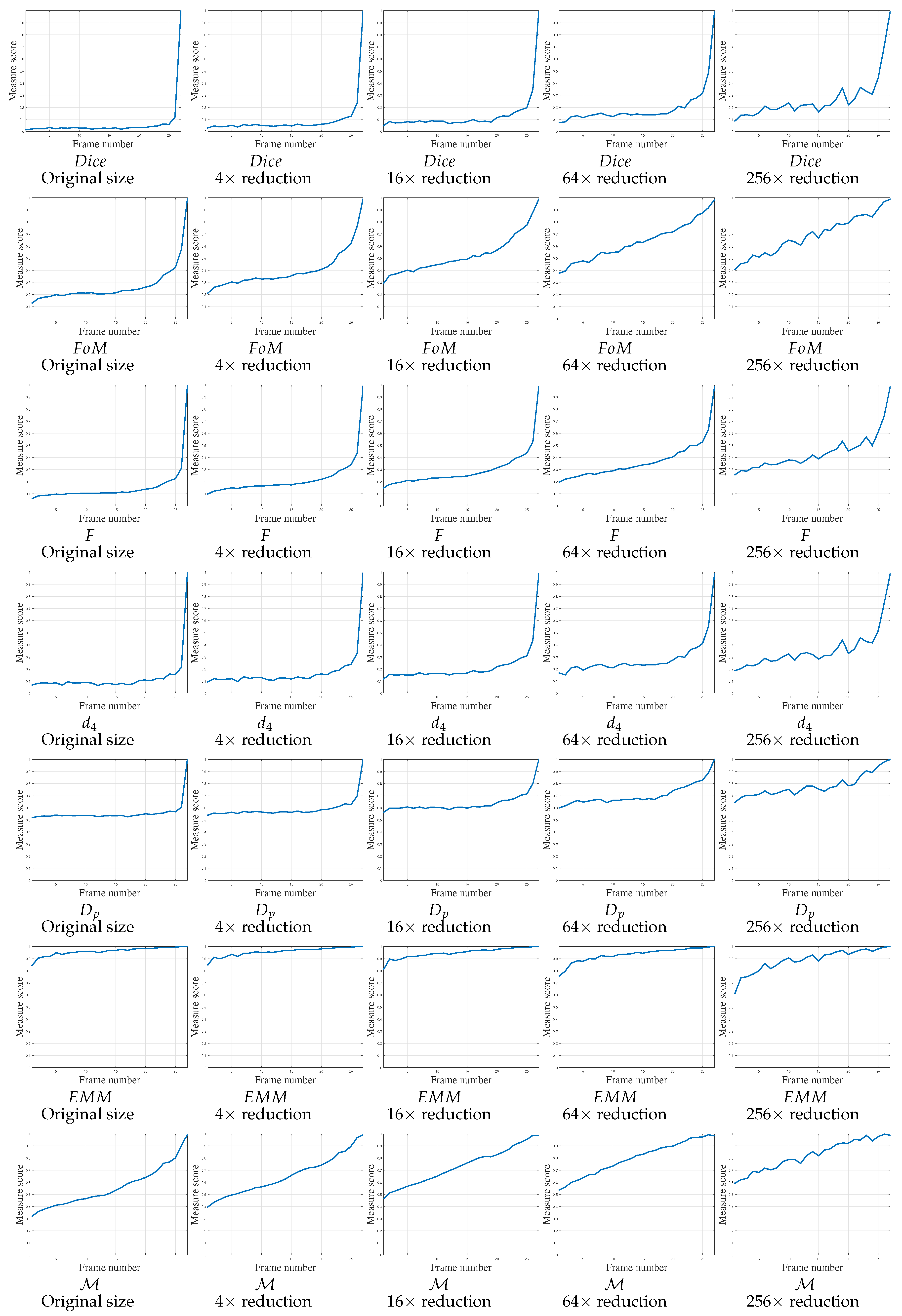
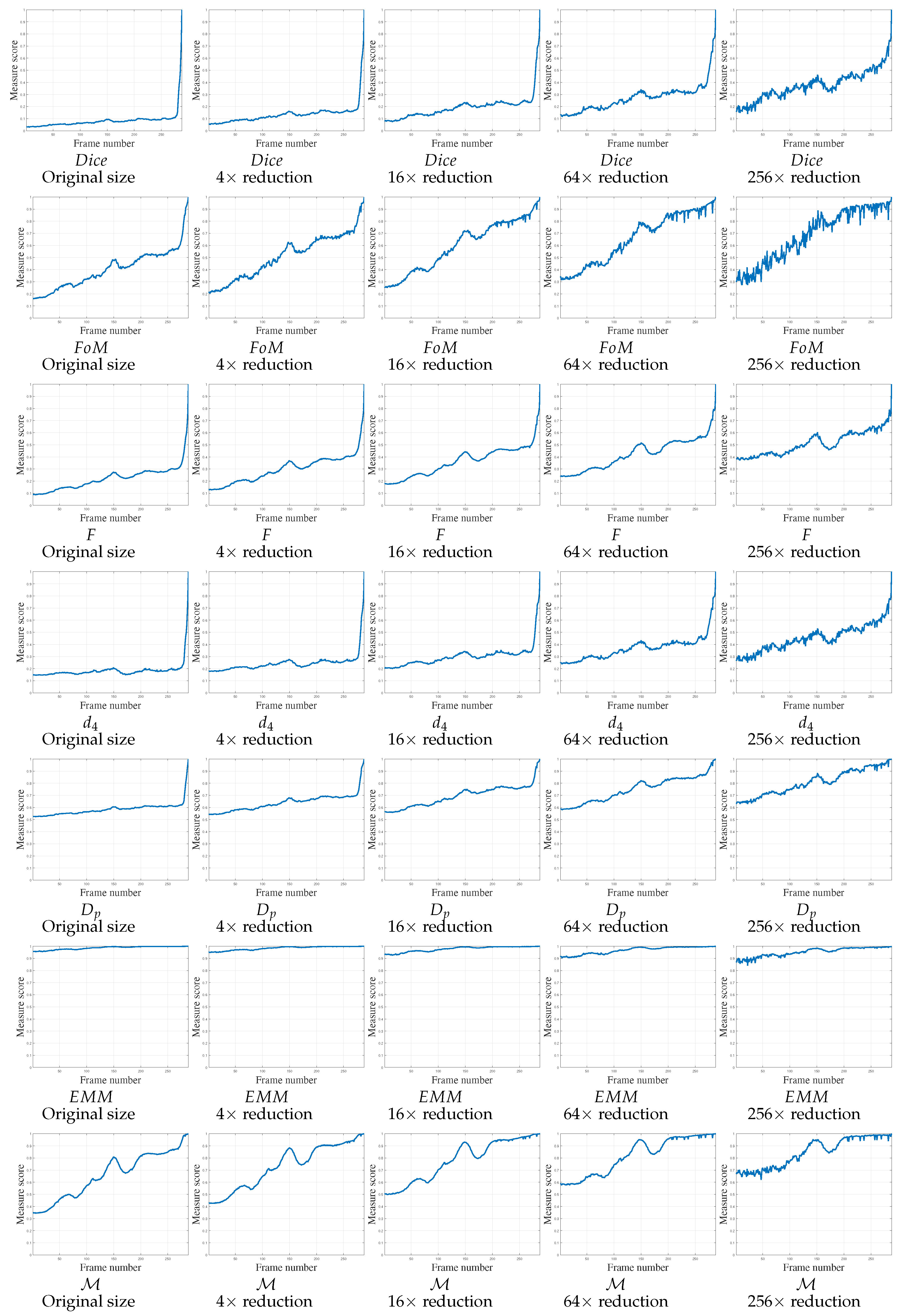
4.3. Influence of the Parameters
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A
- Oversegmentation measures (recording only distances of FPs): , , and .
- Undersegmentation measure (recording only distances of FNs): .
- Measures recording distances of both FPs and FNs: H, , , , and .

| Error Measure Name | Formulation | Parameters |
|---|---|---|
| Yasnoff measure [24] | None | |
| Hausdorff distance [25] | None | |
| Maximum distance [3] | None | |
| Distance to [3,5,26] | , for [3,26] | |
| Oversegmentation measure [27] | for [27]: and | |
| Undersegmentation measure [27] | for [27]: and | |
| [3,7,21,22] | , | , for [3], for [21,22] |
| Symmetric distance [3,5] | , for [3] | |
| Baddeley’s Delta Metric [28] | and a convex function | |
| Magnier et al. measure [29] | None | |
| Complete distance measure [6] | None | |
| measure [30] | None |
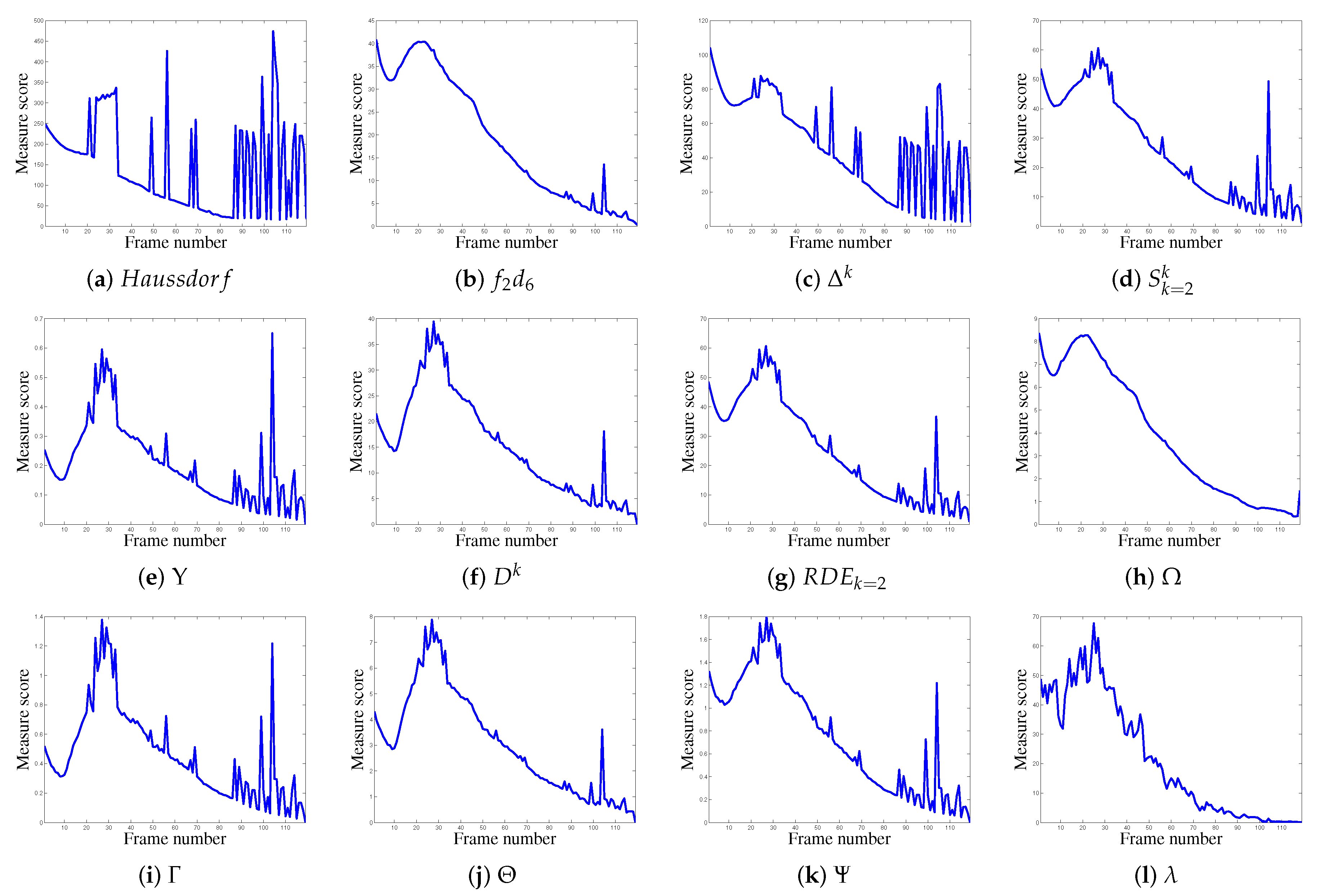
| (a) | (b) | (c) | (d) |
| (e) | (f) | (g) | (h) |
| (i) | (j) | (k) | (l) |

| (a) | (b) | (c) | (d) |
| (e) | (f) | (g) | (h) |
| (i) | (j) | (k) | (l) |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
References
- Zhang, D.; Lu, G. Review of shape representation and description techniques. Pattern Recognit. 2004, 2004. 37, 1–19. [Google Scholar] [CrossRef]
- Moradi, B.; Abdulrahman, H.; Magnier, B. A New Normalized Method of Object Shape-based Recognition and Localization. In Proceedings of the The International Conference on PatternRecognition Systems (ICRPS-19), Tours, France, 8–10 July 2019. [Google Scholar]
- Dubuisson, M.P.; Jain, A.K. A modified Hausdorff distance for object matching. In Proceedings of the Proceedings of 12th International Conference on Pattern Recognition, Jerusalem, Israel, 9–13 October 1994; Volume 1, pp. 566–568. [Google Scholar]
- Chabrier, S.; Laurent, H.; Rosenberger, C.; Emile, B. Comparative study of contour detection evaluation criteria based on dissimilarity measures. EURASIP J. Image Video Process. 2008, 2008, 693053. [Google Scholar] [CrossRef]
- Lopez-Molina, C.; De Baets, B.; Bustince, H. Quantitative error measures for edge detection. Pattern Recognit. 2013, 46, 1125–1139. [Google Scholar] [CrossRef]
- Magnier, B. Edge detection: A review of dissimilarity evaluations and a proposed normalized measure. Multimed. Tools Appl. 2018, 77, 9489–9533. [Google Scholar] [CrossRef]
- Magnier, B.; Abdulrahman, H.; Montesinos, P. A Review of Supervised Edge Detection Evaluation Methods and an Objective Comparison of Filtering Gradient Computations Using Hysteresis Thresholds. J. Imaging 2018, 4, 74. [Google Scholar] [CrossRef]
- Dice, L.R. Measures of the amount of ecologic association between species. Ecology 1945, 26, 297–302. [Google Scholar] [CrossRef]
- Crum, W.R.; Camara, O.; Hill, D.L. Generalized overlap measures for evaluation and validation in medical image analysis. IEEE Trans. Med. Imaging 2006, 25, 1451–1461. [Google Scholar] [CrossRef] [PubMed]
- Abdou, I.E.; Pratt, W.K. Quantitative design and evaluation of enhancement/thresholding edge detectors. Proc. IEEE 1979, 67, 753–763. [Google Scholar] [CrossRef]
- Pinho, A.J.; Almeida, L.B. Edge detection filters based on artificial neural networks. In Proceedings of the International Conference on Image Analysis and Processing, San Remo, Italy, 13–15 September 1995; pp. 159–164. [Google Scholar]
- Boaventura, A.G.; Gonzaga, A. Method to evaluate the performance of edge detector. In Proceedings of the 19th Brazilian Symposium on Computer Graphics and Image Processing (SIBGRAPI 2006), Manaus, Brazil, 8–11 October 2006; pp. 234–236. [Google Scholar]
- Panetta, K.; Gao, C.; Agaian, S.; Nercessian, S. A New Reference-Based Edge Map Quality Measure. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 1505–1517. [Google Scholar] [CrossRef]
- Sezgin, M.; Sankur, B. Survey over image thresholding techniques and quantitative performance evaluation. J. Electron. Imaging 2004, 13, 146–166. [Google Scholar]
- Grauman, K.; Darrell, T. Fast contour matching using approximate earth mover’s distance. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Washington, DC, USA, 27 June–2 July 2004; Volume 1, p. I. [Google Scholar]
- Fan, H.; Su, H.; Guibas, L.J. A point set generation network for 3d object reconstruction from a single image. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 605–613. [Google Scholar]
- Rubner, Y.; Tomasi, C.; Guibas, L.J. The earth mover’s distance as a metric for image retrieval. Int. J. Comput. Vis. 2000, 40, 99–121. [Google Scholar] [CrossRef]
- Davies, E.R. Computer Vision: Principles, Algorithms, Applications, Learning; Academic Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Abdulrahman, H.; Magnier, B.; Montesinos, P. From contours to ground truth: How to evaluate edge detectors by filtering. J. WSCG 2017, 25, 133–142. [Google Scholar]
- Magnier, B.; Abdulrahman, H. A Study of Measures for Contour-based Recognition and Localization of Known Objects in Digital Images. In Proceedings of the 2018 Eighth International Conference on Image Processing Theory, Tools and Applications (IPTA), Xi’an, China, 7–10 November 2018; pp. 1–6. [Google Scholar]
- Yang-Mao, S.F.; Chan, Y.K.; Chu, Y.P. Edge enhancement nucleus and cytoplast contour detector of cervical smear images. IEEE Trans. Syst. Man Cybern. Part B 2008, 38, 353–366. [Google Scholar] [CrossRef] [PubMed]
- Magnier, B. An objective evaluation of edge detection methods based on oriented half kernels. In Proceedings of the International Conference on Image and Signal Processing, Cherbourg, France, 2–4 July 2018; pp. 80–89. [Google Scholar]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 679–698. [Google Scholar] [CrossRef] [PubMed]
- Yasnoff, W.; Galbraith, W.; Bacus, J. Error measures for objective assessment of scene segmentation algorithms. Anal. Quant. Cytol. 1978, 1, 107–121. [Google Scholar]
- Huttenlocher, D.; Rucklidge, W. A multi-resolution technique for comparing images using the Hausdorff distance. Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 15–17 June 1993; pp. 705–706. [Google Scholar]
- Peli, T.; Malah, D. A study of edge detection algorithms. Comput. Graph. Image Process. 1982, 20, 1–21. [Google Scholar] [CrossRef]
- Odet, C.; Belaroussi, B.; Benoit-Cattin, H. Scalable discrepancy measures for segmentation evaluation. In Proceedings of the International Conference on Image Processing, Rochester, NY, USA, 22–25 September 2002; Volume 1, pp. 785–788. [Google Scholar]
- Baddeley, A.J. An error metric for binary images. In Robust Computer Vision: Quality of Vision Algorithms; Wichmann: Bonn, Germany, 1992; pp. 59–78. [Google Scholar]
- Magnier, B.; Le, A.; Zogo, A. A Quantitative Error Measure for the Evaluation of Roof Edge Detectors. In Proceedings of the 2016 IEEE International Conference on Imaging Systems and Techniques (IST), Chania, Greece, 4–6 October 2016; pp. 429–434. [Google Scholar]
- Abdulrahman, H.; Magnier, B.; Montesinos, P. A New Objective Supervised Edge Detection Assessment using Hysteresis Thresholds. In Proceedings of the International Conference on Image Analysis and Processing, Catania, Italy, 11–15 September 2017; pp. 3–14. [Google Scholar]



| Error Measure Name | Formulation | Parameters |
|---|---|---|
| Pratt’s Figure of Merit [10] | ||
| revisited [11] | and a real positive | |
| Combination of and statistics [12] | ||
| Edge map quality measure [13] | ||
| Edge Mismatch Measure () [14] | , , and are real positive. | |
| = , , , , see [14]. |
| V1 | V2 | V3 | V4 | V5 | V6 | |
|---|---|---|---|---|---|---|
| Degree of noise | * | ** | ** | *** | ** | - |
| Degree of Translation | *** | * | ** | ** | *** | * |
| Degree of Rotation | - | ** | *** | - | *** | - |
| Degree of object scale change | - | * | ** | * | ** | - |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Magnier, B.; Moradi, B. Shape Similarity Measurement for Known-Object Localization: A New Normalized Assessment. J. Imaging 2019, 5, 77. https://doi.org/10.3390/jimaging5100077
Magnier B, Moradi B. Shape Similarity Measurement for Known-Object Localization: A New Normalized Assessment. Journal of Imaging. 2019; 5(10):77. https://doi.org/10.3390/jimaging5100077
Chicago/Turabian StyleMagnier, Baptiste, and Behrang Moradi. 2019. "Shape Similarity Measurement for Known-Object Localization: A New Normalized Assessment" Journal of Imaging 5, no. 10: 77. https://doi.org/10.3390/jimaging5100077
APA StyleMagnier, B., & Moradi, B. (2019). Shape Similarity Measurement for Known-Object Localization: A New Normalized Assessment. Journal of Imaging, 5(10), 77. https://doi.org/10.3390/jimaging5100077