Detection and Classification of Land Crude Oil Spills Using Color Segmentation and Texture Analysis

Abstract
1. Introduction
2. Materials and Methods
2.1. Materials
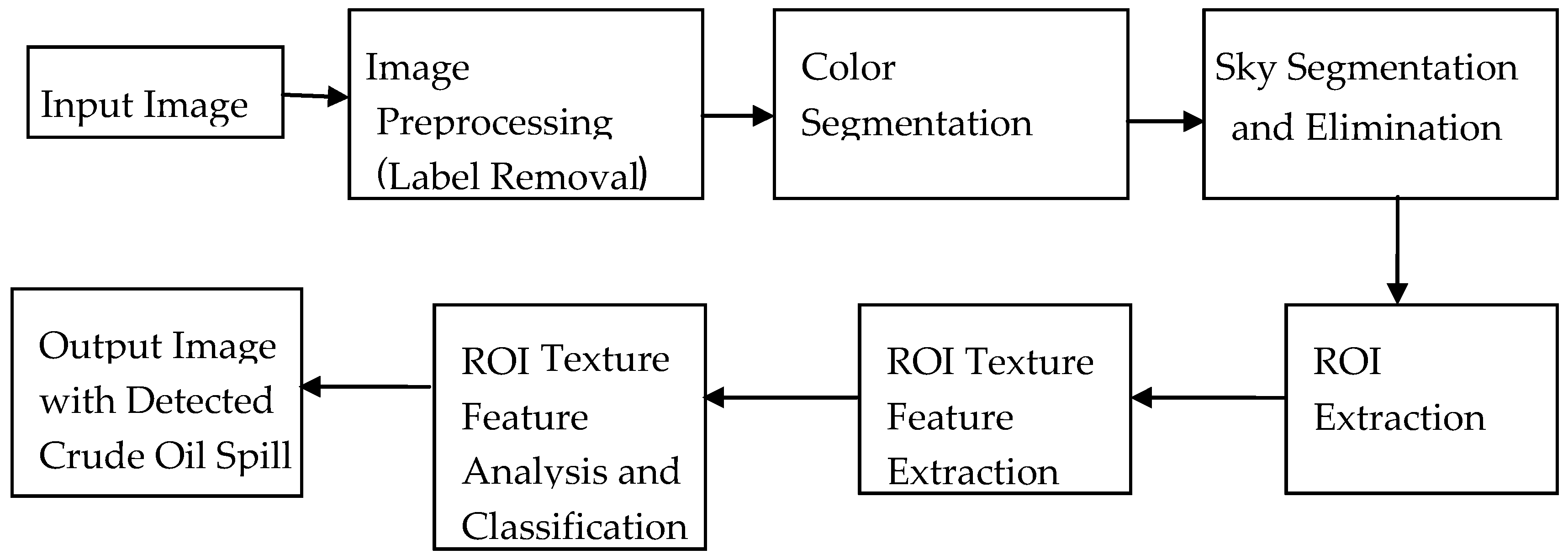
2.2. Methods
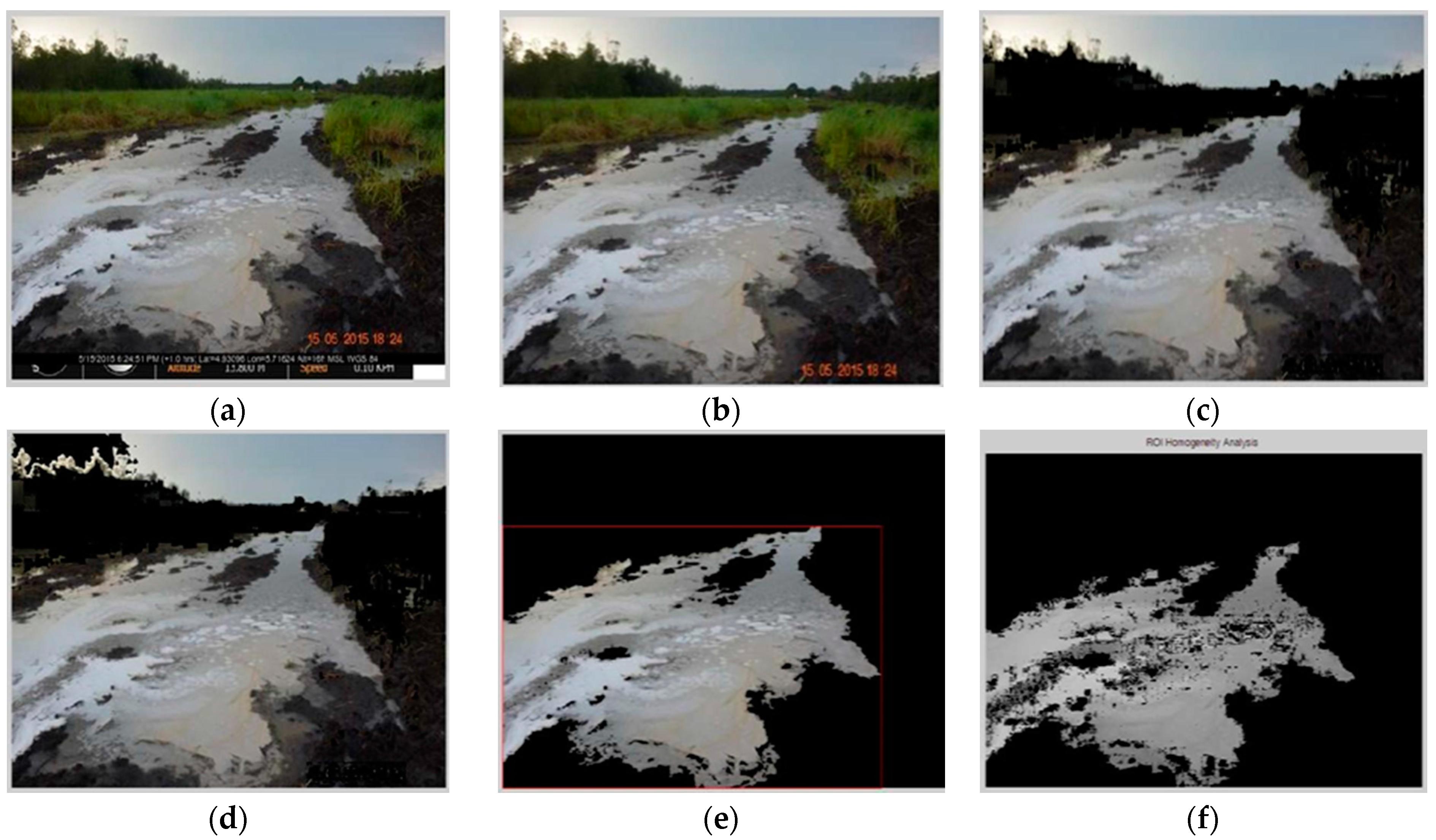
2.2.1. Image Preprocessing
2.2.2. Color Segmentation
2.2.3. Sky Segmentation and Elimination
2.2.4. ROI Extraction
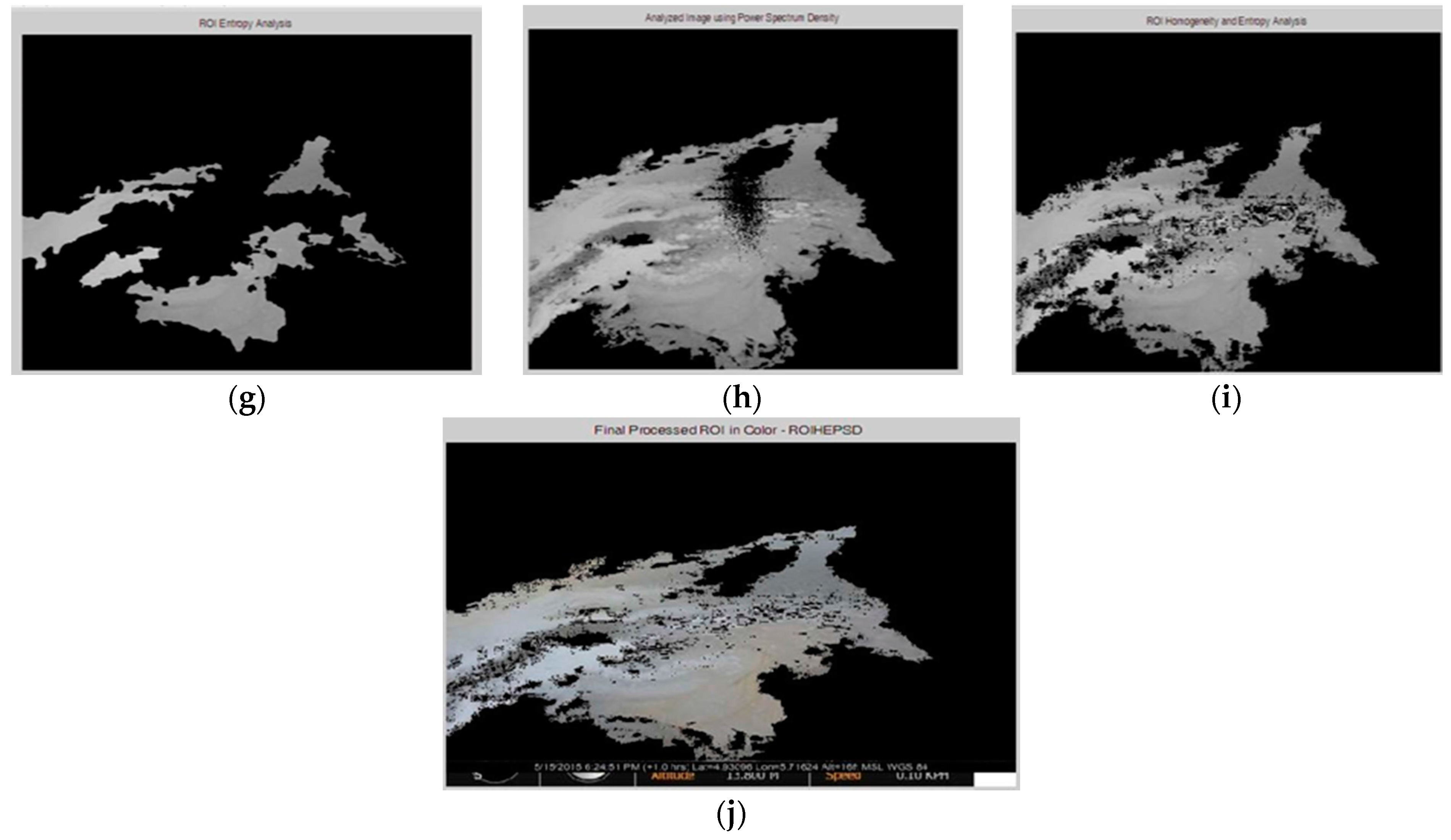
2.2.5. ROI Texture Feature Extraction
2.2.6. ROI Texture Feature Analysis and Classification
3. Results
4. Discussion
5. Conclusions
Author Contributions
Conflicts of Interest
Appendix A
1.
Case (h = 681)
PreprocessedImage = InitialImage(:,1:h − 100);
Case (h = 844)
PreprocessedImage = InitialImage (:,1:h − 70);
end
2.
For(int i = 1; i < w; i++)
For(int j = 1; j < h; j++)
If (PreprocessedImage(i,j,1) > VT1A && PreprocessedImage(i,j,1) < VT1B &&
PreprocessedImage(i,j,2) >VT2A && PreprocessedImage(i,j,2) < VT2B &&
PreprocessedImage(i,j,3) > VT3A && PreprocessedImage(i,j,3) < VT3B)
VSegmentedImage(i,j,1) = 0;
VSegmentedImage(i,j,2) = 0;
VSegmentedImage(i,j,3) = 0;
else
VSegmentedImage(i,j,1) = PreprocessedImage(i,j,1);
VSegmentedImage(i,j,2) = PreprocessedImage(i,j,2);
VSegmentedImage(i,j,3) = PreprocessedImage(i,j,3);
end
end
where
w = Image width
h = Image height
VT1A = minimum threshold for R component of green color identifying vegetation
VT1B = maximum threshold for R component of green color identifying vegetation
VT2A = minimum threshold for G component of green color identifying vegetation
VT2B = maximum threshold for G component of green color identifying vegetation
VT3A = minimum threshold for B component of green color identifying vegetation
VT3B = maximum threshold for B component of green color identifying vegetation
3.
For(int i = 1; i < w; i++)
For(int j = 1; j < h; j++)
If (VSegmentedImage(i,j,1) > ST1A && VSegmentedImage (i,j,1) < ST1B &&
VSegmentedImage (i,j,2) >ST2A && VSegmentedImage (i,j,2) < ST2B &&
VSegmentedImage (i,j,3) > ST3A && VSegmentedImage (i,j,3) < ST3B)
SkySegmentedImage(i,j,1) = 0;
SkySegmentedImage(i,j,2) = 0;
SkySegmentedImage(i,j,3) = 0;
else
SkySegmentedImage(i,j,1) = VSegmentedImage(i,j,1);
SkySegmentedImage(i,j,2) = VSegmentedImage(i,j,2);
SKySegmentedImage(i,j,3) = VSegmentedImage(i,j,3);
end
end
where
w = Image width
h = Image height
ST1A = minimum threshold for R component of blue and white color identifying sky
ST1B = maximum threshold for R component of blue and white color identifying sky
ST2A = minimum threshold for G component of blue and white color identifying sky
ST2B = maximum threshold for G component of blue and white color identifying sky
ST3A = minimum threshold for B component of blue and white color identifying sky
ST3B = maximum threshold for B component of blue and white color identifying sky
4.
maxI = 0;
GSkySegmentedImage = rgb2gray(SkySegmentedImage);
ROIImage = bwlabel(SkySegmentedImage);
Stats = regionprops(ROIImage, ‘Area’);
idx = find([stats.Area] > AT;
BW2 = ismember(labelmatrix(ROIImage), idx);
for(int i= 1; i <= idx; i++)
if maxI < idx(i).Area
maxI = idx(i);
end
ROI = ismember(labelmatrix(ROIImage), maxI);
AT = minimum threshold for size of ROI Area
5.
For(int i = 2; i< w − 1; i++)
For(int j = 2; j < h − 1; j+++)
average =round {[ p(i,j) + p(i − 1,j) + p(I + 1,j) + p(i,j − 1) + p(i,j + 1) + p(i − 1,j − 1) + p(i − 1,j + 1) + p(i+1,j − 1)
+ p(I + 1,j + 1)]/9};
If(abs(average – p(I,j)) < HR
HImage(i,j) = ROI(i,j);
else
HImage = 0;
end
end
end
HImage2 = bwlabel(HImage);
Stats = regionprops(HImage2, ‘Area’);
idx = find([stats.Area] > AT;
BW2 = ismember(labelmatrix(HImage2), idx);
for(int i= 1; i <= idx; i++)
if maxI < idx(i).Area
maxI = idx(i);
end
FinalHImage = ismember(labelmatrix(HImage2), maxI);
HR = Homogeneity Threshold
EImage = entropyfilt(ROI);
For(int i = 1; i< w; i++)
For(int j = 1; j < h; j+++)
If(EImage(i,j) > ET1 and EImage(i,j) < ET2)
EImage2(i,j) = ROI(i,j);
else
EImage2(i,j) = 0;
end
end
end
ET1 = minimum threshold for Entropy, expressed as a percentage of maximum Entropy Value in Image
ET2 = maximum threshold for Entropy, expressed as a percentage of maximum Entropy Value in Image
PSDImage = log10(abs(fftshif(fft2(ROI))).^2));
For(int i = 1; i< w; i++)
For(int j = 1; j < h; j+++)
If(PSDImage(i,j) > PSDT1 and PSDImage(i,j) < PSDT2)
PSDImage2(i,j) = ROI(i,j);
else
PSDImage2(i,j) = 0;
end
end
end
PSDT1 = minimum threshold for PSD, expressed as a percentage of maximum PSD Value in Image
PSDT2 = maximum threshold for PSD, expressed as a percentage of maximum PSD Value in Image
6.
For(int i = 1; i< w; i++)
For(int j = 1; j < h; j+++)
If (FinalHImage(i,j) > 0) || (EImage2(i,j) > 0)
ROHE(i,j) = ROI(i,j);
else
ROHE(i,j) = 0;
end
end
end
ROHEmean = mean(mean(ROHE));
For(int i = 1; i< w; i++)
For(int j = 1; j < h; j+++)
If (PSDImage2(i,j) > ROHEmean)
TPSDImage(i,j) = PSDImage2(i,j);
else
TPSDImage(i,j) = 0;
end
end
end
For(int i = 1; i< w; i++)
For(int j = 1; j < h; j+++)
If (ROHE(i,j) > 0) || (TPSDImage(i,j) > 0)
OilSpill(i,j) = ROI(i,j);
else
OilSpill(i,j) = 0;
end
end
end
References
- Chang, S.E.; Stone, J.; Demes, K.; Piscitelli, M. Consequences of oil spills: A review and framework for informing planning. Ecol. Soc. 2014, 19, 26. [Google Scholar] [CrossRef]
- D’Andrea, M.A.; Kesava, G.R. Health Consequences among Subjects Involved in Gulf Oil Spill Clean-up Activities. Am. J. Med. 2013, 126, 966–974. [Google Scholar] [CrossRef] [PubMed]
- Oyebamiji, M.A.; Mba, I.C. Effects of Oil Spillage on Community Development in the Niger Delta Region: Implications for the Eradication of Poverty and Hunger (Millennium Development Goal One) in Nigeria. World J. Soc. Sci. 2014, 1, 27–36. [Google Scholar]
- Okoye, C.O.; Okunrobo, L.A. Impact of Oil Spill on Land and Water and its Health Implications in Odugboro Community, Sagamu, Ogun State, Nigeria. World J. Environ. Sci. Eng. 2014, 1, 1–21. [Google Scholar]
- Zaki, M.S.; Authman, M.M.N.; Ata, N.S. Effects of Environmental Oil Spills on Commercial Fish and Shellfish in Suez Canal and Suez Gulf Regions. Life Sci. J. 2014, 11, 269–274. [Google Scholar]
- Oyem, I.L. Effects of Crude Oil Spillage on Soil Physico-Chemical Properties in Ugborodo Community. Int. J. Mod. Eng. Res. 2013, 3, 3336–3342. [Google Scholar]
- Mogborukor, J.O.A. The Impact of Oil Exploration and Exploitation on Water Quality and Vegetal Resources in a Rain Forest Ecosystem of Nigeria. Mediterr. J. Soc. Sci. 2014, 5, 1678–1685. [Google Scholar] [CrossRef]
- Kadafa, A.A. Oil Exploration and Spillage in the Niger Delta of Nigeria. Civ. Environ. Res. 2012, 2, 38–51. [Google Scholar]
- Melanie, D. Exxon Valdez Oil Spill Continued Effects on the Alaskan Economy. Colon. Acad. Alliance Undergrad. Res. J. 2010, 1, 7. [Google Scholar]
- Nwachukwu, A.N.; Osuagwu, J.C. Effects of Oil Spillage on Groundwater Quality in Nigeria. Am. J. Eng. Res. 2014, 3, 271–274. [Google Scholar]
- Etkin, D.S. Analysis of U.S. Oil Spillage. Available online: http://www.api.org/environmenthealth-and-safety/clean-water/oil-spill-prevention-and-response/~/media/93371edfb94c4b4d9c6bbc766f0c4a40.ashx (accessed on 13 June 2016).
- Statistical Summary Pipeline Occurrences 2014. Available online: http://www.tsb.gc.ca/eng/stats/pipeline/2014/ssep-sspo-2014.asp (accessed on 13 July 2016).
- Nigerian Oil Industry Annual Statistics Bulletin 2012. Department of Petroleum Resources. Available online: https://dpr.gov.ng/index/wp-content/uploads/2014/10/2012-INDUSTRY-STATISTICAL-BULLETIN.pdf (accessed on 13 July 2016).
- Ormseth, O.A.; Ben-David, M. Ingestion of crude oil: Effects on digesta retention times and nutrient uptake in captive river otters. J. Comp. Physiol. 2000, 170, 419–428. [Google Scholar] [CrossRef]
- Rogers, V.V.; Wickstrom, M.; Liber, K.; MacKinnon, M.D. Acute and subchronic mammalian toxicity of naphthenic acids from oil sands tailings. Toxicol. Sci. 2002, 66, 347–355. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.Y.C.; Rengasamy, A.; Frazer, D.; Barger, M.W.; Hubbs, A.F.; Battelli, L.; Tomblyn, S.; Stone, S.; Castranova, V. Inhalation exposure of rats to asphalt fumes generated at paving temperatures alters pulmonary xenobiotic metabolism pathways without lung injury. Environ. Health Perspect. 2003, 111, 1215–1221. Available online: http://www.ncbi.nlm.nih.gov/pmc/articles/PMC1241577/ (accessed on 13 July 2016). [CrossRef] [PubMed]
- Kazlauskiene, N.; Vosyliene, M.Z.; Ratkelyte, E. The comparative study of the overall effect of crude oil on fish in early stages of development. In Dangerous Pollutants (Xenobiotics) in Urban Water Cycle, Proceedings of the NATO Advanced Research Workshop on Dangerous Pollutants (Xenobiotics) in Urban Water Cycle, Lednice, Czech Republic, 3–6 May 2007; Hlavinek, P., Bonacci, O., Marsalek, J., Mahrikova, I., Eds.; Springer: Amsterdam, The Netherlands, 2007; pp. 307–316. [Google Scholar]
- Incardona, J.P.; Carls, M.G.; Day, H.L.; Sloan, C.A.; Bolton, J.L.; Collier, T.K.; Scholz, N.L. Cardiac arrhythmia is the primary response of embryonic Pacific herring (Clupea pallasi) exposed to crude oil during weathering. Environ. Sci. Technol. 2009, 43, 201–207. [Google Scholar] [CrossRef] [PubMed]
- Aguilera, F.; Mendez, J.; Pasaro, E.; Laffon, B. Review on the effects of exposure to spilled oils on human health. J. Appl. Toxicol. 2010, 30, 291–301. [Google Scholar] [CrossRef] [PubMed]
- Judson, R.S.; Martin, M.T.; Reif, D.M.; Houck, K.A.; Knudsen, T.B.; Rotroff, D.M.; Xia, M.; Sakamuru, S.; Huang, R.; Shinn, P.; et al. Analysis of Eight Oil Spill Dispersants Using Rapid, In Vitro Tests for Endocrine and Other Biological Activity. Environ. Sci. Technol. 2010, 44, 5979–5985. [Google Scholar] [CrossRef] [PubMed]
- Major, D.N.; Wang, H. How public health impact is addressed: A retrospective view on three different oil spills. Toxicol. Environ. Chem. 2012, 94, 442–467. [Google Scholar] [CrossRef]
- Chindah, C.A.; Braide, A.S. The Impact of Oil Spills on the Ecology and Economy of the Niger Delta. In Proceedings of the Workshop on Sustainable Remediation Development Technology; Institute of Pollution Studies, River State University of Science and Technology: Port-Harcourt, Nigeria, 2000. [Google Scholar]
- Inoni, O.; Douglason, E.; Omotor, G.; Adun, F.N. The Effect of Oil Spillage on Crop Yield and Farm Income in Delta State, Nigeria. J. Cent. Eur. Agric. 2006, 7, 41–48. Available online: https://jcea.agr.hr/articles/315_THE_EFFECT_OF_OIL_SPILLAGE_ON_CROP_YIELD_AND_FARM_INCOME_IN_DELTA_STATE_NIGERIA_en.pdf (accessed on 13 July 2016).
- Zabbey, N. Impacts of Oil Pollution on Livelihoods in Nigeria. In Proceedings of the Confenrence on Petroleum and Pollution—How Does That Impact Human Rights? Amnesty International, Friends of the Earth: Stockholm, Sweden, 2010; Available online: http://www.cehrd.org/files/Oil_and_livelihoods_in_the_Niger_Delta.pdf (accessed on 13 July 2016).
- Gay, J.; Shepherd, O.; Whitman, M.; Thyden, M. The Health Effects of Oil Contamination: A Compilation of Research. Worcester Polytechnic Institute, 2010. Available online: https://web.wpi.edu/Pubs/E-project/Available/E-project-121510-203112/unrestricted/Health_Effects_of_Oil_Contamination_-_Final_Report.pdf (accessed on 13 July 2015).
- Salako, A.; Oluwafolahan, S.; Sunkanmi, A. Oil Spills and Community Health: Implications for Resource Limited Settings. J. Toxicol. Environ. Health Sci. 2012, 4, 145–150. [Google Scholar] [CrossRef]
- Rodriguez-Trigo, G.; Zock, J.P.; Montes, I.I. Health effects of exposure to oil spills. Arch. Bronconeumol. 2007, 43, 628–635. [Google Scholar] [CrossRef]
- Zock, J.P.; Rodriguez-Trigo, G.; Pozo-Rodriguez, F.; Barbera, J.A.; Bouso, L.; Torralba, Y.; Anto, J.M.; Gomez, F.P.; Fuster, C.; Verea, H. Prolonged respiratory symptoms in clean-up workers of the Prestige oil spill. Am. J. Respir. Crit. Care Med. 2007, 176, 610–616. [Google Scholar] [CrossRef] [PubMed]
- Nigerian National Petroleum Company. Annual Statistical Bulletin. 2014. Available online: http://www.nnpcgroup.com/PublicRelations/OilandGasStatistics/AnnualStatisticsBulletin.aspx (accessed on 13 July 2016).
- Krisberg, K. Effect on Workers. Available online: http://thenationshealth.aphapublications.org/content/40/6/1.1.full (accessed on 10 September 2015).
- Shirvany, R.; Chabert, M.; Tourneret, J. Ship and Oil-Spill Detection Using the Degree of Polarization in Linear and Hybrid/Compact Dual-Pol SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 885–892. [Google Scholar] [CrossRef]
- Brekke, C.; Solberg, A.H.S. Oil Spill Detection by Satellite Remote Sensing. Remote Sens. Environ. 2005, 95, 1–13. [Google Scholar] [CrossRef]
- Li, H.; Shen, C. Object-Respecting Color Image Segmentation. In Proceedings of the IEEE International Conference on Image Processing, San Antonio, TX, USA, 16 September–19 September 2007. [Google Scholar] [CrossRef]
- Allili, M.S.; Ziou, D. An automatic Segmentation of Color Images by Using a Combination of Mixture Modelling and adaptive Region Information: A level set approach. In Proceedings of the IEEE International Conference on Image Processing, Genova, Italy, 11–14 September 2005. [Google Scholar] [CrossRef]
- Cossu, R.; Chiappini, L. A Color Image Segmentation Method as used in the study of ancient monument decay. J. Cult. Heritage 2005, 5, 385–391. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. SMC 1978, 8, 62–66. [Google Scholar] [CrossRef]
- Canny, J. A computational approach to edge detection. IEEE Trans. PAMI 1986, 8, 679–698. [Google Scholar] [CrossRef]
- Boroujeni, N.S.; Eternad, S.A.; Whitehead, A. Robust Horizon Detection Using Segmentation for UAV Applications. In Proceedings of the 9th Conference on Computer and Robot Vision (CRV), Toronto, ON, Canada, 28–30 May 2012. [Google Scholar] [CrossRef]
- Topouzelis, K.N. Oil Spill Detection by SAR Images: Dark Formation Detection, Feature Extraction and Classification Algorithms. Sensors 2008, 8, 6642–6659. [Google Scholar] [CrossRef] [PubMed]
- Solberg, A.; Storvik, G.; Solberg, R.; Volden, E. Automatic Detection of Oil Spills in ERS SAR Images. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1916–1924. [Google Scholar] [CrossRef]
- Del Frate, F.; Petrocchi, A.; Lichtenegger, J.; Calabresi, G. Neural networks for oil spill detection using ERS-SAR data. IEEE Trans. Geosci. Remote Sens. 2000, 5, 2282–2287. [Google Scholar] [CrossRef]
- Espedal, H.A.; Wahl, T. Satellite SAR oil spill detection using wind history information. Int. J. Remote Sens. 1999, 20, 49–65. [Google Scholar] [CrossRef]
- Espedal, H.A.; Johannessen, J.A. Detection of oil spills near offshore installations using synthetic aperture radar (SAR). Int. J. Remote Sens. 2000, 11, 2141–2144. [Google Scholar] [CrossRef]
- Fiscella, B.; Giancaspro, A.; Nirchio, F.; Trivero, P. Oil Spill Detection using Marine SAR Images. Int. J. Remote Sens. 2000, 21, 3561–3566. [Google Scholar] [CrossRef]
- De Souza, D.; Neto, A.; Da Mata, W. Intelligent System for Feature Extraction of Oil Slicks in SAR Images: Speckle Filter Analysis. In Proceedings of the 13th International Conference on Neural Information Processing (ICONIP 2006), Hong Kong, China, 3–6 October 2006. [Google Scholar]
- Serra-Sogas, N.; O’Hara, P.D.; Canessa, R.; Keller, P.; Pelot, R. Visualization of Spatial Patterns and Temporal Trends for Aerial Surveillance of Illegal Oil Discharges in Western Canadian Marine Waters. Mar. Pollut. Bull. 2008, 56, 825–833. [Google Scholar] [CrossRef] [PubMed]
- Shell Nigeria. Available online: www.shell.com.ng (accessed on 13 July 2016).
- Ejofodomi, O.; Ofualagba, G. Exploring the Feasibility of Robotic Pipelilne Surveillance for Detecting Crude Oil Spills in the Niger Delta. Int. J. Unmanned Syst. Eng. 2017, 5, 8–52. [Google Scholar] [CrossRef]
- Ejofodomi, O.; Ofualagba, G. Development of an Aerial Robotic Oil Spill Surveillance (AROSS) System for Constant Surveillance and Detection of Spills from Crude Oil Pipelines. Int. J. Unmanned Syst. Eng. 2016, 4, 19–33. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample Image No. | Successful Spill Detection | No. of False Positives (FP) |
|---|---|---|
| OS1 | YES | 0 |
| OS2 | YES | 0 |
| OS5 | YES | 4 |
| OS7 | YES | 0 |
| OS8 | YES | 0 |
| OS9 | NO | 0 |
| OS10 | YES | 2 |
| OS11 | YES | 2 |
| OS14 | YES | 1 |
| OS18 | YES | 3 |
| OS19 | YES | 0 |
| OS20 | YES | 0 |
| OS21 | YES | 0 |
| OS22 | YES | 2 |
| OS23 | YES | 0 |
| OS25 | NO | 0 |
| OS2b | YES | 1 |
| OS5b | YES | 7 |
| OS9b | YES | 3 |
| OS12b | YES | 5 |
| OS16b | YES | 1 |
| OS19b | YES | 0 |
| OS20b | YES | 2 |
| OS22b | YES | 0 |
| OS24b | YES | 0 |
| Sample Image No. | Successful Spill Detection | No. of False Positives (FP) |
|---|---|---|
| OS26 | YES | 2 |
| OS27 | YES | 1 |
| OS28 | YES | 0 |
| OS28b | NO | 0 |
| OS29 | YES | 0 |
| OS31 | NO | 1 |
| OS32 | YES | 1 |
| OS32b | YES | 0 |
| OS33 | YES | 0 |
| OS34 | NO | 2 |
| OS34b | YES | 1 |
| OS35 | YES | 0 |
| OS36 | YES | 3 |
| OS36b | YES | 1 |
| OS37 | YES | 1 |
| OS38 | YES | 2 |
| OS38b | YES | 2 |
| OS38c | YES | 3 |
| OS39 | YES | 0 |
| OS40 | YES | 0 |
| OS41 | NO | 0 |
| OS42 | YES | 1 |
| OS42b | YES | 0 |
| OS43 | YES | 3 |
| OS44 | YES | 0 |
| OS46 | NO | 0 |
| OS48 | NO | 0 |
| OS48b | YES | 1 |
| OS49 | YES | 0 |
| OS49b | YES | 0 |
| OS50 | YES | 0 |
| OS51 | YES | 0 |
| OS52 | YES | 0 |
| OS53 | NO | 3 |
| OS54 | YES | 0 |
| OS55 | YES | 0 |
| OS56 | YES | 0 |
| OS57 | YES | 0 |
| OS58 | YES | 0 |
| OS59 | YES | 0 |
| OS60 | YES | 1 |
| OS61 | NO | 2 |
| OS61b | YES | 1 |
| OS62 | NO | 0 |
| OS63 | YES | 1 |
| OS63b | YES | 0 |
| OS64 | YES | 1 |
| OS65b | YES | 1 |
| OS67 | YES | 1 |
| OS68 | YES | 0 |
| OS69 | YES | 0 |
| OS69b | YES | 1 |
| OS70 | NO | 0 |
| OS71 | YES | 0 |
| OS74 | YES | 2 |
| OS75 | YES | 0 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ejofodomi, O.; Ofualagba, G. Detection and Classification of Land Crude Oil Spills Using Color Segmentation and Texture Analysis. J. Imaging 2017, 3, 47. https://doi.org/10.3390/jimaging3040047
Ejofodomi O, Ofualagba G. Detection and Classification of Land Crude Oil Spills Using Color Segmentation and Texture Analysis. Journal of Imaging. 2017; 3(4):47. https://doi.org/10.3390/jimaging3040047
Chicago/Turabian StyleEjofodomi, O’tega, and Godswill Ofualagba. 2017. "Detection and Classification of Land Crude Oil Spills Using Color Segmentation and Texture Analysis" Journal of Imaging 3, no. 4: 47. https://doi.org/10.3390/jimaging3040047
APA StyleEjofodomi, O., & Ofualagba, G. (2017). Detection and Classification of Land Crude Oil Spills Using Color Segmentation and Texture Analysis. Journal of Imaging, 3(4), 47. https://doi.org/10.3390/jimaging3040047