
Multi-Modal Convolutional Parameterisation Network for Guided Image Inverse Problems

 ,
,  , ,
, ,  ,
, 
 , , and
, , and 
Abstract
1. Introduction
2. Method Description
2.1. Framework Configuration
2.2. Convergence Detection
3. Evaluation
3.1. Guided Satellite Image Inpainting
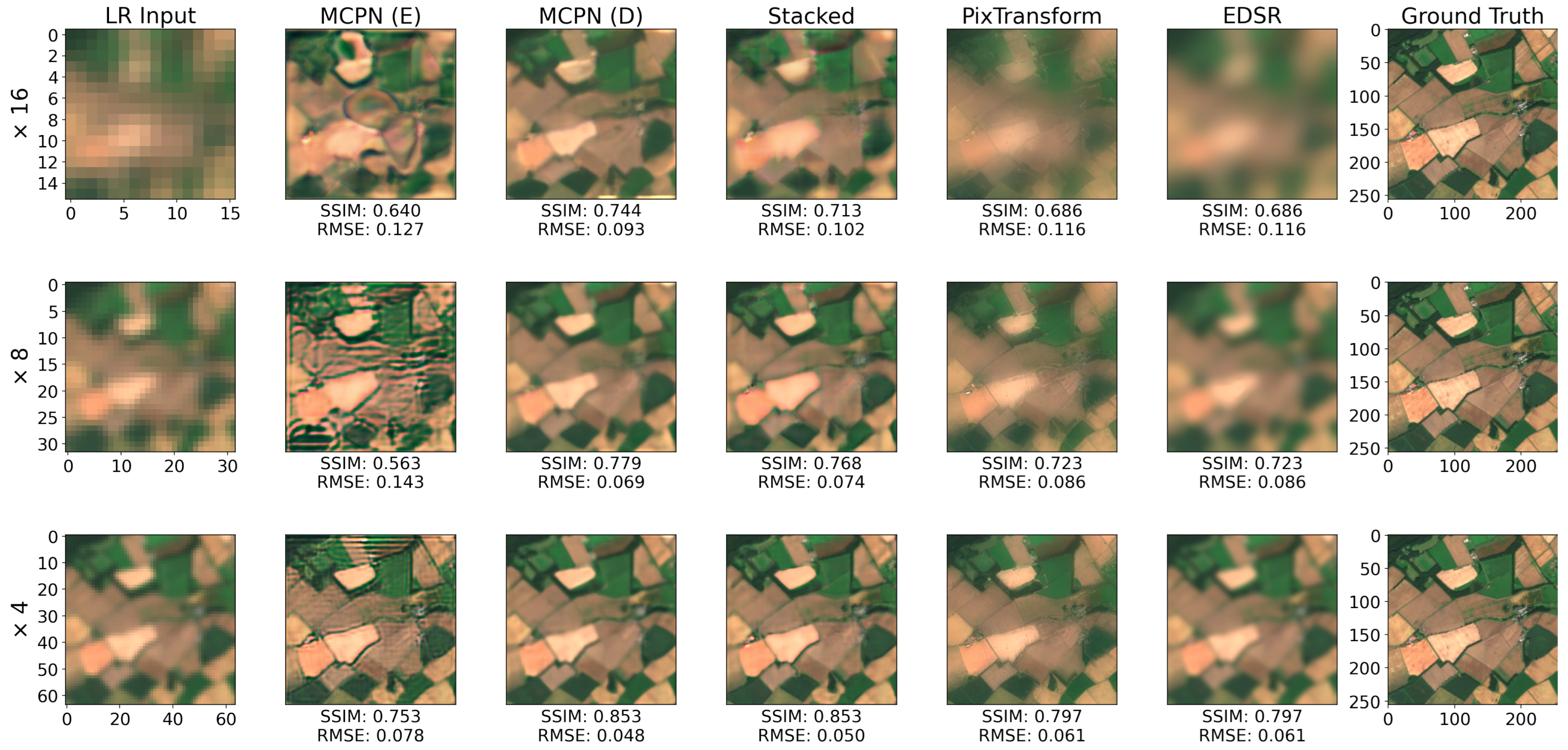
3.2. Guided Satellite Image Super-Resolution
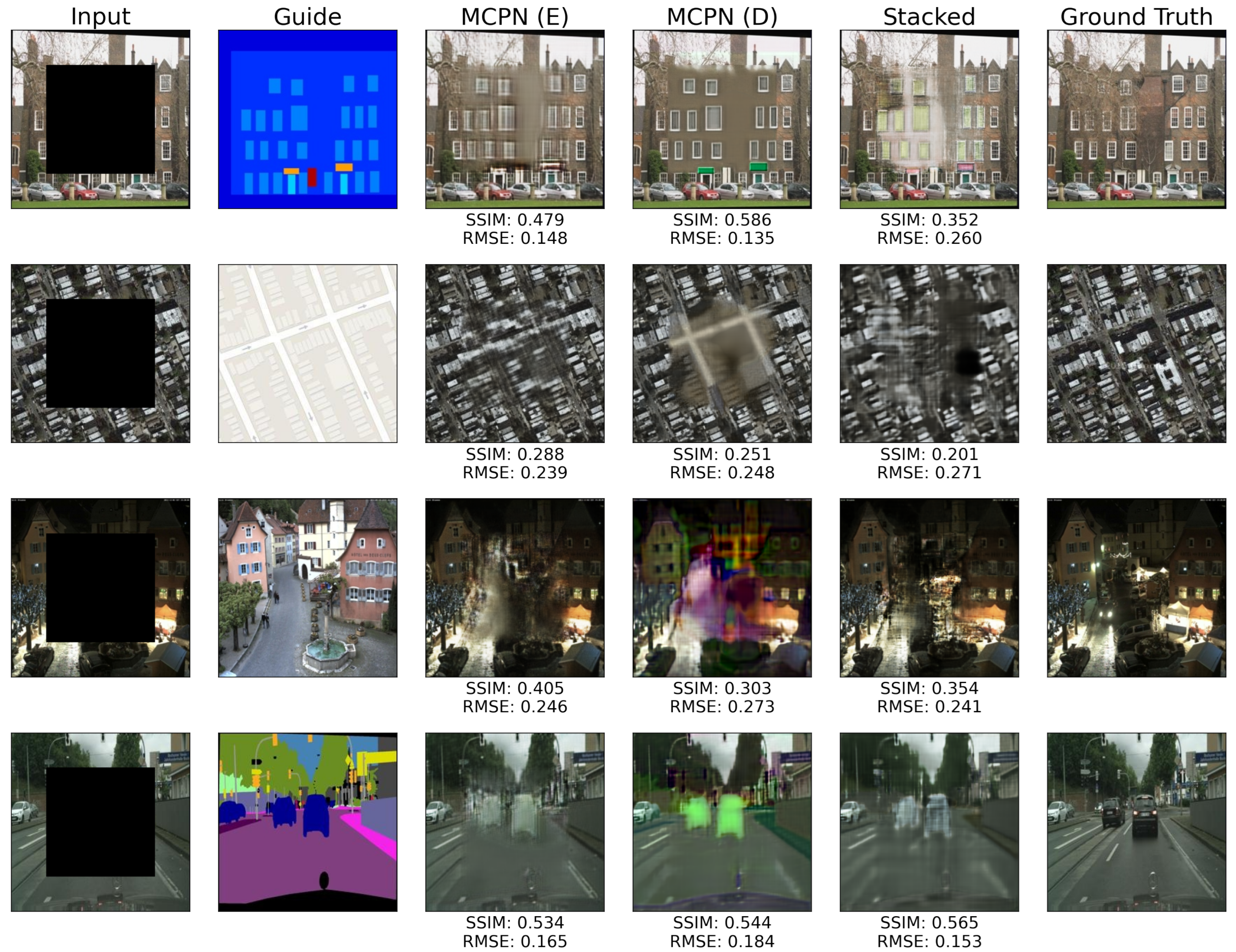
3.3. Guided Image Inpainting in Other Domains
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MCPN | Multi-modal Convolutional Parameterisation Network |
| SAR | Synthetic Aperture Radar |
| DIP | Deep Image Prior |
Appendix A. Convergence Detection
Appendix A.1. Satellite Inpainting

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Guidance | MCPN (Emergent Core) | MCPN (Direct Core) | Stacked | ||
|---|---|---|---|---|---|
| Current Sentinel-1 | Whole | SSIM ↑ | 0.833 ± 0.065 | 0.824 ± 0.045 | 0.837 ± 0.063 |
| RMSE ↓ | 0.113 ± 0.104 | 0.081 ± 0.033 | 0.086 ± 0.050 | ||
| Inpainting | SSIM ↑ | 0.604 ± 0.170 | 0.601 ± 0.068 | 0.576 ± 0.080 | |
| RMSE ↓ | 0.203 ± 0.186 | 0.140 ± 0.055 | 0.149 ± 0.071 | ||
| Historical Sentinel-2 | Whole | SSIM ↑ | 0.857 ± 0.070 | 0.864 ± 0.041 | 0.875 ± 0.063 |
| RMSE ↓ | 0.119 ± 0.106 | 0.075 ± 0.028 | 0.086 ± 0.059 | ||
| Inpainting | SSIM ↑ | 0.654 ± 0.191 | 0.692 ± 0.075 | 0.703 ± 0.105 | |
| RMSE ↓ | 0.217 ± 0.190 | 0.131 ± 0.044 | 0.147 ± 0.089 | ||
| Current Sentinel-1 + Historical Sentinel-2 | Whole | SSIM ↑ | 0.855 ± 0.060 | 0.861 ± 0.039 | 0.879 ± 0.055 |
| RMSE ↓ | 0.091 ± 0.095 | 0.071 ± 0.032 | 0.074 ± 0.049 | ||
| Inpainting | SSIM ↑ | 0.700 ± 0.169 | 0.679 ± 0.070 | 0.713 ± 0.100 | |
| RMSE ↓ | 0.158 ± 0.170 | 0.124 ± 0.054 | 0.128 ± 0.076 |
| Guidance | MCPN (Emergent Core) | MCPN (Direct Core) | Stacked | ||
|---|---|---|---|---|---|
| Current Sentinel-1 | Whole | SSIM ↑ | 0.850 ± 0.051 | 0.830 ± 0.050 | 0.839 ± 0.059 |
| RMSE ↓ | 0.089 ± 0.071 | 0.081 ± 0.032 | 0.084 ± 0.047 | ||
| Inpainting | SSIM ↑ | 0.621 ± 0.108 | 0.588 ± 0.069 | 0.564 ± 0.082 | |
| RMSE ↓ | 0.159 ± 0.124 | 0.141 ± 0.053 | 0.149 ± 0.077 | ||
| Historical Sentinel-2 | Whole | SSIM ↑ | 0.874 ± 0.054 | 0.872 ± 0.052 | 0.887 ± 0.050 |
| RMSE ↓ | 0.089 ± 0.077 | 0.076 ± 0.031 | 0.079 ± 0.055 | ||
| Inpainting | SSIM ↑ | 0.689 ± 0.135 | 0.690 ± 0.082 | 0.706 ± 0.105 | |
| RMSE ↓ | 0.158 ± 0.133 | 0.133 ± 0.046 | 0.139 ± 0.093 | ||
| Current Sentinel-1 + Historical Sentinel-2 | Whole | SSIM ↑ | 0.873 ± 0.048 | 0.867 ± 0.053 | 0.887 ± 0.047 |
| RMSE ↓ | 0.077 ± 0.069 | 0.073 ± 0.036 | 0.070 ± 0.044 | ||
| Inpainting | SSIM ↑ | 0.721 ± 0.122 | 0.669 ± 0.071 | 0.713 ± 0.093 | |
| RMSE ↓ | 0.134 ± 0.120 | 0.128 ± 0.054 | 0.123 ± 0.071 |
| Guidance | MCPN (Emergent Core) | MCPN (Direct Core) | Stacked | ||
|---|---|---|---|---|---|
| Current Sentinel-1 | Whole | SSIM ↑ | 0.859 ± 0.041 | 0.834 ± 0.061 | 0.849 ± 0.060 |
| RMSE ↓ | 0.079 ± 0.048 | 0.086 ± 0.034 | 0.080 ± 0.045 | ||
| Inpainting | SSIM ↑ | 0.638 ± 0.081 | 0.532 ± 0.071 | 0.538 ± 0.079 | |
| RMSE ↓ | 0.141 ± 0.082 | 0.153 ± 0.050 | 0.146 ± 0.073 | ||
| Historical Sentinel-2 | Whole | SSIM ↑ | 0.880 ± 0.043 | 0.885 ± 0.048 | 0.896 ± 0.048 |
| RMSE ↓ | 0.079 ± 0.051 | 0.080 ± 0.029 | 0.075 ± 0.050 | ||
| Inpainting | SSIM ↑ | 0.698 ± 0.107 | 0.670 ± 0.079 | 0.701 ± 0.094 | |
| RMSE ↓ | 0.142 ± 0.089 | 0.143 ± 0.040 | 0.133 ± 0.080 | ||
| Current Sentinel-1 + Historical Sentinel-2 | Whole | SSIM ↑ | 0.882 ± 0.036 | 0.882 ± 0.045 | 0.896 ± 0.046 |
| RMSE ↓ | 0.069 ± 0.048 | 0.073 ± 0.031 | 0.068 ± 0.042 | ||
| Inpainting | SSIM ↑ | 0.735 ± 0.096 | 0.654 ± 0.064 | 0.703 ± 0.091 | |
| RMSE ↓ | 0.120 ± 0.087 | 0.132 ± 0.049 | 0.122 ± 0.067 |
Appendix A.2. Guided Super-Resolution
| Factor | MCPN (Emergent Core) | MCPN (Direct Core) | Stacked | PixTransform [34] | EDSR | |
|---|---|---|---|---|---|---|
| ×16 | SSIM ↑ | 0.641 ± 0.090 | 0.735 ± 0.068 | 0.731 ± 0.066 | 0.718 ± 0.060 | 0.699 ± 0.055 |
| RMSE ↓ | 0.140 ± 0.064 | 0.085 ± 0.047 | 0.090 ± 0.052 | 0.094 ± 0.046 | 0.098 ± 0.045 | |
| ×8 | SSIM ↑ | 0.716 ± 0.088 | 0.782 ± 0.049 | 0.783 ± 0.072 | 0.758 ± 0.052 | 0.727 ± 0.050 |
| RMSE ↓ | 0.098 ± 0.057 | 0.064 ± 0.029 | 0.071 ± 0.050 | 0.076 ± 0.039 | 0.080 ± 0.040 | |
| ×4 | SSIM ↑ | 0.783 ± 0.085 | 0.848 ± 0.029 | 0.840 ± 0.070 | 0.815 ± 0.044 | 0.789 ± 0.038 |
| RMSE ↓ | 0.075 ± 0.047 | 0.047 ± 0.017 | 0.055 ± 0.044 | 0.061 ± 0.031 | 0.061 ± 0.031 |
| Factor | MCPN (Emergent Core) | MCPN (Direct Core) | Stacked | PixTransform [34] | EDSR | |
|---|---|---|---|---|---|---|
| ×16 | SSIM ↑ | 0.487 ± 0.137 | 0.710 ± 0.062 | 0.719 ± 0.072 | 0.718 ± 0.060 | 0.699 ± 0.055 |
| RMSE ↓ | 0.184 ± 0.057 | 0.091 ± 0.047 | 0.094 ± 0.060 | 0.094 ± 0.046 | 0.098 ± 0.045 | |
| ×8 | SSIM ↑ | 0.584 ± 0.168 | 0.748 ± 0.047 | 0.771 ± 0.085 | 0.758 ± 0.052 | 0.727 ± 0.050 |
| RMSE ↓ | 0.135 ± 0.067 | 0.071 ± 0.032 | 0.076 ± 0.061 | 0.076 ± 0.039 | 0.080 ± 0.040 | |
| ×4 | SSIM ↑ | 0.685 ± 0.137 | 0.809 ± 0.031 | 0.825 ± 0.084 | 0.815 ± 0.044 | 0.789 ± 0.038 |
| RMSE ↓ | 0.104 ± 0.068 | 0.054 ± 0.019 | 0.062 ± 0.057 | 0.061 ± 0.031 | 0.061 ± 0.031 |
| Factor | MCPN (Emergent Core) | MCPN (Direct Core) | Stacked | PixTransform [34] | EDSR | |
|---|---|---|---|---|---|---|
| ×16 | SSIM ↑ | 0.410 ± 0.169 | 0.728 ± 0.068 | 0.695 ± 0.078 | 0.718 ± 0.060 | 0.699 ± 0.055 |
| RMSE ↓ | 0.212 ± 0.075 | 0.087 ± 0.047 | 0.102 ± 0.071 | 0.094 ± 0.046 | 0.098 ± 0.045 | |
| ×8 | SSIM ↑ | 0.605 ± 0.137 | 0.780 ± 0.049 | 0.758 ± 0.086 | 0.758 ± 0.052 | 0.727 ± 0.050 |
| RMSE ↓ | 0.131 ± 0.072 | 0.065 ± 0.029 | 0.080 ± 0.065 | 0.076 ± 0.039 | 0.080 ± 0.040 | |
| ×4 | SSIM ↑ | 0.720 ± 0.160 | 0.845 ± 0.030 | 0.830 ± 0.091 | 0.815 ± 0.044 | 0.789 ± 0.038 |
| RMSE ↓ | 0.104 ± 0.115 | 0.047 ± 0.017 | 0.059 ± 0.053 | 0.061 ± 0.031 | 0.061 ± 0.031 |
| Factor | MCPN (Emergent Core) | MCPN (Direct Core) | Stacked | PixTransform [34] | EDSR | |
|---|---|---|---|---|---|---|
| ×16 | SSIM ↑ | 0.389 ± 0.180 | 0.733 ± 0.068 | 0.695 ± 0.078 | 0.718 ± 0.060 | 0.699 ± 0.055 |
| RMSE ↓ | 0.213 ± 0.081 | 0.085 ± 0.047 | 0.102 ± 0.071 | 0.094 ± 0.046 | 0.098 ± 0.045 | |
| ×8 | SSIM ↑ | 0.541 ± 0.201 | 0.782 ± 0.049 | 0.759 ± 0.089 | 0.758 ± 0.052 | 0.727 ± 0.050 |
| RMSE ↓ | 0.150 ± 0.081 | 0.064 ± 0.029 | 0.081 ± 0.070 | 0.076 ± 0.039 | 0.080 ± 0.040 | |
| ×4 | SSIM ↑ | 0.674 ± 0.154 | 0.847 ± 0.029 | 0.829 ± 0.096 | 0.815 ± 0.044 | 0.789 ± 0.038 |
| RMSE ↓ | 0.100 ± 0.068 | 0.047 ± 0.017 | 0.060 ± 0.056 | 0.061 ± 0.031 | 0.061 ± 0.031 |
Appendix A.3. Other Tasks
| Guidance | MCPN (Emergent Core) | MCPN (Direct Core) | Stacked | ||
|---|---|---|---|---|---|
| Facades (Segmentation → Building) | Whole | SSIM ↑ | 0.754 ± 0.062 | 0.761 ± 0.100 | 0.702 ± 0.115 |
| RMSE ↓ | 0.107 ± 0.030 | 0.106 ± 0.034 | 0.109 ± 0.035 | ||
| Inpainting | SSIM ↑ | 0.496 ± 0.104 | 0.532 ± 0.128 | 0.532 ± 0.123 | |
| RMSE ↓ | 0.169 ± 0.050 | 0.166 ± 0.050 | 0.158 ± 0.049 | ||
| Maps (Map → Aerial) | Whole | SSIM ↑ | 0.792 ± 0.069 | 0.733 ± 0.118 | 0.607 ± 0.152 |
| RMSE ↓ | 0.082 ± 0.031 | 0.084 ± 0.030 | 0.111 ± 0.041 | ||
| Inpainting | SSIM ↑ | 0.533 ± 0.173 | 0.540 ± 0.168 | 0.499 ± 0.184 | |
| RMSE ↓ | 0.131 ± 0.051 | 0.124 ± 0.047 | 0.147 ± 0.062 | ||
| Night-to-Day (Day → Night) | Whole | SSIM ↑ | 0.868 ± 0.076 | 0.753 ± 0.116 | 0.807 ± 0.115 |
| RMSE ↓ | 0.072 ± 0.040 | 0.094 ± 0.035 | 0.081 ± 0.042 | ||
| Inpainting | SSIM ↑ | 0.727 ± 0.161 | 0.668 ± 0.141 | 0.729 ± 0.158 | |
| RMSE ↓ | 0.114 ± 0.064 | 0.129 ± 0.053 | 0.112 ± 0.065 | ||
| Cityscapes (Segmentation → Street) | Whole | SSIM ↑ | 0.830 ± 0.031 | 0.743 ± 0.050 | 0.747 ± 0.055 |
| RMSE ↓ | 0.086 ± 0.028 | 0.088 ± 0.018 | 0.083 ± 0.019 | ||
| Inpainting | SSIM ↑ | 0.625 ± 0.075 | 0.649 ± 0.066 | 0.672 ± 0.065 | |
| RMSE ↓ | 0.138 ± 0.046 | 0.120 ± 0.029 | 0.110 ± 0.030 |
| Guidance | MCPN (Emergent Core) | MCPN (Direct Core) | Stacked | ||
|---|---|---|---|---|---|
| Facades (Segmentation → Building) | Whole | SSIM ↑ | 0.763 ± 0.044 | 0.700 ± 0.076 | 0.720 ± 0.100 |
| RMSE ↓ | 0.108 ± 0.031 | 0.129 ± 0.035 | 0.118 ± 0.038 | ||
| Inpainting | SSIM ↑ | 0.476 ± 0.109 | 0.447 ± 0.132 | 0.453 ± 0.130 | |
| RMSE ↓ | 0.172 ± 0.051 | 0.200 ± 0.058 | 0.184 ± 0.061 | ||
| Maps (Map → Aerial) | Whole | SSIM ↑ | 0.759 ± 0.069 | 0.768 ± 0.074 | 0.744 ± 0.076 |
| RMSE ↓ | 0.112 ± 0.056 | 0.085 ± 0.030 | 0.113 ± 0.038 | ||
| Inpainting | SSIM ↑ | 0.472 ± 0.167 | 0.510 ± 0.175 | 0.404 ± 0.169 | |
| RMSE ↓ | 0.180 ± 0.093 | 0.134 ± 0.050 | 0.183 ± 0.061 | ||
| Night-to-Day (Day → Night) | Whole | SSIM ↑ | 0.804 ± 0.103 | 0.767 ± 0.092 | 0.823 ± 0.082 |
| RMSE ↓ | 0.157 ± 0.124 | 0.103 ± 0.038 | 0.113 ± 0.060 | ||
| Inpainting | SSIM ↑ | 0.570 ± 0.245 | 0.552 ± 0.171 | 0.605 ± 0.199 | |
| RMSE ↓ | 0.254 ± 0.205 | 0.164 ± 0.063 | 0.183 ± 0.100 | ||
| Cityscapes (Segmentation → Street) | Whole | SSIM ↑ | 0.822 ± 0.031 | 0.793 ± 0.041 | 0.802 ± 0.047 |
| RMSE ↓ | 0.093 ± 0.030 | 0.092 ± 0.023 | 0.093 ± 0.028 | ||
| Inpainting | SSIM ↑ | 0.613 ± 0.077 | 0.610 ± 0.071 | 0.608 ± 0.077 | |
| RMSE ↓ | 0.150 ± 0.050 | 0.143 ± 0.037 | 0.147 ± 0.047 |
| Guidance | MCPN (Emergent Core) | MCPN (Direct Core) | Stacked | ||
|---|---|---|---|---|---|
| Facades (Segmentation → Building) | Whole | SSIM ↑ | 0.764 ± 0.043 | 0.784 ± 0.058 | 0.771 ± 0.058 |
| RMSE ↓ | 0.112 ± 0.029 | 0.113 ± 0.040 | 0.110 ± 0.037 | ||
| Inpainting | SSIM ↑ | 0.446 ± 0.106 | 0.505 ± 0.144 | 0.437 ± 0.145 | |
| RMSE ↓ | 0.182 ± 0.048 | 0.183 ± 0.067 | 0.180 ± 0.061 | ||
| Maps (Map → Aerial) | Whole | SSIM ↑ | 0.791 ± 0.070 | 0.798 ± 0.069 | 0.756 ± 0.077 |
| RMSE ↓ | 0.085 ± 0.031 | 0.082 ± 0.029 | 0.098 ± 0.036 | ||
| Inpainting | SSIM ↑ | 0.512 ± 0.174 | 0.505 ± 0.172 | 0.389 ± 0.195 | |
| RMSE ↓ | 0.137 ± 0.051 | 0.134 ± 0.048 | 0.160 ± 0.059 | ||
| Night-to-Day (Day → Night) | Whole | SSIM ↑ | 0.870 ± 0.068 | 0.751 ± 0.080 | 0.842 ± 0.079 |
| RMSE ↓ | 0.075 ± 0.041 | 0.121 ± 0.040 | 0.097 ± 0.057 | ||
| Inpainting | SSIM ↑ | 0.709 ± 0.167 | 0.464 ± 0.159 | 0.620 ± 0.197 | |
| RMSE ↓ | 0.121 ± 0.067 | 0.196 ± 0.066 | 0.159 ± 0.094 | ||
| Cityscapes (Segmentation → Street) | Whole | SSIM ↑ | 0.831 ± 0.030 | 0.821 ± 0.029 | 0.825 ± 0.028 |
| RMSE ↓ | 0.088 ± 0.027 | 0.094 ± 0.021 | 0.084 ± 0.020 | ||
| Inpainting | SSIM ↑ | 0.604 ± 0.076 | 0.593 ± 0.069 | 0.569 ± 0.071 | |
| RMSE ↓ | 0.143 ± 0.045 | 0.153 ± 0.035 | 0.138 ± 0.033 |
| Guidance | MCPN (Emergent Core) | MCPN (Direct Core) | Stacked | ||
|---|---|---|---|---|---|
| Facades (Segmentation → Building) | Whole | SSIM ↑ | 0.759 ± 0.046 | 0.734 ± 0.091 | 0.740 ± 0.089 |
| RMSE ↓ | 0.113 ± 0.029 | 0.121 ± 0.039 | 0.122 ± 0.042 | ||
| Inpainting | SSIM ↑ | 0.450 ± 0.103 | 0.478 ± 0.138 | 0.442 ± 0.138 | |
| RMSE ↓ | 0.182 ± 0.048 | 0.189 ± 0.061 | 0.194 ± 0.065 | ||
| Maps (Map → Aerial) | Whole | SSIM ↑ | 0.774 ± 0.064 | 0.771 ± 0.088 | 0.751 ± 0.074 |
| RMSE ↓ | 0.102 ± 0.060 | 0.086 ± 0.030 | 0.101 ± 0.035 | ||
| Inpainting | SSIM ↑ | 0.478 ± 0.161 | 0.506 ± 0.170 | 0.392 ± 0.180 | |
| RMSE ↓ | 0.164 ± 0.099 | 0.134 ± 0.048 | 0.164 ± 0.058 | ||
| Night-to-Day (Day → Night) | Whole | SSIM ↑ | 0.851 ± 0.069 | 0.769 ± 0.093 | 0.828 ± 0.103 |
| RMSE ↓ | 0.085 ± 0.042 | 0.100 ± 0.038 | 0.096 ± 0.055 | ||
| Inpainting | SSIM ↑ | 0.672 ± 0.166 | 0.576 ± 0.148 | 0.644 ± 0.178 | |
| RMSE ↓ | 0.137 ± 0.069 | 0.157 ± 0.060 | 0.150 ± 0.076 | ||
| Cityscapes (Segmentation → Street) | Whole | SSIM ↑ | 0.825 ± 0.028 | 0.801 ± 0.034 | 0.820 ± 0.032 |
| RMSE ↓ | 0.094 ± 0.030 | 0.090 ± 0.020 | 0.093 ± 0.026 | ||
| Inpainting | SSIM ↑ | 0.598 ± 0.069 | 0.609 ± 0.067 | 0.592 ± 0.067 | |
| RMSE ↓ | 0.153 ± 0.050 | 0.142 ± 0.034 | 0.150 ± 0.042 |
References
- Gandelsman, Y.; Shocher, A.; Irani, M. “Double-DIP”: Unsupervised Image Decomposition via Coupled Deep-Image-Priors. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 11018–11027. [Google Scholar] [CrossRef]
- Ulyanov, D.; Vedaldi, A.; Lempitsky, V. Deep Image Prior. Int. J. Comput. Vis. 2020, 128, 1867–1888. [Google Scholar] [CrossRef]
- Yokoya, N.; Grohnfeldt, C.; Chanussot, J. Hyperspectral and Multispectral Data Fusion: A comparative review of the recent literature. IEEE Geosci. Remote Sens. Mag. 2017, 5, 29–56. [Google Scholar] [CrossRef]
- Shao, Z.; Cai, J. Remote Sensing Image Fusion With Deep Convolutional Neural Network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1656–1669. [Google Scholar] [CrossRef]
- Bermudez, J.D.; Happ, P.N.; Oliveira, D.A.; Feitosa, R.Q. SAR to Optical Image Synthesis for Cloud Removal with Generative Adversarial Networks. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 4, 5–11. [Google Scholar] [CrossRef]
- Singh, P.; Komodakis, N. Cloud-Gan: Cloud Removal for Sentinel-2 Imagery Using a Cyclic Consistent Generative Adversarial Networks. In Proceedings of the IGARSS 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 1772–1775. [Google Scholar] [CrossRef]
- Meraner, A.; Ebel, P.; Zhu, X.X.; Schmitt, M. Cloud removal in Sentinel-2 imagery using a deep residual neural network and SAR-optical data fusion. ISPRS J. Photogramm. Remote Sens. 2020, 166, 333–346. [Google Scholar] [CrossRef] [PubMed]
- Isola, P.; Zhu, J.Y.; Zhou, T.; Efros, A.A. Image-to-Image Translation with Conditional Adversarial Networks. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 5967–5976. [Google Scholar] [CrossRef]
- Shen, H.; Li, X.; Cheng, Q.; Zeng, C.; Yang, G.; Li, H.; Zhang, L. Missing Information Reconstruction of Remote Sensing Data: A Technical Review. IEEE Geosci. Remote Sens. Mag. 2015, 3, 61–85. [Google Scholar] [CrossRef]
- Zhang, Q.; Yuan, Q.; Zeng, C.; Li, X.; Wei, Y. Missing data reconstruction in remote sensing image with a unified spatial-temporal-spectral deep convolutional neural network. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4274–4288. [Google Scholar] [CrossRef]
- Kang, S.H.; Choi, Y.; Choi, J.Y. Restoration of missing patterns on satellite infrared sea surface temperature images due to cloud coverage using deep generative inpainting network. J. Mar. Sci. Eng. 2021, 9, 310. [Google Scholar] [CrossRef]
- Gao, J.; Yuan, Q.; Li, J.; Su, X. Unsupervised missing information reconstruction for single remote sensing image with Deep Code Regression. Int. J. Appl. Earth Obs. Geoinf. 2021, 105, 102599. [Google Scholar] [CrossRef]
- Ebel, P.; Schmitt, M.; Zhu, X.X. Internal Learning for Sequence-to-Sequence Cloud Removal via Synthetic Aperture Radar Prior Information. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 2691–2694. [Google Scholar] [CrossRef]
- Ebel, P.; Xu, Y.; Schmitt, M.; Zhu, X.X. SEN12MS-CR-TS: A Remote Sensing Data Set for Multi-modal Multi-temporal Cloud Removal. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5222414. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, C.; Wu, Y.; Luo, J. Remote sensing image cloud removal by deep image prior with a multitemporal constraint. Opt. Contin. 2022, 1, 215–226. [Google Scholar] [CrossRef]
- Czerkawski, M.; Upadhyay, P.; Davison, C.; Werkmeister, A.; Cardona, J.; Atkinson, R.; Michie, C.; Andonovic, I.; Macdonald, M.; Tachtatzis, C. Deep Internal Learning for Inpainting of Cloud-Affected Regions in Satellite Imagery. Remote Sens. 2022, 14, 1342. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L.; Mou, X.; Zhang, D. FSIM: A Feature Similarity Index for Image Quality Assessment. IEEE Trans. Image Process. 2011, 20, 2378–2386. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Li, Q. Information Content Weighting for Perceptual Image Quality Assessment. IEEE Trans. Image Process. 2011, 20, 1185–1198. [Google Scholar] [CrossRef] [PubMed]
- Golestaneh, S.A.; Dadsetan, S.; Kitani, K.M. No-Reference Image Quality Assessment via Transformers, Relative Ranking, and Self-Consistency. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 3–8 January 2022; pp. 3209–3218. [Google Scholar]
- Zhang, W.; Ma, K.; Zhai, G.; Yang, X. Uncertainty-aware blind image quality assessment in the laboratory and wild. IEEE Trans. Image Process. 2021, 30, 3474–3486. [Google Scholar] [CrossRef] [PubMed]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar] [CrossRef]
- Shaham, T.R.; Dekel, T.; Michaeli, T. SinGAN: Learning a Generative Model From a Single Natural Image. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 4569–4579. [Google Scholar] [CrossRef]
- Upadhyay, P.; Czerkawski, M.; Davison, C.; Cardona, J.; Macdonald, M.; Andonovic, I.; Michie, C.; Atkinson, R.; Papadopoulou, N.; Nikas, K.; et al. A Flexible Multi-Temporal and Multi-Modal Framework for Sentinel-1 and Sentinel-2 Analysis Ready Data. Remote Sens. 2022, 14, 1120. [Google Scholar] [CrossRef]
- Zaytar, M.A.; Amrani, C.E. Satellite image inpainting with deep generative adversarial neural networks. IAES Int. J. Artif. Intell. 2021, 10, 121–130. [Google Scholar] [CrossRef]
- Deng, Y.; Hui, S.; Wang, J. Image Inpainting with Bilateral Convolution. Remote Sens. 2022, 14, 6410. [Google Scholar]
- Suvorov, R.; Logacheva, E.; Mashikhin, A.; Remizova, A.; Ashukha, A.; Silvestrov, A.; Kong, N.; Goka, H.; Park, K.; Lempitsky, V. Resolution-robust Large Mask Inpainting with Fourier Convolutions. In Proceedings of the 2022 IEEE/CVF Winter Conference on Applications of Computer Vision, WACV 2022, Waikoloa, HI, USA, 3–8 January 2022; pp. 3172–3182. [Google Scholar] [CrossRef]
- Saharia, C.; Chan, W.; Chang, H.; Lee, C.; Ho, J.; Salimans, T.; Fleet, D.; Norouzi, M. Palette: Image-to-Image Diffusion Models. Proc. ACM SIGGRAPH 2022, 1, 1–10. [Google Scholar] [CrossRef]
- Lugmayr, A.; Danelljan, M.; Romero, A.; Yu, F.; Timofte, R.; Van Gool, L. RePaint: Inpainting using Denoising Diffusion Probabilistic Models. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 11451–11461. [Google Scholar] [CrossRef]
- Conover, W.J. Practical Nonparametric Statistics, 3rd ed.; Wiley series in probability and statistics Applied probability and statistics; Wiley: New York, NY, USA, 1999. [Google Scholar]
- He, K.; Sun, J.; Tang, X. Guided Image Filtering. In Proceedings of the 11th European Conference on Computer Vision, Crete, Greece, 5–11 September 2010; pp. 1–14. [Google Scholar] [CrossRef]
- Barron, J.T.; Poole, B. The Fast Bilateral Solver. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 11–14 October 2016; pp. 617–632. [Google Scholar]
- Hui, T.W.; Loy, C.C.; Tang, X. Depth Map Super-Resolution by Deep Multi-Scale Guidance. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 11–14 October 2016; pp. 353–369. [Google Scholar]
- Ham, B.; Cho, M.; Ponce, J. Robust Guided Image Filtering Using Nonconvex Potentials. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 192–207. [Google Scholar] [CrossRef] [PubMed]
- Lutio, R.D.; D’Aronco, S.; Wegner, J.D.; Schindler, K. Guided super-resolution as pixel-to-pixel transformation. In Proceedings of the IEEE International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 8828–8836. [Google Scholar] [CrossRef]
- Lutio, R.D.; Becker, A.; DAronco, S.; Russo, S.; Wegner, J.D.; Schindler, K. Learning Graph Regularisation for Guided Super-Resolution. In Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 1969–1978. [Google Scholar] [CrossRef]
- Lim, B.; Son, S.; Kim, H.; Nah, S.; Lee, K. Enhanced Deep Residual Networks for Single Image Super-Resolution. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Los Alamitos, CA, USA, 21–26 July 2017; pp. 1132–1140. [Google Scholar] [CrossRef]





| Parameter | Value |
|---|---|
| Core Network Base | [16, 32, 64, 128, 128, 128] |
| Core Network Skip | [4, 4, 4, 4, 4, 4] |
| Head Network Base | [32, 32] |
| Head Network Skip | [32, 32] |
| Head Kernel Size | 3 × 3 |
| Head Activation | None |
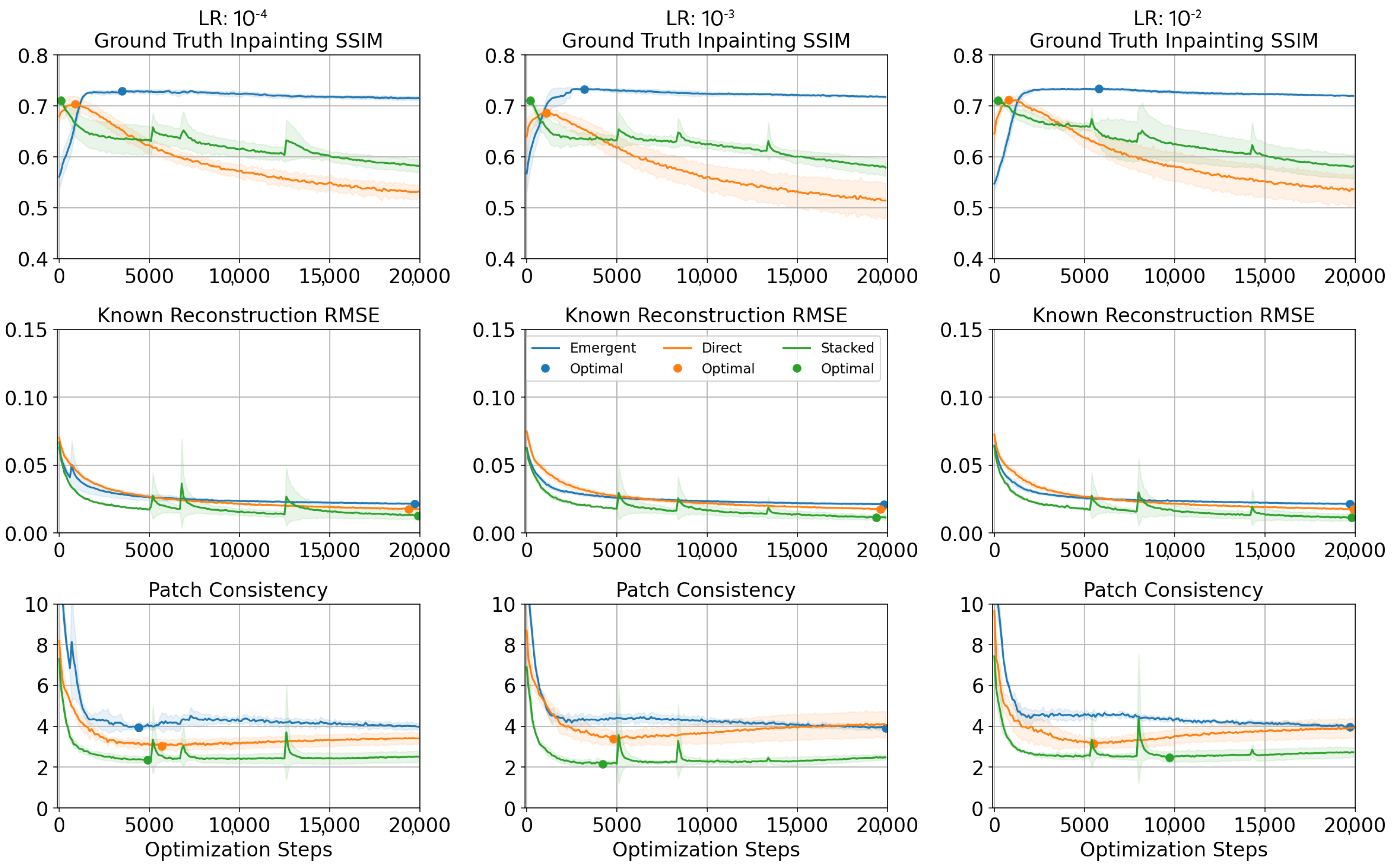
| Method | LR | Inpainting SSIM (GT) ↑ | Known RMSE ↓ | Patch Consistency ↓ |
|---|---|---|---|---|
| 10−4 | 0.732 at 3600 ± 1579 | 0.022 at 19,325 ± 491 | 3.782 at 8600 ± 5839 | |
| MCPN Emergent | 10−3 | 0.735 at 3725 ± 914 | 0.021 at 19,575 ± 449 | 3.805 at 15,275 ± 7553 |
| 10−2 | 0.735 at 3575 ± 1380 | 0.021 at 19,525 ± 363 | 3.875 at 15,000 ± 7510 | |
| 10−4 | 0.706 at 800 ± 254 | 0.017 at 19,400 ± 494 | 2.989 at 5375 ± 1028 | |
| MCPN Direct | 10−3 | 0.689 at 1350 ± 390 | 0.018 at 19,600 ± 212 | 3.322 at 6425 ± 1987 |
| 10−2 | 0.714 at 1000 ± 158 | 0.017 at 19,850 ± 50 | 3.025 at 5750 ± 1425 | |
| 10−4 | 0.713 at 75 ± 43 | 0.011 at 17,650 ± 3332 | 2.261 at 9700 ± 5980 | |
| Stacked | 10−3 | 0.712 at 1400 ± 2136 | 0.011 at 19,450 ± 384 | 2.032 at 9025 ± 4935 |
| 10−2 | 0.716 at 3450 ± 3377 | 0.011 at 16,525 ± 5063 | 2.367 at 8675 ± 4246 |
| Method | LR | Ideal (GT) | 4000 Steps | Known RMSE | Patch Consistency |
|---|---|---|---|---|---|
| MCPN Emergent | 10−3 | 0.677 ± 0.071 | 0.626 ± 0.160 | 0.669 ± 0.066 | 0.637 ± 0.098 |
| MCPN Direct | 10−2 | 0.663 ± 0.069 | 0.611 ± 0.070 | 0.521 ± 0.080 | 0.601 ± 0.074 |
| Stacked | 10−2 | 0.650 ± 0.079 | 0.573 ± 0.090 | 0.545 ± 0.078 | 0.570 ± 0.087 |
| Guidance | MCPN (Emergent Core) | MCPN (Direct Core) | Stacked | ||
|---|---|---|---|---|---|
| Current Sentinel-1 | Whole | SSIM ↑ | 0.854 ± 0.041 | 0.760 ± 0.052 | 0.743 ± 0.053 |
| RMSE ↓ | 0.079 ± 0.053 | 0.088 ± 0.029 | 0.092 ± 0.041 | ||
| Inpainting | SSIM ↑ | 0.665 ± 0.082 | 0.657 ± 0.072 | 0.661 ± 0.077 | |
| RMSE ↓ | 0.137 ± 0.090 | 0.130 ± 0.053 | 0.131 ± 0.063 | ||
| Historical Sentinel-2 | Whole | SSIM ↑ | 0.879 ± 0.044 | 0.853 ± 0.069 | 0.879 ± 0.062 |
| RMSE ↓ | 0.081 ± 0.062 | 0.072 ± 0.026 | 0.071 ± 0.046 | ||
| Inpainting | SSIM ↑ | 0.719 ± 0.113 | 0.714 ± 0.068 | 0.738 ± 0.090 | |
| RMSE ↓ | 0.142 ± 0.108 | 0.120 ± 0.039 | 0.120 ± 0.069 | ||
| Current Sentinel-1 + Historical Sentinel-2 | Whole | SSIM ↑ | 0.876 ± 0.036 | 0.838 ± 0.056 | 0.869 ± 0.065 |
| RMSE ↓ | 0.071 ± 0.055 | 0.071 ± 0.030 | 0.066 ± 0.038 | ||
| Inpainting | SSIM ↑ | 0.743 ± 0.098 | 0.694 ± 0.064 | 0.741 ± 0.083 | |
| RMSE ↓ | 0.121 ± 0.101 | 0.117 ± 0.050 | 0.111 ± 0.059 |
| Guidance | MCPN (Emergent Core) | MCPN (Direct Core) | Stacked | ||
|---|---|---|---|---|---|
| Known RMSE | 4000 Steps | 4000 Steps | |||
| Current Sentinel-1 | Whole | SSIM ↑ | 0.859 ± 0.041 | 0.824 ± 0.045 | 0.837 ± 0.063 |
| RMSE ↓ | 0.079 ± 0.048 | 0.081 ± 0.033 | 0.086 ± 0.050 | ||
| Inpainting | SSIM ↑ | 0.638 ± 0.081 | 0.601 ± 0.068 | 0.576 ± 0.080 | |
| RMSE ↓ | 0.141 ± 0.082 | 0.140 ± 0.055 | 0.149 ± 0.071 | ||
| Historical Sentinel-2 | Whole | SSIM ↑ | 0.880 ± 0.043 | 0.864 ± 0.041 | 0.875 ± 0.063 |
| RMSE ↓ | 0.079 ± 0.051 | 0.075 ± 0.028 | 0.086 ± 0.059 | ||
| Inpainting | SSIM ↑ | 0.698 ± 0.107 | 0.692 ± 0.075 | 0.703 ± 0.105 | |
| RMSE ↓ | 0.142 ± 0.089 | 0.131 ± 0.044 | 0.147 ± 0.089 | ||
| Current Sentinel-1 + Historical Sentinel-2 | Whole | SSIM ↑ | 0.882 ± 0.036 | 0.861 ± 0.039 | 0.879 ± 0.055 |
| RMSE ↓ | 0.069 ± 0.048 | 0.071 ± 0.032 | 0.074 ± 0.049 | ||
| Inpainting | SSIM ↑ | 0.735 ± 0.096 | 0.679 ± 0.070 | 0.713 ± 0.100 | |
| RMSE ↓ | 0.120 ± 0.087 | 0.124 ± 0.054 | 0.128 ± 0.076 |
| Guidance | MCPN (Emergent Core) | MCPN (Direct Core) | Stacked | ||
|---|---|---|---|---|---|
| Known RMSE | 4000 Steps | 4000 Steps | |||
| Current Sentinel-1 | Whole | SSIM ↑ | +0.900 ✓ | −0.993 ✗ | +0.094 |
| RMSE ↓ | −0.555 ✓ | +0.417 ✗ | +0.138 | ||
| Inpainting | SSIM ↑ | +0.900 ✓ | −0.168 ✓ | −0.732 | |
| RMSE ↓ | −0.488 ✓ | +0.175 ✓ | +0.313 | ||
| Historical Sentinel-2 | Whole | SSIM ↑ | +0.207 ✗ | −0.652 ✗ | +0.445 |
| RMSE ↓ | −0.100 ✓ | +0.139 ✗ | −0.039 | ||
| Inpainting | SSIM ↑ | −0.031 ✗ | −0.212 ✗ | +0.243 | |
| RMSE ↓ | −0.032 ✗ | +0.056 ✓ | −0.024 | ||
| Current Sentinel-1 + Historical Sentinel-2 | Whole | SSIM ↑ | +0.405 ✗ | −0.953 ✗ | +0.548 |
| RMSE ↓ | −0.452 ✓ | +0.526 ✗ | −0.074 | ||
| Inpainting | SSIM ↑ | +0.738 ✓ | −0.823 ✗ | +0.085 | |
| RMSE ↓ | −0.521 ✓ | +0.489 ✗ | +0.032 |
| Factor | MCPN (Emergent Core) | MCPN (Direct Core) | Stacked | PixTransform [34] | EDSR [36] | |
|---|---|---|---|---|---|---|
| 4000 Steps | Known RMSE | 4000 Steps | ||||
| ×16 | SSIM ↑ | 0.487 ± 0.137 | 0.733 ± 0.068 | 0.719 ± 0.072 | 0.718 ± 0.060 | 0.699 ± 0.055 |
| RMSE ↓ | 0.184 ± 0.057 | 0.085 ± 0.047 | 0.094 ± 0.060 | 0.094 ± 0.046 | 0.098 ± 0.045 | |
| ×8 | SSIM ↑ | 0.584 ± 0.168 | 0.782 ± 0.049 | 0.771 ± 0.085 | 0.758 ± 0.052 | 0.727 ± 0.050 |
| RMSE ↓ | 0.135 ± 0.067 | 0.064 ± 0.029 | 0.076 ± 0.061 | 0.076 ± 0.039 | 0.080 ± 0.040 | |
| ×4 | SSIM ↑ | 0.685 ± 0.137 | 0.847 ± 0.029 | 0.825 ± 0.084 | 0.815 ± 0.044 | 0.789 ± 0.038 |
| RMSE ↓ | 0.104 ± 0.068 | 0.047 ± 0.017 | 0.062 ± 0.057 | 0.061 ± 0.031 | 0.061 ± 0.031 |
| Guidance | MCPN (Emergent Core) | MCPN (Direct Core) | Stacked | ||
|---|---|---|---|---|---|
| Facades (Segmentation → Building) | Whole | SSIM ↑ | 0.763 ± 0.044 § | 0.784 ± 0.058 † | 0.720 ± 0.100 † |
| RMSE ↓ | 0.108 ± 0.031 § | 0.113 ± 0.040 † | 0.118 ± 0.038 † | ||
| Inpainting | SSIM ↑ | 0.476 ± 0.109 § | 0.505 ± 0.144 † | 0.453 ± 0.130 † | |
| RMSE ↓ | 0.172 ± 0.051 § | 0.183 ± 0.067 † | 0.184 ± 0.061 † | ||
| Maps (Map → Aerial) | Whole | SSIM ↑ | 0.791 ± 0.070 † | 0.768 ± 0.074 § | 0.744 ± 0.076 § |
| RMSE ↓ | 0.085 ± 0.031 † | 0.085 ± 0.030 § | 0.113 ± 0.038 § | ||
| Inpainting | SSIM ↑ | 0.512 ± 0.174 † | 0.510 ± 0.175 § | 0.404 ± 0.169 § | |
| RMSE ↓ | 0.137 ± 0.051 † | 0.134 ± 0.050 § | 0.183 ± 0.061 § | ||
| Night-to-Day (Day → Night) | Whole | SSIM ↑ | 0.870 ± 0.068 † | 0.769 ± 0.093 ‡ | 0.828 ± 0.103 ‡ |
| RMSE ↓ | 0.075 ± 0.041 † | 0.100 ± 0.038 ‡ | 0.096 ± 0.055 ‡ | ||
| Inpainting | SSIM ↑ | 0.709 ± 0.167 † | 0.576 ± 0.148 ‡ | 0.644 ± 0.178 ‡ | |
| RMSE ↓ | 0.121 ± 0.067 † | 0.157 ± 0.060 ‡ | 0.150 ± 0.076 ‡ | ||
| Cityscapes (Segmentation → Street) | Whole | SSIM ↑ | 0.822 ± 0.031 § | 0.793 ± 0.041 § | 0.802 ± 0.047 § |
| RMSE ↓ | 0.093 ± 0.030 § | 0.092 ± 0.023 § | 0.093 ± 0.028 § | ||
| Inpainting | SSIM ↑ | 0.613 ± 0.077 § | 0.610 ± 0.071 § | 0.608 ± 0.077 § | |
| RMSE ↓ | 0.150 ± 0.050 § | 0.143 ± 0.037 § | 0.147 ± 0.047 § |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Czerkawski, M.; Upadhyay, P.; Davison, C.; Atkinson, R.; Michie, C.; Andonovic, I.; Macdonald, M.; Cardona, J.; Tachtatzis, C. Multi-Modal Convolutional Parameterisation Network for Guided Image Inverse Problems. J. Imaging 2024, 10, 69. https://doi.org/10.3390/jimaging10030069
Czerkawski M, Upadhyay P, Davison C, Atkinson R, Michie C, Andonovic I, Macdonald M, Cardona J, Tachtatzis C. Multi-Modal Convolutional Parameterisation Network for Guided Image Inverse Problems. Journal of Imaging. 2024; 10(3):69. https://doi.org/10.3390/jimaging10030069
Chicago/Turabian StyleCzerkawski, Mikolaj, Priti Upadhyay, Christopher Davison, Robert Atkinson, Craig Michie, Ivan Andonovic, Malcolm Macdonald, Javier Cardona, and Christos Tachtatzis. 2024. "Multi-Modal Convolutional Parameterisation Network for Guided Image Inverse Problems" Journal of Imaging 10, no. 3: 69. https://doi.org/10.3390/jimaging10030069
APA StyleCzerkawski, M., Upadhyay, P., Davison, C., Atkinson, R., Michie, C., Andonovic, I., Macdonald, M., Cardona, J., & Tachtatzis, C. (2024). Multi-Modal Convolutional Parameterisation Network for Guided Image Inverse Problems. Journal of Imaging, 10(3), 69. https://doi.org/10.3390/jimaging10030069