
An Efficient and Effective Image Decolorization Algorithm Based on Cumulative Distribution Function


Abstract
1. Introduction
- We propose a fast, efficient, and effective ID algorithm to address the computational limitations of existing ID algorithms that limit their practical usage. The proposed algorithm has linear time complexity and can achieve comparable runtime performance to traditional methods;
- We propose two new objective metrics to measure the performance of our ID algorithm. By combining these new metrics with existing metrics, a more comprehensive evaluation of ID algorithm performance may be obtained.
2. Related Work
3. Proposed Algorithm
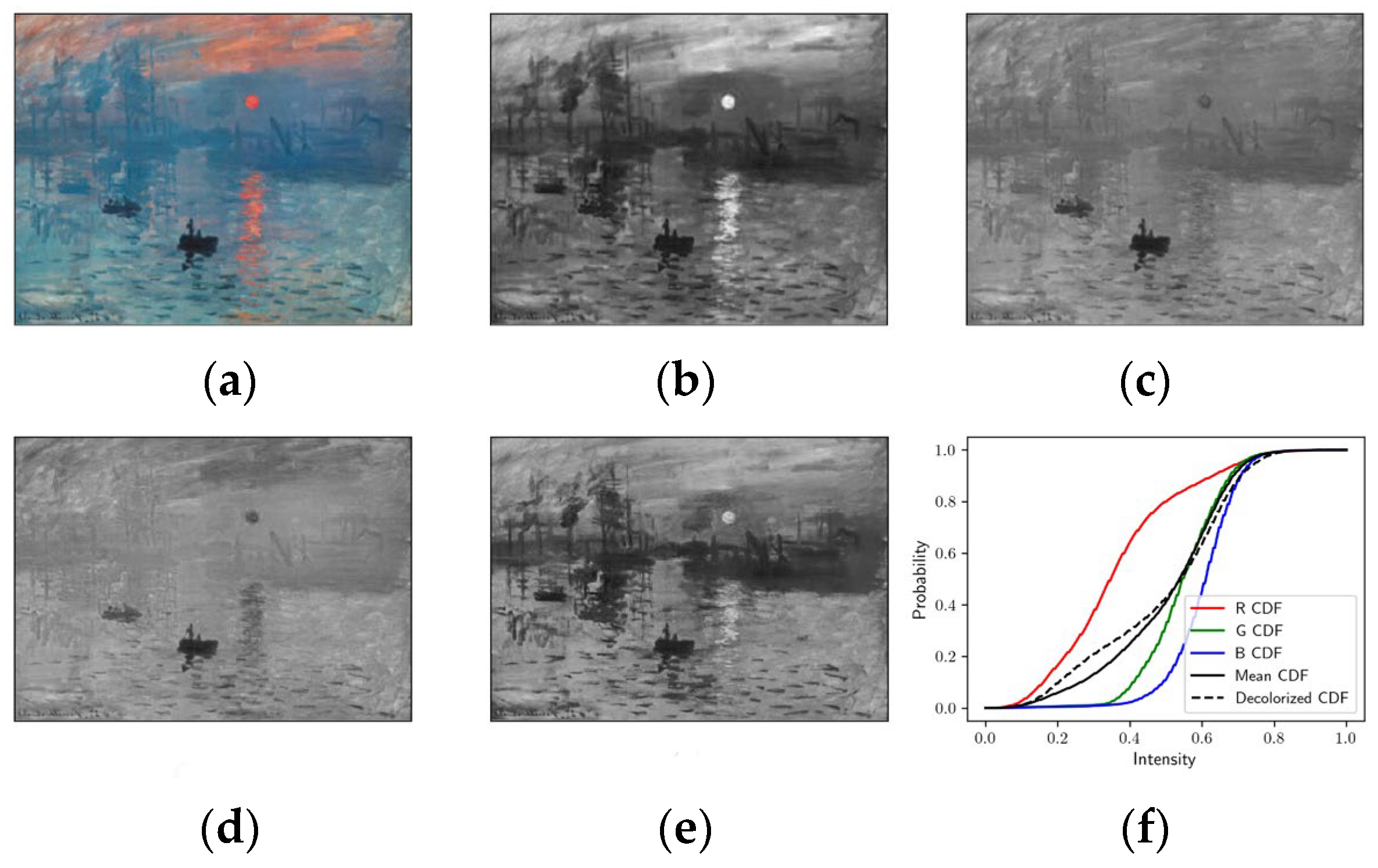
3.1. Algorithm Description
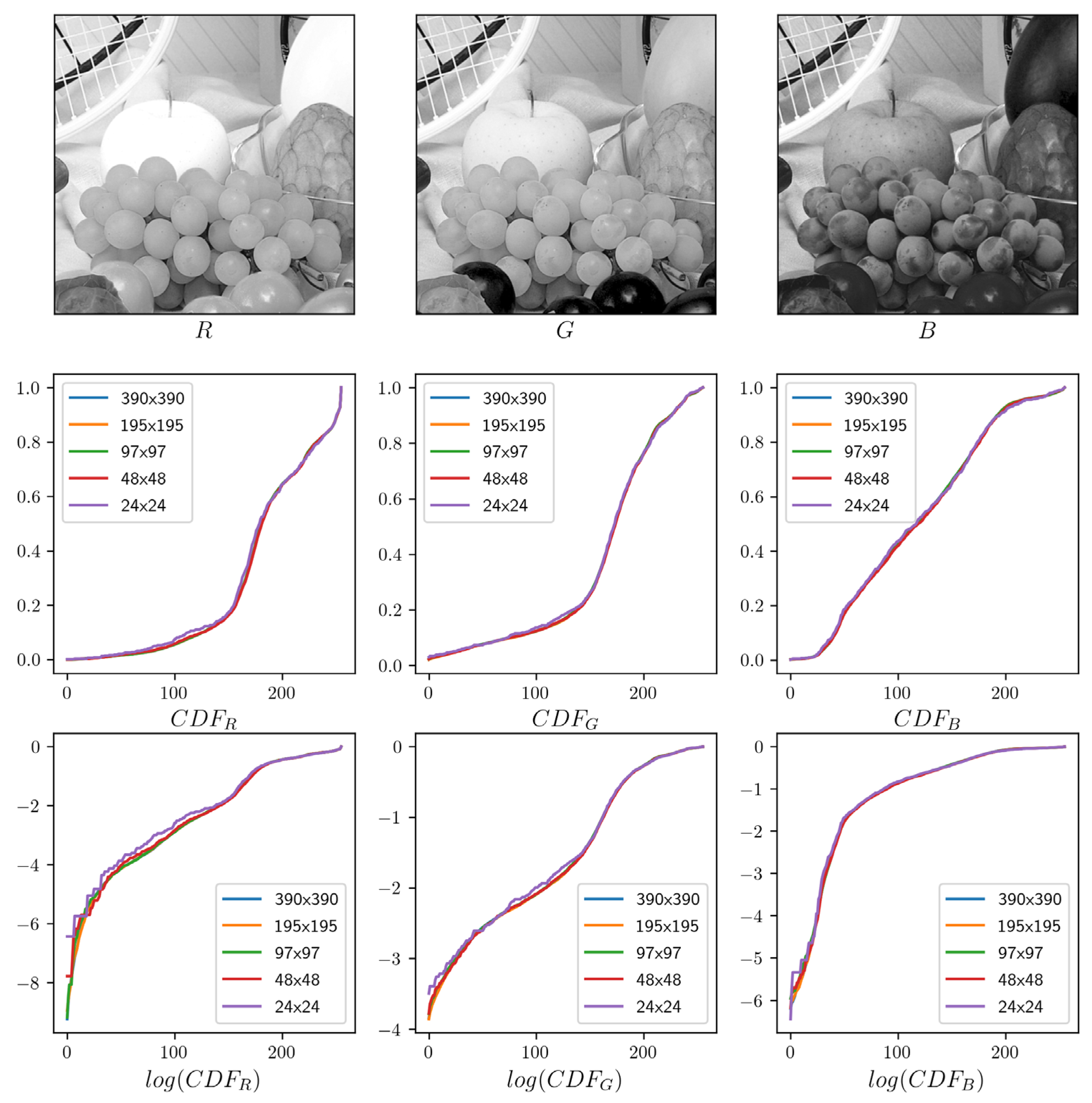
3.2. CDF Approximation
4. Experiments
4.1. Performance Metrics
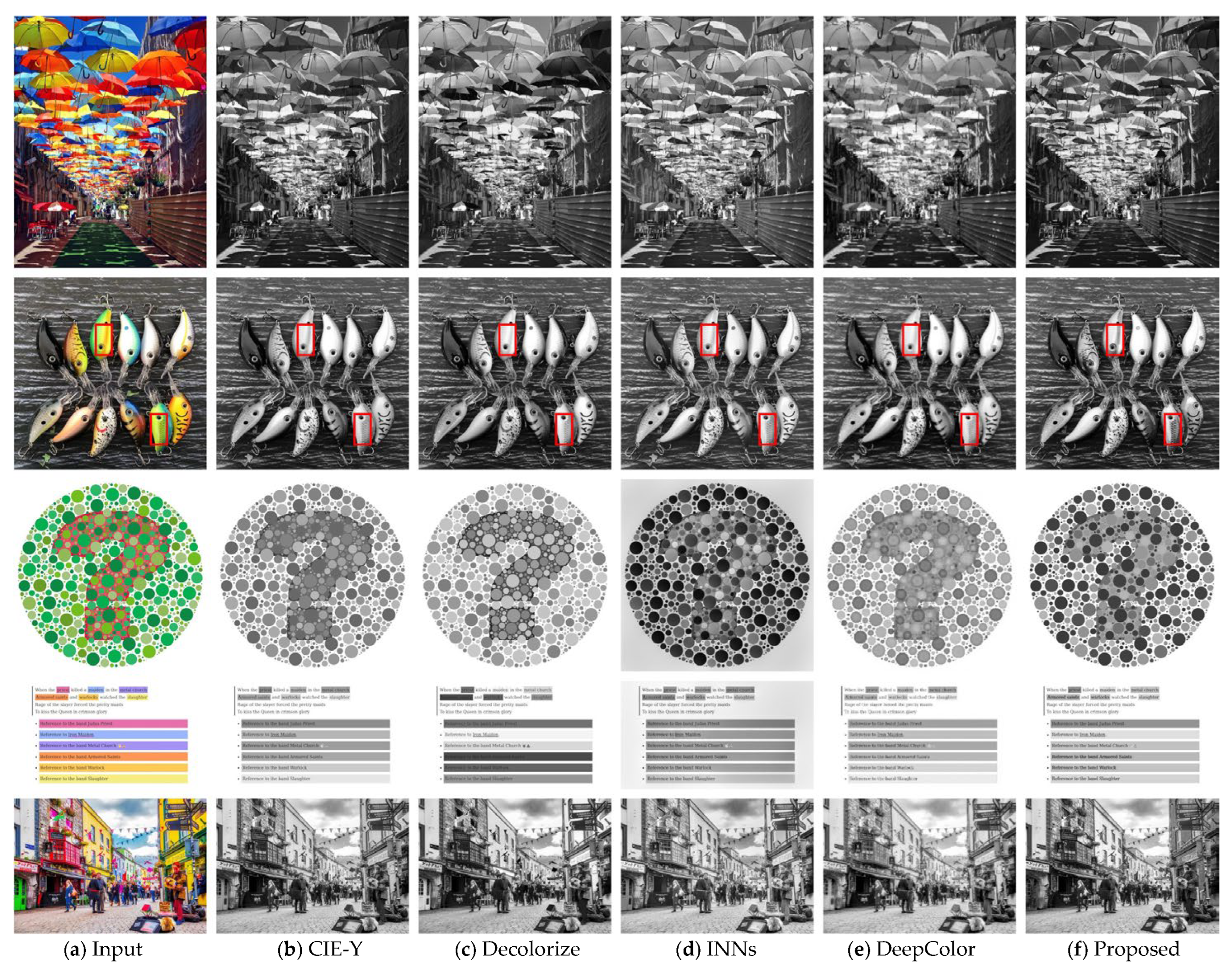
4.2. Results
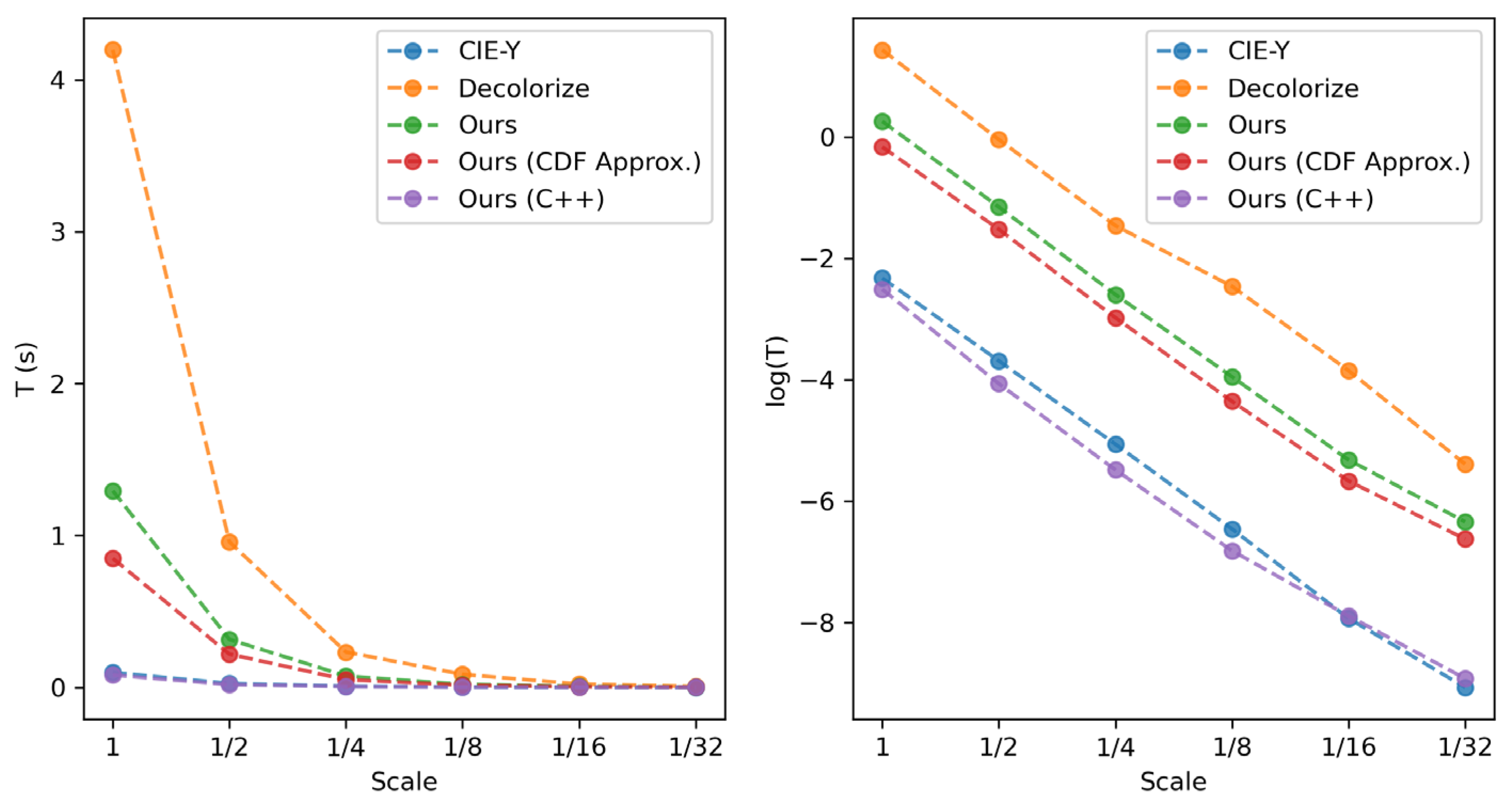
4.3. Speed Assessment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Viola, P.; Jones, M. Rapid Object Detection using a Boosted Cascade of Simple Features. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Kauai, HI, USA, 8–14 December 2001; IEEE: Piscataway, NJ, USA, 2001. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of Oriented Gradients for Human Detection. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Diego, CA, USA, 20–25 June 2005; IEEE: Piscataway, NJ, USA, 2005. [Google Scholar]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Ojala, T.; Pietikainen, M.; Harwood, D. Performance Evaluation of Texture Measures with Classification based on Kullback Discrimination of Distributions. In Proceedings of the 12th International Conference on Pattern Recognition, Jerusalem, Israel, 9–13 October 1994; IEEE: Piscataway, NJ, USA, 1994. [Google Scholar]
- Canny, J. A Computational Approach to Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, PAMI-8, 679–698. [Google Scholar] [CrossRef]
- Qu, Y.-D.; Cui, C.-S.; Chen, S.-B.; Li, J.-Q. A Fast Subpixel Edge Detection Method using Sobel–Zernike Moments Operator. Image Vis. Comput. 2005, 23, 11–17. [Google Scholar]
- Duda, R.O.; Hart, P.E. Use of the Hough Transformation to Detect Lines and Curves in Pictures. Commun. ACM 1972, 15, 11–15. [Google Scholar] [CrossRef]
- Rosten, E.; Drummond, T. Machine Learning for High-speed Corner Detection. In Proceedings of the 9th European Conference on Computer Vision, Graz, Austria, 7–13 May 2006; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Trajković, M.; Hedley, M. Fast Corner Detection. Image Vis. Comput. 1998, 16, 75–87. [Google Scholar] [CrossRef]
- Calonder, M.; Lepetit, V.; Ozuysal, M.; Trzcinski, T.; Strecha, C.; Fua, P. BRIEF: Computing a Local Binary Descriptor Very Fast. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 34, 1281–1298. [Google Scholar] [CrossRef] [PubMed]
- Leutenegger, S.; Chli, M.; Siegwart, R.Y. BRISK: Binary Robust Invariant Scalable Keypoints. In Proceedings of the International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar]
- Alahi, A.; Ortiz, R.; Vandergheynst, P. Freak: Fast Retina Keypoint. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; IEEE: Piscataway, NJ, USA, 2012. [Google Scholar]
- Davison. Real-Time Simultaneous Localisation and Mapping with a Single Camera. In Proceedings of the Proceedings Ninth IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003; IEEE: Piscataway, NJ, USA, 2003. [Google Scholar]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Engel, J.; Sturm, J.; Cremers, D. Semi-Dense vVsual Odometry for a Monocular Camera. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar]
- Forster, C.; Pizzoli, M.; Scaramuzza, D. SVO: Fast Semi-Direct Monocular Visual Odometry. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar]
- Hirose, K.; Saito, H. Fast Line Description for Line-based SLAM. In Proceedings of the BMVC, Surrey, UK, 3–7 September 2012. [Google Scholar]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure From Motion Photogrammetry in Forestry: A Review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef]
- Schonberger, J.L.; Frahm, J.-M. Structure-from-Motion Revisited. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Fairchild, M.D. Color Appearance Models; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Bala, R.; Eschbach, R. Spatial Color-to-Grayscale Transform Preserving Chrominance Edge Information. In Proceedings of the Color Imaging Conference, Scottdale, AZ, USA, 9–12 November 2004; pp. 82–86. [Google Scholar]
- Gooch, A.A.; Olsen, S.C.; Tumblin, J.; Gooch, B. Color2Gray: Salience-Preserving Color Removal. ACM Trans. Graph. (TOG) 2005, 24, 634–639. [Google Scholar] [CrossRef]
- Rasche, K.; Geist, R.; Westall, J. Re-Coloring Images for Gamuts of Lower Dimension; Eurographics: Dublin, Ireland, 2005. [Google Scholar]
- Neumann, L.; Čadík, M.; Nemcsics, A. An Efficient Perception-based Adaptive Color to Gray Transformation. In Proceedings of the Third Eurographics conference on Computational Aesthetics in Graphics, Visualization and Imaging, Banff, AB, Canada, 20–22 June 2007. [Google Scholar]
- Yu, J.; Li, F.; Lv, X. Contrast Preserving Decolorization based on the Weighted Normalized L1 Norm. Multimed. Tools Appl. 2021, 80, 31753–31782. [Google Scholar] [CrossRef]
- de Queiroz, R.L.; Braun, K.M. Color to Gray and Back: Color Embedding into Textured Gray Images. IEEE Trans. Image Process. 2006, 15, 1464–1470. [Google Scholar] [CrossRef]
- Wu, T.; Toet, A. Color-to-grayscale conversion through weighted multiresolution channel fusion. J. Electron. Imaging 2014, 23, 043004. [Google Scholar] [CrossRef]
- Yu, N.; Li, J.; Hua, Z. Decolorization Algorithm based on Contrast Pyramid Transform Fusion. Multimed. Tools Appl. 2022, 81, 15017–15039. [Google Scholar] [CrossRef]
- Grundland, M.; Dodgson, N.A. Decolorize: Fast, Contrast Enhancing, Color to Grayscale Conversion. Pattern Recognit. 2007, 40, 2891–2896. [Google Scholar] [CrossRef]
- Kim, Y.; Jang, C.; Demouth, J.; Lee, S. Robust Color-to-Gray via Nonlinear Global Mapping. In Proceedings of the ACM Siggraph Asia, Yokohama, Japan, 16–19 December 2009; pp. 1–4. [Google Scholar]
- Alsam, A.; Kolås, Ø. Grey Colour Sharpening. In Proceedings of the Color Imaging Conference, Scottsdale, AZ, USA, 6–10 November 2006. [Google Scholar]
- Smith, K.; Landes, P.E.; Thollot, J.; Myszkowski, K. Apparent Greyscale: A Simple and Fast Conversion to Perceptually Accurate Images and video. In Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2008. [Google Scholar]
- Zhang, X.; Liu, S. Contrast Preserving Image Decolorization Combining Global Features and Local Semantic Features. Vis. Comput. 2018, 34, 1099–1108. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, X. Image Decolorization Combining Local Features and Exposure Features. IEEE Trans. Multimed. 2019, 21, 2461–2472. [Google Scholar] [CrossRef]
- Zhao, R.; Liu, T.; Xiao, J.; Lun, D.P.; Lam, K.-M. Invertible Image Decolorization. IEEE Trans. Image Process. 2021, 30, 6081–6095. [Google Scholar] [CrossRef]
- Cai, B.; Xu, X.; Xing, X. Perception Preserving Decolorization. In Proceedings of the 25th IEEE International Conference on Image Processing (ICIP), Athens, Greece, 7–10 October 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Zhang, L.; Wan, Y. Color-to-Gray Conversion based on Boundary Points. In Proceedings of the 2022 11th International Conference on Communications, Circuits and Systems (ICCCAS), Singapore, 13–15 May 2022; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar]
- Yu, J.; Li, F.; Hu, X. Two-Stage Decolorization Based on Histogram Equalization and Local Variance Maximization. SIAM J. Imaging Sci. 2023, 16, 740–769. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef]
- Mittal, A.; Moorthy, A.K.; Bovik, A.C. No-reference image quality assessment in the spatial domain. IEEE Trans. Image Process. 2012, 21, 4695–4708. [Google Scholar] [CrossRef]
- Peli, E. Contrast in Complex Images. JOSA A 1990, 7, 2032–2040. [Google Scholar] [CrossRef]
- Lin, W.; Kuo, C.-C.J. Perceptual Visual Quality Metrics: A Survey. J. Vis. Commun. Image Represent. 2011, 22, 297–312. [Google Scholar] [CrossRef]
- Damera-Venkata, N.; Kite, T.D.; Geisler, W.S.; Evans, B.L.; Bovik, A.C. Image Quality Assessment Based on a Degradation Model. IEEE Trans. Image Process. 2000, 9, 636–650. [Google Scholar] [CrossRef] [PubMed]
- Gu, K.; Zhai, G.; Lin, W.; Yang, X.; Zhang, W. No-Reference Image Sharpness Assessment in Autoregressive Parameter Space. IEEE Trans. Image Process. 2015, 24, 3218–3231. [Google Scholar] [PubMed]
- Avidan, S.; Shamir, A. Seam Carving for Content-Aware Image Resizing. In Proceedings of the ACM Siggraph, San Diego, CA, USA, 4–5 August 2007. [Google Scholar]
- Mikolajczyk, K.; Zisserman, A.; Schmid, C. Shape Recognition with Edge-based Features. In Proceedings of the British Machine Vision Conference (BMVC’03), Norwich, UK, 9–11 September 2003. [Google Scholar]
- Ĉadík, M. Perceptual Evaluation of Color-to-Grayscale Image Conversions. In Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2008. [Google Scholar]
- Harris, C.R.; Millman, K.J.; Van Der Walt, S.J.; Gommers, R.; Virtanen, P.; Cournapeau, D.; Wieser, E.; Taylor, J.; Berg, S.; Smith, N.J. Array Programming with NumPy. Nature 2020, 585, 357–362. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Name | Smith [32] | CIE-Y [20] | Decolorize [29] | Color2Gray [22] | Neumann [24] | INNs [35] | DeepColor [36] | Proposed |
|---|---|---|---|---|---|---|---|---|
| butterfly | 0.74 | 0.72 | 0.72 | 0.48 | 0.77 | 0.61 | 0.70 | 0.73 |
| 155_5572 | 0.40 | 0.40 | 0.42 | 0.45 | 0.53 | 0.40 | 0.39 | 0.53 |
| dscn9952 | 0.53 | 0.49 | 0.44 | 0.54 | 0.74 | 0.47 | 0.45 | 0.91 |
| im2-color | 0.06 | 0.05 | 0.15 | 0.29 | 0.16 | 0.04 | 0.15 | 0.20 |
| colorspastel | 0.06 | 0.06 | 0.13 | 0.35 | 0.13 | 0.05 | 0.10 | 0.06 |
| 25_color | 0.40 | 0.38 | 0.67 | 0.52 | 0.45 | 0.36 | 0.84 | 0.56 |
| balls0_color | 0.40 | 0.39 | 0.38 | 0.46 | 0.44 | 0.39 | 0.47 | 0.59 |
| impatient | 0.44 | 0.40 | 0.50 | 0.36 | 0.41 | 0.39 | 0.41 | 0.53 |
| c8tz7768 | 0.30 | 0.29 | 0.48 | 0.48 | 0.33 | 0.28 | 0.28 | 0.29 |
| sunrise312 | 0.18 | 0.16 | 0.33 | 0.26 | 0.20 | 0.15 | 0.19 | 0.31 |
| monarch | 0.42 | 0.37 | 0.38 | 0.38 | 0.39 | 0.36 | 0.35 | 0.48 |
| serrano | 0.49 | 0.47 | 0.51 | 0.46 | 0.53 | 0.41 | 0.46 | 0.48 |
| girl | 0.76 | 0.72 | 0.63 | 0.65 | 0.78 | 0.69 | 0.62 | 0.73 |
| ski_tc8 | 0.66 | 0.62 | 0.60 | 0.43 | 0.71 | 0.56 | 0.62 | 0.70 |
| watch | 0.60 | 0.50 | 0.53 | 0.29 | 0.55 | 0.46 | 0.47 | 0.57 |
| arctichare | 0.21 | 0.21 | 0.26 | 0.22 | 0.22 | 0.19 | 0.24 | 0.23 |
| ramp | 0.03 | 0.03 | 0.19 | 0.52 | 0.16 | 0.02 | 0.06 | 0.08 |
| text | 0.28 | 0.25 | 0.27 | 0.21 | 0.26 | 0.19 | 0.27 | 0.26 |
| colorwheel | 0.08 | 0.03 | 0.33 | 0.42 | 0.22 | 0.04 | 0.30 | 0.42 |
| tulips | 0.60 | 0.53 | 0.71 | 0.46 | 0.57 | 0.53 | 0.66 | 0.64 |
| fruits | 0.28 | 0.28 | 0.35 | 0.26 | 0.31 | 0.25 | 0.28 | 0.42 |
| kodim03 | 0.41 | 0.38 | 0.41 | 0.42 | 0.40 | 0.39 | 0.34 | 0.39 |
| portrait | 0.53 | 0.50 | 0.51 | 0.42 | 0.52 | 0.46 | 0.43 | 0.54 |
| 34445 | 0.63 | 0.58 | 0.61 | 0.37 | 0.62 | 0.49 | 0.58 | 0.64 |
| tree_color | 0.79 | 0.73 | 0.75 | 0.65 | 0.77 | 0.74 | 0.69 | 0.80 |
| Overall average | 0.41 | 0.38 | 0.45 | 0.41 | 0.45 | 0.36 | 0.41 | 0.48 |
| Image Name | Smith [32] | CIE-Y [20] | Decolorize [29] | Color2Gray [22] | Neumann [24] | INNs [35] | DeepColor [36] | Proposed |
|---|---|---|---|---|---|---|---|---|
| butterfly | 0.18 | 0.17 | 0.17 | 0.32 | 0.19 | 0.34 | 0.17 | 0.16 |
| 155_5572 | 0.63 | 0.62 | 0.72 | 0.69 | 0.61 | 0.58 | 0.59 | 0.62 |
| dscn9952 | 0.63 | 0.62 | 0.81 | 0.72 | 0.62 | 0.61 | 0.70 | 0.69 |
| im2-color | 0.25 | 0.25 | 0.28 | 0.43 | 0.33 | 0.25 | 0.25 | 0.25 |
| colorspastel | 0.13 | 0.13 | 0.15 | 0.36 | 0.21 | 0.13 | 0.15 | 0.13 |
| 25_color | 0.35 | 0.37 | 0.27 | 0.32 | 0.33 | 0.37 | 0.32 | 0.28 |
| balls0_color | 0.42 | 0.42 | 0.56 | 0.43 | 0.40 | 0.43 | 0.38 | 0.41 |
| impatient | 0.39 | 0.39 | 0.47 | 0.46 | 0.38 | 0.39 | 0.39 | 0.37 |
| c8tz7768 | 0.30 | 0.30 | 0.36 | 0.50 | 0.32 | 0.35 | 0.32 | 0.29 |
| sunrise312 | 0.18 | 0.18 | 0.27 | 0.23 | 0.19 | 0.19 | 0.19 | 0.23 |
| monarch | 0.30 | 0.30 | 0.36 | 0.42 | 0.31 | 0.31 | 0.36 | 0.32 |
| serrano | 0.34 | 0.34 | 0.38 | 0.45 | 0.36 | 0.34 | 0.35 | 0.35 |
| girl | 0.19 | 0.19 | 0.25 | 0.22 | 0.19 | 0.19 | 0.22 | 0.19 |
| ski_tc8 | 0.31 | 0.30 | 0.37 | 0.42 | 0.31 | 0.32 | 0.33 | 0.30 |
| watch | 0.13 | 0.13 | 0.16 | 0.32 | 0.14 | 0.21 | 0.25 | 0.13 |
| arctichare | 0.08 | 0.06 | 0.10 | 0.10 | 0.07 | 0.07 | 0.10 | 0.07 |
| ramp | 0.21 | 0.20 | 0.26 | 0.53 | 0.27 | 0.20 | 0.22 | 0.22 |
| text | 0.09 | 0.08 | 0.08 | 0.11 | 0.08 | 0.16 | 0.09 | 0.07 |
| colorwheel | 0.54 | 0.54 | 0.53 | 0.78 | 0.58 | 0.55 | 0.50 | 0.51 |
| tulips | 0.31 | 0.31 | 0.42 | 0.47 | 0.31 | 0.33 | 0.32 | 0.32 |
| fruits | 0.24 | 0.25 | 0.26 | 0.30 | 0.28 | 0.26 | 0.25 | 0.26 |
| kodim03 | 0.31 | 0.31 | 0.33 | 0.38 | 0.32 | 0.30 | 0.35 | 0.29 |
| portrait | 0.12 | 0.12 | 0.14 | 0.19 | 0.13 | 0.17 | 0.16 | 0.12 |
| 34445 | 0.13 | 0.13 | 0.15 | 0.25 | 0.13 | 0.20 | 0.14 | 0.13 |
| tree_color | 0.07 | 0.07 | 0.07 | 0.15 | 0.07 | 0.09 | 0.11 | 0.06 |
| Overall average | 0.27 | 0.27 | 0.32 | 0.38 | 0.29 | 0.29 | 0.29 | 0.27 |
| Image Name | Smith [32] | CIE-Y [20] | Decolorize [29] | Color2Gray [22] | Neumann [24] | INNs [35] | DeepColor [36] | Proposed |
|---|---|---|---|---|---|---|---|---|
| butterfly | 0.35 | 0.32 | 0.33 | 0.23 | 0.32 | 0.19 | 0.35 | 0.33 |
| 155_5572 | 0.31 | 0.28 | 0.30 | 0.25 | 0.29 | 0.21 | 0.33 | 0.45 |
| dscn9952 | 0.39 | 0.30 | 0.40 | 0.33 | 0.29 | 0.17 | 0.33 | 0.57 |
| im2-color | 0.12 | 0.03 | 0.20 | 0.45 | 0.30 | 0.10 | 0.29 | 0.31 |
| colorspastel | 0.23 | 0.21 | 0.38 | 0.47 | 0.33 | 0.19 | 0.33 | 0.22 |
| 25_color | 0.26 | 0.24 | 0.33 | 0.28 | 0.27 | 0.21 | 0.32 | 0.31 |
| balls0_color | 0.34 | 0.3 | 0.31 | 0.29 | 0.35 | 0.26 | 0.34 | 0.46 |
| impatient | 0.31 | 0.27 | 0.32 | 0.27 | 0.29 | 0.23 | 0.31 | 0.40 |
| c8tz7768 | 0.25 | 0.20 | 0.33 | 0.40 | 0.21 | 0.23 | 0.28 | 0.36 |
| sunrise312 | 0.34 | 0.28 | 0.37 | 0.41 | 0.26 | 0.23 | 0.31 | 0.46 |
| monarch | 0.35 | 0.31 | 0.35 | 0.32 | 0.31 | 0.29 | 0.34 | 0.39 |
| serrano | 0.35 | 0.31 | 0.31 | 0.26 | 0.32 | 0.24 | 0.35 | 0.32 |
| girl | 0.38 | 0.32 | 0.35 | 0.31 | 0.33 | 0.27 | 0.34 | 0.38 |
| ski_tc8 | 0.37 | 0.31 | 0.33 | 0.25 | 0.32 | 0.25 | 0.35 | 0.34 |
| watch | 0.38 | 0.33 | 0.36 | 0.24 | 0.35 | 0.27 | 0.35 | 0.35 |
| arctichare | 0.34 | 0.33 | 0.37 | 0.37 | 0.33 | 0.26 | 0.36 | 0.34 |
| ramp | 0.15 | 0.06 | 0.33 | 0.53 | 0.27 | 0.08 | 0.30 | 0.25 |
| text | 0.36 | 0.33 | 0.33 | 0.26 | 0.34 | 0.21 | 0.34 | 0.34 |
| colorwheel | 0.12 | 0.04 | 0.21 | 0.24 | 0.15 | 0.12 | 0.28 | 0.30 |
| tulips | 0.34 | 0.31 | 0.26 | 0.24 | 0.3 | 0.26 | 0.34 | 0.37 |
| fruits | 0.33 | 0.30 | 0.33 | 0.25 | 0.31 | 0.23 | 0.33 | 0.41 |
| kodim03 | 0.38 | 0.33 | 0.32 | 0.36 | 0.33 | 0.26 | 0.36 | 0.38 |
| portrait | 0.36 | 0.32 | 0.35 | 0.31 | 0.34 | 0.26 | 0.34 | 0.34 |
| 34445 | 0.36 | 0.32 | 0.32 | 0.24 | 0.34 | 0.22 | 0.33 | 0.35 |
| tree_color | 0.36 | 0.31 | 0.32 | 0.34 | 0.33 | 0.24 | 0.31 | 0.33 |
| Overall average | 0.31 | 0.27 | 0.32 | 0.32 | 0.30 | 0.22 | 0.33 | 0.36 |
| Image Name | Smith [32] | CIE-Y [20] | Decolorize [29] | Color2Gray [22] | Neumann [24] | INNs [35] | DeepColor [36] | Proposed |
|---|---|---|---|---|---|---|---|---|
| butterfly | 0.83 | 0.82 | 0.81 | 0.79 | 0.83 | 0.78 | 0.83 | 0.87 |
| 155_5572 | 0.52 | 0.48 | 0.50 | 0.44 | 0.54 | 0.37 | 0.60 | 0.75 |
| dscn9952 | 0.67 | 0.61 | 0.66 | 0.61 | 0.49 | 0.38 | 0.59 | 0.57 |
| im2-color | 0.50 | 0.00 | 0.81 | 0.78 | 0.86 | 0.00 | 0.91 | 0.89 |
| colorspastel | 0.57 | 0.58 | 0.76 | 0.63 | 0.58 | 0.50 | 0.71 | 0.61 |
| 25_color | 0.97 | 0.97 | 0.97 | 0.97 | 0.96 | 0.99 | 0.97 | 1.17 |
| balls0_color | 0.61 | 0.59 | 0.60 | 0.59 | 0.65 | 0.55 | 0.61 | 0.85 |
| impatient | 0.39 | 0.35 | 0.45 | 0.39 | 0.38 | 0.29 | 0.40 | 0.63 |
| c8tz7768 | 0.61 | 0.45 | 0.70 | 0.79 | 0.50 | 0.50 | 0.79 | 0.75 |
| sunrise312 | 0.62 | 0.51 | 0.64 | 0.74 | 0.41 | 0.34 | 0.56 | 0.70 |
| monarch | 0.66 | 0.62 | 0.67 | 0.64 | 0.63 | 0.59 | 0.66 | 0.67 |
| serrano | 0.76 | 0.74 | 0.71 | 0.70 | 0.73 | 0.65 | 0.76 | 0.76 |
| girl | 0.80 | 0.65 | 0.77 | 0.63 | 0.60 | 0.43 | 0.68 | 0.76 |
| ski_tc8 | 0.73 | 0.66 | 0.71 | 0.59 | 0.65 | 0.57 | 0.67 | 0.70 |
| watch | 0.85 | 0.82 | 0.89 | 0.79 | 0.84 | 0.76 | 0.84 | 0.86 |
| arctichare | 0.64 | 0.62 | 0.64 | 0.68 | 0.62 | 0.43 | 0.63 | 0.65 |
| ramp | 0.25 | 0.00 | 0.69 | 0.31 | 0.80 | 0.00 | 0.22 | 0.51 |
| text | 0.92 | 0.93 | 0.93 | 0.92 | 0.93 | 0.96 | 0.93 | 0.93 |
| colorwheel | 0.57 | 0.00 | 0.75 | 0.79 | 0.68 | 0.30 | 0.86 | 0.86 |
| tulips | 0.70 | 0.66 | 0.52 | 0.59 | 0.66 | 0.53 | 0.67 | 0.73 |
| fruits | 0.56 | 0.53 | 0.59 | 0.42 | 0.53 | 0.36 | 0.58 | 0.73 |
| kodim03 | 0.77 | 0.72 | 0.69 | 0.73 | 0.68 | 0.53 | 0.73 | 0.78 |
| portrait | 0.73 | 0.70 | 0.73 | 0.72 | 0.73 | 0.63 | 0.72 | 0.72 |
| 34445 | 0.77 | 0.76 | 0.76 | 0.75 | 0.77 | 0.71 | 0.76 | 0.76 |
| tree_color | 0.61 | 0.52 | 0.59 | 0.62 | 0.58 | 0.38 | 0.53 | 0.57 |
| Overall average | 0.66 | 0.57 | 0.70 | 0.66 | 0.67 | 0.50 | 0.69 | 0.75 |
| Scale | CIE-Y | Decolorize | Proposed | Proposed (CDF Approx.) | Proposed (C++) |
|---|---|---|---|---|---|
| 1 | 0.1447 | 8.5286 | 1.1775 | 0.7790 | 0.1204 |
| 1/2 | 0.0409 | 1.5657 | 0.2969 | 0.1982 | 0.0280 |
| 1/4 | 0.0103 | 0.3394 | 0.0828 | 0.0510 | 0.0068 |
| 1/8 | 0.0022 | 0.0698 | 0.0204 | 0.0121 | 0.0015 |
| 1/16 | 0.0009 | 0.1492 | 0.0052 | 0.0030 | 0.0009 |
| 1/32 | 0.0007 | 0.0043 | 0.0019 | 0.0012 | 0.0007 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, T.; Eising, C.; Glavin, M.; Jones, E. An Efficient and Effective Image Decolorization Algorithm Based on Cumulative Distribution Function. J. Imaging 2024, 10, 51. https://doi.org/10.3390/jimaging10030051
Wu T, Eising C, Glavin M, Jones E. An Efficient and Effective Image Decolorization Algorithm Based on Cumulative Distribution Function. Journal of Imaging. 2024; 10(3):51. https://doi.org/10.3390/jimaging10030051
Chicago/Turabian StyleWu, Tirui, Ciaran Eising, Martin Glavin, and Edward Jones. 2024. "An Efficient and Effective Image Decolorization Algorithm Based on Cumulative Distribution Function" Journal of Imaging 10, no. 3: 51. https://doi.org/10.3390/jimaging10030051
APA StyleWu, T., Eising, C., Glavin, M., & Jones, E. (2024). An Efficient and Effective Image Decolorization Algorithm Based on Cumulative Distribution Function. Journal of Imaging, 10(3), 51. https://doi.org/10.3390/jimaging10030051