
Constrained Plug-and-Play Priors for Image Restoration


Abstract
1. Introduction
Notations
2. Constrained PnP Model
2.1. Plug-and-Play Models: A Brief Overview
| Algorithm 1: Alternating Direction Method of Multipliers (ADMM). |
|
| Algorithm 2: Plug-and-Play method (PnP). |
|
2.2. The Proposed Constrained Model
- A well-established result [44] states that ADMM converges even when more than two variables are considered in the formulation.
| Algorithm 3: Constrained Plug-and-Play approach (CPnP). |
|
3. Results
3.1. Settings, Evaluation Metrics, and Competing Baseline Methods
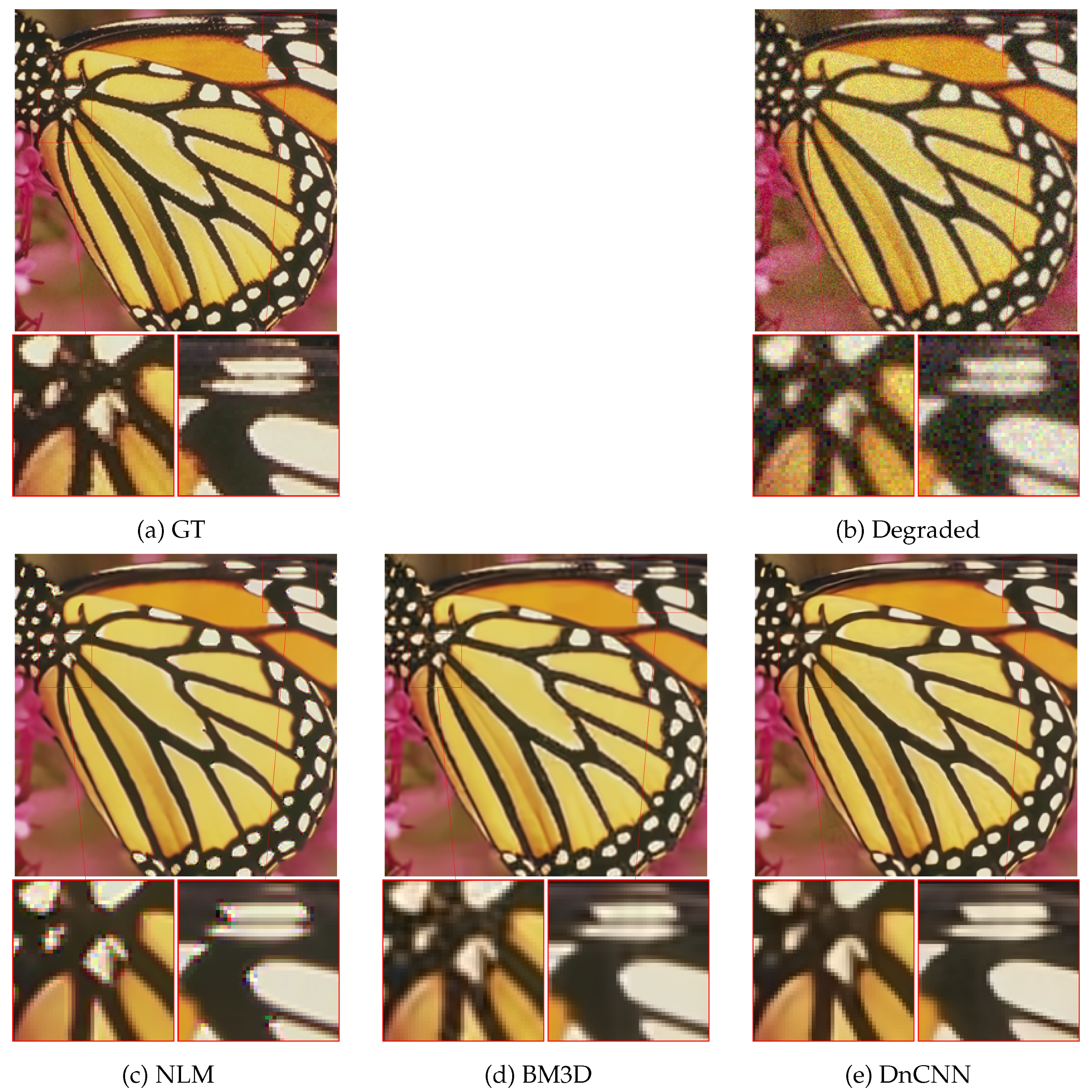
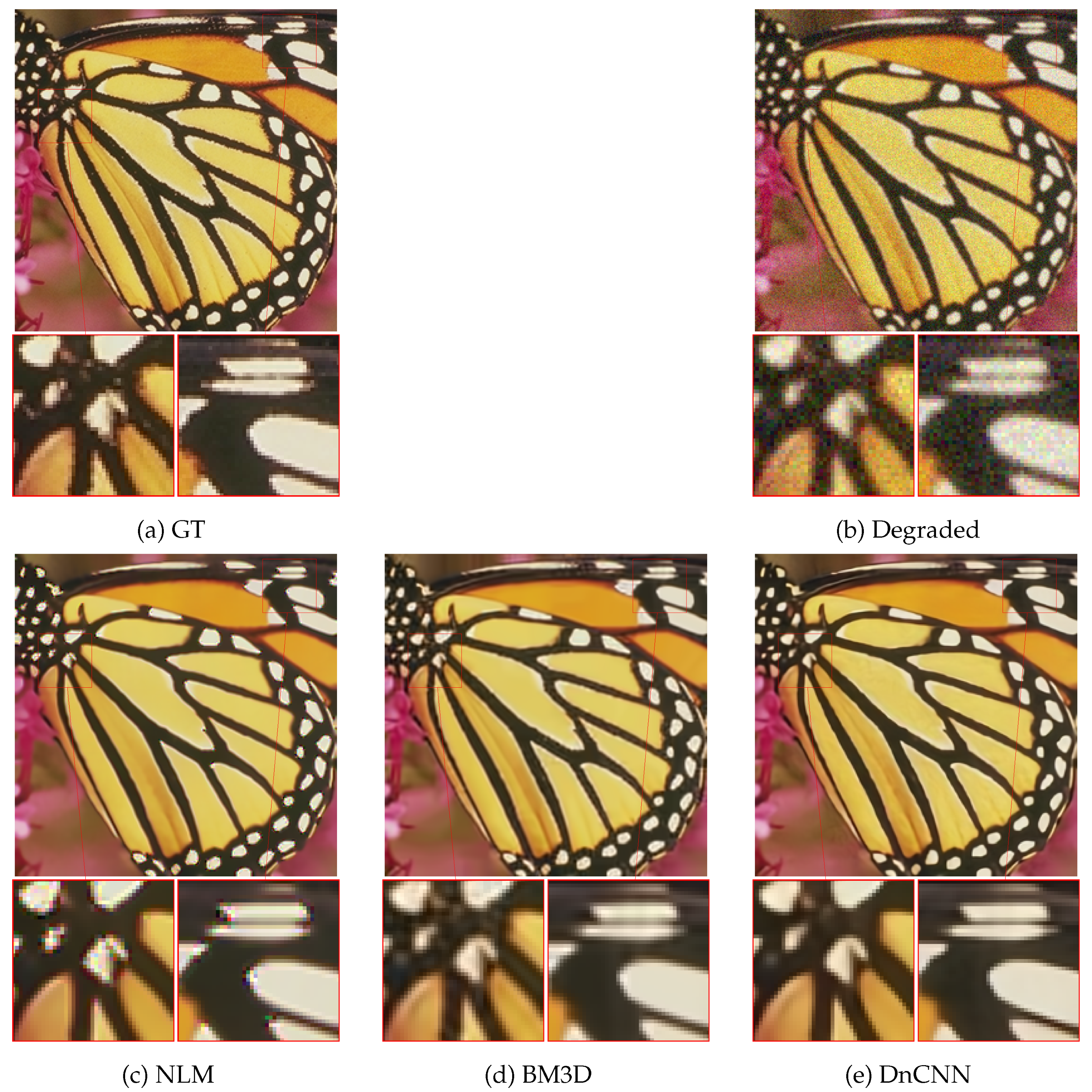
3.2. On the Choice of the Denoiser
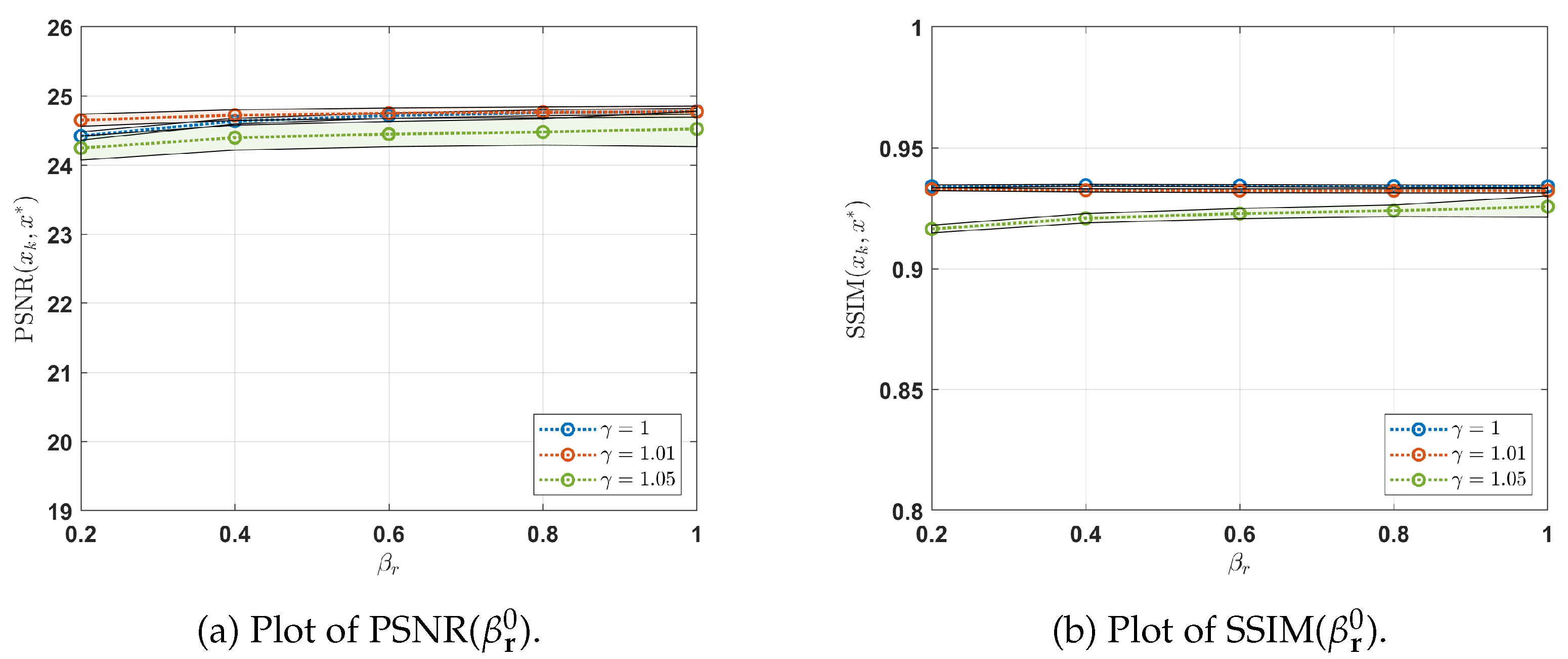
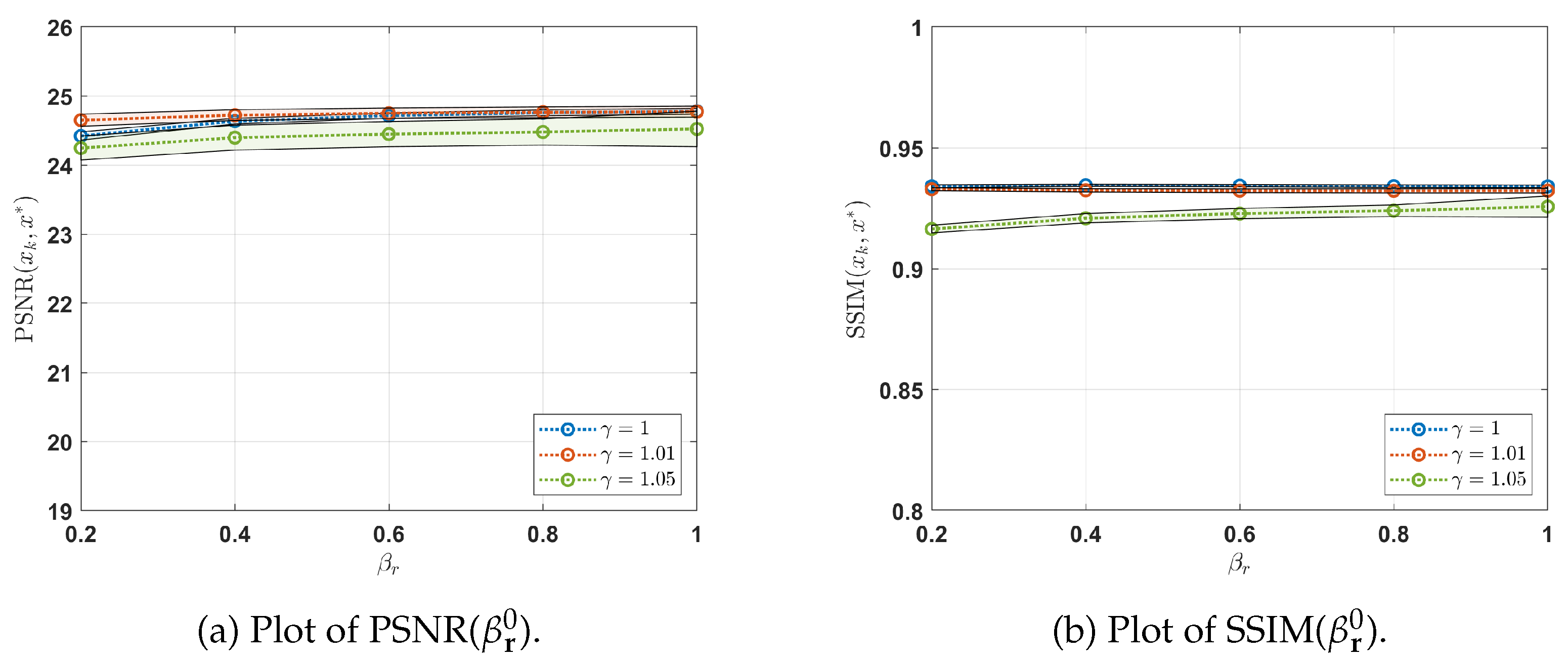
3.3. On the Choice of the Penalty Sequence for the Proposed CPnP
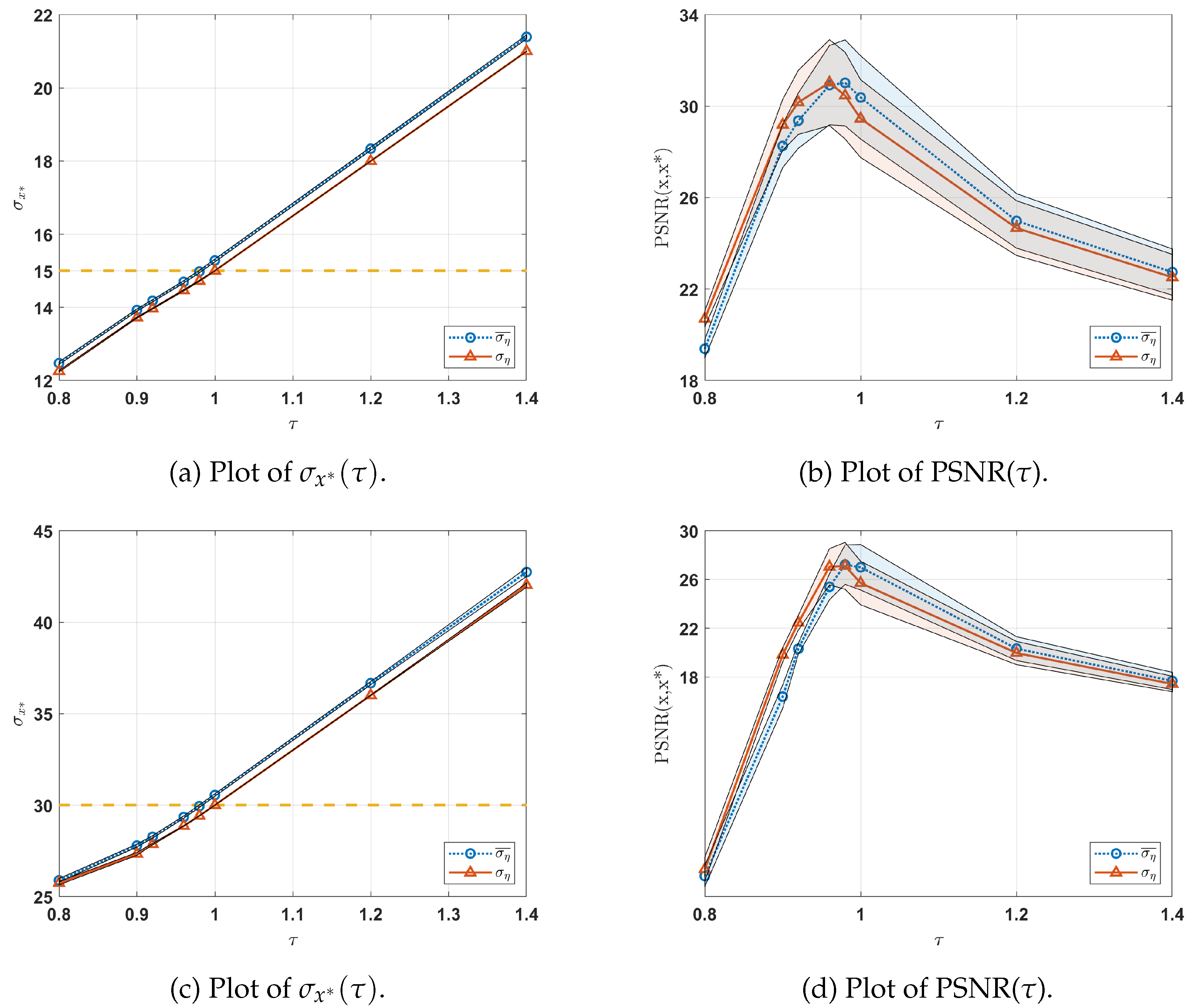
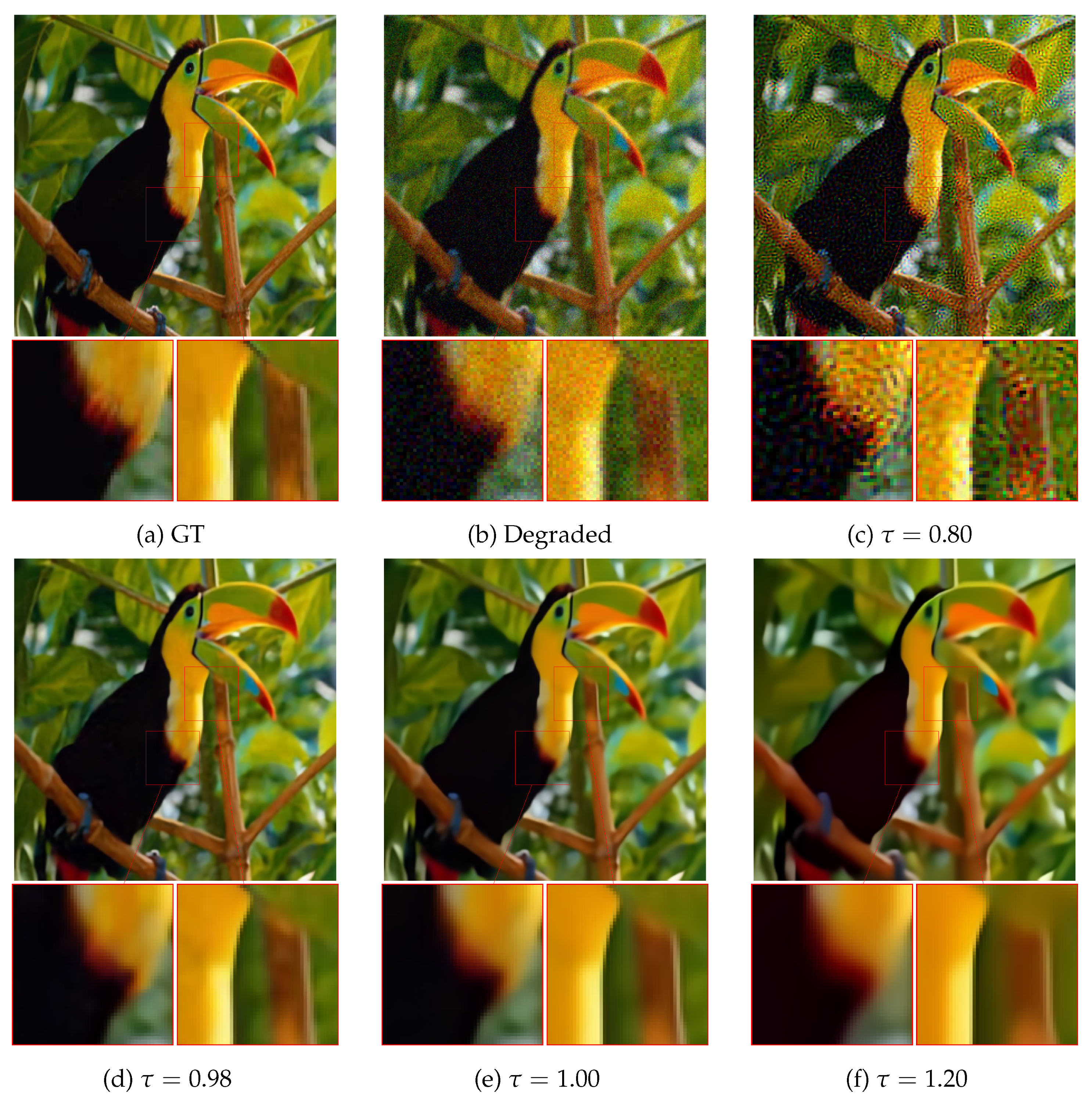
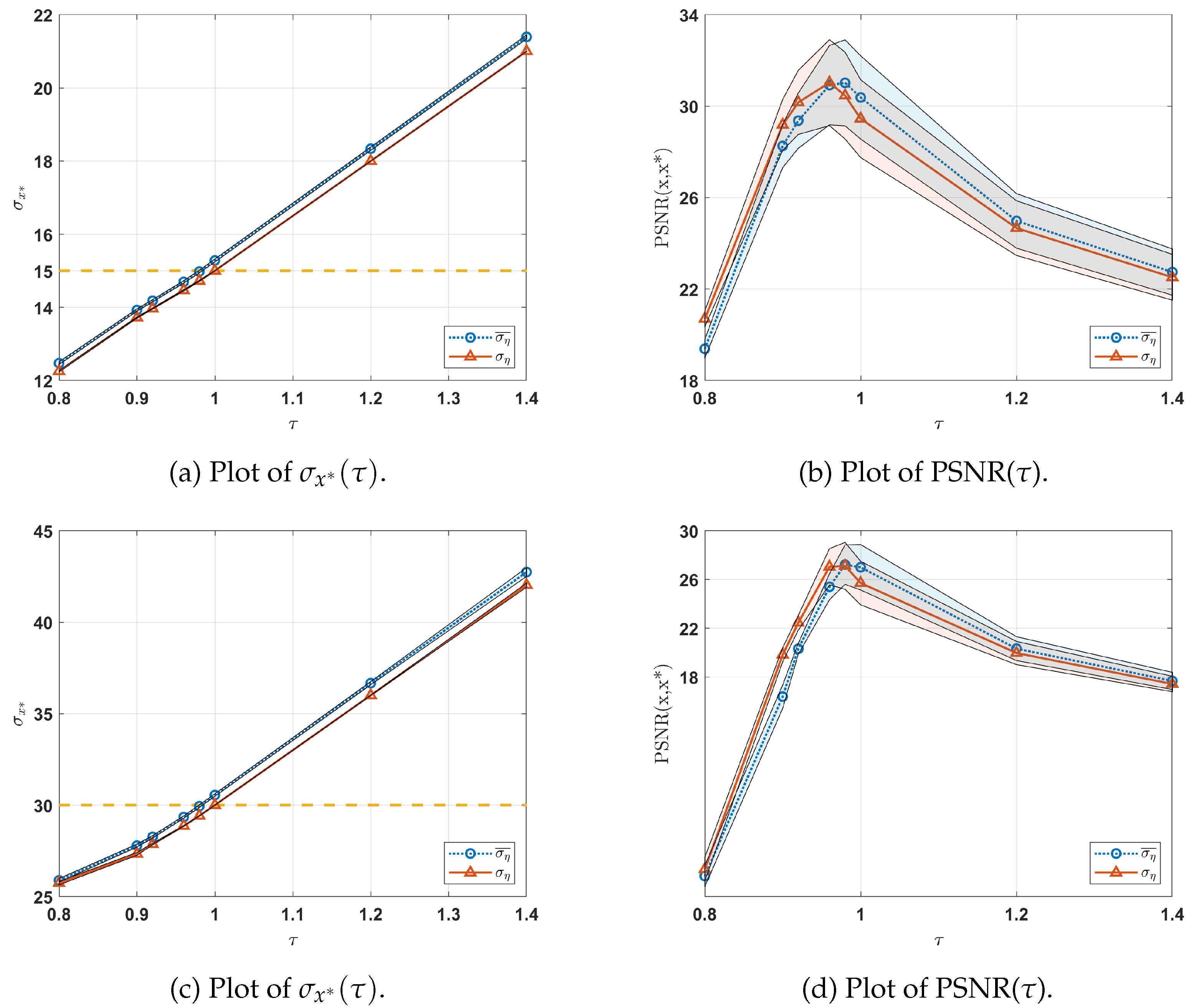
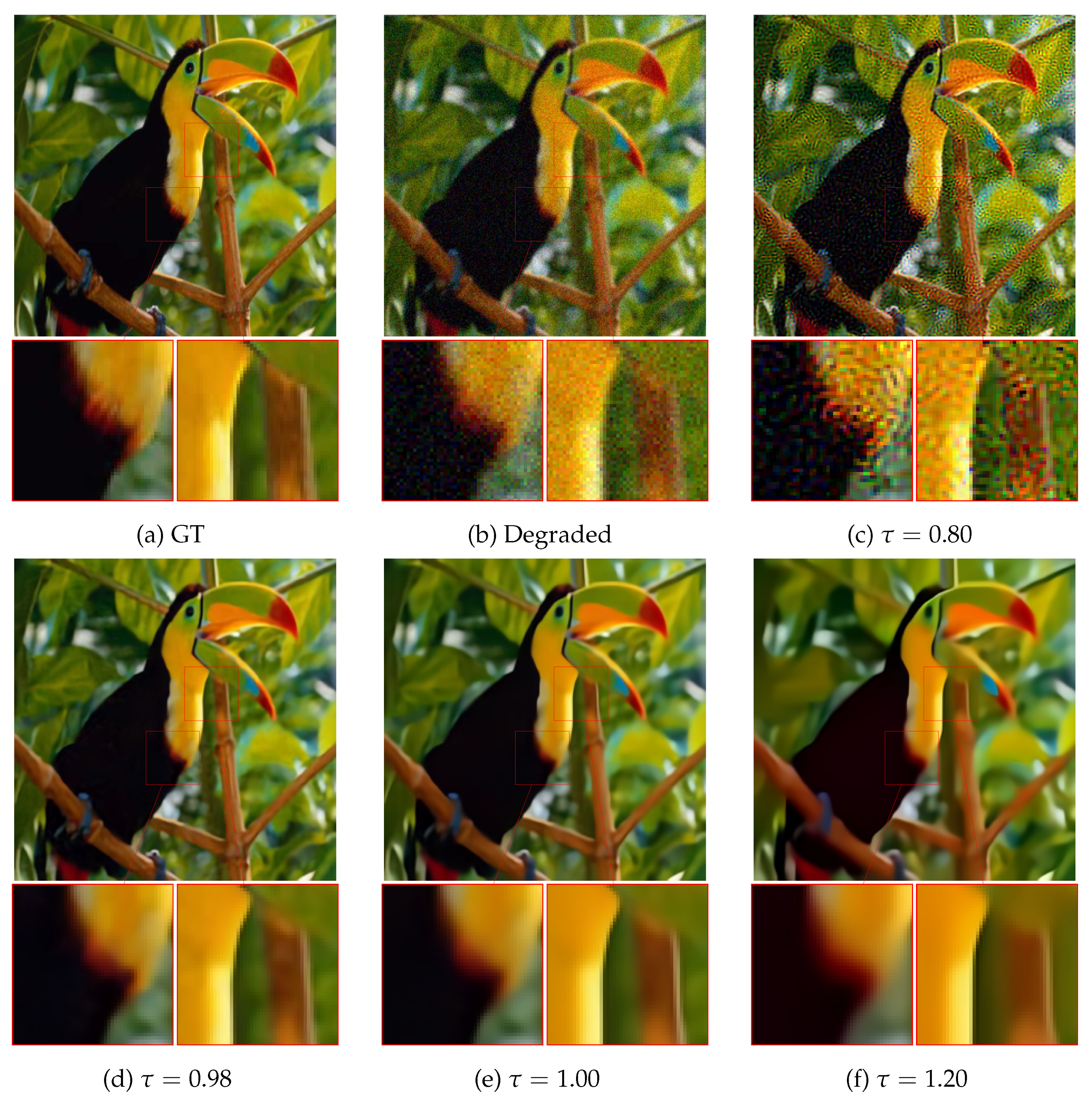
3.4. On the Choice of the Constraint Parameters for the Proposed CPnP
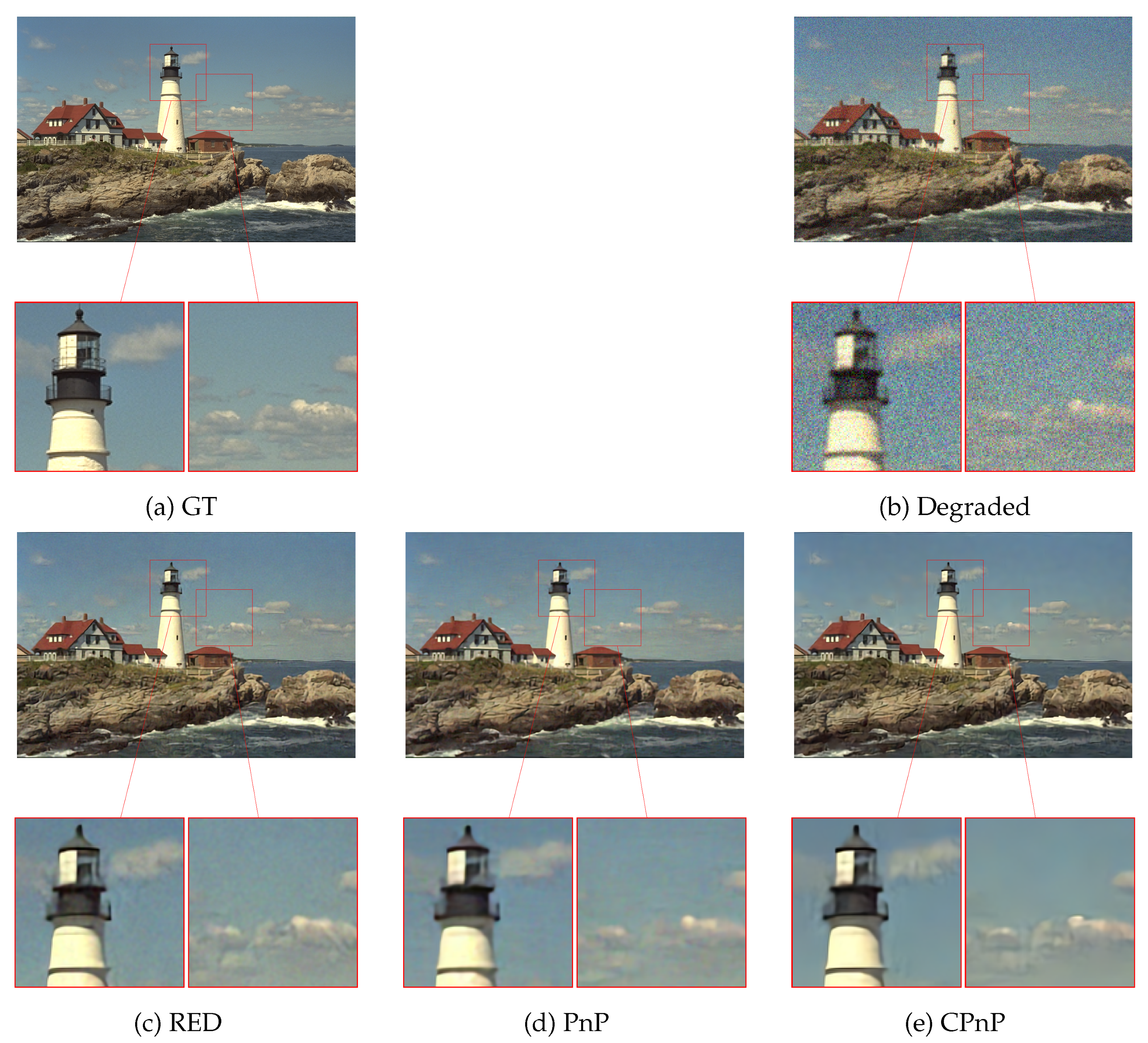
3.5. Comparisons with PnP and RED
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sapienza, D.; Franchini, G.; Govi, E.; Bertogna, M.; Prato, M. Deep Image Prior for medical image denoising, a study about parameter initialization. Front. Appl. Math. Stat. 2022, 8, 995225. [Google Scholar] [CrossRef]
- Cascarano, P.; Sebastiani, A.; Comes, M.C.; Franchini, G.; Porta, F. Combining Weighted Total Variation and Deep Image Prior for natural and medical image restoration via ADMM. In Proceedings of the 2021 21st International Conference on Computational Science and Its Applications (ICCSA), Cagliari, Italy, 13–16 September 2021; pp. 39–46. [Google Scholar]
- Coli, V.; Piccolomini, E.L.; Morotti, E.; Zanni, L. A fast gradient projection method for 3D image reconstruction from limited tomographic data. J. Physics Conf. Ser. 2021, 904, 012013. [Google Scholar] [CrossRef]
- Benfenati, A.; Causin, P.; Lupieri, M.; Naldi, G. Regularization Techniques for Inverse Problem in DOT Applications. J. Phys. Conf. Ser. 2020, 1476, 012007. [Google Scholar] [CrossRef]
- Calisesi, G.; Ghezzi, A.; Ancora, D.; D’Andrea, C.; Valentini, G.; Farina, A.; Bassi, A. Compressed sensing in fluorescence microscopy. Prog. Biophys. Mol. Biol. 2022, 168, 66–80. [Google Scholar] [CrossRef] [PubMed]
- Benfenati, A. upU-Net Approaches for Background Emission Removal in Fluorescence Microscopy. J. Imaging 2022, 8, 142. [Google Scholar] [CrossRef]
- Cascarano, P.; Comes, M.C.; Sebastiani, A.; Mencattini, A.; Loli Piccolomini, E.; Martinelli, E. DeepCEL0 for 2D single-molecule localization in fluorescence microscopy. Bioinformatics 2022, 38, 1411–1419. [Google Scholar] [CrossRef]
- Štěpán, J.; del Pino Alemán, T.; Bueno, J.T. Novel framework for the three-dimensional NLTE inverse problem. Astron. Astrophys. 2022, 659, A137. [Google Scholar] [CrossRef]
- Benfenati, A.; La Camera, A.; Carbillet, M. Deconvolution of post-adaptive optics images of faint circumstellar environments by means of the inexact Bregman procedure. A&A 2016, 586, A16. [Google Scholar] [CrossRef]
- Conroy, K.E.; Kochoska, A.; Hey, D.; Pablo, H.; Hambleton, K.M.; Jones, D.; Giammarco, J.; Abdul-Masih, M.; Prša, A. Physics of eclipsing binaries. V. General framework for solving the inverse problem. Astrophys. J. Suppl. Ser. 2020, 250, 34. [Google Scholar] [CrossRef]
- Bertero, M.; Boccacci, P. Introduction to Inverse Problems in Imaging; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Bertero, M.; Boccacci, P.; Ruggiero, V. Inverse Imaging with Poisson Data; IOP Publishing: Bristol, UK, 2018; pp. 2053–2563. [Google Scholar] [CrossRef]
- Benfenati, A.; Ruggiero, V. Image regularization for Poisson data. J. Phys. Conf. Ser. 2015, 657, 012011. [Google Scholar] [CrossRef]
- Di Serafino, D.; Landi, G.; Viola, M. Directional TGV-based image restoration under Poisson noise. J. Imaging 2021, 7, 99. [Google Scholar] [CrossRef]
- Bevilacqua, F.; Lanza, A.; Pragliola, M.; Sgallari, F. Whiteness-based parameter selection for Poisson data in variational image processing. Appl. Math. Model. 2023, 117, 197–218. [Google Scholar] [CrossRef]
- Bertero, M. Regularization methods for linear inverse problems. In Inverse Problems: Lectures Given at the 1st 1986 Session of the Centro Internazionale Matematico Estivo (CIME) Held at Montecatini Terme, Italy, May 28–June 5 1986; Springer: Berlin/Heidelberg, Germany, 2006; pp. 52–112. [Google Scholar]
- Zanni, L.; Benfenati, A.; Bertero, M.; Ruggiero, V. Numerical methods for parameter estimation in Poisson data inversion. J. Math. Imaging Vis. 2015, 52, 397–413. [Google Scholar] [CrossRef]
- Bevilacqua, F.; Lanza, A.; Pragliola, M.; Sgallari, F. Nearly exact discrepancy principle for low-count Poisson image restoration. J. Imaging 2021, 8, 1. [Google Scholar] [CrossRef]
- Mylonopoulos, D.; Cascarano, P.; Calatroni, L.; Piccolomini, E.L. Constrained and unconstrained inverse Potts modelling for joint image super-resolution and segmentation. Image Process. Line 2022, 12, 92–110. [Google Scholar] [CrossRef]
- Cascarano, P.; Franchini, G.; Kobler, E.; Porta, F.; Sebastiani, A. Constrained and unconstrained deep image prior optimization models with automatic regularization. Comput. Optim. Appl. 2023, 84, 125–149. [Google Scholar] [CrossRef] [PubMed]
- Wen, Y.W.; Chan, R.H. Parameter selection for total-variation-based image restoration using discrepancy principle. IEEE Trans. Image Process. 2011, 21, 1770–1781. [Google Scholar] [CrossRef] [PubMed]
- Golub, G.H.; Von Matt, U. Tikhonov Regularization for Large Scale Problems. In Scientific Computing: Proceedings of the Workshop, Hong Kong, 10–12 March 1997; Springer: Berlin/Heidelberg, Germany, 1997; pp. 3–26. [Google Scholar]
- Campagna, R.; Crisci, S.; Cuomo, S.; Marcellino, L.; Toraldo, G. Modification of TV-ROF denoising model based on Split Bregman iterations. Appl. Math. Comput. 2017, 315, 453–467. [Google Scholar] [CrossRef]
- Rudin, L.I.; Osher, S. Total variation based image restoration with free local constraints. In Proceedings of the 1st International Conference on Image Processing, Austin, TX, USA, 13–16 November 1994; Volume 1, pp. 31–35. [Google Scholar]
- Lingenfelter, D.J.; Fessler, J.A.; He, Z. Sparsity regularization for image reconstruction with Poisson data. In Computational Imaging VII; SPIE: Bellingham, WA, USA, 2009; Volume 7246, pp. 96–105. [Google Scholar]
- Cascarano, P.; Calatroni, L.; Piccolomini, E.L. Efficient ℓ0 Gradient-Based Super-Resolution for Simplified Image Segmentation. IEEE Trans. Comput. Imaging 2021, 7, 399–408. [Google Scholar]
- Szegedy, C.; Zaremba, W.; Sutskever, I.; Bruna, J.; Erhan, D.; Goodfellow, I.; Fergus, R. Intriguing properties of neural networks. arXiv 2013, arXiv:1312.6199. [Google Scholar]
- Gottschling, N.M.; Antun, V.; Adcock, B.; Hansen, A.C. The troublesome kernel: Why deep learning for inverse problems is typically unstable. arXiv 2020, arXiv:2001.01258. [Google Scholar]
- Antun, V.; Renna, F.; Poon, C.; Adcock, B.; Hansen, A.C. On instabilities of deep learning in image reconstruction and the potential costs of AI. Proc. Natl. Acad. Sci. USA 2020, 117, 30088–30095. [Google Scholar] [CrossRef]
- Arridge, S.; Maass, P.; Öktem, O.; Schönlieb, C.B. Solving inverse problems using data-driven models. Acta Numer. 2019, 28, 1–174. [Google Scholar] [CrossRef]
- Venkatakrishnan, S.V.; Bouman, C.A.; Wohlberg, B. Plug-and-play priors for model based reconstruction. In Proceedings of the 2013 IEEE Global Conference on Signal and Information Processing, Austin, TX, USA, 3–5 December 2013; pp. 945–948. [Google Scholar]
- Pendu, M.L.; Guillemot, C. Preconditioned Plug-and-Play ADMM with Locally Adjustable Denoiser for Image Restoration. SIAM J. Imaging Sci. 2023, 16, 393–422. [Google Scholar] [CrossRef]
- Cascarano, P.; Piccolomini, E.L.; Morotti, E.; Sebastiani, A. Plug-and-Play gradient-based denoisers applied to CT image enhancement. Appl. Math. Comput. 2022, 422, 126967. [Google Scholar] [CrossRef]
- Kamilov, U.S.; Mansour, H.; Wohlberg, B. A plug-and-play priors approach for solving nonlinear imaging inverse problems. IEEE Signal Process. Lett. 2017, 24, 1872–1876. [Google Scholar] [CrossRef]
- Hurault, S.; Kamilov, U.; Leclaire, A.; Papadakis, N. Convergent Bregman Plug-and-Play Image Restoration for Poisson Inverse Problems. arXiv 2023, arXiv:2306.03466. [Google Scholar]
- Romano, Y.; Elad, M.; Milanfar, P. The little engine that could: Regularization by denoising (RED). SIAM J. Imaging Sci. 2017, 10, 1804–1844. [Google Scholar] [CrossRef]
- Combettes, P.L.; Pesquet, J.C. Proximal splitting methods in signal processing. In Fixed-Point Algorithms for Inverse Problems in Science and Engineering; Springer: Berlin/Heidelberg, Germany, 2011; pp. 185–212. [Google Scholar]
- Chierchia, G.; Chouzenoux, E.; Combettes, P.L.; Pesquet, J.C. The Proximity Operator Repository. Available online: http://proximity-operator.net/index.html (accessed on 25 January 2024).
- Chan, S.H.; Wang, X.; Elgendy, O.A. Plug-and-Play ADMM for Image Restoration: Fixed-Point Convergence and Applications. IEEE Trans. Comput. Imaging 2017, 3, 84–98. [Google Scholar] [CrossRef]
- Sun, Y.; Wu, Z.; Xu, X.; Wohlberg, B.; Kamilov, U.S. Scalable plug-and-play ADMM with convergence guarantees. IEEE Trans. Comput. Imaging 2021, 7, 849–863. [Google Scholar] [CrossRef]
- Nair, P.; Gavaskar, R.G.; Chaudhury, K.N. Fixed-Point and Objective Convergence of Plug-and-Play Algorithms. IEEE Trans. Comput. Imaging 2021, 7, 337–348. [Google Scholar] [CrossRef]
- Cascarano, P.; Benfenati, A.; Kamilov, U.S.; Xu, X. Constrained Regularization by Denoising with Automatic Parameter Selection. IEEE Signal Process. Lett. 2024, 31, 556–560. [Google Scholar] [CrossRef]
- Immerkaer, J. Fast noise variance estimation. Comput. Vis. Image Underst. 1996, 64, 300–302. [Google Scholar] [CrossRef]
- Lin, T.; Ma, S.; Zhang, S. On the Global Linear Convergence of the ADMM with MultiBlock Variables. SIAM J. Optim. 2015, 25, 1478–1497. [Google Scholar] [CrossRef]
- Bevilacqua, M.; Roumy, A.; Guillemot, C.; Alberi-Morel, M.L. Low-complexity single-image super-resolution based on nonnegative neighbor embedding. In Proceedings of the 23rd British Machine Vision Conference (BMVC), Surrey, UK, 3–7 September 2012. [Google Scholar]
- Kodak Lossless True Color Image Suite. Available online: https://r0k.us/graphics/kodak/ (accessed on 25 January 2024).
- Zhang, K.; Zuo, W.; Gu, S.; Zhang, L. Learning Deep CNN Denoiser Prior for Image Restoration. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Dabov, K.; Foi, A.; Katkovnik, V.; Egiazarian, K. Image denoising by sparse 3-D transform-domain collaborative filtering. IEEE Trans. Image Process. 2007, 16, 2080–2095. [Google Scholar] [CrossRef]
- Buades, A.; Coll, B.; Morel, J.M. Non-local means denoising. Image Process. Line 2011, 1, 208–212. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Set5 () | |||
|---|---|---|---|
| Metric | NLM | BM3D | DnCNN |
| PSNR | 30.27 | 31.14 | 31.52 |
| SSIM | 0.90 | 0.91 | 0.92 |
| Set24 () | Set24 () | |||||
|---|---|---|---|---|---|---|
| Metric | RED | PnP | CPnP | RED | PnP | CPnP |
| PSNR | 26.29 | 26.70 | 26.85 | 26.59 | 26.92 | 27.16 |
| SSIM | 0.75 | 0.77 | 0.78 | 0.76 | 0.77 | 0.79 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benfenati, A.; Cascarano, P. Constrained Plug-and-Play Priors for Image Restoration. J. Imaging 2024, 10, 50. https://doi.org/10.3390/jimaging10020050
Benfenati A, Cascarano P. Constrained Plug-and-Play Priors for Image Restoration. Journal of Imaging. 2024; 10(2):50. https://doi.org/10.3390/jimaging10020050
Chicago/Turabian StyleBenfenati, Alessandro, and Pasquale Cascarano. 2024. "Constrained Plug-and-Play Priors for Image Restoration" Journal of Imaging 10, no. 2: 50. https://doi.org/10.3390/jimaging10020050
APA StyleBenfenati, A., & Cascarano, P. (2024). Constrained Plug-and-Play Priors for Image Restoration. Journal of Imaging, 10(2), 50. https://doi.org/10.3390/jimaging10020050