
Multi-Particle Tracking in Complex Plasmas Using a Simplified and Compact U-Net


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Experiment
3. U-Net Architecture
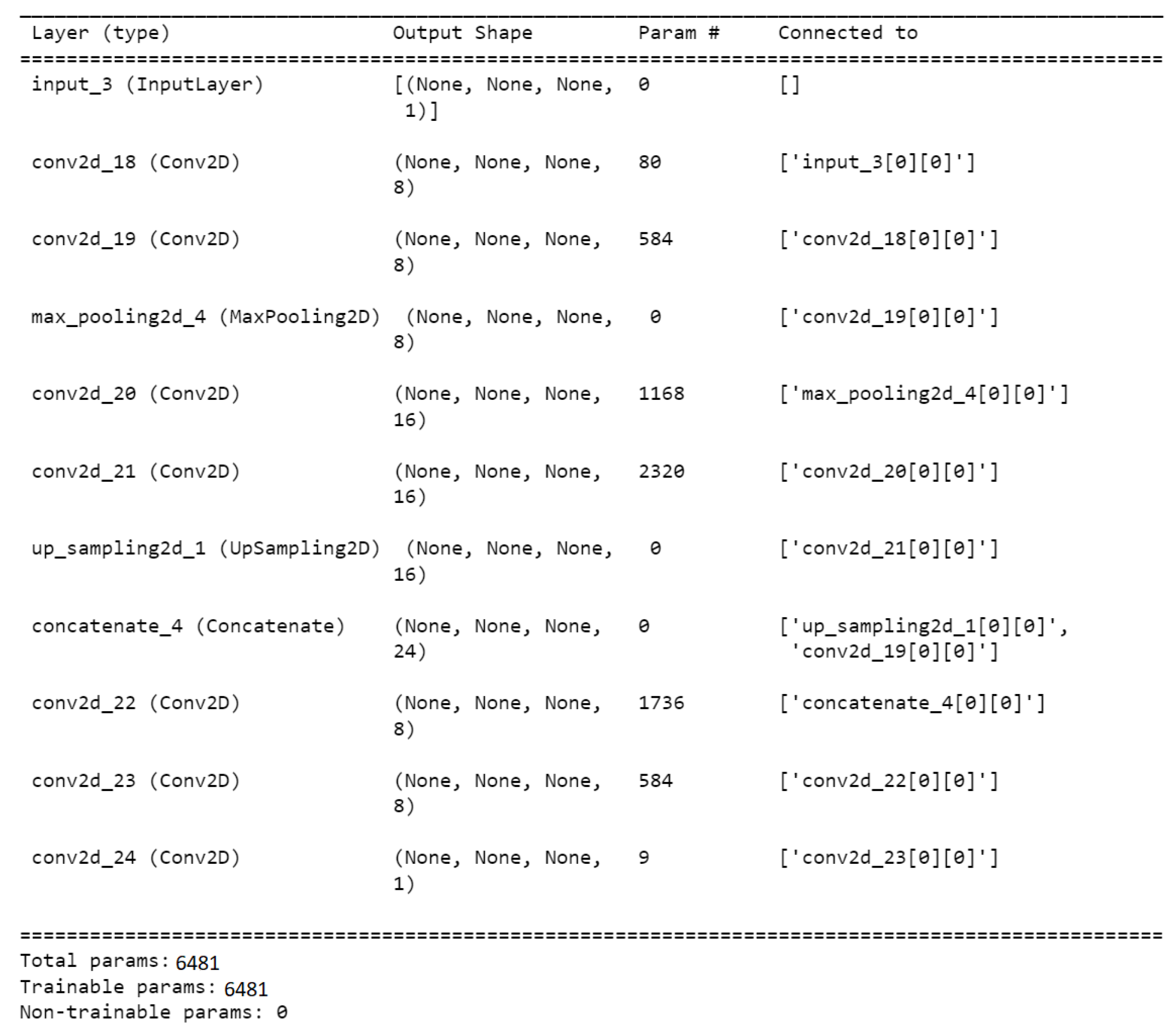
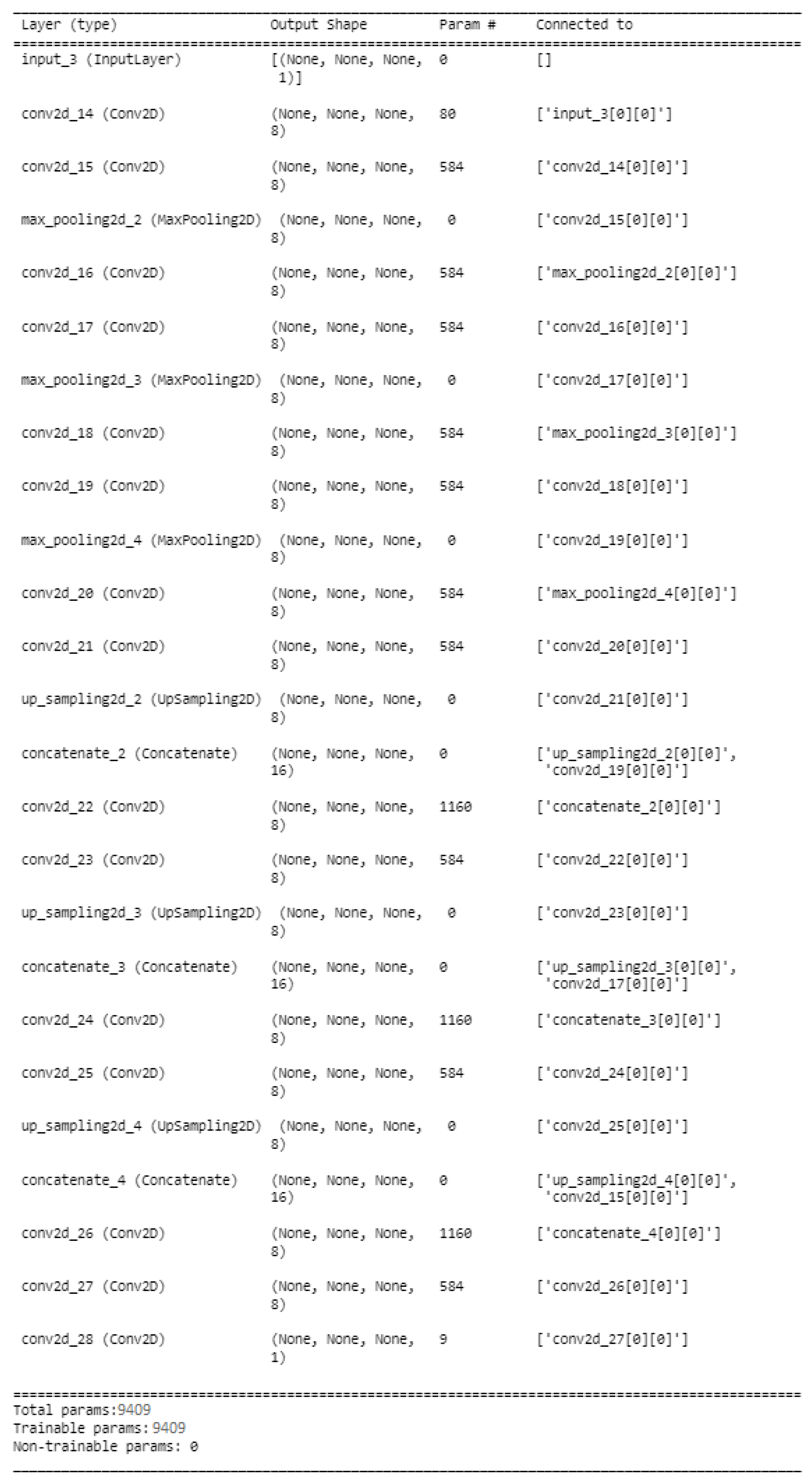
3.1. Simplifying the Architecture
3.1.1. Simplified U-Net 0
3.1.2. Simplified U-Net 1
3.1.3. Simplified U-Net 2
4. Network Training Details
5. Results on Artificial Data
6. Using the Trained Network on Experimental Data
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Stroth, U. Plasmaphysik: Phänomene, Grundlagen und Anwendungen, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Dietz, C.; Budak, J.; Kamprich, T.; Kretschmer, M.; Thoma, M.H. Phase transition in electrorheological plasmas. Contrib. Plasma Phys. 2021, 61, e202100079. [Google Scholar] [CrossRef]
- Pustylnik, M.Y.; Fink, M.A.; Nosenko, V.; Antonova, T.; Hagl, T.; Thomas, H.M.; Zobnin, A.V.; Lipaev, A.M.; Usachev, A.D.; Molotkov, V.I.; et al. Plasmakristall-4: New complex (dusty) plasma laboratory on board the International Space Station. Rev. Sci. Instrum. 2016, 87, 093505. [Google Scholar] [CrossRef] [PubMed]
- Dormagen, N.; Klein, M.; Thoma, M.H.; Schwarz, M. Machine Learning Approach for Multi Particle Tracking in Complex Plasmas. In Proceedings of the 2023 30th International Conference on Mixed Design of Integrated Circuits and System (MIXDES), Cracow, Poland, 29–30 June 2023; pp. 232–237. [Google Scholar] [CrossRef]
- Schwabe, M.; Rubin-Zuzic, M.; Räth, C.; Pustylnik, M. Image Registration with Particles, Examplified with the Complex Plasma Laboratory PK-4 on Board the International Space Station. J. Imaging 2019, 5, 39. [Google Scholar] [CrossRef] [PubMed]
- Mohr, D.P.; Knapek, C.A.; Huber, P.; Zaehringer, E. Algorithms for Particle Detection in Complex Plasmas. J. Imaging 2019, 5, 30. [Google Scholar] [CrossRef] [PubMed]
- Sankur, B. Survey over image thresholding techniques and quantitative performance evaluation. J. Electron. Imaging 2004, 13, 146. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Allan, D.; Caswell, T.; Keim, N.; van der Wel, C. Trackpy: Trackpy v0.3.2; Zenodo: Geneva, Switzerland, 2016. [Google Scholar] [CrossRef]
- Midtvedt, B.; Helgadottir, S.; Argun, A.; Pineda, J.; Midtvedt, D.; Volpe, G. Quantitative digital microscopy with deep learning. Appl. Phys. Rev. 2021, 8, 011310. [Google Scholar] [CrossRef]
- Midtvedt, B.; Pineda, J.; Skärberg, F.; Olsén, E.; Bachimanchi, H.; Wesén, E.; Esbjörner, E.K.; Selander, E.; Höök, F.; Midtvedt, D.; et al. Single-shot self-supervised object detection in microscopy. Nat. Commun. 2022, 13, 7492. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.; Schwabe, M.; Du, C.R. Identification of the Interface in a Binary Complex Plasma Using Machine Learning. J. Imaging 2019, 5, 36. [Google Scholar] [CrossRef] [PubMed]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the MICCAI 2015, Munich, Germany, 5–9 October 2015. [Google Scholar]
- Schmidt, U.; Weigert, M.; Broaddus, C.; Myers, G. Cell Detection with Star-convex Polygons. arXiv 2018, arXiv:.1806.03535. [Google Scholar] [CrossRef]
- Himpel, M.; Melzer, A. Fast 3D particle reconstruction using a convolutional neural network: Application to dusty plasmas. Mach. Learn. Sci. Technol. 2021, 2, 045019. [Google Scholar] [CrossRef]
- Rose, A. Vision: Human and Electronic, 3rd ed.; Optical Physics and Engineering; Plenum Press: New York, NY, USA, 1977. [Google Scholar]
- Desislavov, R.; Martínez-Plumed, F.; Hernández-Orallo, J. Compute and Energy Consumption Trends in Deep Learning Inference. Sustain. Comput. Inform. Syst. 2023, 38, 100857. [Google Scholar] [CrossRef]
- Pineda, J.; Midtvedt, B.; Bachimanchi, H.; Noé, S.; Midtvedt, D.; Volpe, G.; Manzo, C. Geometric deep learning reveals the spatiotemporal fingerprint of microscopic motion. arXiv 2022, arXiv:2202.06355. [Google Scholar] [CrossRef]
- Yaroshenko, V.; Pustylnik, M. Possible Mechanisms of String Formation in Complex Plasmas at Elevated Pressures. Molecules 2021, 26, 308. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dormagen, N.; Klein, M.; Schmitz, A.S.; Thoma, M.H.; Schwarz, M. Multi-Particle Tracking in Complex Plasmas Using a Simplified and Compact U-Net. J. Imaging 2024, 10, 40. https://doi.org/10.3390/jimaging10020040
Dormagen N, Klein M, Schmitz AS, Thoma MH, Schwarz M. Multi-Particle Tracking in Complex Plasmas Using a Simplified and Compact U-Net. Journal of Imaging. 2024; 10(2):40. https://doi.org/10.3390/jimaging10020040
Chicago/Turabian StyleDormagen, Niklas, Max Klein, Andreas S. Schmitz, Markus H. Thoma, and Mike Schwarz. 2024. "Multi-Particle Tracking in Complex Plasmas Using a Simplified and Compact U-Net" Journal of Imaging 10, no. 2: 40. https://doi.org/10.3390/jimaging10020040
APA StyleDormagen, N., Klein, M., Schmitz, A. S., Thoma, M. H., & Schwarz, M. (2024). Multi-Particle Tracking in Complex Plasmas Using a Simplified and Compact U-Net. Journal of Imaging, 10(2), 40. https://doi.org/10.3390/jimaging10020040