Abstract
Accurate state of charge (SOC) estimation is helpful for battery management systems to extend batteries’ lifespan and ensure the safety of batteries. However, due to the pseudo-positive definiteness of the covariance matrix and noise statistics error accumulation, the SOC estimation of lithium-ion batteries is usually inaccurate or even divergent using Kalman filters, such as the unscented Kalman filter (UKF) and the square-root unscented Kalman filter (SRUKF). To resolve this problem, an SOC estimation method based on the dual-coefficient tracking improved square-root unscented Kalman filter for lithium-ion batteries is developed. The method is composed of an improved square-root unscented Kalman filter (ISRUKF) and a dual-coefficient tracker. To avoid the divergence of SOC estimation due to the covariance matrix with pseudo-positive definiteness, an ISRUKF based on the QR decomposition covariance square-root matrix is presented. Moreover, the dual-coefficient tracker is designed to track and correct the state noise error of the battery, which can reduce the SOC estimation error caused by the accumulation of the battery model error using the ISRUKF. The accuracy and robustness of the SOC estimation method using the developed method are validated by the comparison with the UKF and SRUKF. The developed algorithm shows the highest SOC estimation accuracy with the SOC error within 1.5%.
1. Introduction
Lithium-ion batteries have been widely used in electric vehicles and battery energy storage [1,2] due to the advantages of a high energy density, long cycle life, and low self-discharge rate [3,4,5]. The battery management system is indispensable to the monitoring and estimation of the critical internal states of lithium-ion batteries [6]. Furthermore, state of charge (SOC) estimation is one of the battery management system’s most important state parameters [7,8,9]. Accurate SOC estimation helps the battery management system to optimize the operation characteristics, eliminating potential safety risks and prolonging the batteries’ lifespan [10]. However, it is difficult to accurately estimate the SOC in complex driving environments due to the nonlinear electrochemical performance of lithium-ion batteries and the SOC immeasurability [11].
Recently, other literature has been published to accurately estimate the SOC for lithium-ion batteries. In general, the SOC estimation method can be classified into four groups: the looking-up table-based method, ampere-time integration method, data-driven method, and model-based method [12]. In the looking-up table-based method, the initial SOC value is determined by the open-circuit voltage (OCV) collected using the battery management system, and the SOC value is attained by the SOC-OCV correspondence table via the subsequent OCV measurement value [13]. However, it is more suitable for application in a laboratory environment because of its drawbacks, such as being time-consuming and susceptible to external environment influences in batteries’ temperature and aging conditions. The ampere-time integration method estimates the SOC by integrating the currents flowing into and out of the batteries over time. The SOC estimation based on this method depends on SOC initial errors and current measurement errors, which results in increasing SOC estimation errors [14,15,16]. Data-driven methods—such as the neural network method [17], support vector machine method [18], and Bayesian network method [19,20]—are studied to accurately estimate the SOC for a nonlinear system.
These methods are not suitable for practical SOC estimation online, though, due to the requirements of an enormous amount of training data and the high calculation cost. Model-based methods consisting of the batteries’ equivalent circuit model (ECM) and a filter—such as a Kalman filter (KF) and particle filter (PF)—are attracting extensive attention and becoming one of the most popular algorithms to accurately estimate the SOC for lithium-ion batteries [21].
Compared with the PF, which requires many particles to calculate the posterior probability density, the KF can reduce the number of sampled particles and ensure the accuracy requirements with the help of deterministic sampling. The standard KF is a widely used linear filter but has poor adaptability to nonlinear time-varying systems [22]. As an improved method of the KF, the extended Kalman filter (EKF) can be used in nonlinear time-varying systems. However, the SOC estimation accuracy using the EKF is degraded due to its requirements of the Jacobian matrix calculation and a linearized approximation of the nonlinear time-varying function using the first-order terms of the Taylor formula, which does not consider the higher-order terms of the Taylor formula [23].
To resolve the disadvantages of the KF and the EKF noted above, the unscented Kalman filter (UKF) is presented to estimate the SOC [24]. The UKF based on unscented transform does not need to linearize system equations without accounting for the higher-order terms of the Taylor formula, and the UKF shows higher SOC estimation accuracy than the EKF. SOC estimation using the UKF will be divergent because of its drawbacks, such as the pseudo-positive definiteness of the covariance matrix caused by the error accumulation in the UKF. To resolve these shortcomings, the square-root unscented Kalman filter (SRUKF) is presented to estimate the batteries’ SOC [25,26,27,28,29]. Compared to the UKF, the SRUKF uses the state covariance square-root matrix instead of the state covariance matrix, which can overcome the problem of the pseudo-positive definiteness of the covariance matrix. The SOC estimation accuracy based on the SRUKF will be reduced because the SRUKF needs to use the Cholesky decomposition method to achieve the state covariance square-root matrix.
Moreover, the SOC estimation accuracy based on the KF mentioned above is greatly degraded by unknown or inaccurate noise statistics, such as the measurement and model noise covariance of the batteries [30]. In the iteration process of these KFs, the calculation accuracy of the system covariance matrix is dependent on the accurate noise statistics. The error accumulation of noise statistics will be generated in the iteration process, which leads to the divergence of the KFs. An adaptive EKF based on the combination of adaptive modification and the EKF is proposed to avoid the divergence of the algorithm error [31]. Based on the UKF and an adaptive noise estimator established by noise covariance matching, an adaptive unscented Kalman filter (AUKF) is developed to estimate the SOC. The SOC estimation accuracy using the AUKF is improved for the battery system with uncertain noise statistics [32], but its accuracy is still degraded because of not considering the state noise error accumulative calculation in the iteration process of the AUKF.
As mentioned above, the discharging and charging process of lithium-ion batteries is a nonlinear electrochemical reaction process. It is difficult to accurately attain the SOC of lithium-ion batteries due to their nonlinear operating characteristics. Model-based methods consisting of the KF and its improved algorithms, such as the UKF, the AUKF, and the SRUKF, are widely used to estimate the SOC of the batteries. However, the estimated SOC using these KFs will be divergent due to their drawbacks, such as the pseudo-positive definiteness of the covariance matrix in the UKF and the Cholesky decomposition in the SRUKF. Moreover, the SOC estimation accuracy is degraded by the inaccurate model noise covariance and its accumulative error of the batteries using these model-based methods, including the UKF, the SRUKF, and the AUKF. To solve these problems, a dual-coefficient tracking ISRUKF is developed to achieve accurate SOC estimation for lithium-ion batteries with uncertain noise statistics. The innovation of the developed method includes the following: (1) To avoid the divergence of SOC estimation due to the pseudo-positive definiteness of the state covariance matrix, the ISRUKF based on the QR decomposition method of the state covariance square-root matrix is presented. (2) A dual-coefficient tracker based on the strong tracking filter (STF) is designed to track and correct the state noise error accumulation of the battery, which can reduce the SOC estimation error caused by the batteries’ model error accumulation using the UKF and the ISRUKF. (3) An SOC estimation method based on the ISRUKF and the dual-coefficient tracker is developed for lithium-ion batteries with uncertain noise statistics.
The rest of this paper is organized as follows: Section 2 introduces the construction of the ECM and its state space equation of lithium-ion batteries; Section 3 presents the developed SOC estimation method based on dual-coefficient tracking ISRUKF, including the ISRUKF and the dual-coefficient tracker; Section 4 shows the accuracy and robustness of the developed SOC estimation method by the comparison of the simulation results and the experimental data in different conditions; and Section 5 discusses the conclusions.
2. Equivalent Circuit Model and State Space Equation of Lithium-Ion Batteries
2.1. Equivalent Circuit Model of the Batteries
Since it can accurately describe the dynamic characteristics of the batteries [33], an ECM based on a two-order RC circuit in this paper is shown in Figure 1. describes the open circuit voltage of the batteries; represents the batteries’ internal resistance; illustrates the concentration resistance; is the concentration capacitance; represents the electrochemical resistance; means the electrochemical capacitance; is the current of the batteries; and is the terminal voltage of the batteries that is connected to the loads.
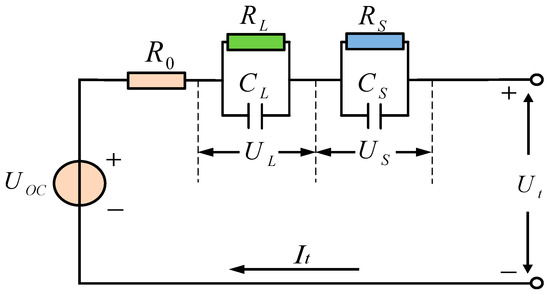
Figure 1.
Equivalent circuit model of the batteries.
As shown in Figure 1, according to Kirchhoff’s voltage law, the functional relationship between the terminal voltage and the current of the batteries can be expressed as:
where represents the electrochemical voltage of the batteries, and means the concentration voltage of the batteries.
In the ECM of the batteries, according to the experimental data of the batteries in the charging and discharging process, the nonlinear functional relationship between , , , , , and the SOC can be achieved by the least-squares-error curve-fitting method, which can be represented as:
where , , , , , and are the coefficients, which can be obtained by the least-squares-error curve-fitting method via the experimental data.
The SOC, which represents the percentage of the current battery capacity in the total battery capacity, can be expressed as:
where means the initial value of , shows coulomb efficiency, and denotes the nominal capacity.
2.2. State Space Equation of the Battery Model
To describe the battery model in state space equations, the SOC, the electrochemical voltage and the concentration voltage are selected as battery state variables. The is chosen as the input variables of the batteries, and the is assumed to be the output variables of the batteries. According to the SOC expression in (8) and the batteries’ ECM as shown in Figure 1, the state space equation of the batteries in discrete time can be written as:
where represents the sampling time; illustrates the time constant, , and ; and is the state noise.
Moreover, the measurement equation of the batteries in discrete time can be expressed as:
where is the measurement noise.
3. SOC Estimation Based on the Dual-Coefficient Tracking ISRUKF
Due to not considering the higher-order terms of the Taylor formula, the SOC estimation based on the EKF is inaccurate. Compared to using the EKF, the SOC estimation accuracy is higher using the UKF since it does not require the Jacobian matrix calculation. However, the UKF’s SOC estimation accuracy and stability are degraded given the pseudo-positive definiteness of the covariance matrix and the inaccurate noise statistics. The SRUKF based on the Cholesky decomposition method can partly reduce the influence of the pseudo-positive definiteness of the covariance matrix in the iteration process, but the SRUKF does not completely resolve the problem of pseudo-positive definiteness due to its nonlinear state calculation.
In this paper, a dual-coefficient tracking ISRUKF is developed to improve SOC estimation accuracy in two ways. First, the ISRUKF based on the QR decomposition method can overcome the problem of the pseudo-positive definiteness of the covariance matrix in the UKF and the SRUKF. Second, a dual-coefficient tracker based on the STF is designed to track and correct the batteries’ state noise error. In the dual-coefficient tracker, the tracking coefficient of state noise is used to adaptively track and correct the state noise error, and the fading factor of the STF is used to track and adjust the state covariance square-root matrix. The diagram of the developed ISRUKF is shown in Figure 2.
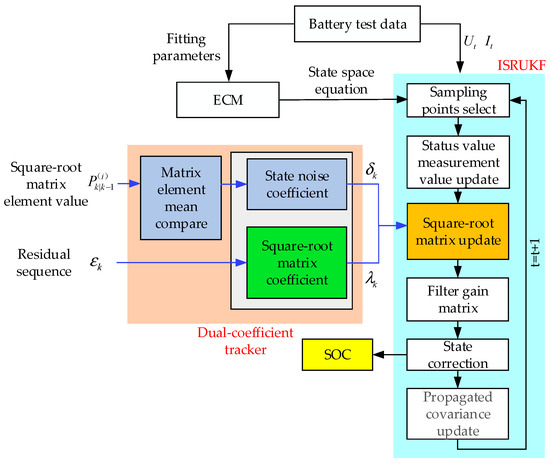
Figure 2.
Diagram of the developed ISRUKF.
3.1. Improved Square-Root Unscented Kalman Filter (ISRUKF)
3.1.1. Standard SRUKF
For a nonlinear discrete time system, the system state equation and the system measurement equation can be described as:
where is the system state vector; is the system measurement vector; and denote the nonlinear state and measurement models, respectively; is the system input vector; and are the system state noise and measurement noise, respectively, and their statistics characteristics can be expressed as:
where r and q denote the mean value of and separately. R and Q denote the covariance value of and , respectively. The detailed steps of the SRUKF can be summarized as follows:
- (1)
- Initialize the mean (x0) and the state covariance square root () of the system state:
- (2)
- Assign weights and obtain sampling points:
The weighted coefficients can be expressed as
where is the variance weight factor; is the mean weight factor; and is the error magnitude of the higher-order term.
- (3)
- Time update for the system states:
- a.
- Update the sample point:
- b.
- Estimate the system state:
- c.
- Update the covariance of the estimated state:where is the updated state calculation value; () is the QR decomposition; Sk|k−1 is the state covariance square-root matrix; and () is the Cholesky decomposition.
- (4)
- Measurement update:
- a.
- Attain the measurement:
- b.
- Update the measurement:
- (5)
- Calculate the SRUKF gain matrix L:where is the mutual covariance, as shown in Formula (24), and is the measurement covariance square-root matrix, as shown in Formula (26).where is the updated calculation measurement.
- (6)
- Measurement correction:
- a.
- Update the estimated state:
- b.
- Update the propagated covariance:where is the state covariance square-root optimal estimation matrix.
3.1.2. The ISRUKF Based on the QR Decomposition Method
As seen from Formula (20) in the standard SRUKF, the SRUKF requires the Cholesky decomposition to obtain the state covariance square-root matrix . Due to the matrix computation errors in the Cholesky decomposition, the SRUKF estimation accuracy will be degraded by the pseudo-positive definiteness of the . To solve this problem, the ISRUKF based on the QR decomposition method is developed in this paper. The detailed core concept of the ISRUKF based on the QR decomposition method is presented as follows.
The formula of the state covariance matrix can be described as
Then, the formula of the state covariance matrix Pk/k−1 and the state covariance square-root matrix is presented as
we set ; then
where qk is the upper triangular matrix, and is the orthogonal matrix.
By combining Formulas (30) and (31), the following formula can be obtained
Substitute Formula (32) with Formula (20), which can effectively avoid the pseudo-positive qualitative problem existing in the standard SRUKF.
Similarly, Formulas (26) and (28) can be replaced by
where e is the identity matrix of order n, and is the coefficient matrix of the measurement function, which can be expressed as
3.2. The Dual-Coefficient Tracker Based on the Strong Tracking Filter
3.2.1. Strong Tracking Filter
The STF is used to attain the fading factor to update the state covariance square-root matrix in the iterative of the ISRUKF. The fading factor can be attained as
where is the fading factor, which is also the tracking coefficient of the state covariance square-root matrix,,, whose dimension is n columns, and , which is described as
where trace() is the trace of the corresponding matrix, and is the covariance of the residual sequence of outputs and can be expressed as
where is the forgetting factor, and its range is set as 0.95~0.99; is the output residual sequence, and .
3.2.2. The State Noise Tracking Coefficient
In Formula (32), the state covariance square-root matrix is directly affected by the . If the diverges, the will further diverge. In this paper, the variation of the matrix elements of the based on its historical data is used to reflect the variation trend of . The updated state covariance square-root matrix can be expressed as
where is the corrected state covariance square-root matrix at time k, and is the state noise tracking coefficient, whose dimension is n columns. is the matrix element of the state noise tracking coefficient. Its value is attained by comparing the element mean value of the state covariance square-root matrix in the iteration process. The assignment process of is described as follows:
- (1)
- Initialize the and its dimension to n columns.
- (2)
- is set as an element in the row and column of the state covariance square-root matrix at time k. We set the mean of the elements in m adjacent square-root matrices as a parameter and definite A and B as the pairwise comparisons between adjacent parameters, which can be described as
By comparing A and B, six outcomes will be attained:
- (3)
- Attain the updated . If the outcome does not match outcome (II) or outcome (V), the should not be modified. If the calculated result matches outcome (II) or outcome (V), the should be reassigned. If the value of is higher than 2% of the , the is judged to be too large, and the state noise tracking coefficient should be shrunk, and then the value should be assigned. If the value is less than 2% of the , the is judged to be too small, and the state noise tracking coefficient should be amplified, and then the value should be assigned, where is the correction coefficient.
- (4)
- According to and Formula (39), we can get the state noise tracking coefficient .
- (5)
- The and are used as inputs to form the dual-coefficient tracker.
- (6)
- The dual-tracking coefficient and are put into the ISRUKF to calculate the updated state covariance square-root matrix , which can be illustrated as
Figure 3 shows the diagram of the dual-coefficient tracker.
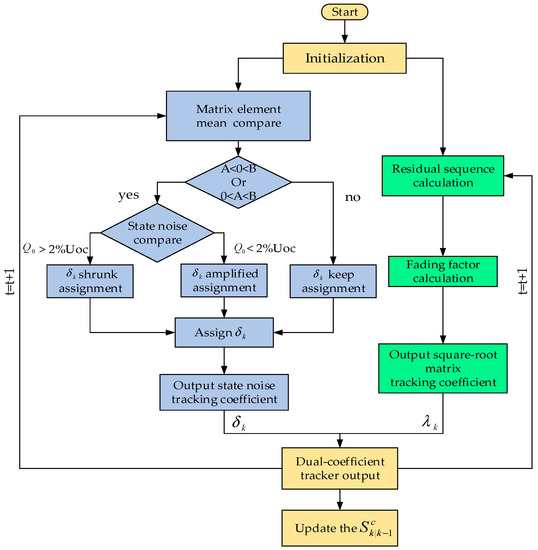
Figure 3.
Diagram of dual-coefficient tracker.
3.3. Battery SOC Estimation Procedure Based on Dual-Coefficient Tracking ISRUKF
According to the above analysis, the flow diagram of the battery SOC estimation based on the developed method shown in Figure 4 can be expressed as follows:
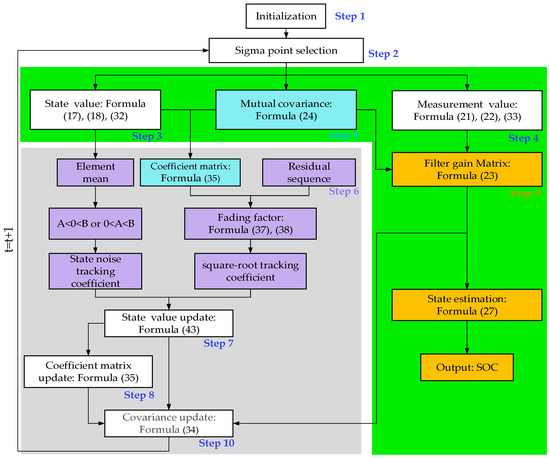
Figure 4.
Flow diagram of the battery SOC estimation based on the developed method.
Step 1: Initialize the mean (x0) and the state covariance square root () by Formula (13), and initialize the and ;
Step 2: Assign weights and and obtain sampling points by Formulas (14) and (16);
Step 3: Time update for the state estimation , , and by Formulas (17), (18) and (32);
Step 4: Measurement update , , and by Formulas (21), (22), and (33);
Step 5: Calculate the mutual covariance by Formula (24) and estimate the coefficient matrix of measurement function by Formula (35);
Step 6: Calculate the by Formulas (36), (37) and (38); attain the mean values of the state covariance square-root matrix by Formulas (40) and (41) and compare A and B by Formula (42) to determine the assignment of ;
Step 7: The and are substituted into Formula (43) to update the state covariance square-root matrix ;
Step 8: Use to update the coefficient matrix of the measurement function by Formula (35);
Step 9: Calculate the filtering gain matrix by Formula (23) and the output estimation of the SOC by Formula (27);
Step 10: Attain the state covariance square-root optimal estimation matrix by the updated state covariance square-root matrix and the update coefficient matrix of the measurement function via Formula (34) and start the next iteration process.
4. Simulation and Experimental Results and Analysis
4.1. Test Platform and Experiment Parameters
The test platform shown in Figure 5 consists of an Arbin-BT2000 battery test system, lithium-ion batteries, and a computer. The battery test system is used for the testing of the batteries to attain battery parameters, such as the battery current, voltage, charge capacity, discharge capacity, internal resistance, etc. The single-channel voltage measurement range of the battery test system is 0~5 V, and the resolution of the measured voltage is ±0.01% of the full scale. The computer can record and process experimental data including the battery voltage, current, internal resistance, etc. Lithium-ion batteries are connected to the battery test system and can be continuously charged and discharged.
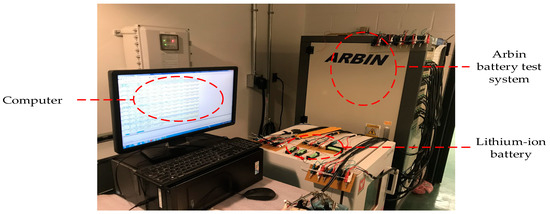
Figure 5.
Schematic of the lithium-ion battery test platform.
To validate the SOC estimation accuracy using the developed ISRUKF, three test schedules were conducted via some comparisons of simulation results with experimental data in the discharging process. In each test, the battery simulation and experiment were carried out at the temperature of 25 °C. The batteries were discharged with the initial SOC of 0.9 and were ended when the SOC was 0.2. The simulation and experimental parameters of batteries are listed in Table 1.

Table 1.
The coefficients of battery performance parameters.
4.2. Comparison of SOC Estimation Accuracy Using the Developed ISRUKF, SRUKF, and UKF with Different Covariance
In this section, the comparison of SOC estimation accuracy between the developed ISRUKF, SRUKF, and UKF is carried out when the is 0.005 and 0.01, respectively, to verify the accuracy of the developed ISRUKF. Figure 6 shows the comparative results of the SOC and battery voltage using the three algorithms when the is set as 0.005.
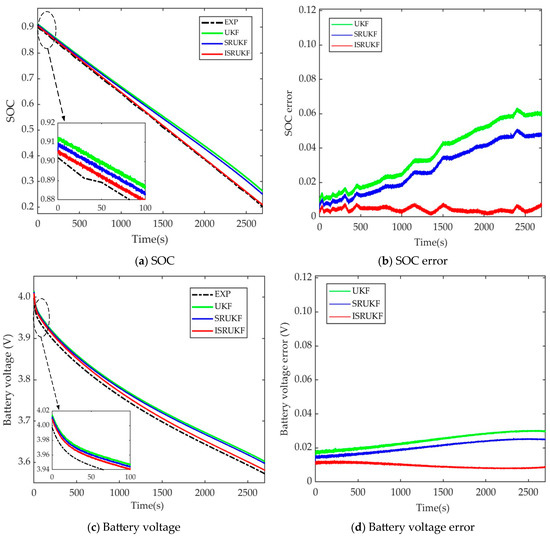
Figure 6.
SOC estimation results using three different algorithms when the is set as 0.005.
Figure 6a,b show the SOC experiment and estimation results and the corresponding absolute errors by the different methods. The UKF, SRUKF, and developed ISRUKF can be used to estimate the SOC with different estimation accuracy. Compared to the UKF and the SRUKF, the developed ISRUKF shows the highest SOC estimation accuracy in the discharging process.
As shown in Figure 6b, the SOC estimation errors using the developed ISRUKF are constantly kept below 0.01 given its dual-coefficient tracker, which can reduce state noise accumulative calculation errors. The SOC estimation errors using the UKF and SRUKF gradually increase from 0.01 to 0.06, even to divergence. Figure 6c,d show the battery voltage experiment and estimation results and the corresponding absolute errors by the different methods. Similar to the SOC estimation results, the estimated battery voltage using the UKF, SRUKF, and developed ISRUKF can effectively capture the experiment results. However, the estimated battery voltage based on the developed ISRUKF shows the lowest voltage errors within 0.01 V, as shown in Figure 6d. Moreover, under the same conditions of achieving 270,000 sampling points in the calculation step of 0.01 s, the calculation time of the SOC using the UKF, the SRUKF, and the developed method is 7.5 s, 7.6 s, and 7.7 s, respectively. Compared to the UKF and the SRUKF, the developed method spends almost an equal amount of time to estimate the SOC, but it can achieve the highest SOC estimation accuracy within 1.5% error, and the SOC errors of the UKF and the SRUKF are 6.7% and 5.5%, respectively, as shown in Figure 6b and Figure 7b.
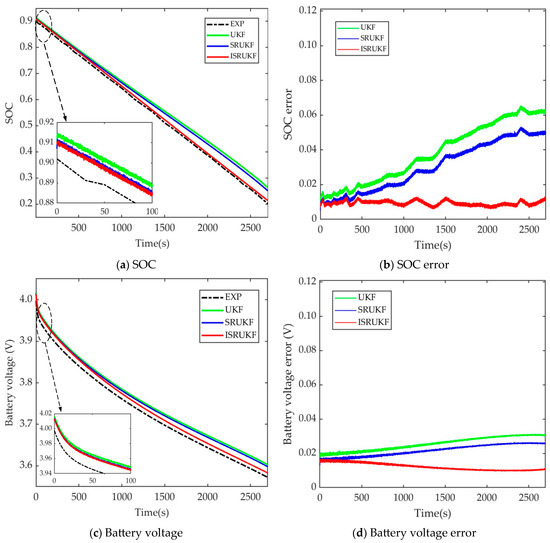
Figure 7.
SOC estimation results using three different algorithms when the is set as 0.01.
Figure 7 illustrates the SOC estimation results using the UKF, SRUKF, and developed ISRUKF when the is set as 0.01. Figure 7a,b present the SOC experiment and estimation results and the corresponding absolute errors by the different methods. Figure 7c,d show the battery voltage estimation results and the corresponding absolute errors using the three methods.
The estimation accuracy of the SOC and battery voltage using the developed ISRUKF is the highest compared to the UKF and the SRUKF. For example, the SOC errors are constantly controlled below 0.01, as shown in Figure 7b, and the batteries’ voltage errors are kept within 0.015 V, which is about 0.5% of the batteries’ nominal voltage, as shown in Figure 7d.
Moreover, with the help of the QR decomposition method (which can overcome the problem of the pseudo-positive definiteness of the covariance matrix), the errors of the estimated SOC and battery voltage estimation using the developed ISRUKF are stable or not divergent. However, the errors of the estimated SOC and battery voltage estimation using the UKF and the SRUKF gradually increase and even diverge in the discharging process shown in Figure 6b,d and Figure 7b,d. It is further proven that the developed ISRUKF based on a dual-coefficient tracker can accurately estimate the SOC for lithium-ion batteries and effectively avoid SOC divergence.
4.3. Comparison of SOC Estimation Results Using Different ISRUKFs, the ISRUKF with Standard STF and the Developed ISRUKF
In this section, a comparison of SOC estimation accuracy using different ISRUKFs (including the developed ISRUKF and the ISRUKF with the standard STF) is carried out to further validate the effectiveness of the developed ISRUKF. Figure 8 shows the SOC estimation accuracy using different ISRUKFs when the is set as 0.005. Figure 8a compares the estimated SOC using the developed ISRUKF (in red) versus the ISRUKF with the standard STF (in green). It is shown that the SOC based on the ISRUKF with the standard STF can consistently follow the experimental results at the beginning of the discharging process, but this SOC deviates further and further from the experiment results as the discharging process moves forward. Figure 8b shows the corresponding SOC absolute error using the different ISRUKFs. Due to the dual-coefficient tracker reducing state noise accumulative calculation errors, the SOC absolute error using the developed ISRUKF (in red) is always lower than the SOC absolute error using the ISRUKF with the standard STF.
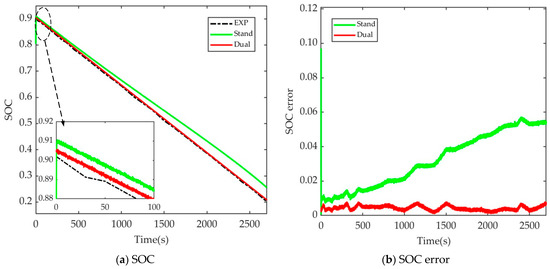
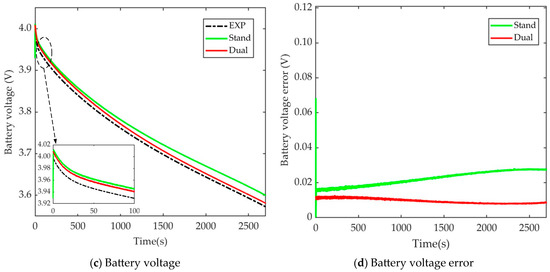
Figure 8.
SOC estimation accuracy using different ISRUKFs when the is set as 0.005.
Without the ability of adjusting the state noise tracking coefficient , the ISRUKF with the standard STF cannot reduce the state noise error accumulation in the iteration process of the UKF, which leads to the SOC absolute error based on this ISRUKF increasing continuously. For example, the SOC absolute error using the developed ISRUKF is constantly kept within 0.01, but the SOC absolute error using the ISRUKF with the standard STF gradually increases from 0.01 to 0.05. Figure 8c,d describe the battery voltage estimation results and the corresponding absolute errors using the different ISRUKFs. It is found that the battery voltage profile based on the developed method can track the experimental results accurately in the whole discharging process with a lower absolute error compared to using the ISRUKF with the standard STF. Therefore, compared to the ISRUKF with the standard STF, the developed method can achieve higher SOC and voltage estimation accuracy.
4.4. SOC Estimation by the Developed ISRUKF with Different Covariance
To verify the effectiveness and adaptation of the developed ISRUKF, a comparison of SOC estimation accuracy is performed when the is different. The is randomly set to 0.001, 0.005, and 0.01, respectively. Figure 9 shows SOC estimation results using the developed ISRUKF with different . Figure 9a,b illustrate the SOC estimation accuracy and its corresponding absolute error by the developed method with various noise statistics. It is noted that the estimated SOC using the developed method can exactly capture the experimental results, and the corresponding SOC absolute errors are stable and small despite the various noise statistics. As shown in Figure 9b, when the noise statistics are set to 0.001, 0.005, and 0.01, respectively, the highest SOC absolute error is controlled below 0.015, and the lowest SOC absolute error is controlled below 0.005 (means 0.5%).
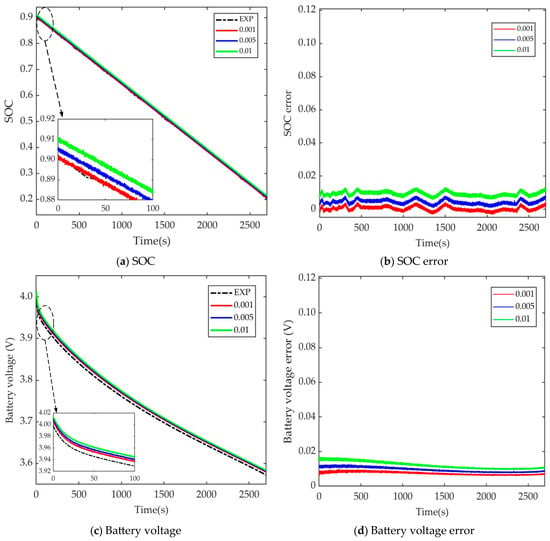
Figure 9.
SOC estimation by the developed ISRUKF with different .
Figure 9c,d show the battery voltage estimation and the corresponding absolute error using the developed ISRUKF with different noise statistics. With the help of the dual-coefficient tracker, the developed method can reduce state noise accumulative calculation errors; in turn, this contributes to gradually reducing the battery voltage deviation from the experimental results and improving its estimation accuracy. Therefore, the developed ISRUKF can not only precisely estimate the SOC of lithium-ion batteries but also shows good robustness when varies.
4.5. Discussions
As a nonlinear system of the battery system, it is difficult to estimate the SOC accurately due to the influence of batteries’ incorrect noise statistics, such as the battery model error and the round-off error of the filter. To verify the SOC estimation precision using the developed method based on the ISRUKF with a dual-coefficient tracker, three test schedules are carried out. With the help of the dual-coefficient tracker, which can track and correct the batteries’ model noise error accumulation, the SOC estimation errors using the developed ISRUKF show the highest precision (below 1.5%) compared with the UKF (6.7%) and the SRUKF (5.5%) when the is 0.005 and 0.01, respectively. Moreover, because the ISRUKF based on the QR decomposition method can overcome the problem of the pseudo-positive definiteness of the batteries’ model covariance, the estimated SOC errors and battery voltage errors using the developed method are kept within a stable range. However, the estimated SOC errors based on the UKF and the SRUKF gradually increase and even diverge.
However, due to not considering the residual sequence of the measurement noise in the dual-coefficient tracker, the SOC estimation accuracy using the developed method based on the dual-coefficient tracker is degraded. In addition, because of the addition of the tracking coefficient calculation, it takes more time for the developed method to accurately estimate the SOC of batteries compared to the UKF and the SRUKF. Some measures should be taken to optimize the iteration process to reduce the calculation time of the developed method.
5. Conclusions
Precise SOC estimation can contribute to protecting and extending the life of lithium-ion batteries. However, the SOC estimation accuracy estimated by the UKF and SRUKF is degraded when the noise statistics arise. Therefore, an SOC estimation method based on a dual-coefficient tracking improved square-root unscented Kalman filter (ISRUKF) was developed in this paper for lithium-ion batteries. Compared to the SRUKF and the UKF, the developed ISRUKF shows the highest SOC estimation accuracy with an SOC error below 1.5% when the is 0.005 and 0.01, but the SOC error using the UKF and the SRUKF is 6.7% and 5.5%, respectively. At the same time, with the help of its dual-coefficient tracker, which can reduce state noise accumulative calculation errors, the SOC absolute error using the developed ISRUKF is always lower than the SOC absolute error using the ISRUKF with the standard STF when the is constant (set as 0.005). For example, the SOC error using the ISRUKF with the standard STF gradually increases from 0.01 to 0.05, and its maximum error is about 5%, while the developed ISRUKF can keep the SOC error under 1.1%. Moreover, the developed ISRUKF can not only precisely estimate the SOC of lithium-ion batteries with the lowest SOC absolute error of 0.5% but also shows good robustness when the state noise statistics are set to 0.001, 0.005, and 0.01, respectively.
Future work includes the investigation of optimizing the dual-coefficient tracker. The SOC estimation accuracy of lithium-ion batteries is reduced using the developed method because of ignoring the measurement noise and corresponding noise covariance of the batteries, such as the measurement errors of the terminal voltage and current of the batteries. The optimization of the batteries’ measurement noise in the developed method will be performed in future works. Additionally, further research will also be carried out to explore reducing the calculation time of the developed ISRUKF. It is important for online SOC estimation to reduce the calculation time of the ISRUKF and other algorithms.
Author Contributions
Methodology and writing, S.P.; Original draft preparation and data curation, A.Z.; Project administration and data curation, D.L.; Validation and data curation, M.C.; Software and methodology, J.K.; Content organization and delivery, M.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Jiangsu University “Qinglan Project” (2021-11) grant number: xjr2021052.
Acknowledgments
We are grateful to the Jiangsu University “Qinglan Project” (2021-11) and school-level research projects of the Yancheng Institute of Technology (xjr2021052) for supporting this research. The authors also thank the more than 150 companies and organizations that support research activities at the Center for Advanced Life Cycle Engineering (CALCE) at the University of Maryland and the Centre for Advanced Innovations in Reliability and Safety (CAIRS).
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
Nomenclature
| SOC | state of charge (-) |
| KF | Kalman filter (-) |
| EKF | extended Kalman filter (-) |
| UKF | unscented Kalman filter (-) |
| SRUKF | square-root unscented Kalman filter (-) |
| AUKF | adaptive unscented Kalman filter (-) |
| STF | strong tracking filter (-) |
| OCV | open-circuit voltage (V) |
| ECM | equivalent circuit model (-) |
| UOC | open-circuit voltage of the batteries (V) |
| R0 | internal resistance of the batteries (Ω) |
| RL | concentration resistance of the batteries (Ω) |
| CL | concentration capacitance of the batteries (F) |
| RS | electrochemical resistance (Ω) |
| CS | electrochemical capacitance (F) |
| It | current of the batteries (A) |
| Ut | terminal voltage of the batteries (V) |
| a0~a5 | coefficient of the equation (-) |
| b0~b5 | coefficient of the equation (-) |
| c0~c2 | coefficient of the equation (-) |
| d0~d2 | coefficient of the equation (-) |
| e0~e2 | coefficient of the equation (-) |
| f0~f2 | coefficient of the equation (-) |
| SOC0 | initial value of SOC (-) |
| coulomb efficiency (-) | |
| QN | nominal capacity of the batteries (Wh) |
| US | electrochemical voltage of the batteries (V) |
| UL | concentration voltage of the batteries (V) |
| sampling time (s) | |
| time parameter (s) | |
| time parameter (s) | |
| wk | state noise (-) |
| vk | measurement noise (-) |
| xk | system state vector (-) |
| yk | system measurement vector (-) |
| uk | system input vector (V) |
| f(·) | nonlinear state model (-) |
| g(·) | nonlinear measurement model (-) |
| r | mean of the measurement noise (-) |
| q | mean of the state noise (-) |
| R | covariance value of measurement noise (-) |
| Q | covariance value of state noise (-) |
| x0 | initial mean (-) |
| S0 | initial state covariance square root (-) |
| E(·) | expectation mean value (-) |
| (·)T | matrix transpose operation (-) |
| n | dimension of the state vector (-) |
| scaling parameter (-) | |
| h | column factor (-) |
| wm | variance weight factor (-) |
| wc | mean weight factor (-) |
| error magnitude of the higher-order term (-) | |
| updated state calculation value (-) | |
| () | QR decomposition (-) |
| Sk|k−1 | state covariance square-root matrix (-) |
| () | Cholesky decomposition (-) |
| Pxy | mutual covariance (-) |
| updated calculation measurement | |
| Sz | measurement covariance square-root matrix (-) |
| Sk|k | state covariance square-root optimal estimation matrix (-) |
| Pk|k−1 | state covariance matrix (-) |
| qk | upper triangular matrix (-) |
| rk | orthogonal matrix (-) |
| e | identity matrix of order n (-) |
| Hk | coefficient matrix of the measurement function (-) |
| fading factor (-) | |
| trace() | trace of the corresponding matrix (-) |
| Ck | covariance of the residual sequence of outputs (-) |
| forgetting factor (-) | |
| output residual sequence | |
| corrected state covariance square-root matrix (-) | |
| state noise tracking coefficient (-) |
References
- Renxin, X.; Yanwen, H.; Wei, Z.; Zhaohui, C. A novel approach to estimate the state of charge for lithium-ion battery under different temperatures incorporating open circuit voltage online identification. J. Energy Storage 2023, 67, 107509. [Google Scholar] [CrossRef]
- Meng, J.; Yue, M.; Diallo, D. Nonlinear extension of battery constrained predictive charging control with transmission of Jacobian matrix. Int. J. Electr. Power Energy Syst. 2023, 146, 108762. [Google Scholar] [CrossRef]
- Qiao, J.; Wang, S.; Yu, C.; Yang, X.; Fernandez, C. A chaotic firefly-Particle filtering method of dynamic migration modeling for the state-of-charge and state-of-health co-estimation of a lithium-ion battery performance. Energy 2023, 263, 126164. [Google Scholar] [CrossRef]
- Yu, Q.; Liu, Y.; Long, S.; Jin, X.; Li, J.; Shen, W. A Branch Current Estimation and Correction Method for a Parallel Connected Battery System Based on Dual BP Neural Networks. Green Energy Intell. Transp. 2022, 1, 100029. [Google Scholar] [CrossRef]
- Peng, S.; Zhu, L.; Dou, Z.; Liu, D.; Yang, R.; Pecht, M. Method of Site Selection and Capacity Setting for Battery Energy Storage System in Distribution Networks with Renewable Energy Sources. Energies 2023, 16, 3899. [Google Scholar] [CrossRef]
- Chen, C.; Xiong, R.; Yang, R.; Li, H. A novel data-driven method for mining battery open-circuit voltage characterization. J. Green Energy Intell. Transp. 2022, 1, 100001. [Google Scholar] [CrossRef]
- Chen, B.; Jiang, H.; Chen, X.; Li, H. Robust state-of-charge estimation for lithium-ion batteries based on an improved gas-liquid dynamics model. Energy 2022, 238, 122008. [Google Scholar] [CrossRef]
- Xia, L.; Wang, S.; Yu, C.; Fan, Y.; Li, B.; Xie, Y. Joint estimation of the state-of-energy and state-of-charge of lithium-ion batteries under a wide temperature range based on the fusion modeling and online parameter prediction. J. Energy Storage 2022, 52, 105010. [Google Scholar] [CrossRef]
- Wassiliadis, N.; Kriegler, J.; Gamra, K.A.; Lienkamp, M. Model-based health-aware fast charging to mitigate the risk of lithium plating and prolong the cycle life of lithium-ion batteries in electric vehicles. J. Power Sources 2023, 561, 232586. [Google Scholar] [CrossRef]
- Liu, Z.; Zhao, Z.; Qiu, Y.; Jing, B.; Yang, C. State of charge estimation for Li-ion batteries based on iterative Kalman filter with adaptive maximum correntropy criterion. J. Power Sources 2023, 580, 233282. [Google Scholar] [CrossRef]
- Zhao, X.; Jung, S.; Wang, B.; Xuan, D. State of charge estimation of lithium-ion battery based on improved adaptive boosting algorithm. J. Energy Storage 2023, 71, 108047. [Google Scholar] [CrossRef]
- Li, X.; Wang, Z.; Zhang, L. Co-estimation of capacity and state-of-charge for lithium-ion batteries in electric vehicles. Energy 2019, 174, 33–44. [Google Scholar] [CrossRef]
- Yu, Q.; Huang, Y.; Tang, A.; Wang, C.; Shen, W. OCV-SOC-Temperature Relationship Construction and State of Charge Estimation for a Series–Parallel Lithium-Ion Battery Pack. IEEE Trans. Intell. Transp. Syst. 2023, 24, 6362–6371. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, X.; Yun, X.; Fan, X. A novel hybrid machine learning coulomb counting technique for state of charge estimation of lithium-ion batteries. J. Energy Storage 2023, 63, 107081. [Google Scholar] [CrossRef]
- Li, K.; Gao, X.; Liu, C.; Chang, C.; Li, X. A novel Co-estimation framework of state-of-charge, state-of-power and capacity for lithium-ion batteries using multi-parameters fusion method. Energy 2023, 269, 126820. [Google Scholar] [CrossRef]
- Zhu, R.; Duan, B.; Zhang, J.; Zhang, Q.; Zhang, C. Co-estimation of model parameters and state-of-charge for lithium-ion batteries with recursive restricted total least squares and unscented Kalman filter. Appl. Energy 2020, 277, 115494. [Google Scholar] [CrossRef]
- Xia, B.; Cui, D.; Sun, Z.; Lao, Z.; Zhang, R.; Wang, W.; Sun, W.; Lai, Y.; Wang, M. State of charge estimation of lithium-ion batteries using optimized Levenberg-Marquardt wavelet neural network. Energy 2018, 153, 694–705. [Google Scholar] [CrossRef]
- Song, Q.; Wang, S.; Xu, W.; Shao, Y.; Fernandez, C. A novel joint support vector machine-cubature Kalman filtering method for adaptive state of charge prediction of lithium-ion batteries. Int. J. Electrochem. Sci. 2021, 16, 210823. [Google Scholar] [CrossRef]
- Tagade, P.; Hariharan, K.S.; Gambhire, P.; Kolake, S.M.; Song, T.; Oh, D.; Yeo, T.; Doo, S. Recursive Bayesian filtering framework for lithium-ion cell state estimation. J. Power Sources 2016, 306, 274–288. [Google Scholar] [CrossRef]
- Zhu, W.; Guo, B.; Li, Y.; Yang, Y.; Xie, C.; Jin, J.; Gooi, H.B. Uncertainty quantification of proton-exchange-membrane fuel cells degradation prediction based on Bayesian-Gated Recurrent Unit. eTransportation 2023, 16, 100230. [Google Scholar] [CrossRef]
- Jiang, B.; Dai, H.; Wei, X.; Xu, T. Joint estimation of lithium-ion battery state of charge and capacity within an adaptive variable multi-timescale framework considering current measurement offset. Appl. Energy 2019, 253, 113619. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for batteries management systems of LiPB-based HEV batteries packs: Part 2. Modeling and identification. J. Power Sources 2004, 134, 262–276. [Google Scholar] [CrossRef]
- Chai, H.; Gao, Z.; Jiao, Z.; Yang, C. State of charge estimation for lithium-ion batteries based on an adaptive fractional-order cubature Kalman filter with initial value compensation. J. Energy Storage 2023, 68, 107544. [Google Scholar] [CrossRef]
- Yang, F.; Xing, Y.; Wang, D.; Tsui, K.L. A comparative study of three model-based algorithms for estimating state-of-charge of lithium-ion batteries under a new combined dynamic loading profile. Appl. Energy 2016, 164, 387–399. [Google Scholar] [CrossRef]
- Liu, S.; Deng, D.; Wang, S.; Luo, W.; Takyi-Aninakwa, P.; Qiao, J.; Li, S.; Jin, S.; Hu, C. Dynamic adaptive square-root unscented Kalman filter and rectangular window recursive least square method for the accurate state of charge estimation of lithium-ion batteries. J. Energy Storage 2023, 67, 107603. [Google Scholar] [CrossRef]
- Aung, H.; Low, K.S. Temperature dependent state-of-charge estimation of lithium ion battery using dual spherical unscented Kalman filter. IET Power Electron. 2015, 8, 2026–2033. [Google Scholar] [CrossRef]
- Menegaz, H.M.T.; Ishihara, J.Y. Unscented and square-root unscented Kalman filters for quaternionic systems. Int. J. Robust Nonlinear Control 2018, 28, 4500–4527. [Google Scholar] [CrossRef]
- Wei, W.; Gao, S.; Zhong, Y.; Gu, C.; Hu, G. Adaptive square-root unscented particle filtering algorithm for dynamic navigation. Sensors 2018, 18, 2337. [Google Scholar] [CrossRef]
- Asl, R.M.; Hagh, Y.S.; Simani, S.; Handroos, H. Adaptive square-root unscented Kalman filter: An experimental study of hydraulic actuator state estimation. Mech. Syst. Signal Process. 2019, 132, 670–691. [Google Scholar]
- Zhu, Q.; Xu, M.; Liu, W.; Zheng, M. A state of charge estimation method for lithium-ion batteries based on fractional order adaptive extended kalman filter. Energy 2019, 187, 115880. [Google Scholar] [CrossRef]
- Duan, L.; Zhang, X.; Jiang, Z.; Gong, Q.; Wang, Y.; Ao, X. State of charge estimation of lithium-ion batteries based on second-order adaptive extended Kalman filter with correspondence analysis. Energy 2023, 280, 128159. [Google Scholar] [CrossRef]
- Peng, S.; Chen, C.; Shi, H.; Yao, Z. State of charge estimation of battery energy storage systems based on adaptive unscented Kalman filter with a noise statistics estimator. IEEE Access 2017, 5, 13202–13212. [Google Scholar] [CrossRef]
- Xu, X.; Tang, S.; Ren, H.; Han, X.; Wu, Y.; Lu, L.; Feng, X.; Yu, C.; Xie, J.; Ouyang, M.; et al. Joint state estimation of lithium-ion batteries combining improved equivalent circuit model with electrochemical mechanism and diffusion process. J. Energy Storage 2022, 56, 106135. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).