


A Method for Abnormal Battery Charging Capacity Diagnosis Based on Electric Vehicles Operation Data


Abstract
:1. Introduction
2. Data Acquisition and Pre-Processing
2.1. Data Acquisition
2.2. Data Pre-Processing
3. Diagnostic Method for Abnormal Charging Capacity
3.1. Feature Extraction during Charging State
- (1)
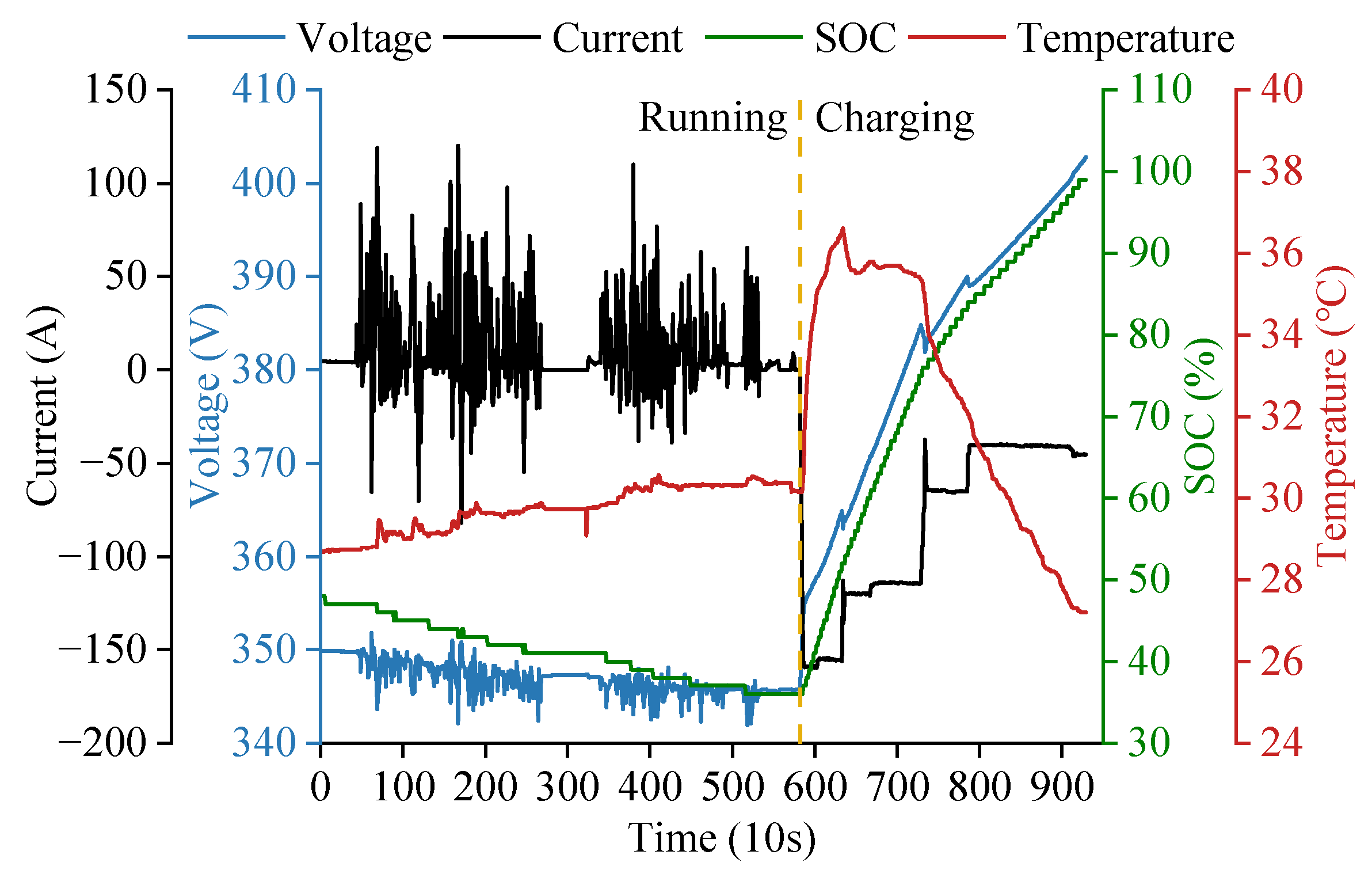
- The charging current is an indicator of the DCI according to Equation (7). Consequently, the mean and variance of the charging current were chosen as indicators that, respectively, represent the level and stability of the charging current.
- (2)
- Temperature has a significant impact on battery capacity. For instance, the available capacity of a battery decreases significantly at low temperatures [33]. The average temperature of the battery was determined using a temperature probe within the battery pack.
- (3)
- Considering the impact of the BMS on the real-time SOC correction, the charging capacity varies across the SOC intervals. The start and end SOC in the charging status were selected.
- (4)
- During an EV operation, the actual capacity of the battery degrades nonlinearly, and the accumulated mileage is an effective indicator of the degree of degradation.
3.2. Gaussian Process Regression
3.3. Enhanced Gaussian Process Regression
3.4. Abnormal Charging Capacity Diagnosis
4. Results and Discussion
4.1. Data Restoring Results
4.2. Abnormal Charging Capacity Diagnosis Results
4.3. Model Validation
4.4. Model Comparison
5. Conclusions
- (1)
- The XGBoost framework for data restoration eliminates the limitation that traditional interpolation can only fill a single line. A tuning parameter strategy that reduces the generalisation error of cross-validation improves the performance of the model. The MAE of this framework in recovering critical data of the battery, such as the current and voltage, reached 10.440 A and 0.573 V, respectively.
- (2)
- The abnormal charging capacity fault is identified by the absolute error between the GPR outputs and the true DCI, and the thresholds are determined using the Box–Cox with 3. The method finds vehicles with an abnormal charging capacity two months in advance, and the fault frequencies of the abnormal and normal vehicles are 0.5221 and 0.0311, respectively. In addition, the test vehicle frequently exhibits an abnormal charging capacity at high SOC levels; therefore, to prevent overcharging, it is necessary for manufacturers to focus on the charging strategy for controlling high SOC levels.
- (3)
- In reality, the model proposed in this study can establish a unified diagnosis and monitoring model for a specific brand of power batteries, and it exhibits good potential for application. The results indicate that the failure thresholds determined by Box–Cox with 3 produce fewer false alarms than those determined by confidence intervals. In addition, the tuning parameter workload of the proposed method is acceptable and can be simply and reliably integrated into a big data platform.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xia, X.; Li, P. A review of the life cycle assessment of electric vehicles: Considering the influence of batteries. Sci. Total Environ. 2022, 814, 152870. [Google Scholar] [CrossRef]
- Chen, S.; Gao, Z.; Sun, T. Safety challenges and safety measures of Li-ion batteries. Energy Sci. Eng. 2021, 9, 1647–1672. [Google Scholar] [CrossRef]
- Hannan, M.A.; Lipu, M.H.; Hussain, A.; Mohamed, A. A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854. [Google Scholar] [CrossRef]
- Xiong, R.; Sun, W.; Yu, Q.; Sun, F. Research progress, challenges and prospects of fault diagnosis on battery system of electric vehicles. Appl. Energy 2020, 279, 115855. [Google Scholar] [CrossRef]
- Hong, J.; Wang, Z.; Qu, C.; Zhou, Y.; Shan, T.; Zhang, J.; Hou, Y. Investigation on overcharge-caused thermal runaway of lithium-ion batteries in real-world electric vehicles. Appl. Energy 2022, 321, 119229. [Google Scholar] [CrossRef]
- Miao, Y.; Hynan, P.; Von Jouanne, A.; Yokochi, A. Current Li-ion battery technologies in electric vehicles and opportunities for advancements. Energies 2019, 12, 1074. [Google Scholar] [CrossRef]
- Dai, H.; Jiang, B.; Hu, X.; Lin, X.; Wei, X.; Pecht, M. Advanced battery management strategies for a sustainable energy future: Multilayer design concepts and research trends. Renew. Sustain. Energy Rev. 2021, 138, 110480. [Google Scholar] [CrossRef]
- Wang, Z.; Zeng, S.; Guo, J.; Qin, T. State of health estimation of lithium-ion batteries based on the constant voltage charging curve. Energy 2019, 167, 661–669. [Google Scholar] [CrossRef]
- Li, X.; Yuan, C.; Li, X.; Wang, Z. State of health estimation for Li-Ion battery using incremental capacity analysis and Gaussian process regression. Energy 2020, 190, 116467. [Google Scholar] [CrossRef]
- Pang, X.; Liu, X.; Jia, J.; Wen, J.; Shi, Y.; Zeng, J.; Zhao, Z. A lithium-ion battery remaining useful life prediction method based on the incremental capacity analysis and Gaussian process regression. Microelectron. Reliab. 2021, 127, 114405. [Google Scholar] [CrossRef]
- She, C.; Zhang, L.; Wang, Z.; Sun, F.; Liu, P.; Song, C. Battery state of health estimation based on incremental capacity analysis method: Synthesizing from cell-level test to real-world application. IEEE J. Emerg. Sel. Top. Power Electron. 2021. [Google Scholar] [CrossRef]
- Song, L.; Zhang, K.; Liang, T.; Han, X.; Zhang, Y. Intelligent state of health estimation for lithium-ion battery pack based on big data analysis. J. Energy Storage 2020, 32, 101836. [Google Scholar] [CrossRef]
- Jiang, L.; Diao, X.; Zhang, Y.; Zhang, J.; Li, T. Review of the Charging Safety and Charging Safety Protection of Electric Vehicles. World Electr. Veh. J. 2021, 12, 184. [Google Scholar] [CrossRef]
- Kurzweil, P.; Frenzel, B.; Scheuerpflug, W. A Novel Evaluation Criterion for the Rapid Estimation of the Overcharge and Deep Discharge of Lithium-Ion Batteries Using Differential Capacity. Batteries 2022, 8, 86. [Google Scholar] [CrossRef]
- Zhang, C.; Fang, W.; Zhao, B.; Xie, Z.; Hu, C.; Wen, H.; Zhong, T. Study on Fault Diagnosis Method and Application of Automobile Power Supply Based on Fault Tree-Bayesian Network. Secur. Commun. Netw. 2022, 2022, 4046966. [Google Scholar] [CrossRef]
- Wang, L.-y.; Wang, L.-f.; Liu, W.; Zhang, Y.-w. Research on Fault Diagnosis System of Electric Vehicle Power Battery Based on OBD Technology. In Proceedings of the 2017 International Conference on Circuits, Devices and Systems (ICCDS), Chengdu, China, 5–8 September 2017; pp. 95–99. [Google Scholar]
- Tian, J.; Wang, Y.; Chen, Z. Sensor fault diagnosis for lithium-ion battery packs based on thermal and electrical models. Int. J. Electr. Power Energy Syst. 2020, 121, 106087. [Google Scholar] [CrossRef]
- Feng, X.; Pan, Y.; He, X.; Wang, L.; Ouyang, M. Detecting the internal short circuit in large-format lithium-ion battery using model-based fault-diagnosis algorithm. J. Energy Storage 2018, 18, 26–39. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, P.; Wang, Z.; Zhang, L.; Hong, J. Fault and defect diagnosis of battery for electric vehicles based on big data analysis methods. Appl. Energy 2017, 207, 354–362. [Google Scholar] [CrossRef]
- Wang, C.; Yu, C.; Guo, W.; Wang, Z.; Tan, J. Identification of Typical Sub-Health State of Traction Battery Based on a Data-Driven Approach. Batteries 2022, 8, 65. [Google Scholar] [CrossRef]
- Hong, J.; Wang, Z.; Ma, F.; Yang, J.; Xu, X.; Qu, C.; Zhang, J.; Shan, T.; Hou, Y.; Zhou, Y. Thermal runaway prognosis of battery systems using the modified multiscale entropy in real-world electric vehicles. IEEE Trans. Transp. Electrif. 2021, 7, 2269–2278. [Google Scholar] [CrossRef]
- Shang, Y.; Lu, G.; Kang, Y.; Zhou, Z.; Duan, B.; Zhang, C. A multi-fault diagnosis method based on modified Sample Entropy for lithium-ion battery strings. J. Power Sources 2020, 446, 227275. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, Z.; Chen, Y.; Liu, P.; Wang, S.; Zhang, Z.; Dorrell, D.G. Modified Relative Entropy-Based Lithium-Ion Battery Pack Online Short-Circuit Detection for Electric Vehicle. IEEE Trans. Transp. Electrif. 2021, 8, 1710–1723. [Google Scholar] [CrossRef]
- Wang, Z.; Hong, J.; Liu, P.; Zhang, L. Voltage fault diagnosis and prognosis of battery systems based on entropy and Z-score for electric vehicles. Appl. Energy 2017, 196, 289–302. [Google Scholar] [CrossRef]
- Li, D.; Zhang, Z.; Liu, P.; Wang, Z.; Zhang, L. Battery fault diagnosis for electric vehicles based on voltage abnormality by combining the long short-term memory neural network and the equivalent circuit model. IEEE Trans. Power Electron. 2020, 36, 1303–1315. [Google Scholar] [CrossRef]
- Klink, J.; Hebenbrock, A.; Grabow, J.; Orazov, N.; Nylén, U.; Benger, R.; Beck, H.-P. Comparison of Model-Based and Sensor-Based Detection of Thermal Runaway in Li-Ion Battery Modules for Automotive Application. Batteries 2022, 8, 34. [Google Scholar] [CrossRef]
- Zheng, Y.; Luo, Q.; Cui, Y.; Dai, H.; Han, X.; Feng, X. Fault identification and quantitative diagnosis method for series-connected lithium-ion battery packs based on capacity estimation. IEEE Trans. Ind. Electron. 2021, 69, 3059–3067. [Google Scholar] [CrossRef]
- Wang, Z.; Song, C.; Zhang, L.; Zhao, Y.; Liu, P.; Dorrell, D.G. A data-driven method for battery charging capacity abnormality diagnosis in electric vehicle applications. IEEE Trans. Transp. Electrif. 2021, 8, 990–999. [Google Scholar] [CrossRef]
- Bi, J.; Wang, Y.; Sai, Q.; Ding, C. Estimating remaining driving range of battery electric vehicles based on real-world data: A case study of Beijing, China. Energy 2019, 169, 833–843. [Google Scholar] [CrossRef]
- Li, F.; Min, Y.; Zhang, Y. A Novel Method for Lithium-Ion Battery Fault Diagnosis of Electric Vehicle Based on Real-Time Voltage. Wirel. Commun. Mob. Comput. 2022, 2022, 7277446. [Google Scholar] [CrossRef]
- Nan, J.; Deng, B.; Cao, W.; Hu, J.; Chang, Y.; Cai, Y.; Zhong, Z. Big Data-Based Early Fault Warning of Batteries Combining Short-Text Mining and Grey Correlation. Energies 2022, 15, 5333. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, P.; Zhang, X.; Lin, N. Research on Safety of New Energy Vehicles based on Big Data. In Proceedings of the 2022 IEEE International Conference on Artificial Intelligence and Computer Applications (ICAICA), Dalian, China, 24–26 June 2022; pp. 507–510. [Google Scholar]
- Chen, T.; Guestrin, C. Xgboost: A scalable tree boosting system. In Proceedings of the 22nd Acm Sigkdd International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Gan, N.; Sun, Z.; Zhang, Z.; Xu, S.; Liu, P.; Qin, Z. Data-driven fault diagnosis of lithium-ion battery overdischarge in electric vehicles. IEEE Trans. Power Electron. 2021, 37, 4575–4588. [Google Scholar] [CrossRef]
- Schulz, E.; Speekenbrink, M.; Krause, A. A tutorial on Gaussian process regression: Modelling, exploring, and exploiting functions. J. Math. Psychol. 2018, 85, 1–16. [Google Scholar] [CrossRef]
- Jin, S.-S. Compositional kernel learning using tree-based genetic programming for Gaussian process regression. Struct. Multidiscip. Optim. 2020, 62, 1313–1351. [Google Scholar] [CrossRef]
- Kazemzadeh, E.; Fuinhas, J.A.; Koengkan, M. The impact of income inequality and economic complexity on ecological footprint: An analysis covering a long-time span. J. Environ. Econ. Policy 2022, 11, 133–153. [Google Scholar] [CrossRef]
- Quinonero-Candela, J. Learning with Uncertainty: Gaussian Processes and Relevance Vector Machines; Technical University of Denmark: Lyngby, Denmark, 2004. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Restoration Methods | XGBoost (Current/A) | Previous Value (Current/A) | XGBoost (Voltage/V) | Previous Value (Voltage/V) |
|---|---|---|---|---|
| MAE | 10.440 | 13.998 | 0.573 | 0.547 |
| RMSE | 23.313 | 31.534 | 2.430 | 2.690 |
| Test Vehicle Number | V1 | V2 |
|---|---|---|
| p | 0.0311 | 0.5221 |
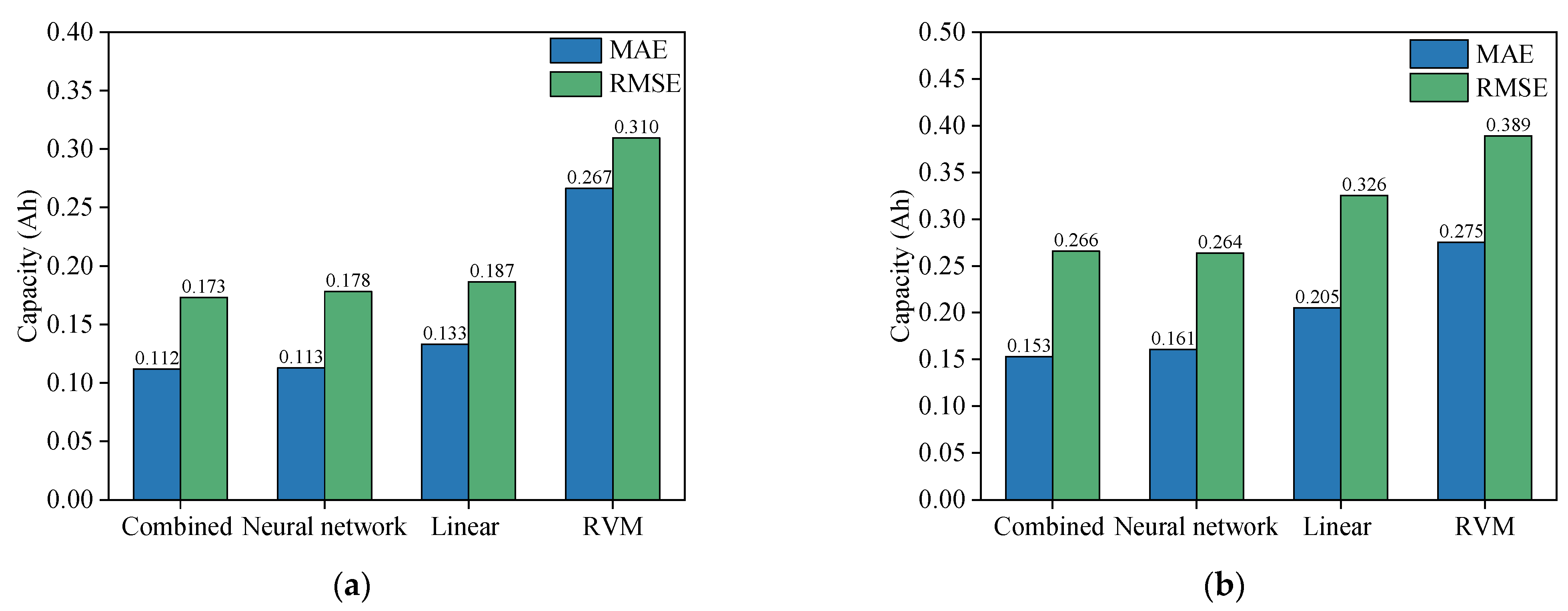
| Strategies for Establishing GPR | V1 (Proposed GPR) | V1 (GPR for Each EV) | V2 (Proposed GPR) | V2 (GPR for Each EV) |
|---|---|---|---|---|
| MAE | 0.1119 | 0.1349 | 0.1531 | 0.1900 |
| RMSE | 0.1731 | 0.2007 | 0.2661 | 0.3520 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Min, Y.; Zhang, Y.; Wang, C. A Method for Abnormal Battery Charging Capacity Diagnosis Based on Electric Vehicles Operation Data. Batteries 2023, 9, 103. https://doi.org/10.3390/batteries9020103
Li F, Min Y, Zhang Y, Wang C. A Method for Abnormal Battery Charging Capacity Diagnosis Based on Electric Vehicles Operation Data. Batteries. 2023; 9(2):103. https://doi.org/10.3390/batteries9020103
Chicago/Turabian StyleLi, Fang, Yongjun Min, Ying Zhang, and Chen Wang. 2023. "A Method for Abnormal Battery Charging Capacity Diagnosis Based on Electric Vehicles Operation Data" Batteries 9, no. 2: 103. https://doi.org/10.3390/batteries9020103
APA StyleLi, F., Min, Y., Zhang, Y., & Wang, C. (2023). A Method for Abnormal Battery Charging Capacity Diagnosis Based on Electric Vehicles Operation Data. Batteries, 9(2), 103. https://doi.org/10.3390/batteries9020103