
Simultaneous Trunk and Canopy Shaking Improves Table Olive Harvester Efficiency versus Trunk Shaking Alone

 , ,
, ,  , and
, and
Abstract
1. Introduction
2. Materials and Methods
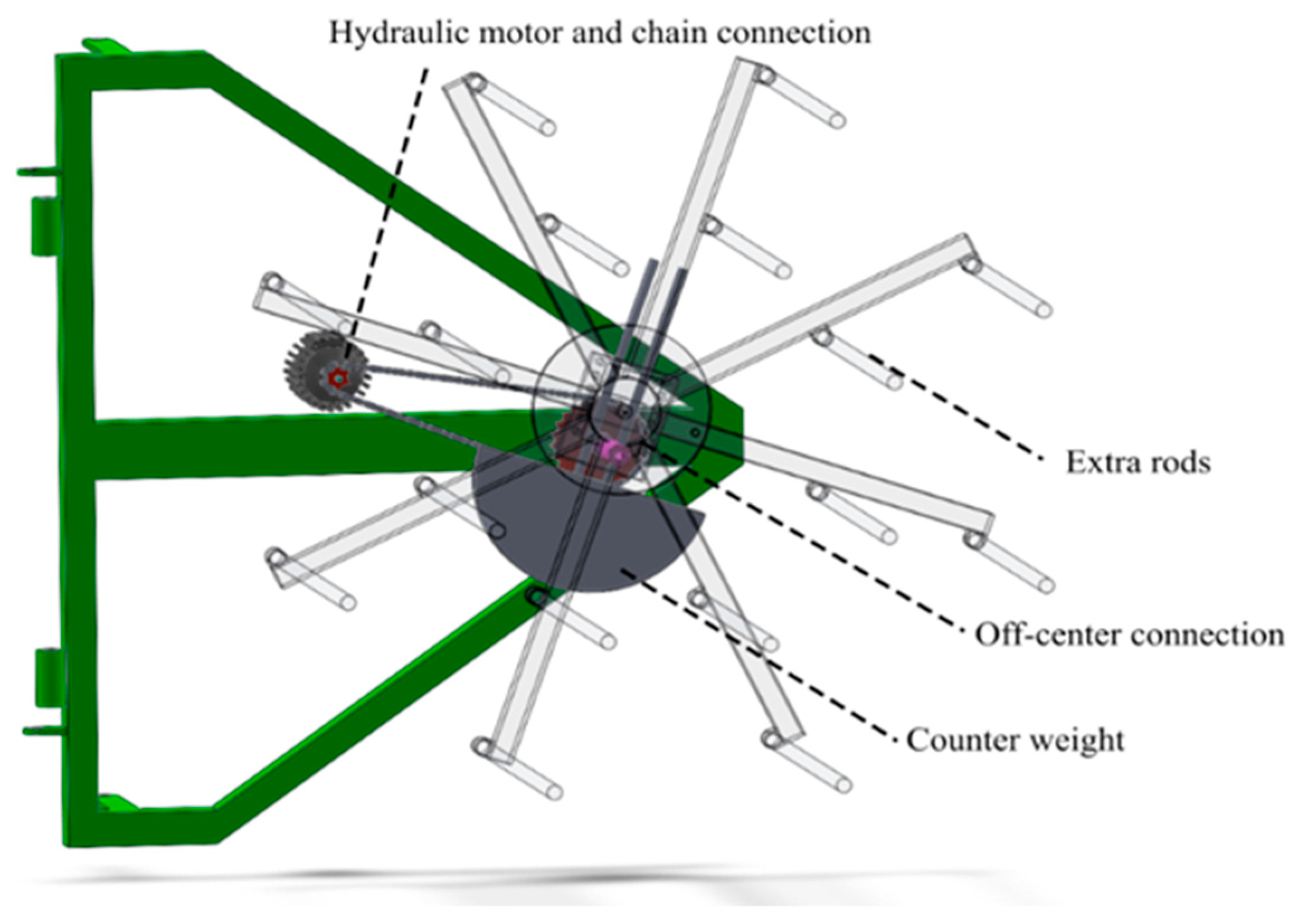
2.1. Design Procedures
- It could compress the tree canopy.
- It could adjust to tree size and height.
- It could harvest fruit within the tree row.
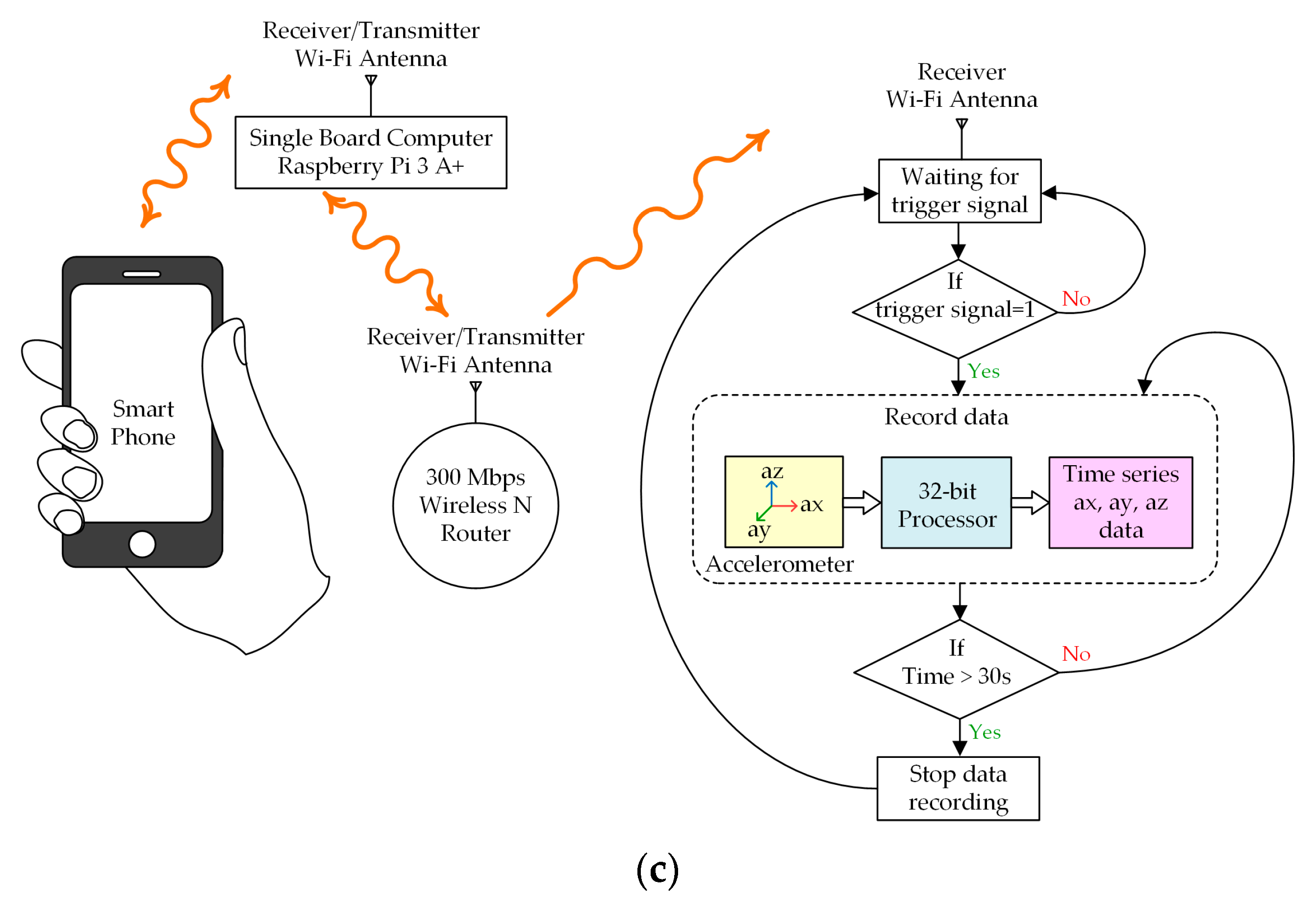
2.2. Acceleration Sensor and Wireless Data Logging
2.3. Experimental Tests
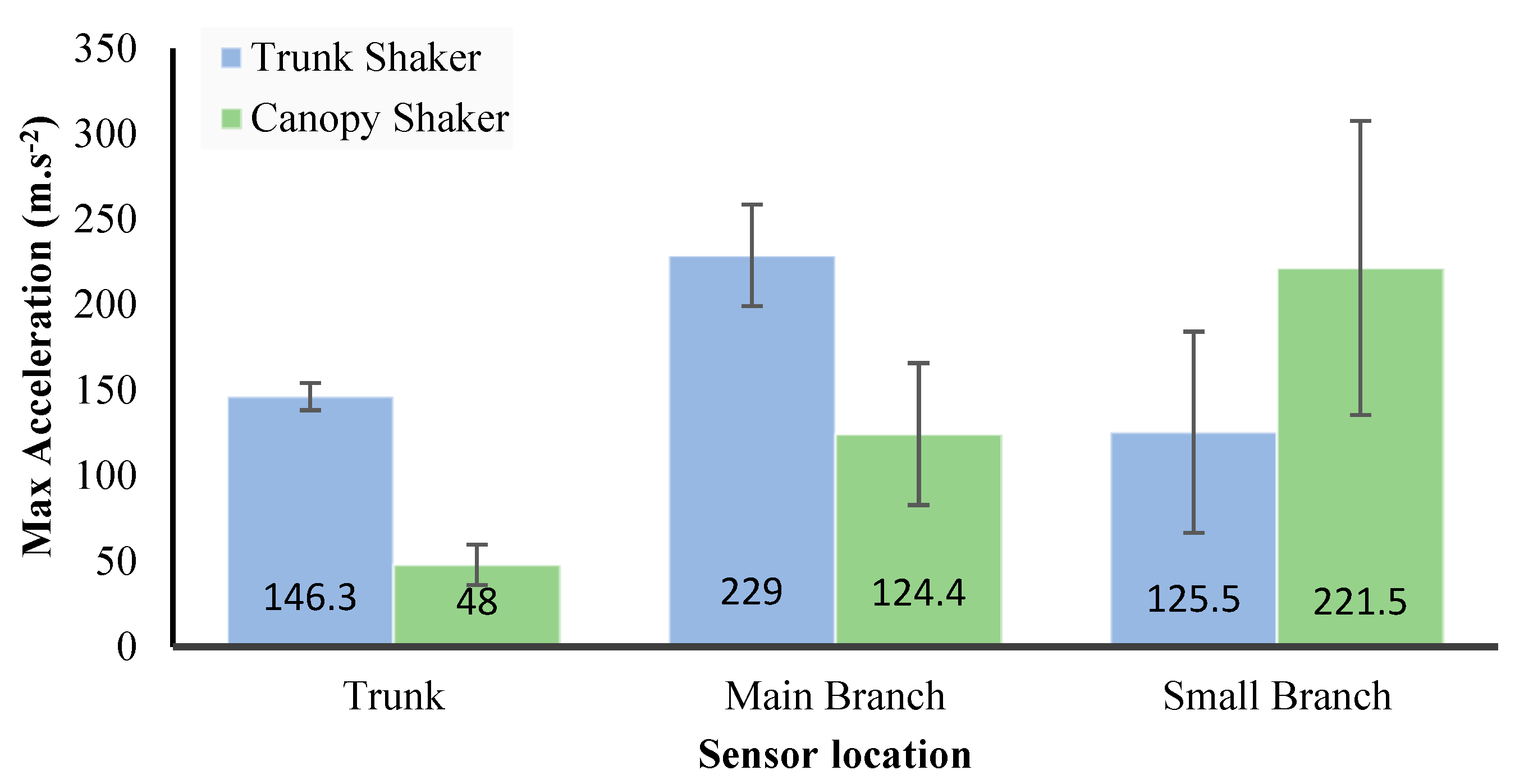
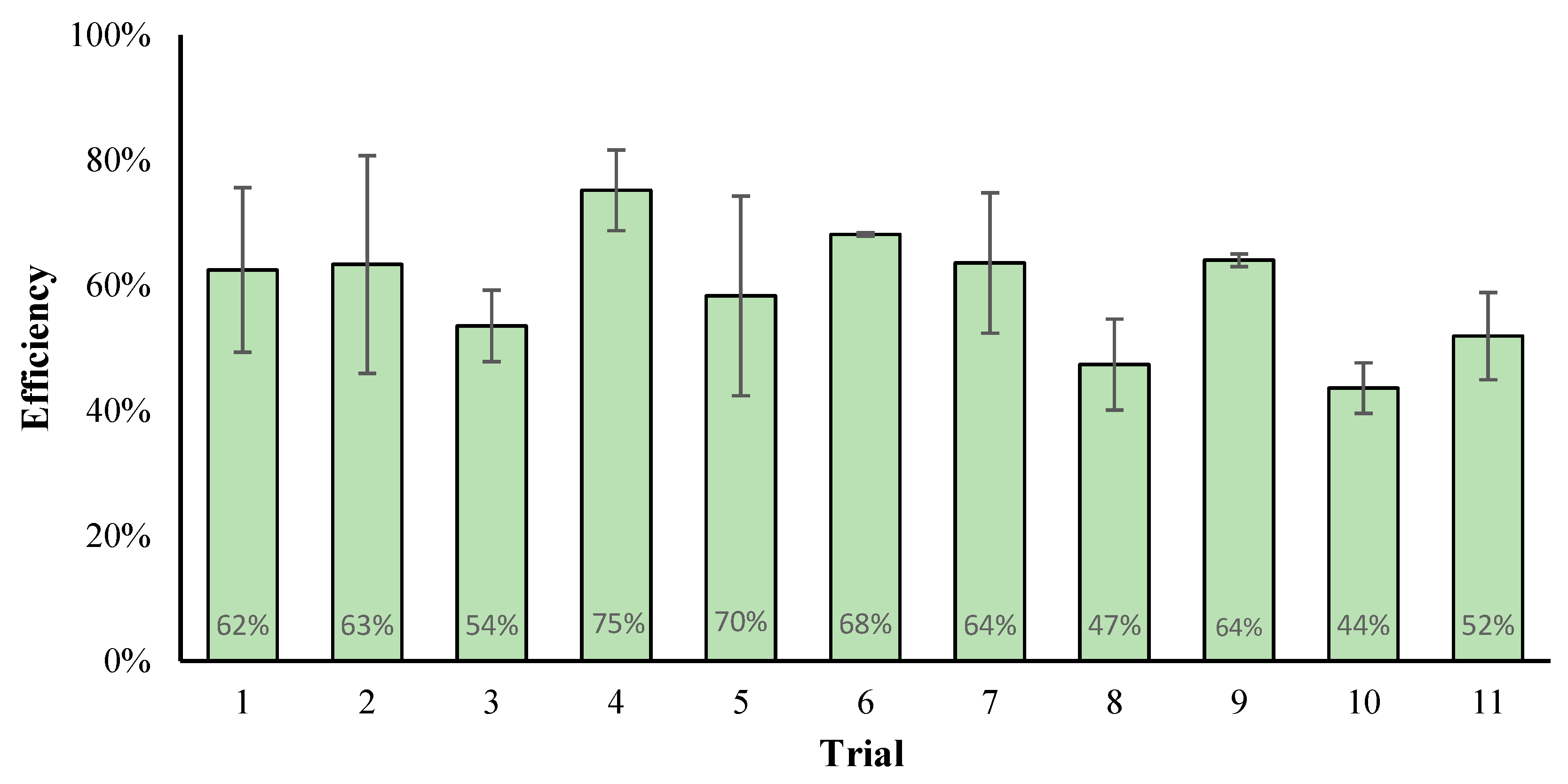
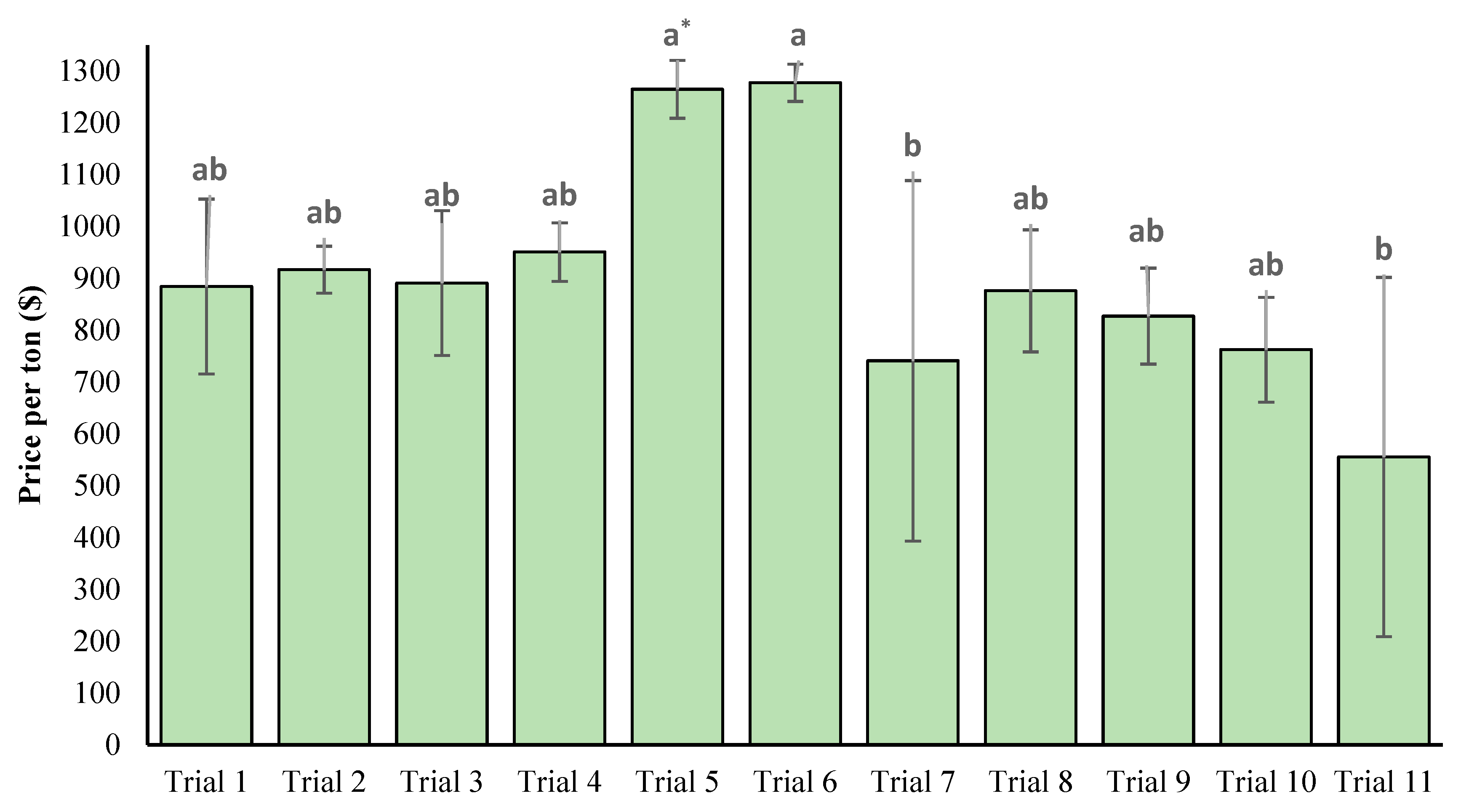
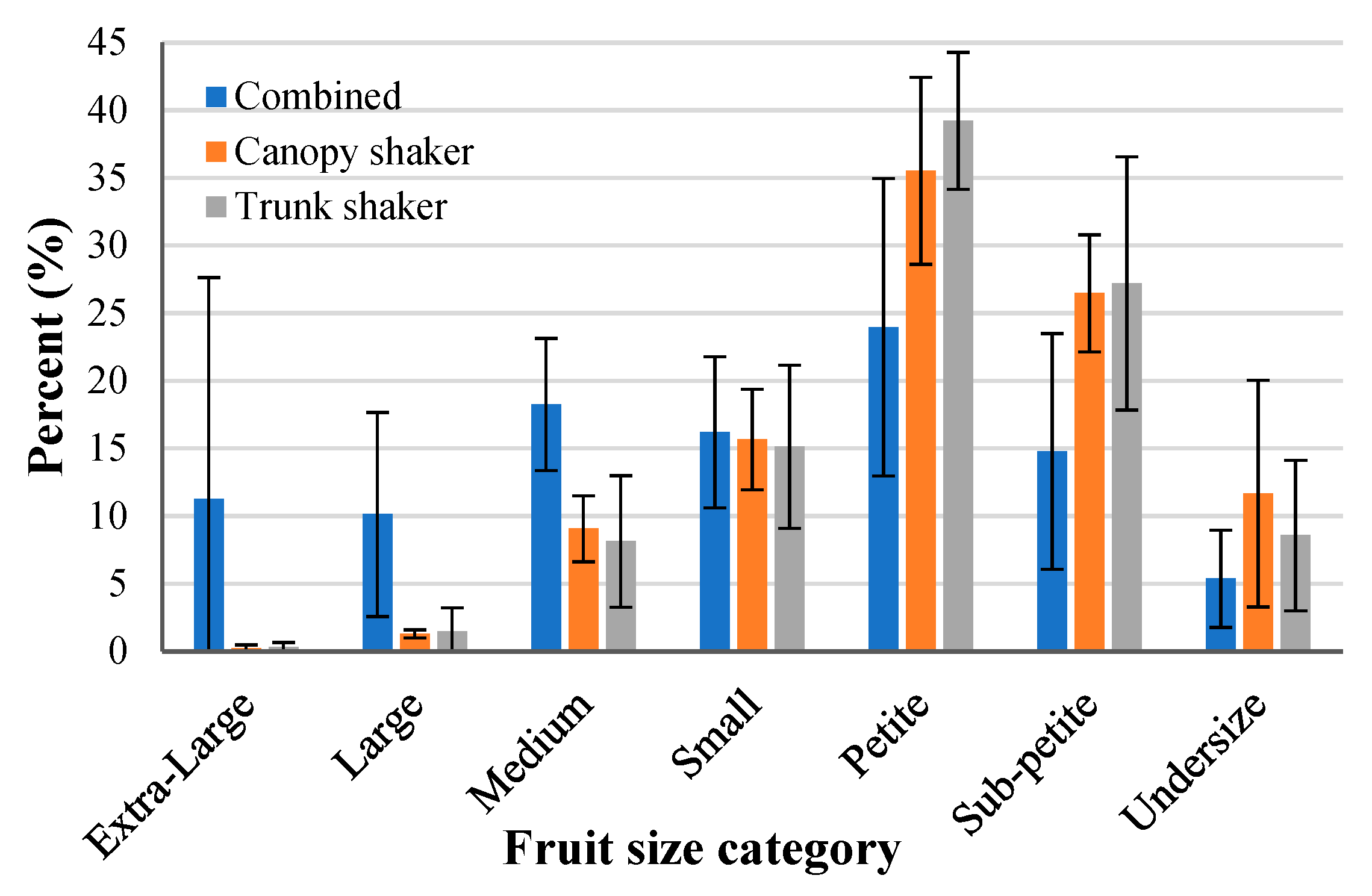
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- California Department of Food and Agriculture. California Agricultural Statistics Review. 2021. Available online: https://www.cdfa.ca.gov/Statistics/PDFs/2021_Ag_Stats_Review.pdf (accessed on 27 March 2023).
- Macías-Macías, M.; Sánchez-Santamaria, H.; García Orellana, C.J.; González-Velasco, H.M.; Gallardo-Caballero, R.; García-Manso, A. Mask R-CNN for quality control of table olives. Multimed. Tools Appl. 2023, 82, 1–15. [Google Scholar] [CrossRef]
- Emmanouilidou, M.G.; Koukourikou-Petridou, M.; Gerasopoulos, D.; Kyriacou, M.C. Evolution of physicochemical constitution and cultivar-differential maturity configuration in olive (Olea europaea L.) fruit. Sci. Hortic. 2020, 272, 109516. [Google Scholar] [CrossRef]
- Cicek, G. Determination of harvesting costs and cost analysis for different olive harvesting methods. J. Food Agric. Environ. 2011, 9, 201–204. [Google Scholar]
- Homayouni, T.; Gholami, A.; Toudeshki, A.; Afsah-Hejri, L.; Ehsani, R. Estimation of proper shaking parameters for pistachio trees based on their trunk size. Biosyst. Eng. 2022, 216, 121–131. [Google Scholar] [CrossRef]
- Defterli, S.G.; Shi, Y.; Xu, Y.; Ehsani, R. Review of robotic technology for strawberry production. Appl. Eng. Agric. 2016, 32, 301–318. [Google Scholar]
- Gholami, A.; Homayouni, T.; Ehsani, R.; Sun, J.-Q. Inverse Kinematic Control of a Delta Robot Using Neural Networks in Real-Time. Robotics 2021, 10, 115. [Google Scholar] [CrossRef]
- Bayano-Tejero, S.; Martínez-Gila, D.; Blanco-Roldán, G.; Sola-Guirado, R.R. Cleaning system, batch sorting and traceability between field-industry in the mechanical harvesting of table olives. Postharvest. Biol. Technol. 2023, 199, 112278. [Google Scholar] [CrossRef]
- Ursol, L.M.; Conchione, C.; Peroni, D.; Carretta, A.; Moret, S. A study on the impact of harvesting operations on the mineral oil contamination of olive oils. Food Chem. 2023, 406, 135032. [Google Scholar] [CrossRef]
- Horvath, E.; Sitkei, G. Damping properties of plum trees shaken at their trunks. Trans. ASAE 2005, 48, 19–25. [Google Scholar] [CrossRef]
- Ma, R.; Homayouni, T.; Toudeshki, A.; Ehsani, R.; Zhang, X. An Experimental Study and Mathematical Modeling of Vibration Transfer in Pistachio Trees Using an Inertia-Type Trunk Shaker and Field-Adapted Wireless Sensors. Shock Vib. 2022, 2022, 99666848. [Google Scholar] [CrossRef]
- Sanchez-Cachinero, P.; Luque-Mohedano, R.; Sola-Guirado, R.R. Computational Model for the Dynamic Characterisation of a Trunk Shaker. Agriculture 2022, 12, 2158. [Google Scholar] [CrossRef]
- Afsah-Hejri, L.; Homayouni, T.; Toudeshki, A.; Ehsani, R.; Ferguson, L.; Castro-García, S. Mechanical harvesting of selected temperate and tropical fruit and nut trees. Hortic. Rev. 2022, 49, 171–242. [Google Scholar]
- Affeldt Jr, H.A.; Brown, G.K.; Gerrish, J.B. A new shaker for fruit and nut trees. J. Agric. Eng. Res. 1989, 44, 53–66. [Google Scholar] [CrossRef]
- Ravetti, L.; Ravetti, L. Guide to Efficient Olive Harvesting; Rural Industries Research and Development Corporation: Kingston, Australia, 2008. [Google Scholar]
- Castro-Garcia, S.; Castillo-Ruiz, F.J.; Jimenez-Jimenez, F.; Gil-Ribes, J.A.; Blanco-Roldan, G.L. Suitability of Spanish ‘Manzanilla’table olive orchards for trunk shaker harvesting. Biosyst. Eng. 2015, 129, 388–395. [Google Scholar] [CrossRef]
- O’Brien, M.; Fridley, R.B. Measurement of vibrations related to harvesting and handling of fruits and vegetables. Trans. ASAE 1970, 13, 870–873. [Google Scholar]
- Fridley, R.B.; Claypool, L.L.; Mehlschau, J.J. A new approach to tree fruit collection. Trans. ASAE 1975, 18, 859–863. [Google Scholar] [CrossRef]
- Liu, T.H.; Ehsani, R.; Toudeshki, A.; Abbas, M.; Zou, X.J. Shaking functionality evaluation of four different types of citrus canopy-shaker tines. Appl. Eng. Agric. 2018, 34, 809–817. [Google Scholar] [CrossRef]
- Sarkar, P. Use of shaking mechanism and robotic arm in fruit harvesting: A comprehensive review. J. Crop Weed 2021, 17, 1–9. [Google Scholar] [CrossRef]
- Sola-Guirado, R.R.; Ceular-Ortiz, D.; Gil-Ribes, J.A. Automated system for real-time tree canopy contact with canopy shakers. Comput. Electron. Agric. 2017, 143, 139–148. [Google Scholar] [CrossRef]
- Ferguson, L.; Castro-García, S.; Burns, J.K.; Glozer, K. Mechanical harvesting of California table and oil olives. Adv. Hortic. Sci. 2010, 24, 53–63. [Google Scholar]
- Pu, Y.; Toudeshki, A.; Ehsani, R.; Yang, F. Design and evaluation of a two-section canopy shaker with variable frequency for mechanical harvesting of citrus. Int. J. Agric. Biol. Eng. 2018, 11, 77–87. [Google Scholar] [CrossRef]
- Sessiz, A.; Özcan, M. Olive removal with pneumatic branch shaker and abscission chemical. J. Food Eng. 2006, 76, 148–153. [Google Scholar] [CrossRef]
- Zhang, X.; He, L.; Karkee, M.; Whiting, M.D.; Zhang, Q. Field evaluation of targeted shake-and-catch harvesting technologies for fresh market apple. Trans. ASABE 2020, 63, 1759–1771. [Google Scholar] [CrossRef]
- Zhou, J.; He, L.; Karkee, M.; Zhang, Q. Analysis of shaking-induced cherry fruit motion and damage. Biosyst. Eng. 2016, 144, 105–114. [Google Scholar] [CrossRef]
- Savary, S.K.J.U.; Ehsani, R.; Schueller, J.K.; Rajaraman, B.P. Simulation study of citrus tree canopy motion during harvesting using a canopy shaker. Trans. ASABE 2010, 53, 1373–1381. [Google Scholar] [CrossRef]
- Castro-Garcia, S.; Aragon-Rodriguez, F.; Sola-Guirado, R.R.; Serrano, A.J.; Soria-Olivas, E.; Gil-Ribes, J.A. Vibration monitoring of the mechanical harvesting of citrus to improve fruit detachment efficiency. Sensors 2019, 19, 1760. [Google Scholar] [CrossRef]
- Pu, Y.; Toudeshki, A.; Ehsani, R.; Yang, F.; Abdulridha, J. Selection and experimental evaluation of shaking rods of canopy shaker to reduce tree damage for citrus mechanical harvesting. Int. J. Agric. Biol. Eng. 2018, 11, 48–54. [Google Scholar] [CrossRef]
- Liu, T.; Ehsani, R.; Toudeshki, A.; Zou, X.; Wang, H. Experimental Study of Vibrational Acceleration Spread and Comparison Using Three Citrus Canopy Shaker Shaking Tines. Shock Vib. 2017, 2017, 9827926. [Google Scholar] [CrossRef]
- Burns, J.K.; Ferguson, L.; Glozer, K.; Krueger, W.H.; Rosecrance, R.C. Screening fruit loosening agents for black ripe processed table olives. HortScience 2008, 43, 1449–1453. [Google Scholar] [CrossRef]
- Du, X.; Chen, K.; Ma, Z.; Wu, C.; Zhang, G. Design, construction, and evaluation of a three-dimensional vibratory harvester for tree fruit. Appl. Eng. Agric. 2020, 36, 221–231. [Google Scholar] [CrossRef]
- Torregrosa, A.; Albert, F.; Aleixos, N.; Ortiz, C.; Blasco, J. Analysis of the detachment of citrus fruits by vibration using artificial vision. Biosyst. Eng. 2014, 119, 1–12. [Google Scholar] [CrossRef]
- Castro-Garcia, S.; Rosa, U.A.; Gliever, C.J.; Smith, D.; Burns, J.K.; Krueger, W.H.; Ferguson, L.; Glozer, K. Video evaluation of table olive damage during harvest with a canopy shaker. HortTechnology 2009, 19, 260–266. [Google Scholar] [CrossRef]
- Zipori, I.; Dag, A.; Tugendhaft, Y.; Birger, R. Mechanical harvesting of table olives: Harvest efficiency and fruit quality. HortScience 2014, 49, 55–58. [Google Scholar] [CrossRef]
- Famiani, F.; Farinelli, D.; Rollo, S.; Camposeo, S.; Di Vaio, C.; Inglese, P. Evaluation of different mechanical fruit harvesting systems and oil quality in very large size olive trees. Span. J. Agric. Res. 2014, 12, 960–972. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Canopy Shaker (rpm) | Trunk Shaker Intensity | ||
|---|---|---|---|
| Low | Medium | High | |
| 100 | Trial-1 | Trial-2 | Trial-3 |
| 150 | Trial-4 | Trial-5 | Trial-6 |
| 200 | Trial-7 | Trial-8 | Trial-9 |
| Canopy shaker | Trial-10 | ||
| Trunk shaker | Trial-11 | ||
| Crop | Fruit Removal Efficiency | Shaking Period | Description | Ref. |
|---|---|---|---|---|
| Olive | 50% | --- | No obsession chemical | [24] |
| Citrus | 69.1% | --- | --- | [16] |
| Olive | >80% | 30–60 s | Trunk shaker + 3 to 4 beating crews | [35] |
| Olive | 40–60% | 30–60 s | Trunk shaker + 3 to 4 beating crew | [35] |
| Olive | 87.2–89.9% | 60 S | Trunk shaker + Mechanical comb +2 Beating crews | [36] |
| Olive | 40–72% | 60 S | Trunk shaker | [36] |
| Olive | 54–75% | 15 S | Trunk Shaker + Canopy shaker | This study |
| 52% | Trunk Shaker | |||
| 44% | Canopy shaker |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Homayouni, T.; Maharlooei, M.; Toudeshki, A.; Ferguson, L.; Ehsani, R. Simultaneous Trunk and Canopy Shaking Improves Table Olive Harvester Efficiency versus Trunk Shaking Alone. Horticulturae 2023, 9, 640. https://doi.org/10.3390/horticulturae9060640
Homayouni T, Maharlooei M, Toudeshki A, Ferguson L, Ehsani R. Simultaneous Trunk and Canopy Shaking Improves Table Olive Harvester Efficiency versus Trunk Shaking Alone. Horticulturae. 2023; 9(6):640. https://doi.org/10.3390/horticulturae9060640
Chicago/Turabian StyleHomayouni, Taymaz, Mohammadmehdi Maharlooei, Arash Toudeshki, Louise Ferguson, and Reza Ehsani. 2023. "Simultaneous Trunk and Canopy Shaking Improves Table Olive Harvester Efficiency versus Trunk Shaking Alone" Horticulturae 9, no. 6: 640. https://doi.org/10.3390/horticulturae9060640
APA StyleHomayouni, T., Maharlooei, M., Toudeshki, A., Ferguson, L., & Ehsani, R. (2023). Simultaneous Trunk and Canopy Shaking Improves Table Olive Harvester Efficiency versus Trunk Shaking Alone. Horticulturae, 9(6), 640. https://doi.org/10.3390/horticulturae9060640