
Design of and Experiment with Physical Perception Pineapple Targeted Flower Forcing-Spraying Control System

 ,
,
Abstract
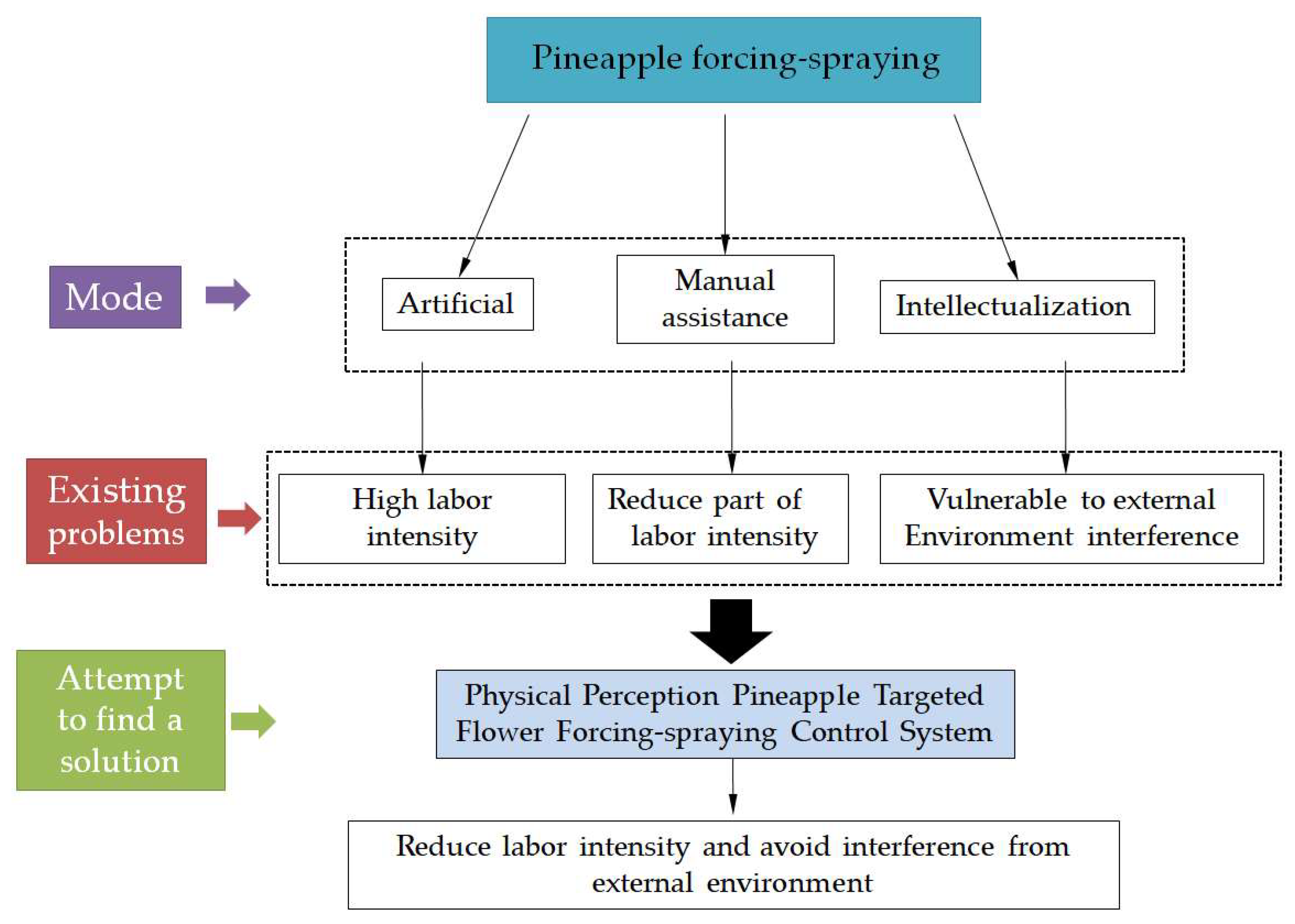
1. Introduction
2. Methodology
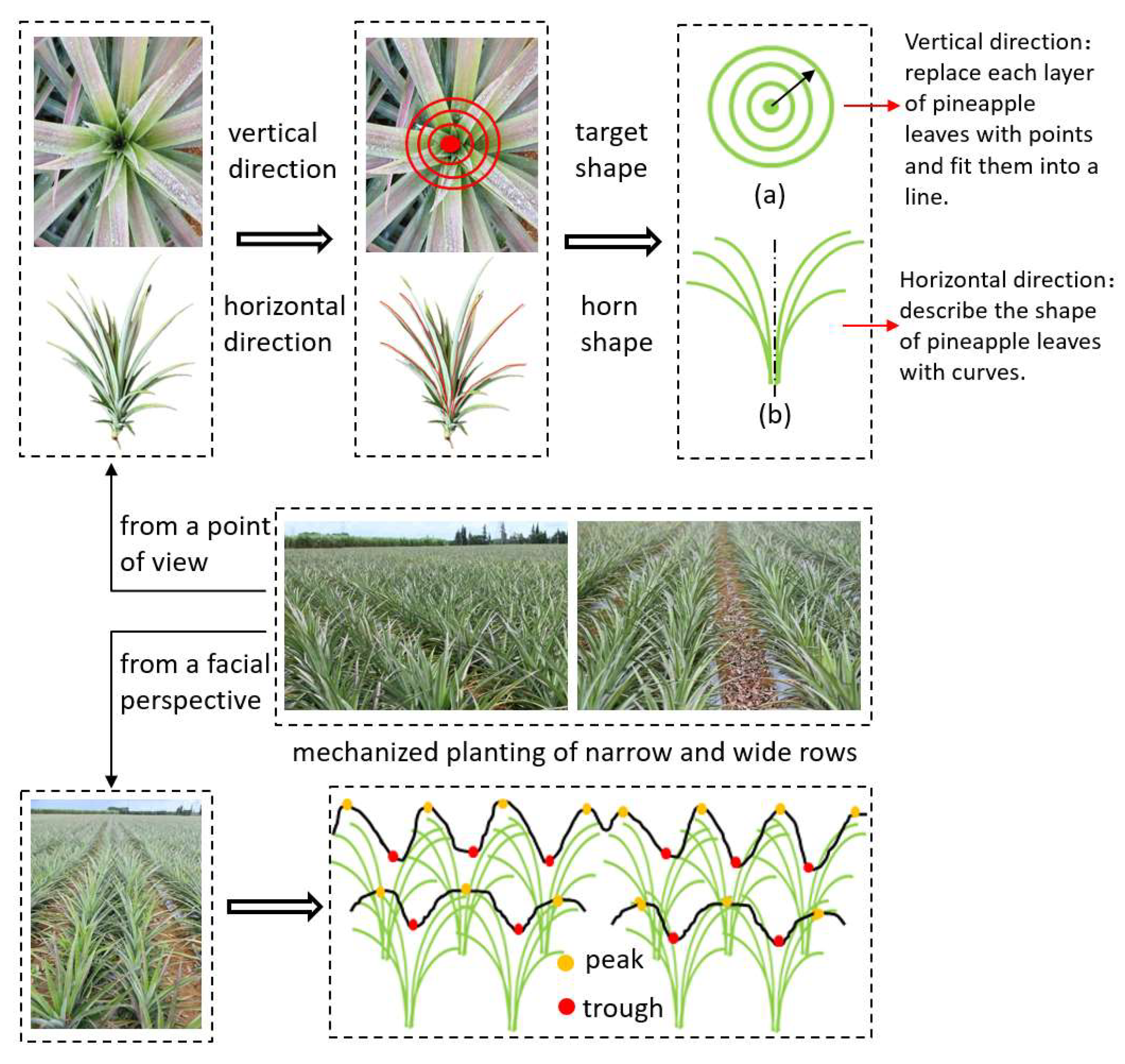
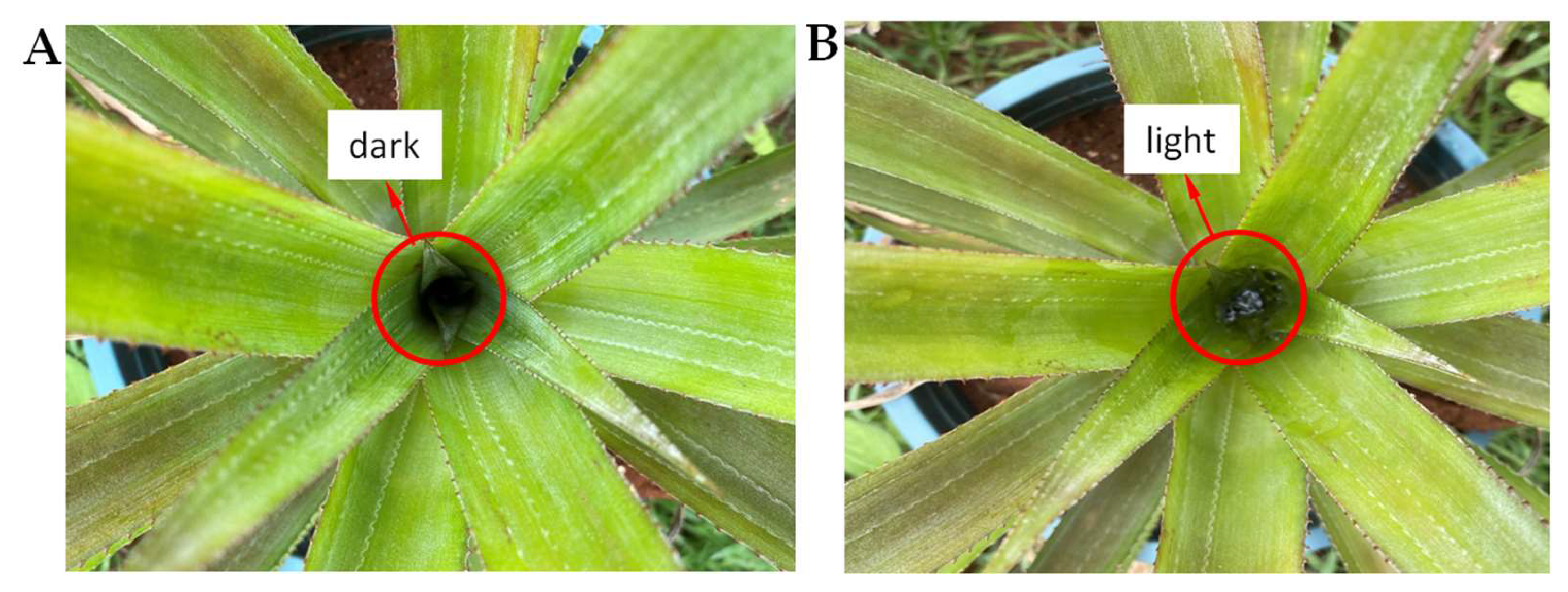
2.1. Analysis of Pineapple Plant Morphology at Flowering Forcing Stage
2.2. Structure and Principle Design of Flower Forcing–Spraying System
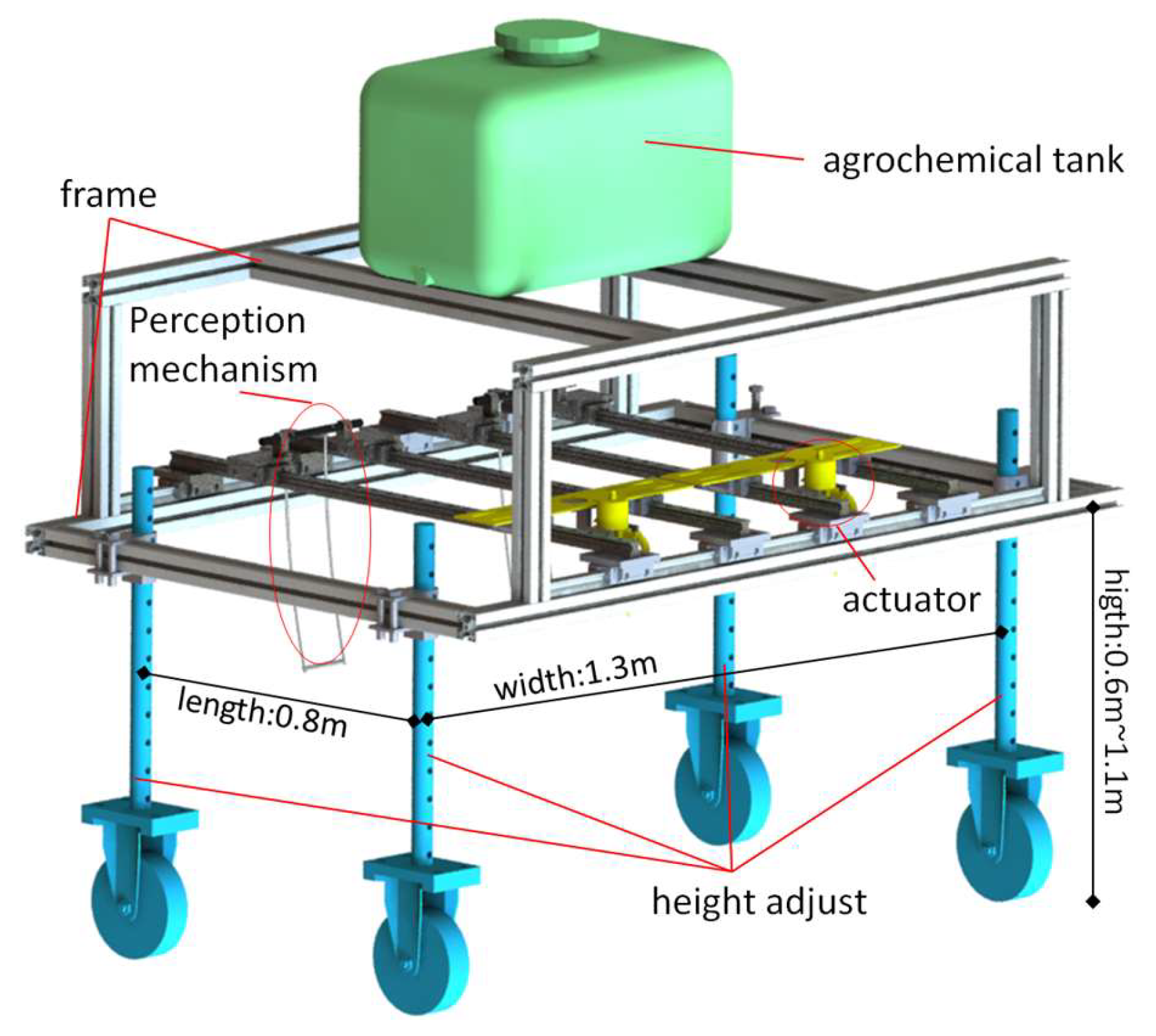
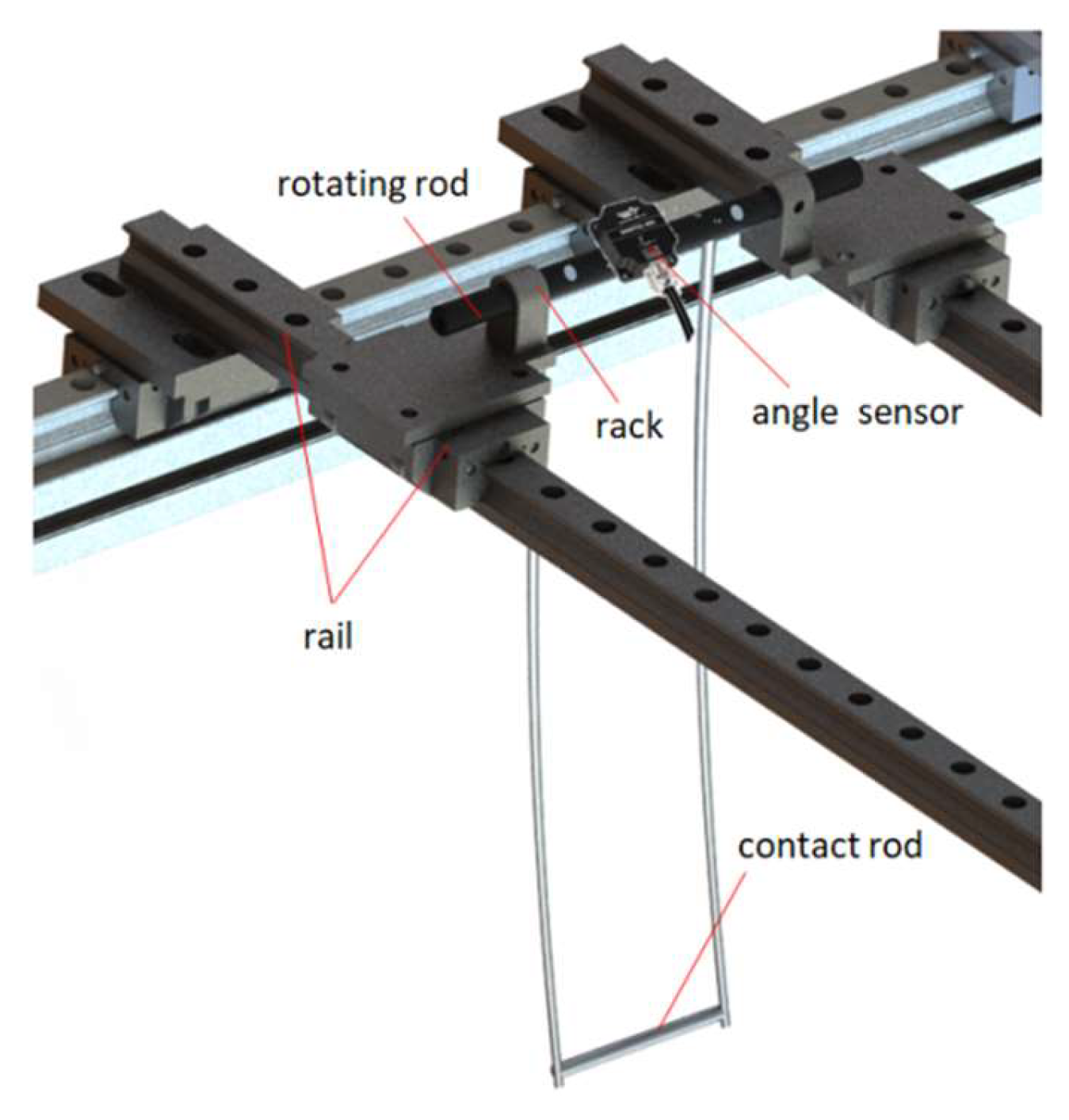
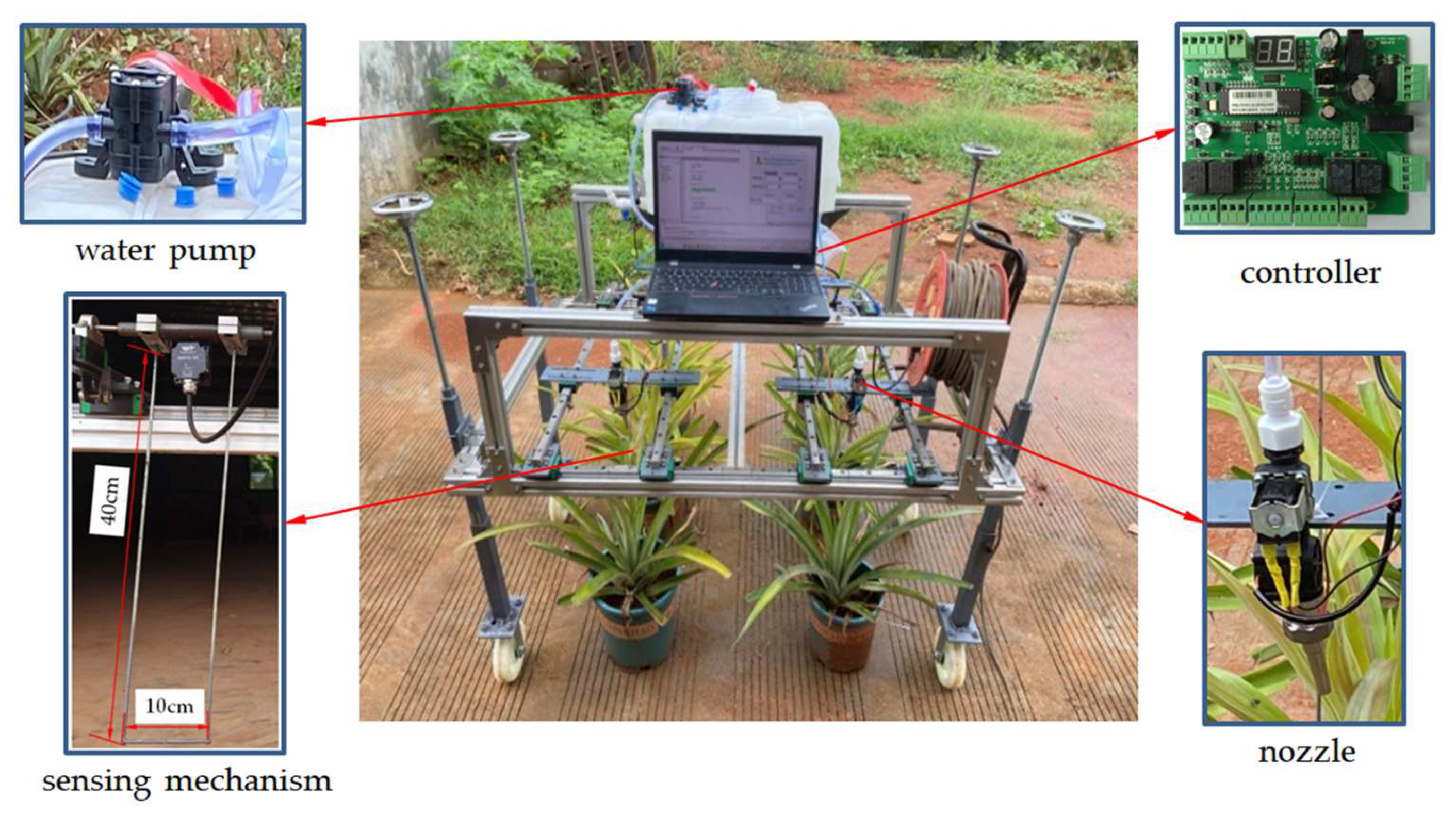
2.2.1. Overall Structure
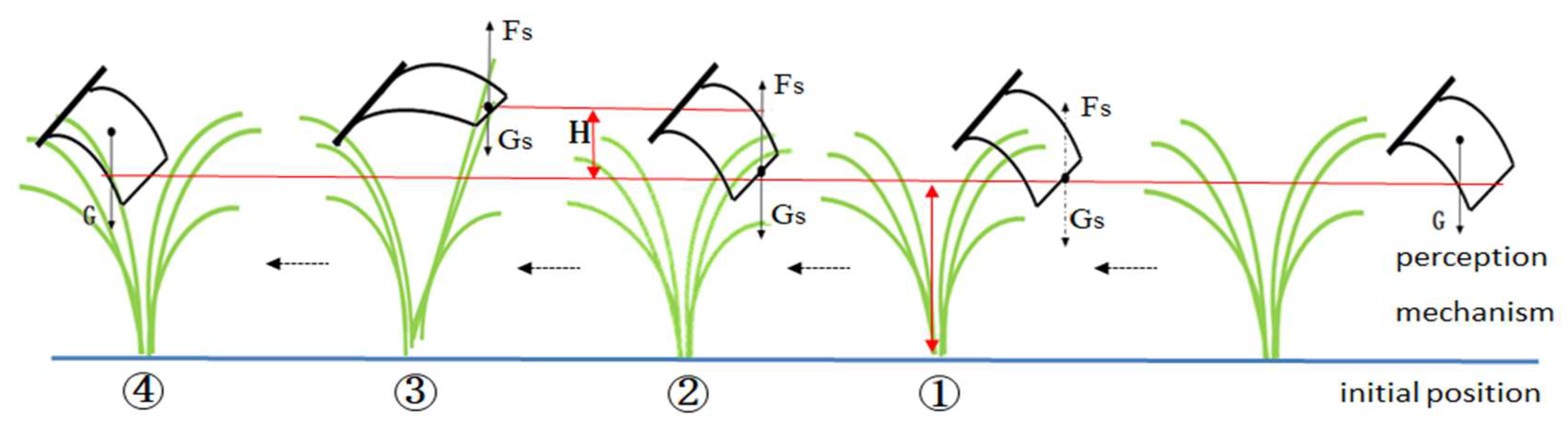
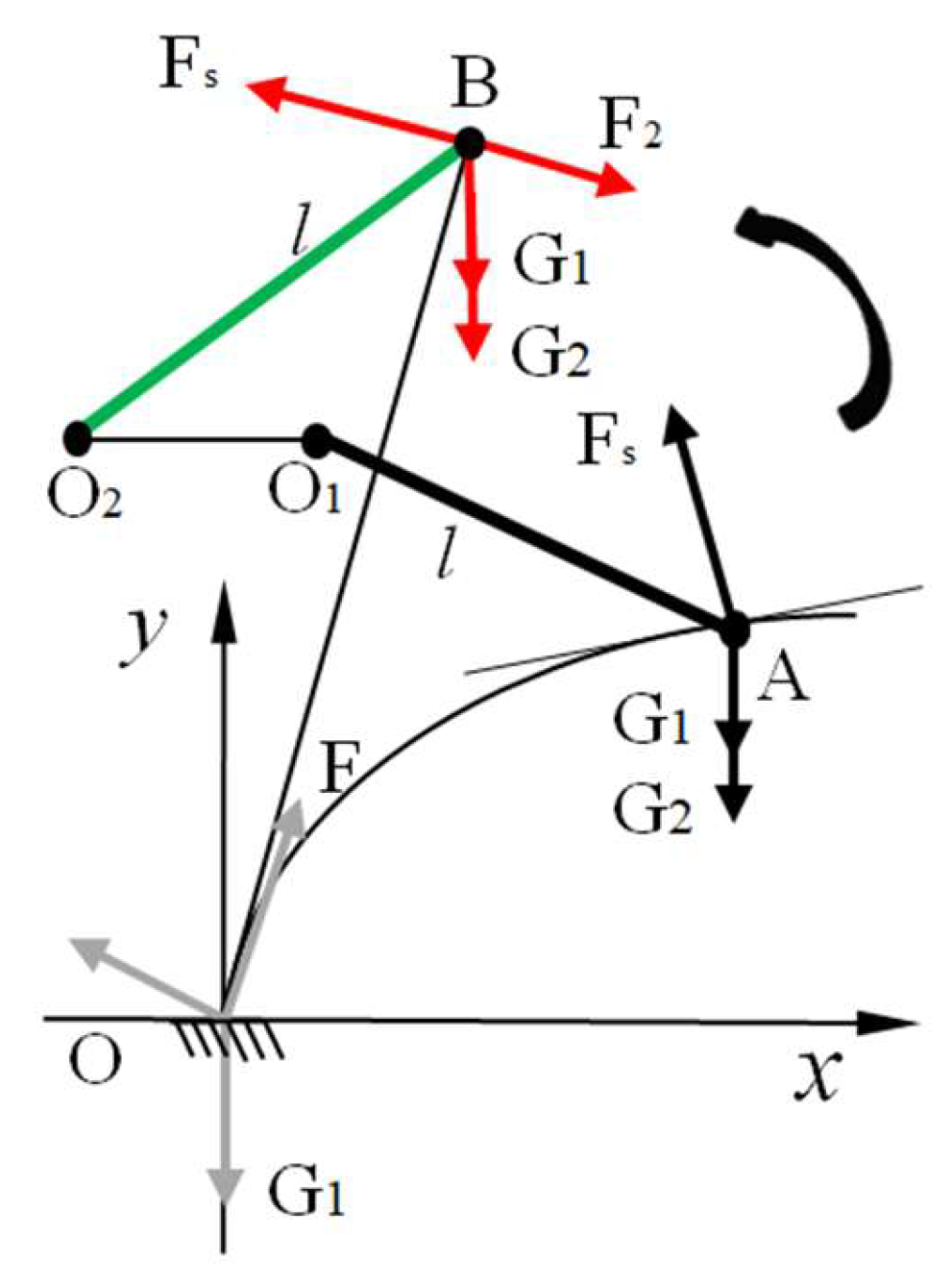
2.2.2. Theoretical Analysis
2.3. Key Components and Mathematical Models
2.4. Control System Design
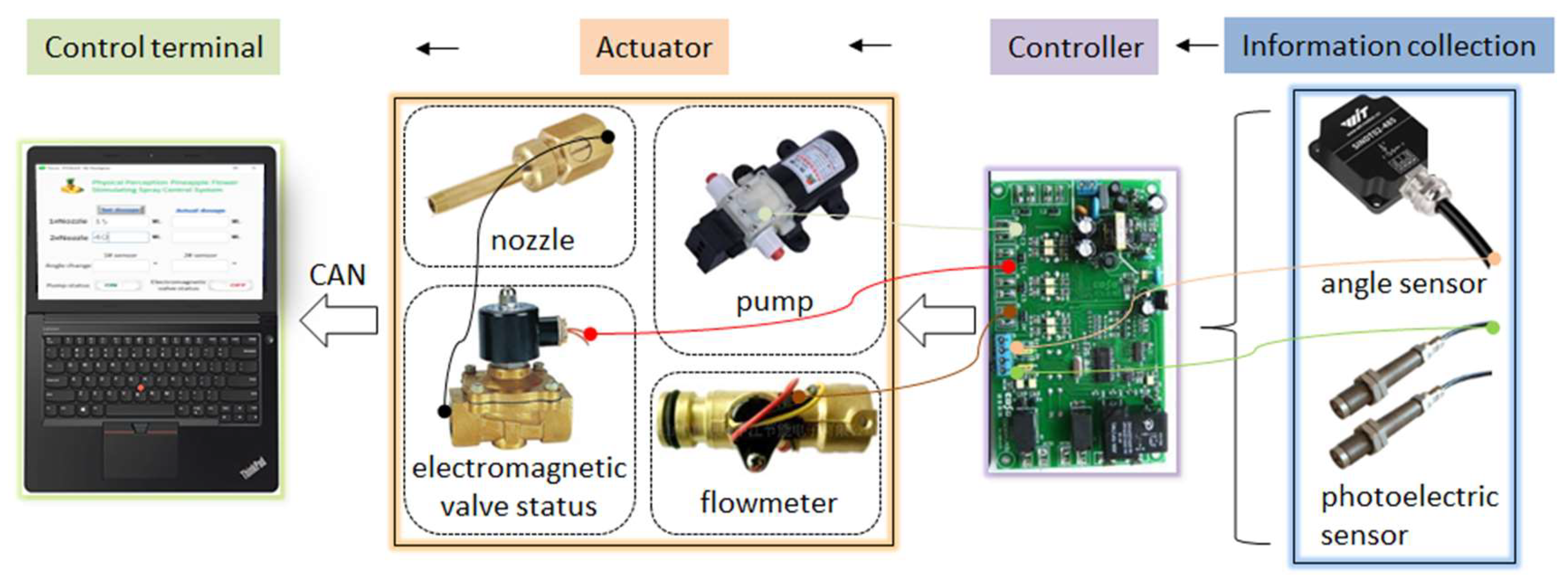
2.4.1. System Hardware Composition
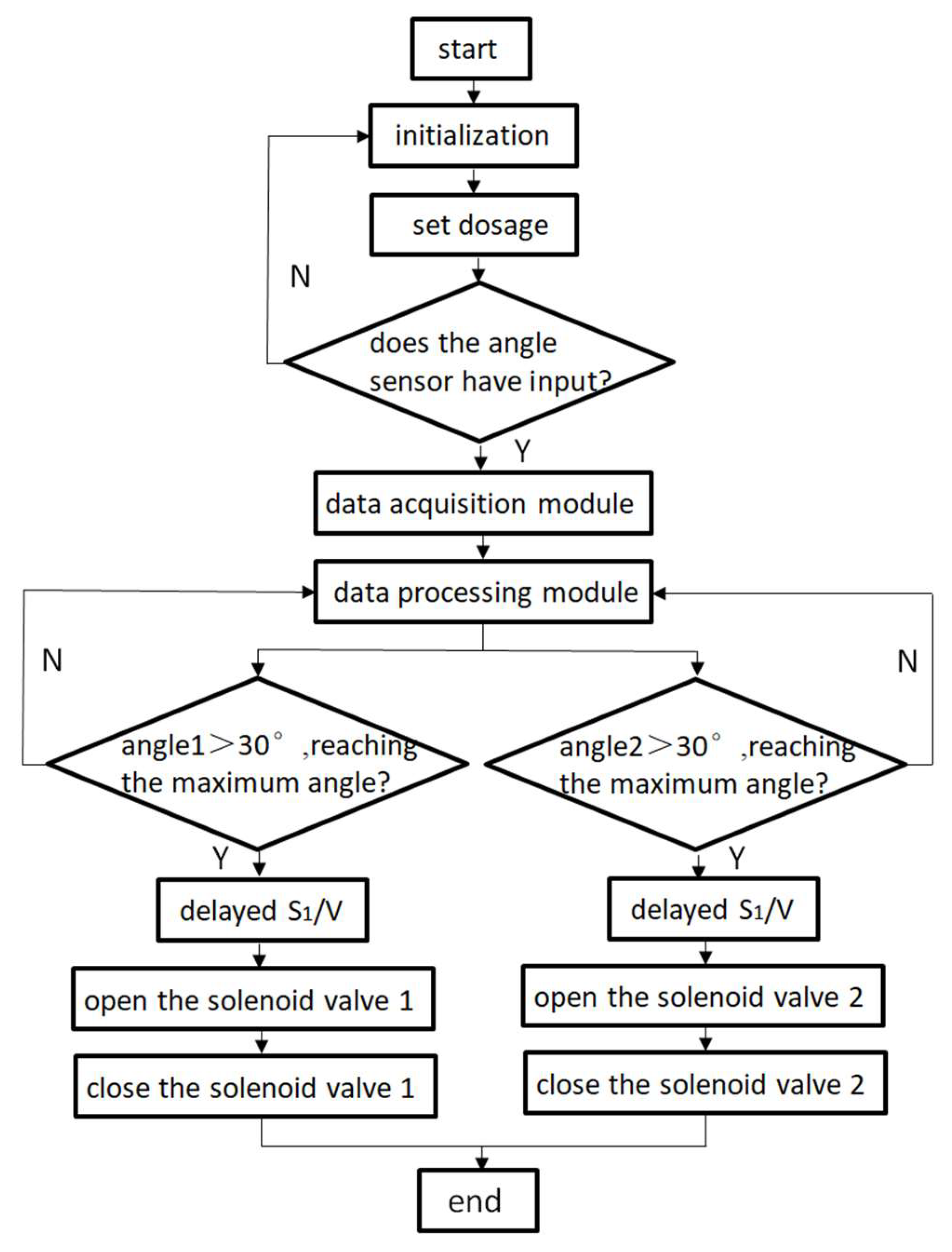
2.4.2. System Software Design
| Algorithm 1 Partial programs and algorithms |
| void control_valve2(void) word_union angle_temp2; angle_temp2.Byte[0]= modbus_2m.RxData[4]; angle_temp2.Byte[1]= modbus_2m.RxData[3]; angle2 = angle_temp2.Word*1800/32,768; if(angle2>30) Set_PB6; if(pulseCount2> t=LCOSβ-S(1−Δα)){ Clear_PB6; pulseCount2=0; void control pump(void) if((HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_5)==1)||(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_6)==1)) |
2.4.3. Communication Protocol
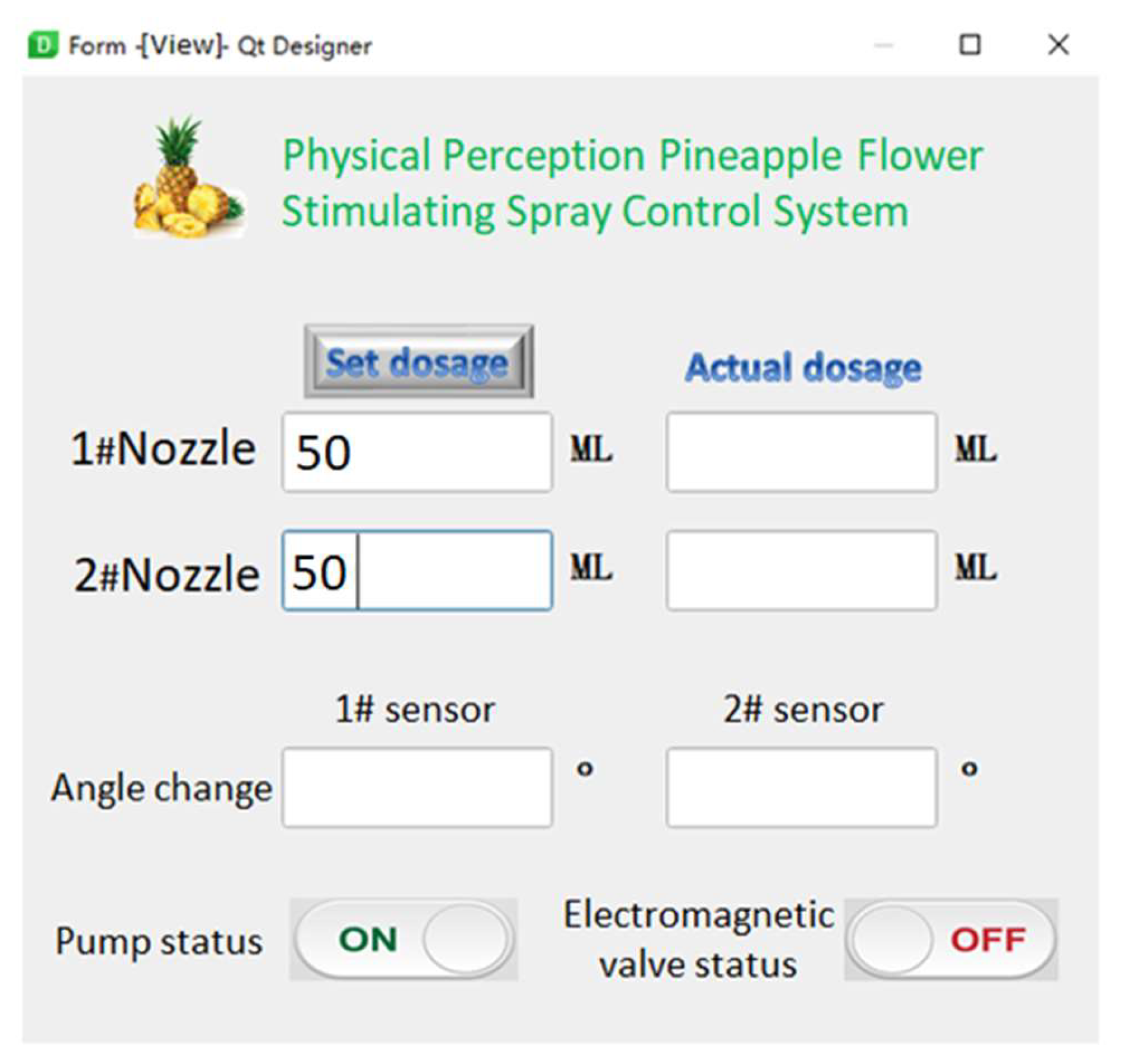
2.4.4. Human–Computer Interaction Interface Design
3. Experiments
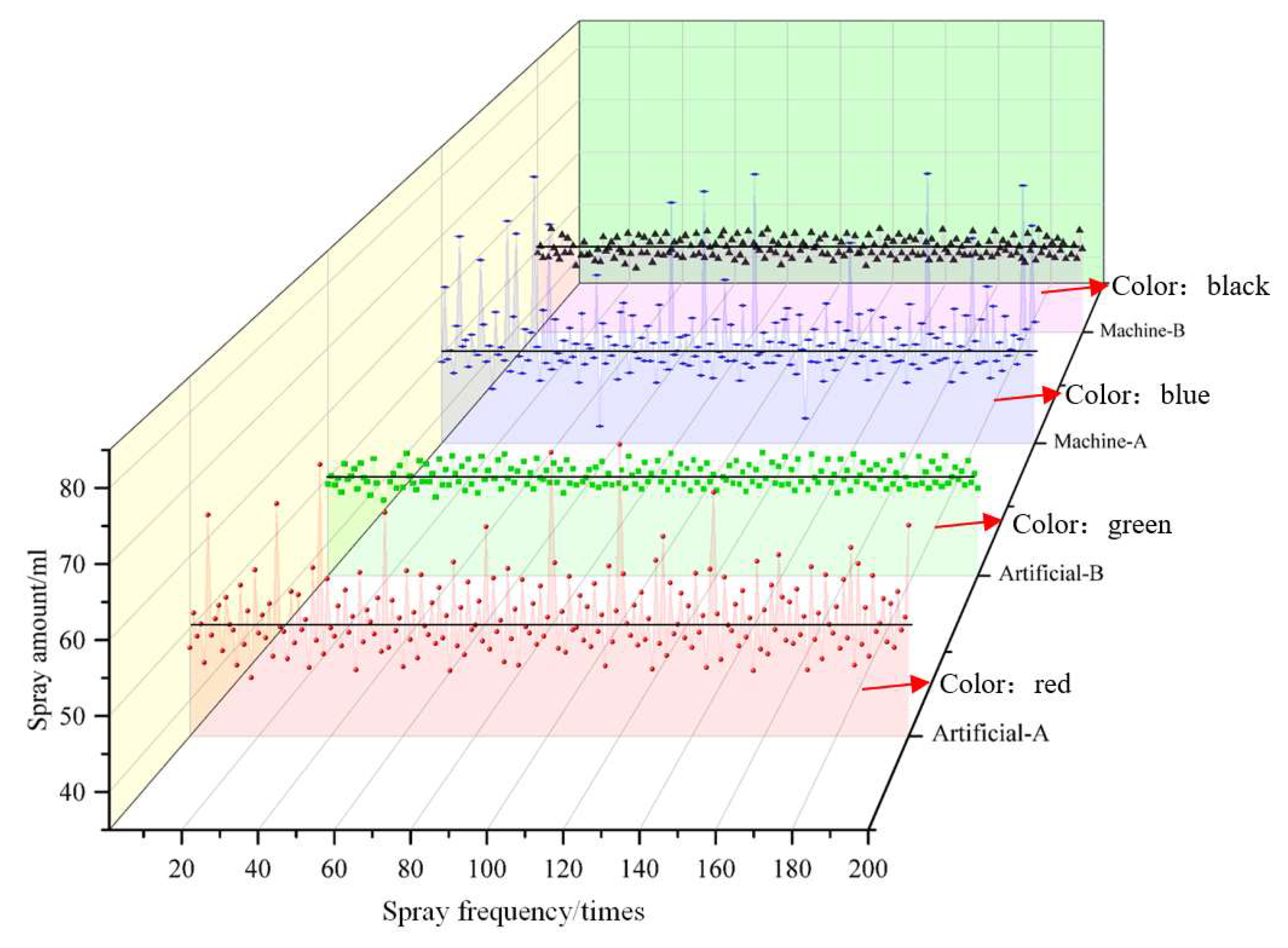
3.1. Spray Rate Accuracy Test
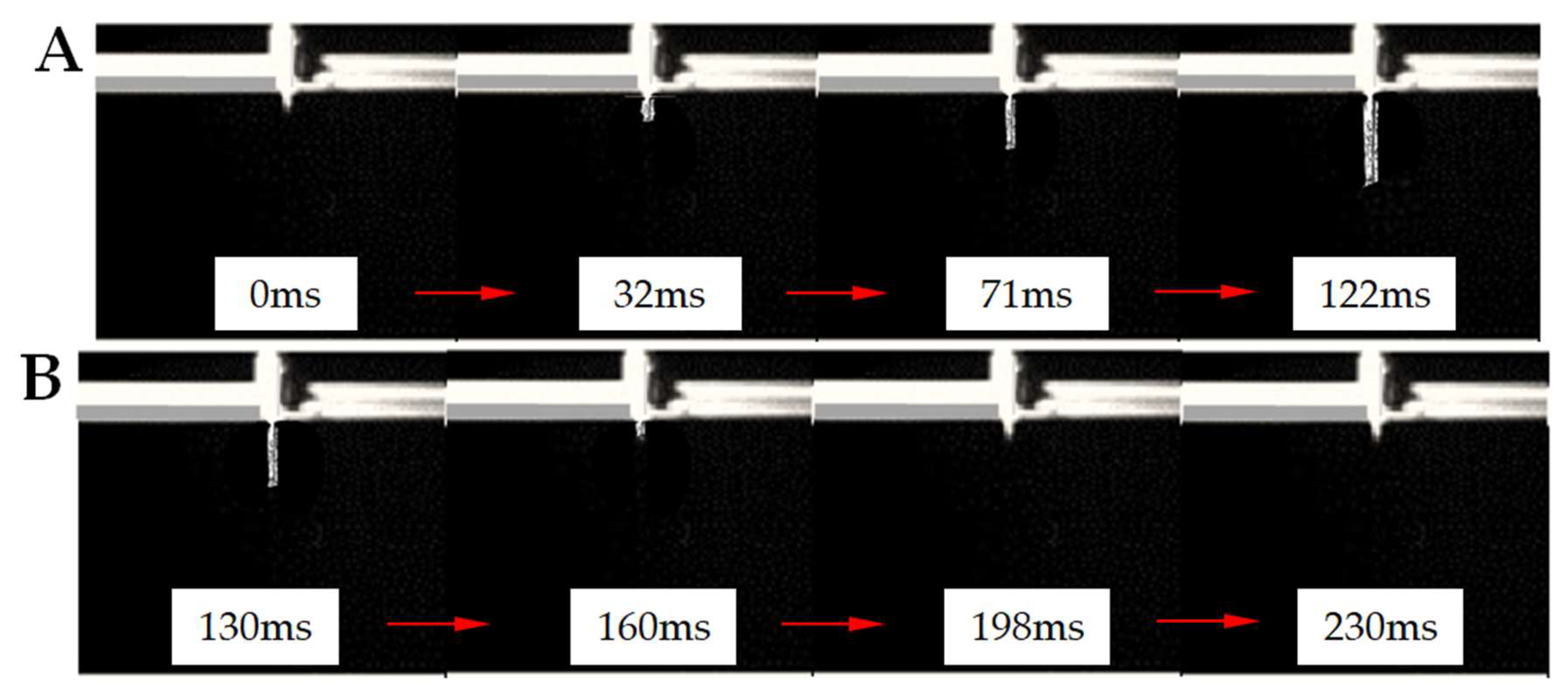
3.2. Measurement of Nozzle Opening and Closing Time
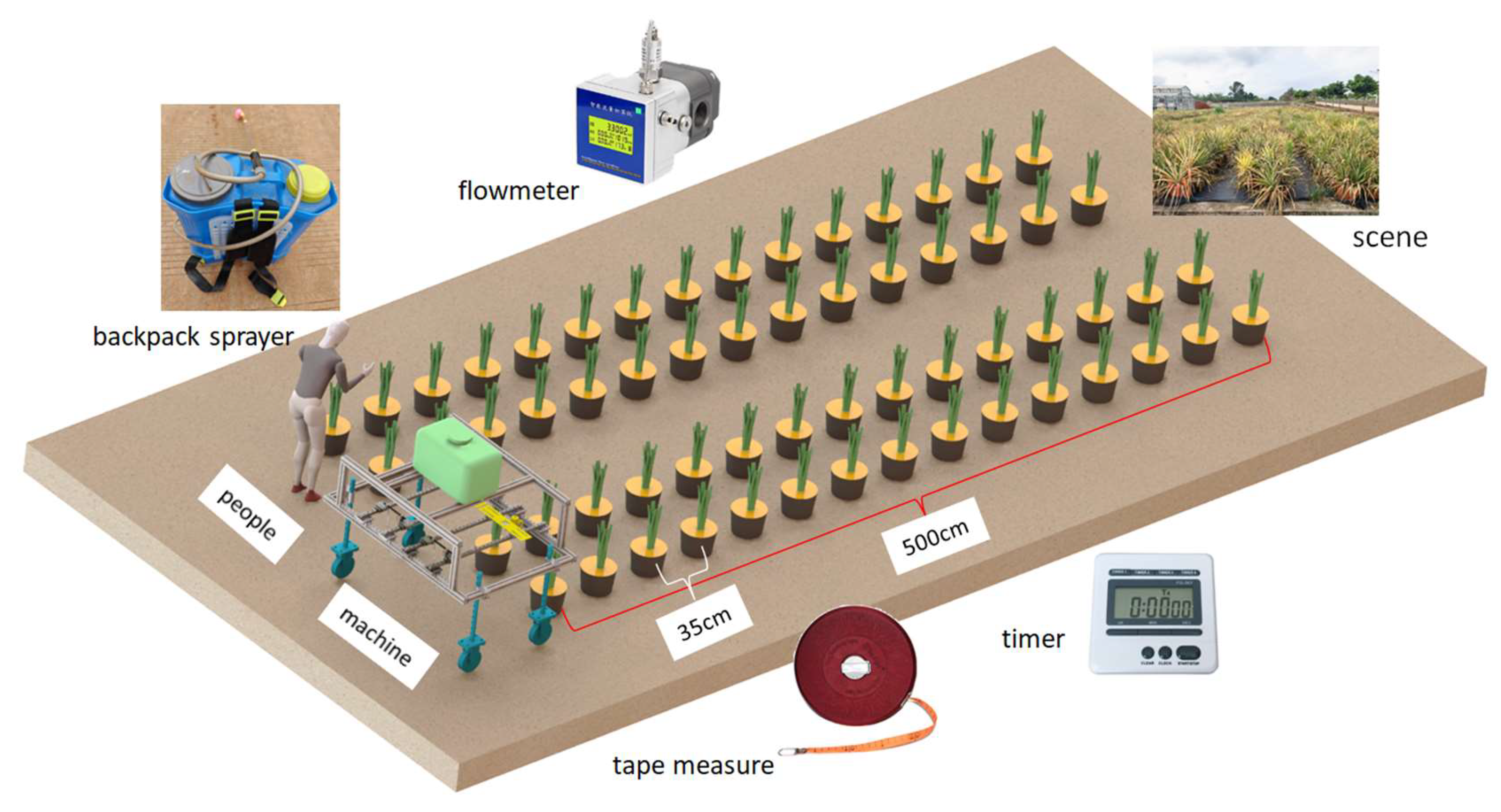
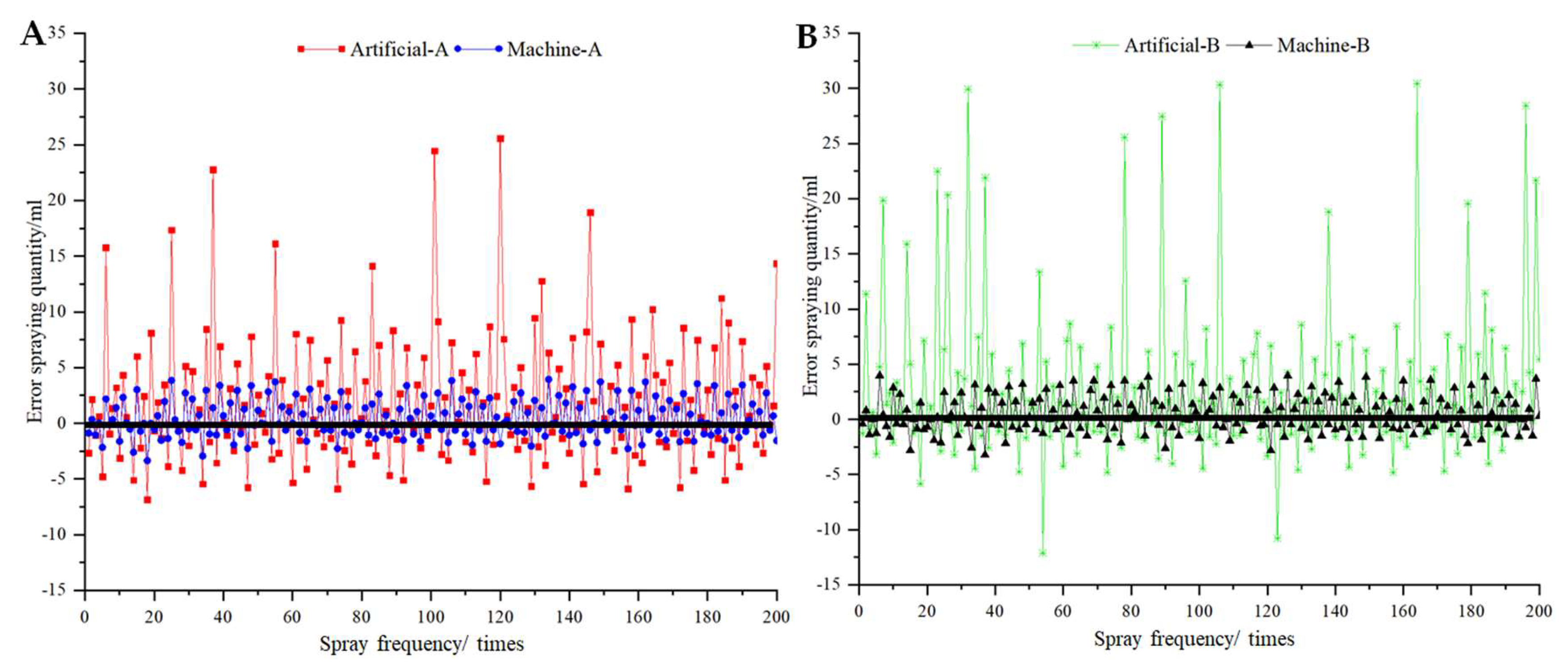
3.3. Prototype Testing
- (1)
- Dose Consistency Verification: Fixed total volume allocation controlled for chemical consumption variables.
- (2)
- Operational Efficiency Benchmarking: Quantitative comparison of human vs. machine performance under matched parameters.
- (3)
- System Robustness Assessment: Repeated trials (Groups A/B) to evaluate prototype reliability.
- (1)
- Vegetative Occlusion: Leaf interference during core targeting.
- (2)
- Dynamic Response Lag: Mechanical delay in nozzle actuation.
- (3)
- Morphological Variability: Plant-to-plant structural differences.
4. Discussion
5. Conclusions
- (1)
- By analyzing the physical and mechanical characteristics of pineapple plants, a method for locating the core of pineapple plants is proposed. The contact motion process between the sensing mechanism and pineapple leaves was analyzed, and a mathematical model was established to provide theoretical support for the design of targeted spraying control systems.
- (2)
- We designed the control logic, scheme, and key components of the entire system, selected the hardware reasonably, used STM32 embedded technology to program the system software, and used QT software to design the human–computer interaction interface. We connected the computer terminal through CAN bus communication technology, collected and analyzed data, and displayed them in real-time for operators to observe the operation status.
- (3)
- We conducted tests on spraying accuracy, measurements of nozzle opening and closing times, and evaluations of prototype performance. The experimental results indicated an average error of 2.72% in spraying accuracy and an average nozzle opening and closing time of 0.111 s. At the conventional operational speed for pineapple flowering induction spraying, the delay compensation distance amounted to 55.5 mm. The average errors associated with machine spraying were 7.1% and 6.4%, respectively, which were lower than those of manual spraying, exhibiting higher stability. Additionally, operational efficiency was enhanced, resulting in savings of over 67,500 mL of pesticide per hectare. However, there were instances of missed spraying, with a rate of 5% to 6%. Overall, the performance was satisfactory and capable of meeting the requirements for pineapple flowering induction spraying operations.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, Q.; Zhou, S.L.; Deng, G.R.; Li, Q.Y.; Huang, Q.Y.; Li, G.J. The current situation and countermeasures of industrial development in the main pineapple producing areas of China. Mod. Agric. Equip. 2024, 45, 11–15+20. [Google Scholar]
- He, G.Y.; Huang, J.J.; Wu, W.; Zhang, J.; Wang, Z. Analysis and promotion strategy for the comparative advantage of pineapple production in Hainan province. Chin. J. Trop. Agric. 2024, 44, 39–44. [Google Scholar]
- Liu, T.H.; Cheng, Y.F.; Li, J.Y.; Chen, S.; Lai, J.; Liu, Y.; Qi, L.; Yang, X. Feeding-type harvesting mechanism with the rotational lever for pineapple fruit. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2023, 39, 27–38. [Google Scholar]
- Wang, G.R. China Rural Statistical Yearbook; 7-33 (Fruit production by Region); China Statistics Press: Beijing, China, 2024. [Google Scholar]
- FAO. Available online: https://www.fao.org/statistics/zh/ (accessed on 6 March 2025).
- Cai, Z.Y.; Wang, X.M.; Dong, L.; Liu, Y.Q.; Fang, W.K.; Deng, B.; Xu, J.; Ren, H.; Qiu, W.W.; Su, W.Q.; et al. Effects of natural flowering and ethephon induction on fruit and quality of 7 pineapple varieties. Mol. Plant Breed. 2022, 20, 7902–7913. [Google Scholar]
- Zhang, J.Z.; Yan, C.M.; Li, B.S.; Shi, W.Q.; Liu, Y.N. Investigation and analysis of leaf yellowing of pineapple plants in the dry season. Chin. J. Trop. Agric. 2012, 32, 16–19. [Google Scholar]
- Liu, S.H.; Yang, Y.M.; Zhu, Z.Y.; Sun, W.S.; Wu, Q.S.; Sun, G.M. The influence of planting period on the natural flowering and fruiting of “MD-2” pineapple. South China Fruits 2014, 43, 89–91. [Google Scholar]
- Chen, J.; Zeng, H.; Zhang, X.M. Integrative transcriptomic and metabolomic analysis of D-leaf of seven pineapple varieties differing in N-P-K% contents. BMC Plant Biol. 2021, 21, 550. [Google Scholar] [CrossRef]
- Santos, M.P.; Maia, V.M.; Oliveira, F.S.; Pegoraro, R.F.; Santos, S.R.D.; Aspiazú, I. Estimation of total leaf area and D leaf area of pineapple from biometric characteristics. Rev. Bras. Frutic. 2018, 40, 1–5. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, C.H.; Fan, C.; Wu, J.F.; Dai, H.F.; Chen, J.R. Influence of exogenous GA3 application on growth and chemical quality of pineapple fruits. Guangdong Agric. Sci. 2012, 39, 42–43. [Google Scholar]
- Pu, Y.; Lin, W.Q.; Liu, C.Y.; Liu, S.H.; Wu, Q.S.; Sun, W.S.; Lu, X.H.; Gao, X.Y.; He, J.J. Effects of ethephonon flower bud initiation and fruit quality of five pineapple varieties. J. Fruit Sci. 2012, 41, 505–516. [Google Scholar]
- Cai, Y.; Yang, X.Y.; Li, M.; Chen, T.; Li, J.; Huang, Q.; Tan, Q.; Qin, X.; Tang, X.; Zhou, J. A Drone Uniform Sprayer Suitable for Pineapple Flower Stimulation. Guangxi Zhuang Autonomous Region Subtropical Crop Research Institute. Patent 201921245364.0, 22 May 2020. [Google Scholar]
- Zhang, R.H.; Zhang, Q.; Ou, J.S.; He, K.J.; Wang, Z.W.; Lu, D.X. Design and control of self-propelled pineapple flower induction machine with high gap. Mech. Electr. Eng. Technol. 2022, 51, 18–21. [Google Scholar]
- Liu, H.T.; Zhu, J.H.; Mai, Q.Q. An Automatic Flower Forcing Robot for Pineapple and Its Flower Forcing Inducing Method. Patent CN202310253502.4, 12 April 2024. [Google Scholar]
- Zhang, R.H.; Ou, J.S.; Li, X.M.; Ling, X.; Zhu, Z.; Hou, B.F. Lightweight algorithm for pineapple plant center detection based on improved an YOLOv4 model. Trans. Chin. Soc. Agric. Eng. 2023, 39, 135–143. [Google Scholar]
- Wang, B.B.; Liu, W.; Deng, W.P.; Chen, Z.W. A multifunctional field management machine based on pineapple mechanized field management technology design and testing. China South. Agric. Mach. 2024, 55, 1–5+25. [Google Scholar]
- Zhang, Z.J.; Huang, C.H.; Lan, J.H. Flower core recognition and location of pineapple flower inducing robot based on RGBD. Control. Theory Appl. 2025, 42, 281–288. [Google Scholar]
- Pan, K.Y.; Lin, W.J.; Chen, J.W.; Lin, Y.H. YOLO-CMST: Towards accurate pineapple flowering induction using YOLO-based models with the Cross Multi-Style Translator. Comput. Electron. Agric. 2025, 235, 110315. [Google Scholar] [CrossRef]
- Liu, W.; Dong, W.; Ye, Z.L.; Xie, Y.L.; Zhang, X.H.; Li, R.X.; Liu, G.H. Effects of different flower forcing methods on flowering and fruit quality of pineapple ‘Tainong 16’. J. Trop. Biol. 2024, 15, 315–322. [Google Scholar]
- Wang, L.; Li, Y.; Jin, X. Floral transcriptomes reveal gene networks in pineapple floral growth and fruit development. Commun. Biol. 2020, 3, 500. [Google Scholar] [CrossRef]
- Jin, F.L.; Zhang, M.Q.; Hu, X.Z.; He, F.G.; Cui, Z.D.; Deng, G.R. Test analysis of ridge double-row pineapple transplanting machine. Mod. Agric. Equip. 2023, 44, 18–23. [Google Scholar]
- Liu, C.H.; He, H.; Zhou, C.P.; Wu, X.M.; Qiu, R.B.; Yang, M.; Wei, Y.R. High-quality and high-efficiency cultivation model of “one fertilizer-two prevention-three reduction” for pineapple production. China Trop. Agric. 2024, 10, 72–75. [Google Scholar]
- Gao, Y.Y.; Wang, X.; Yang, S.; Zhai, C.Y.; Zhao, X.G.; Zhao, C.J. Development of CAN-based sowing depth monitoring and evaluation system. Trans. Chin. Soc. Agric. Mach. 2019, 50, 23–32. [Google Scholar]
- Okajima, J.; Kato, M.; Hayakawa, A. Investigation of bimodal characteristics of the droplet size distribution in condensation spray. Sci. Rep. 2023, 13, 12006. [Google Scholar]
- Wang, Z.; Zhang, Z.; Wang, Q. A nasal spray vaccination device based on Laval nozzle and its experimental test. Sci. Rep. 2023, 13, 6267. [Google Scholar]
- Zhou, L.; Matsumoto, T.; Tan, H.W. Developing single nucleotide polymorphism markers for the identification of pineapple (Ananas comosus) germplasm. Hortic. Res. 2015, 13, 15056. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transmission Direction | Name | Priority | Extended Data Page | Data Page | Protocol Data Unit (PDU) Format | PDU | Parameter Group No. |
|---|---|---|---|---|---|---|---|
| Computer to Controller | Homework start/stop control | 3 | 0 | 0 | F3 | 01 | 00F30116/62465 |
| 1#Nozzle | 4 | 0 | 0 | F4 | 01 | 00F40116/62721 | |
| 2#Nozzle | 4 | 0 | 0 | F4 | 02 | 00F40216/62722 | |
| …… | 4 | 0 | 0 | F4 | …… | …… | |
| N#Nozzle | 4 | 0 | 0 | F4 | 0n | 00Fn16/n | |
| Controller to Computer | Operating Speed | 5 | 0 | 0 | F5 | 01 | 00F50116/62977 |
| Angle Change | 5 | 0 | 0 | F5 | 02 | 00F50216/62978 | |
| Real-time Traffic | 5 | 0 | 0 | F5 | 03 | 00F50316/62979 |
| Test Number | Actual Dosage Added/L | Monitoring Dosage/L | Error Rate/% | Average Error Rate/% |
|---|---|---|---|---|
| 1 | 15.36 | 16.03 | 4.36 | 2.72 |
| 2 | 23.45 | 24.16 | 3.03 | |
| 3 | 35.68 | 36.62 | 2.63 | |
| 4 | 48.27 | 49.29 | 2.11 | |
| 5 | 56.53 | 57.36 | 1.47 |
| Group | Total Time/s | Residual Dosage/mL | Number of Leak Sprays | Leakage Rate/% | Average Error/% | CV/% | |
|---|---|---|---|---|---|---|---|
| Group 1 | A-A | 83.5 | 1610 | 0 | 0 | 20.6 | 2.9 |
| M-A | 78.6 | 2520 | 12 | 6 | 7.1 | 4.6 | |
| Group 2 | A-B | 80.9 | 1540 | 0 | 0 | 18.4 | 2.5 |
| M-B | 76.2 | 2400 | 10 | 5 | 6.4 | 5.5 | |
| Group | Number of Samples | t | Significance | Mean Difference | Std. Error Difference | 95% Confidence Interval of the Difference | ||
|---|---|---|---|---|---|---|---|---|
| Lower | Upper | |||||||
| Group 1 | A-A | 200 | 3.570 | <0.001 | 1.515 | 0.424 | 0.681 | 2.349 |
| M-A | 188 | |||||||
| Group 2 | A-B | 200 | 4.342 | <0.001 | 2.276 | 0.524 | 1.245 | 3.307 |
| M-B | 190 | |||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, S.; Zheng, S.; Dai, Y.; Deng, G.; Li, G.; Cui, Z.; Wang, X.; Li, L.; He, F.; Yan, B.; et al. Design of and Experiment with Physical Perception Pineapple Targeted Flower Forcing-Spraying Control System. Horticulturae 2025, 11, 688. https://doi.org/10.3390/horticulturae11060688
Zhou S, Zheng S, Dai Y, Deng G, Li G, Cui Z, Wang X, Li L, He F, Yan B, et al. Design of and Experiment with Physical Perception Pineapple Targeted Flower Forcing-Spraying Control System. Horticulturae. 2025; 11(6):688. https://doi.org/10.3390/horticulturae11060688
Chicago/Turabian StyleZhou, Sili, Shuang Zheng, Ye Dai, Ganran Deng, Guojie Li, Zhende Cui, Xilin Wang, Ling Li, Fengguang He, Bin Yan, and et al. 2025. "Design of and Experiment with Physical Perception Pineapple Targeted Flower Forcing-Spraying Control System" Horticulturae 11, no. 6: 688. https://doi.org/10.3390/horticulturae11060688
APA StyleZhou, S., Zheng, S., Dai, Y., Deng, G., Li, G., Cui, Z., Wang, X., Li, L., He, F., Yan, B., Qin, S., Liu, Z., Chen, P., & Luo, Y. (2025). Design of and Experiment with Physical Perception Pineapple Targeted Flower Forcing-Spraying Control System. Horticulturae, 11(6), 688. https://doi.org/10.3390/horticulturae11060688