The performances of the modified pressure-correction are evaluated here. The method is compared to the augmented Lagrangian method which does not require a correction. It is also an opportunity to compare the approaches in a more general point of view. When no analytical solution is available, a Richardson extrapolation is used to compute a reference solution [
40]. We consider three values
,
, and
of a numerical parameter verifying consecutive ratios of two. The convergence rate
and the reference solution
are given by:
The asymptotical convergence zone has to be reached to obtain a relevant extrapolation.
5.1. Cylindrical Couette Flow
We consider a Couette flow between two cylinders of radius
m and
m. Their angular velocities are
rad·s
and
rad·s
. The solution is
for the velocity and
for the pressure with
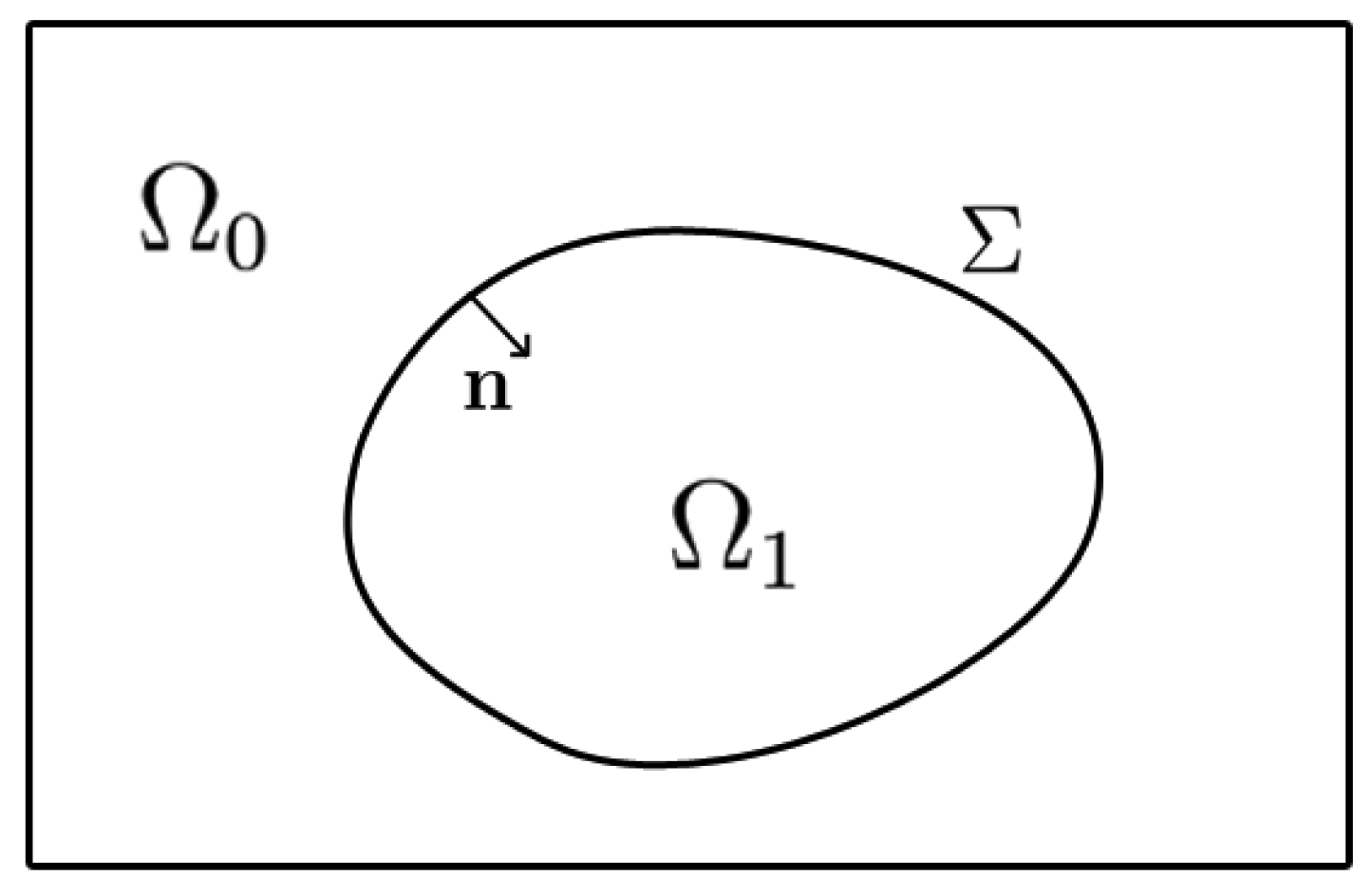
The NS equations are solved in a domain . The analytical solution is imposed on . The SMP method is used to impose a Dirichlet BC on the inner circle. For the augmented Lagrangian method, a value of the parameter is chosen.
The convergence study of the
relative spatial error for the second-order correction is given in
Table 1 and plotted in
Figure 3. These results are obtained with the rotational pressure-correction (same results with a negligible differential on the
error are obtained with the AL method) demonstrating the spatial accuracy of the modification. As expected for such a case [
14], a second order is obtained for the velocity. The convergence rate for the pressure error is around
. These results are compared with the first-order correction (
Table 2) where an order slightly superior to one is obtained for the velocity and a
order is obtained for the pressure. For both tables, the average number of solver iterations for the 30 first iterations is shown. The additional cost for the high-order method varies according to the mesh as critical cases occur (when a diagonal term is very small compared to extra-diagonal terms, i.e., when
in [
15]) depends on the position of
with respect to
. For the present case, the higher overcost for the pressure equation obtained with the
mesh is greatly compensated by the higher accuracy of the solution. On can notice that critical cases can be removed at the expend of a slight loss of accuracy by slightly moving the interface.
Table 3 gives the same convergence study for the rotational method without immersed-boundary correction for the pressure for a time step
s. As can be seen in
Figure 3, the lack of correction has almost no influence on the pressure. The convergence rate for the velocity is lower but acceptable. A factor ten is obtained between the solution with and without the correction for the finest mesh.
The time evolution of the solution is now evaluated. For a case with Dirichlet boundary conditions, the authors of [
30,
41] gave for the rotational method a rate of
for the velocity and
for the pressure.
Simulations with a
mesh are conducted with different time steps and velocity–pressure coupling methods. The instant
when the
error on the pressure reaches
and the instant
when the
error on the velocity reaches
are considered to study the convergence.
Table 4 shows the convergence of these values for the augmented Lagrangian and rotational pressure-correction methods, and for the Euler temporal schemes. The reference values are computed with the Richardson extrapolation using the three more refined values. A clear first-order convergence is obtained for the velocity and the pressure for both velocity–pressure coupling methods. Except for the larger time-steps, both methods give the same results.
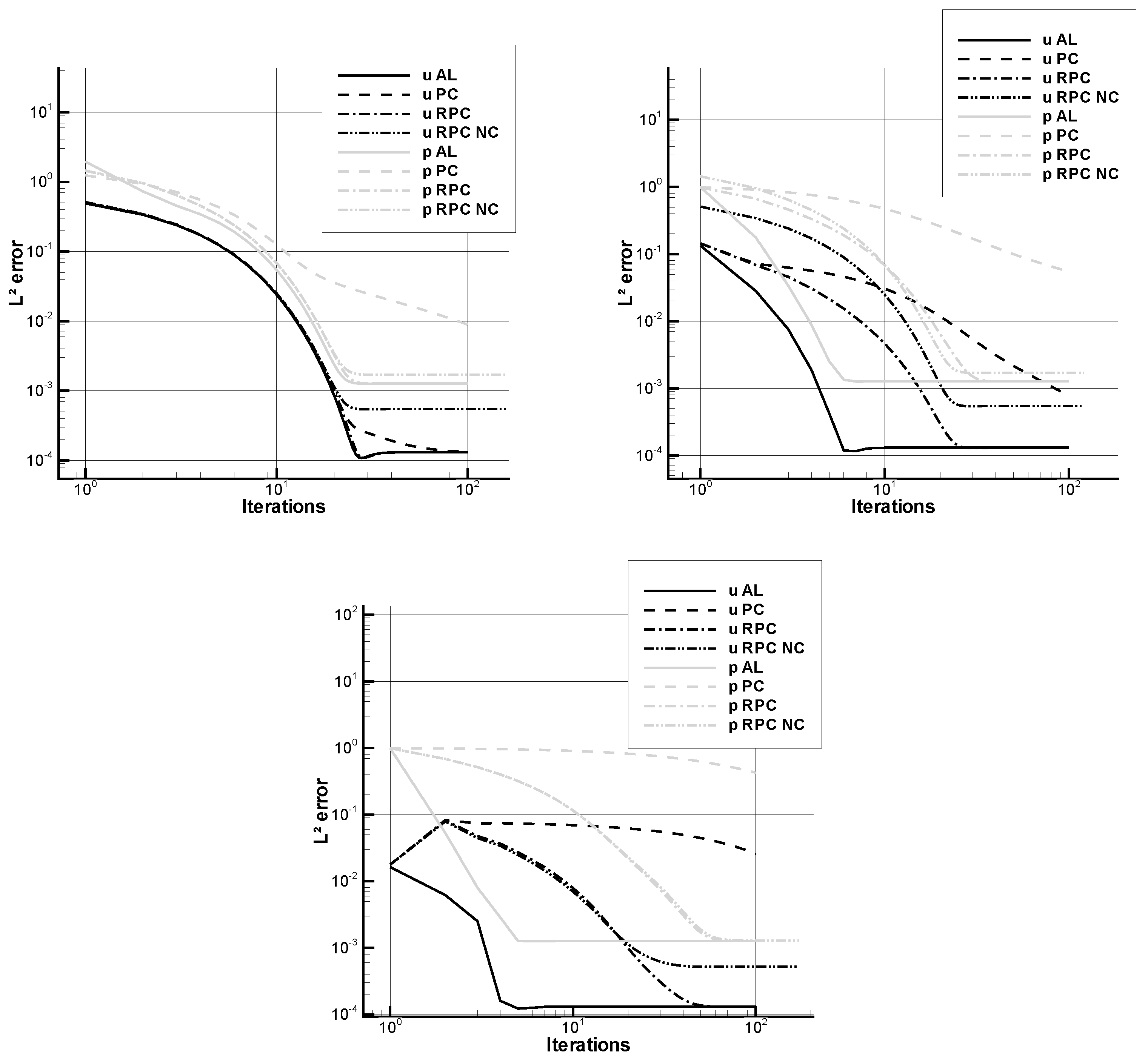
Figure 4 shows the evolution of the spatial error with respect to the number of time iterations for
s,
s, and
s while
Table 5 gives the values of
and
for these time steps. Due to its strong implicitation, the AL method is always converging faster than the pressure-corrections. One can notice that the temporal evolution of the solution for the rotational method without correction is quite similar to the evolution of the corrected methods up to an error of
on the velocity. For this case, the interest of the correction seems to be minor.
Figure 4 shows that the convergence of the incremental pressure-correction is much slower than with the other methods. For the present case, reaching the same level of error as with the two others methods is prohibitive.
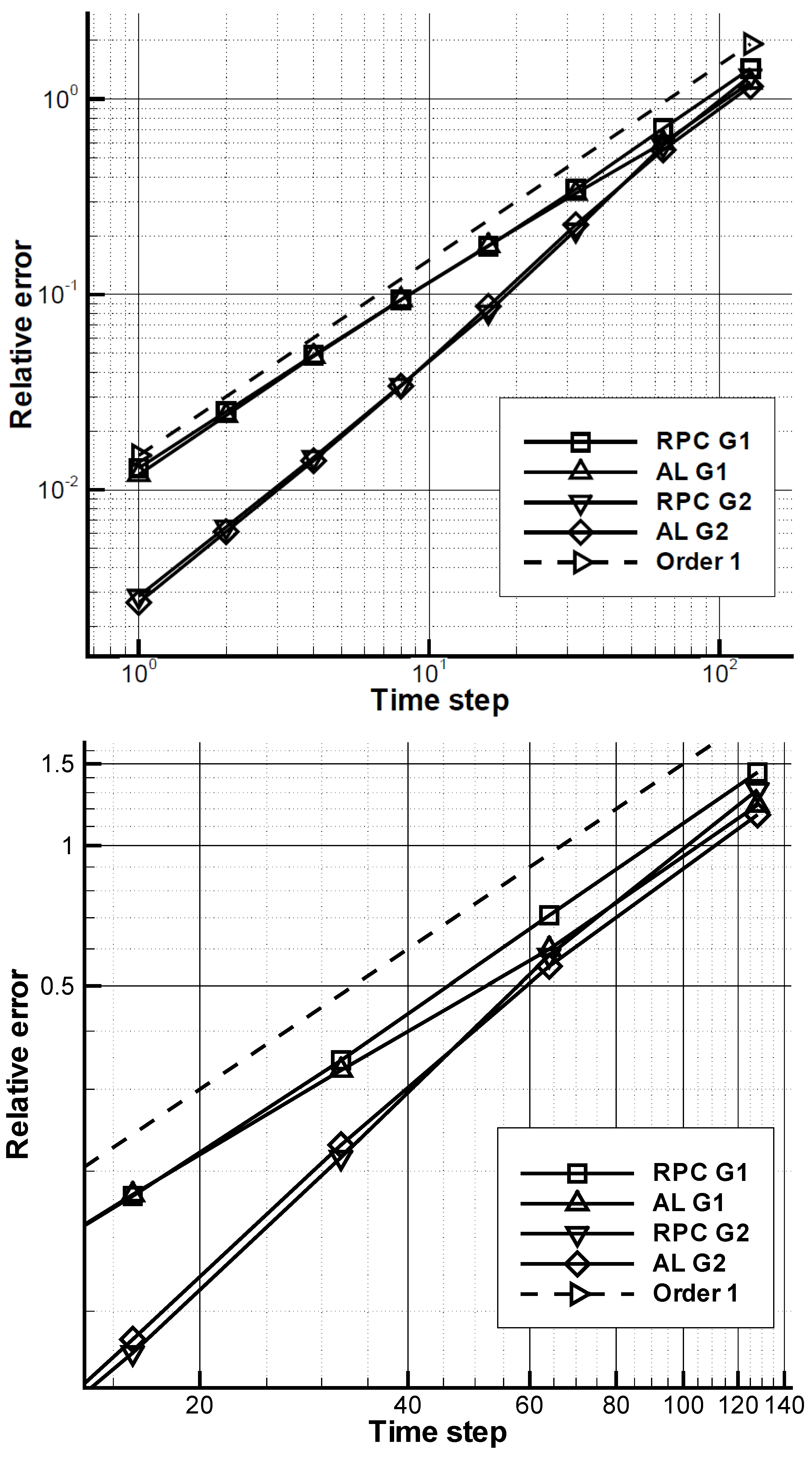
The curves of convergence for the second-order Gear scheme are shown in
Figure 5 (the error convergence for the velocity with the augmented Lagrangian method and for the first-order temporal scheme is given for comparison). The values are given in
Table 6. An irregular convergence is observed for the velocity. For time steps inferior to
, the error is under the Euler scheme error for all values and the asymptotical convergence zone seems to be reached. A first order of convergence rate is obtained for the pressure. An order of about
is obtained for the velocity with the pressure-correction which is far from the theoretical order of 2. The augmented Lagrangian method has lower errors but its convergence rate is about
in the asymptotical zone. Studies conducted in [
32] suggest that the augmented Lagrangian should reach a first order for the velocity and the pressure. The same behavior is obtained in [
42]. As the convergence rates are better for the first-order temporal scheme, a saturation effect can be involved. Compared to the classical studies, the immersed boundary correction could cause this saturation. The value of the parameter
is not involved here as the converged equations in
gives the same results. In this case the theoretical error study suggests a first order of convergence for the pressure. The use of a relatively coarse mesh seems not to be involved as we use the Richardson extrapolation to compute the solution so one can suppose that the spatial error does not mix with the temporal error. This point has to be investigated further.
Figure 5 shows the convergence for the augmented Lagrangian method with
. The error on the pressure is close to the other methods. For the smallest time steps, the error on the velocity oscillates around a value so we cannot use the Richardson extrapolation. This values is different from the value obtained with the other methods, so another saturation effect seems to be involved. For this reason, the reference value of the pressure-correction and the augmented Lagrangian with
is taken. Even if the convergence is stopped for the smaller time steps, an excellent error (compared to the other methods) is obtained.
To finish with this case,
Table 7 shows the spatial errors for various time steps with the rotational method without correction. Contrary to the corrected methods, the error at the stationary state depends on the time step even if its influence is small here. A quite surprising result is that the error decreases when the time step increases while Domenichini [
17] noticed the contrary (but for different cases and with a spectral solver).
5.2. Flow Past a Cylinder
The instationary flow past a cylinder of unit diameter is now simulated to study the temporal order of the method for an instationary case. We consider a cylinder of diameter D in a domain . The inlet velocity V and the fluid properties are set such that the Reynolds number is equal to 100.
The computational mesh is composed of
cells with an inner zone of dimensions
with a constant space step covered by
cells.
Figure 6 shows the mesh and the position of the cylinder. The cylinder is the immersed boundary and is located in the zone with constant step size as the method has not been implemented yet for irregular meshes. An Orlanski open boundary condition [
43] is imposed for the outflow.
The vorticity and the pressure are shown in
Figure 7. On can see that the vorticity in the periodic Bénard–von Kármán vortex street is strongly decaying in the
X direction compared to the standard solution of the literature. This difference is due to the coarseness of the mesh. However, the aim here is not to compare our results with the literacy so the size of the computational mesh is relatively moderate.
Table 8 and
Table 9 gives the values of a period of oscillation (a-dimensionalized by the minimum time step) for different time steps with the augmented Lagrangian an rotational methods with the first and second-order Gear schemes for the time derivatives. The convergence order is determined with the Richardson extrapolation performed with the three more refined time steps. The results in term of relative error are given in
Figure 8.
For both time schemes, the differences between AL and the rotational methods are non-negligible for the larger time steps, with a greater accuracy for the AL. As for the precedent case, it shows the advantage of the AL to deal with larger time steps. For the other time steps, both methodologies reach a similar accuracy. For the smaller time steps (where the asymptotic convergence seems to be reached), the convergence orders on the velocity and the pressure are about 1 for the Euler scheme and about
for the second-order Gear scheme. From [
41], the rate of error for the
-norm of the velocity of
is expected.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}