A Hybrid Analytics Paradigm Combining Physics-Based Modeling and Data-Driven Modeling to Accelerate Incompressible Flow Solvers



Abstract
:1. Introduction
2. Mathematical Modeling of Incompressible Flows
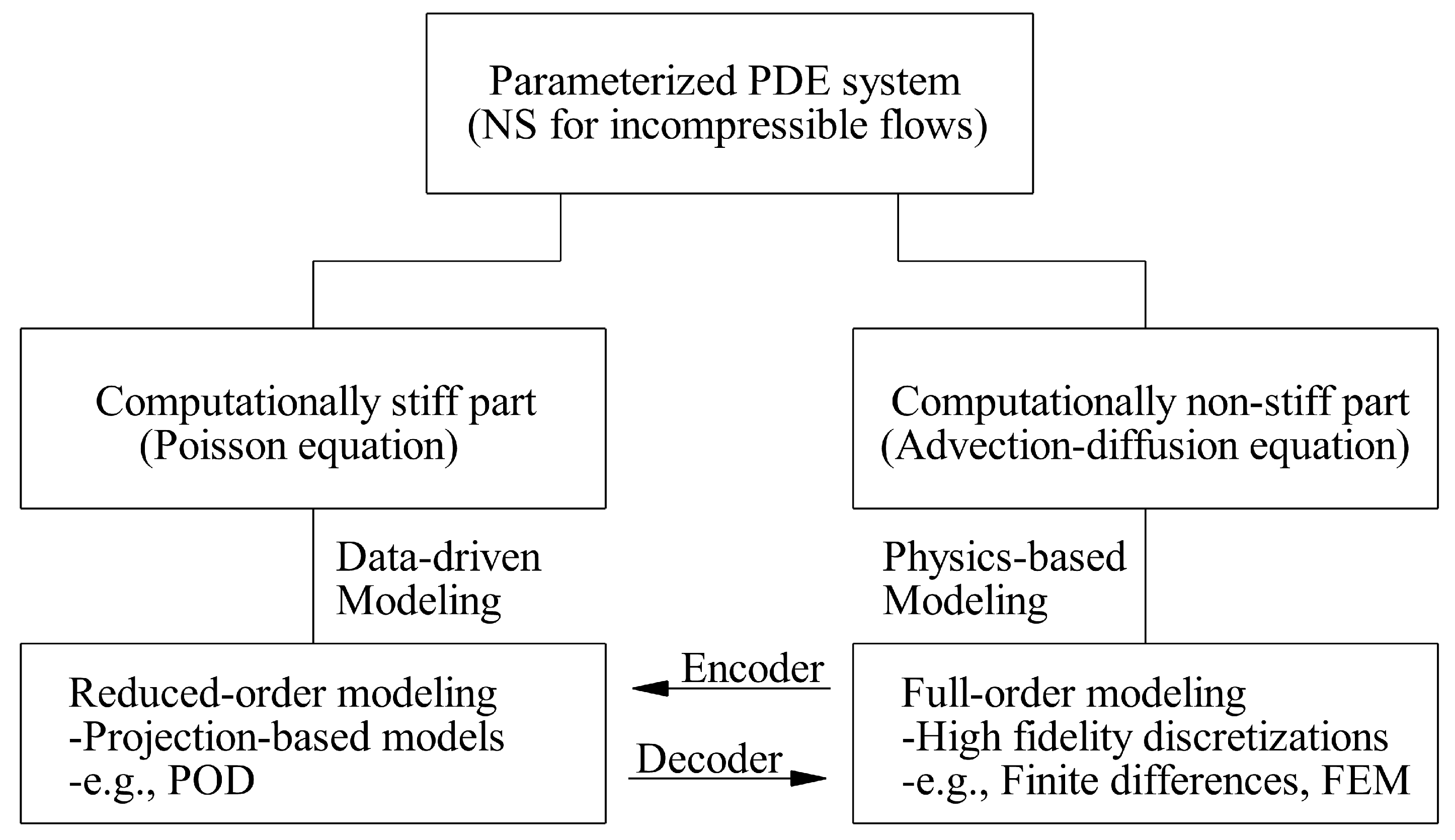
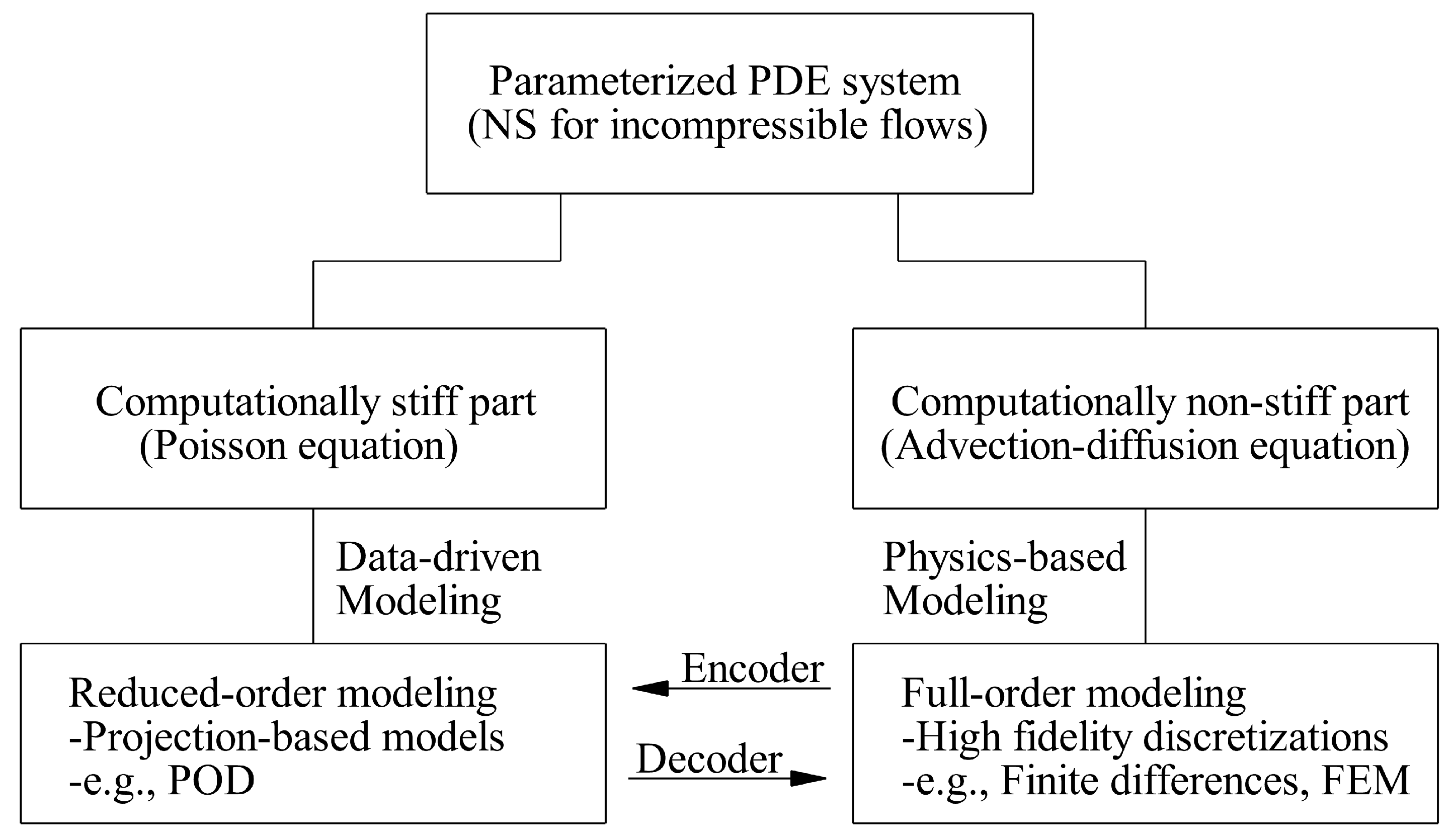
3. Hybrid Analytics
- Identify computationally stiff and non-stiff parts of the problem,
- Build a data-driven model to solve the stiff part efficiently,
- Establish encoder and decoder approaches for data transfer between the stiff and non-stiff sub-problems.
3.1. Physics-Based Modeling
3.2. Data-Driven Modeling
3.3. Hybrid Analytics ROM (HA-ROM) to Accelerate Incompressible Flow Solvers
- Offline analysis:
- (i)
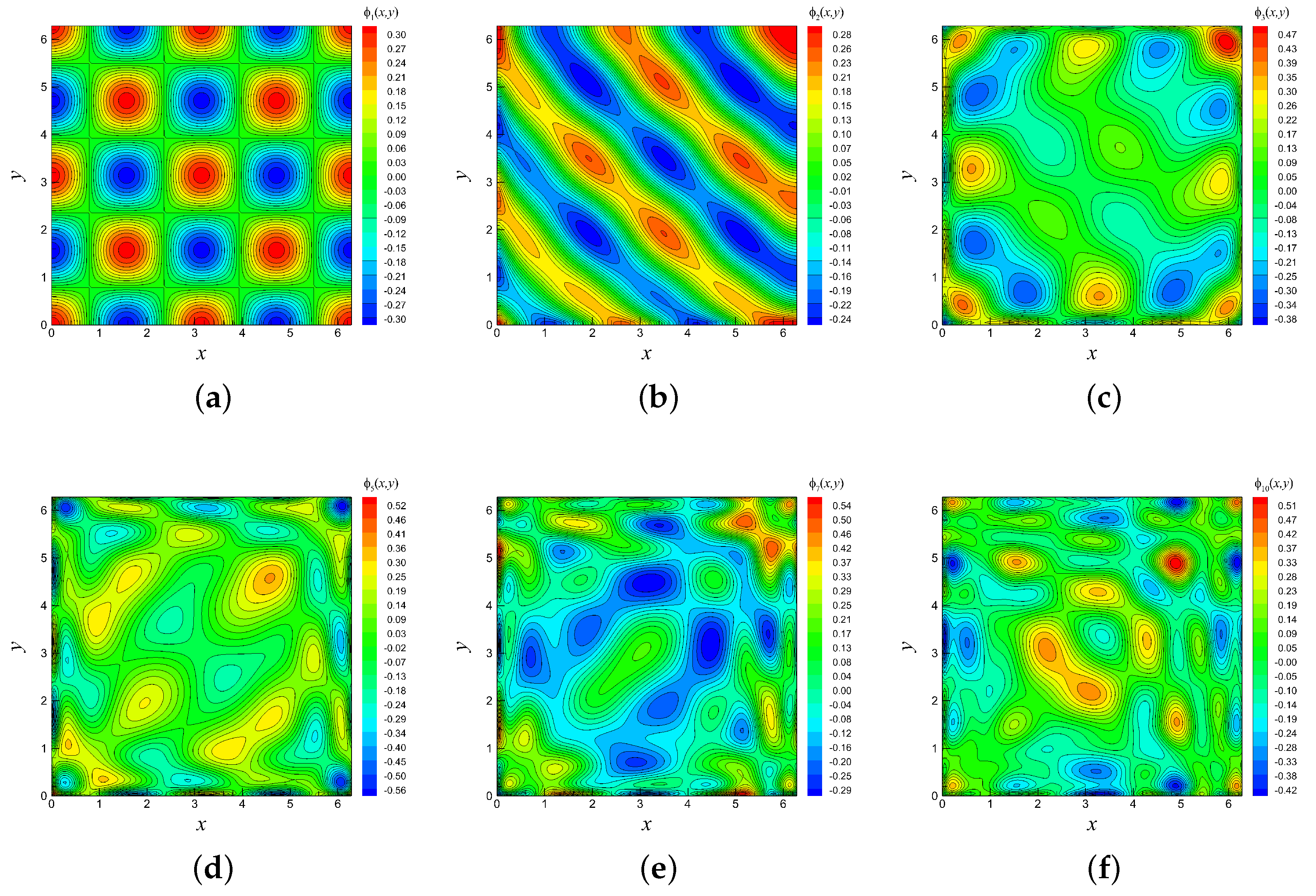
- Obtain a set of basis functions for representing dynamics of the problem and satisfying the boundary conditions for the stream function.
- (ii)
- Precompute ROM coefficients for the Poisson equation model as
- Online computation:
- (a)
- FOM update: given and fields, solve the advection–diffusion equation (i.e., computationally non-stiff part) and update the vorticity field:where refers to the numerical discretization operators given by Equations (22), (25) and (28). Before proceeding to the next computational step, the Poisson equation has to be solved (i.e., stiff part) to obtain the stream function.
- (b)
- Encoder (ROM ← FOM): transfer data from the full order space to the reduced order space by using the following projection:and compute an initial guess for the modal coefficients using the stream function at a known stage
- (c)
- ROM: solve the reduced order model of the Poisson equation until reaching a steady-state solution forSince we are interested in a steady-state solution, the Euler scheme can be used:where we consider in our simulations. However, it should be noted that larger can be used since the ROM equation is not limited to the numerical stability criterion of the discretized equation. Here, we specify a stopping criterion for the residual using the definition of the Euclidean norm as .
- (d)
- Decoder (ROM → FOM): transfer data from the reduced order space to the full order space by using the following definition:
- (e)
- Continue to step (a).
4. Results
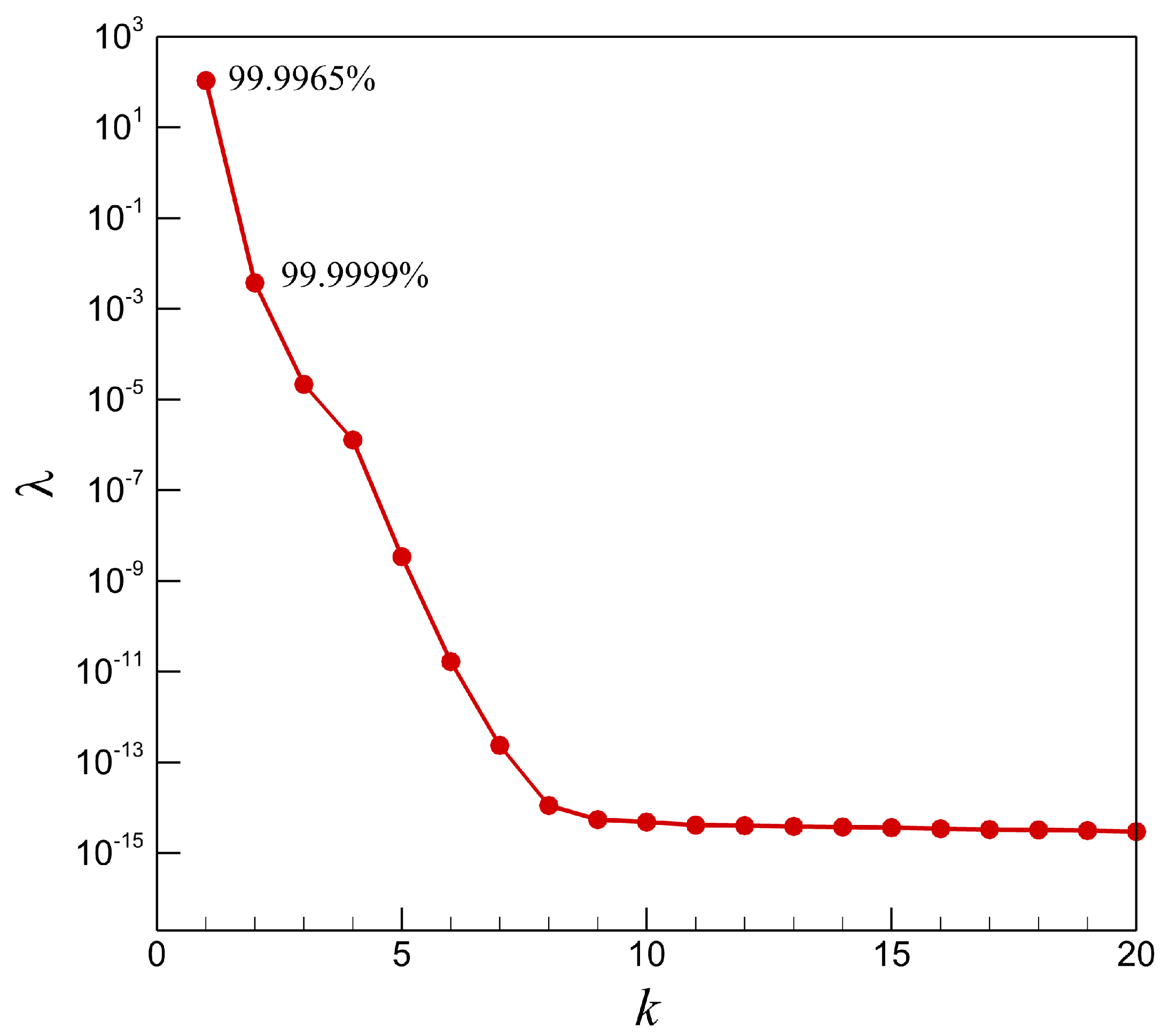
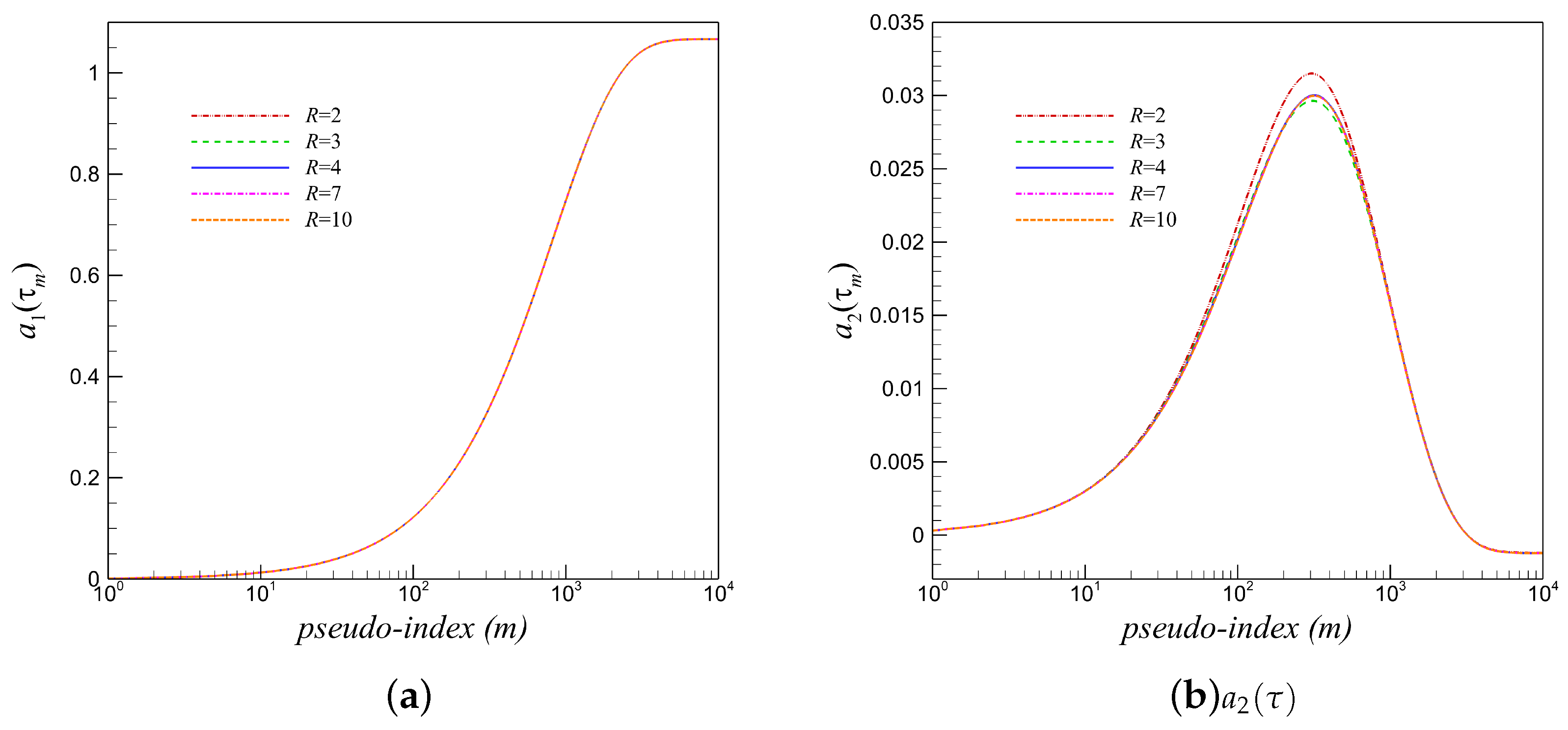
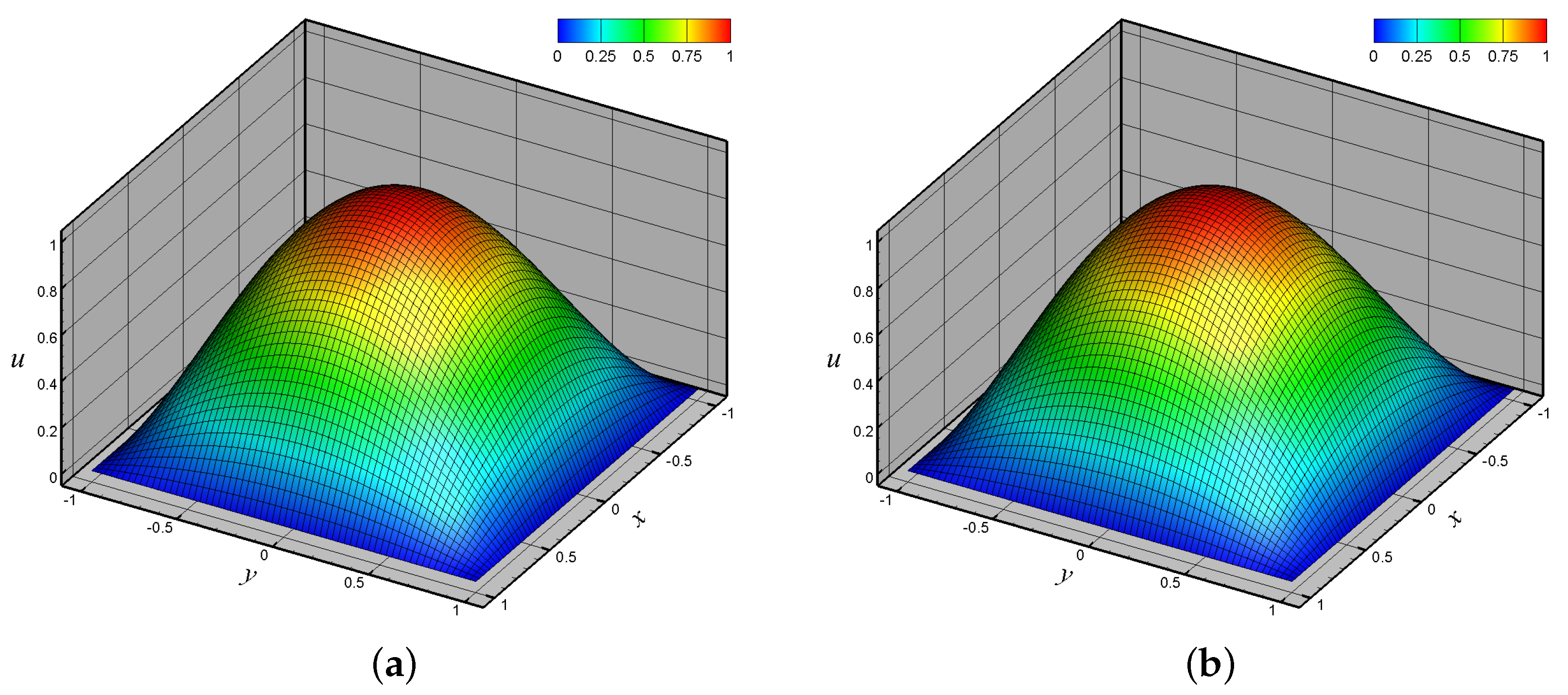
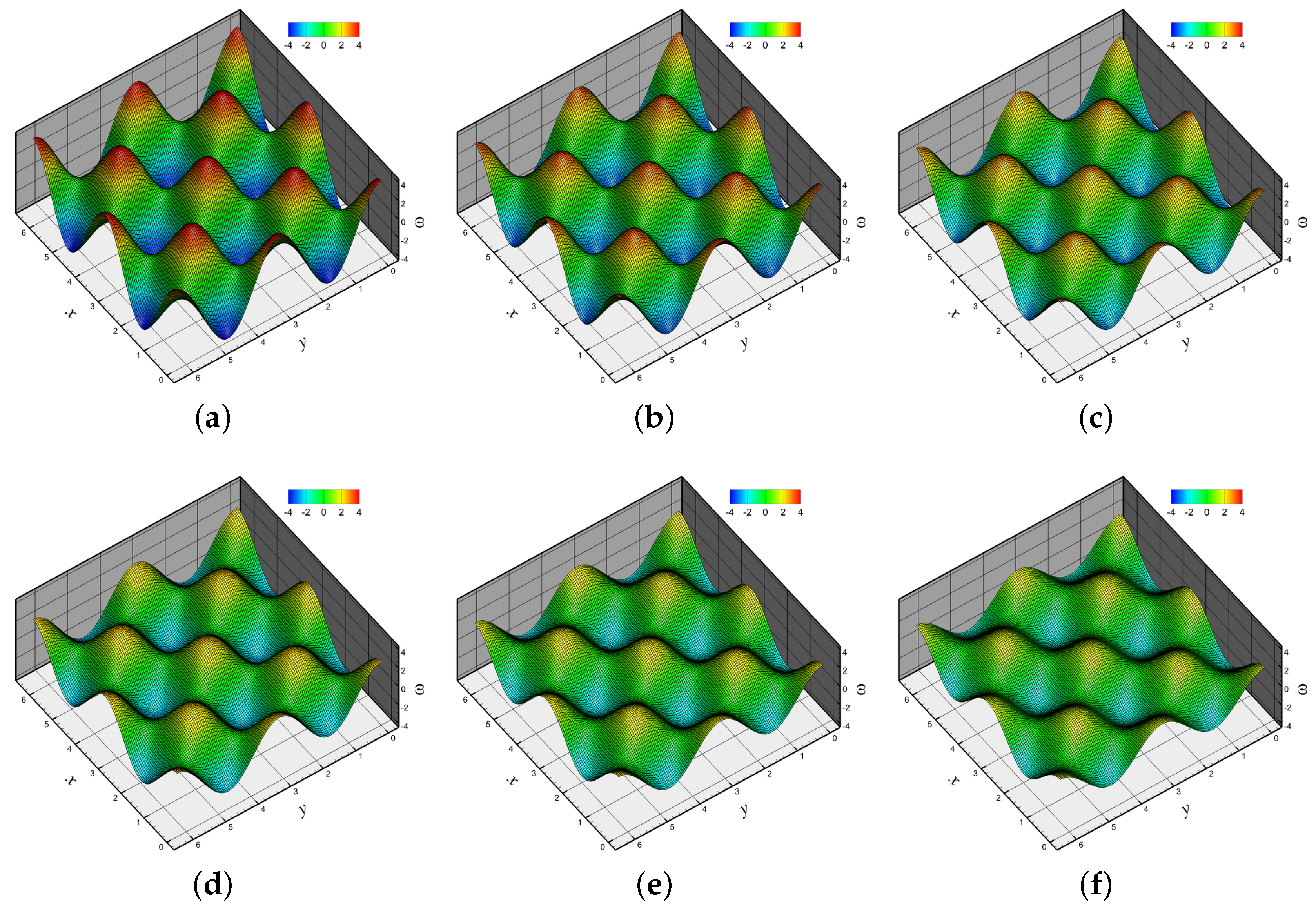
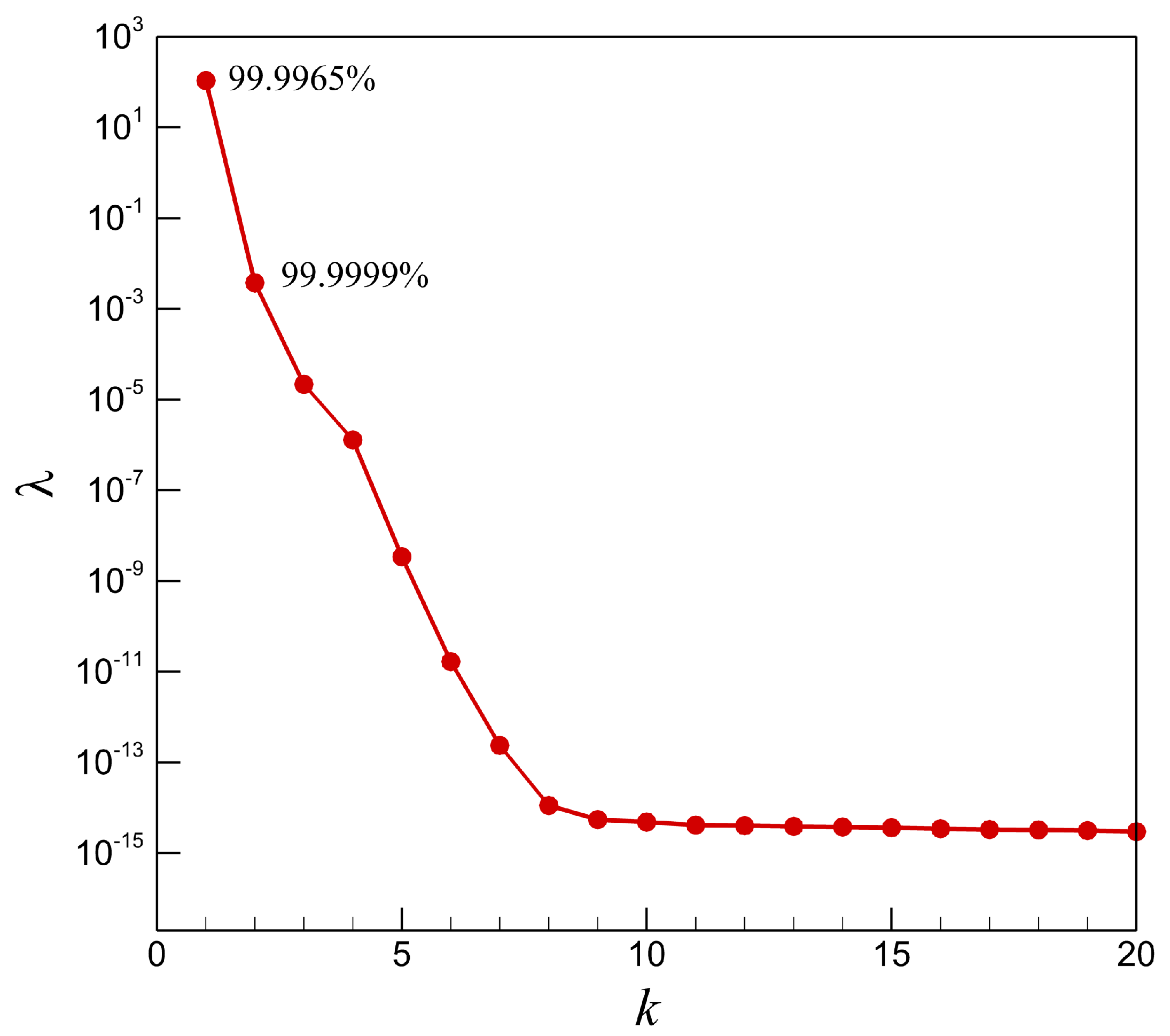
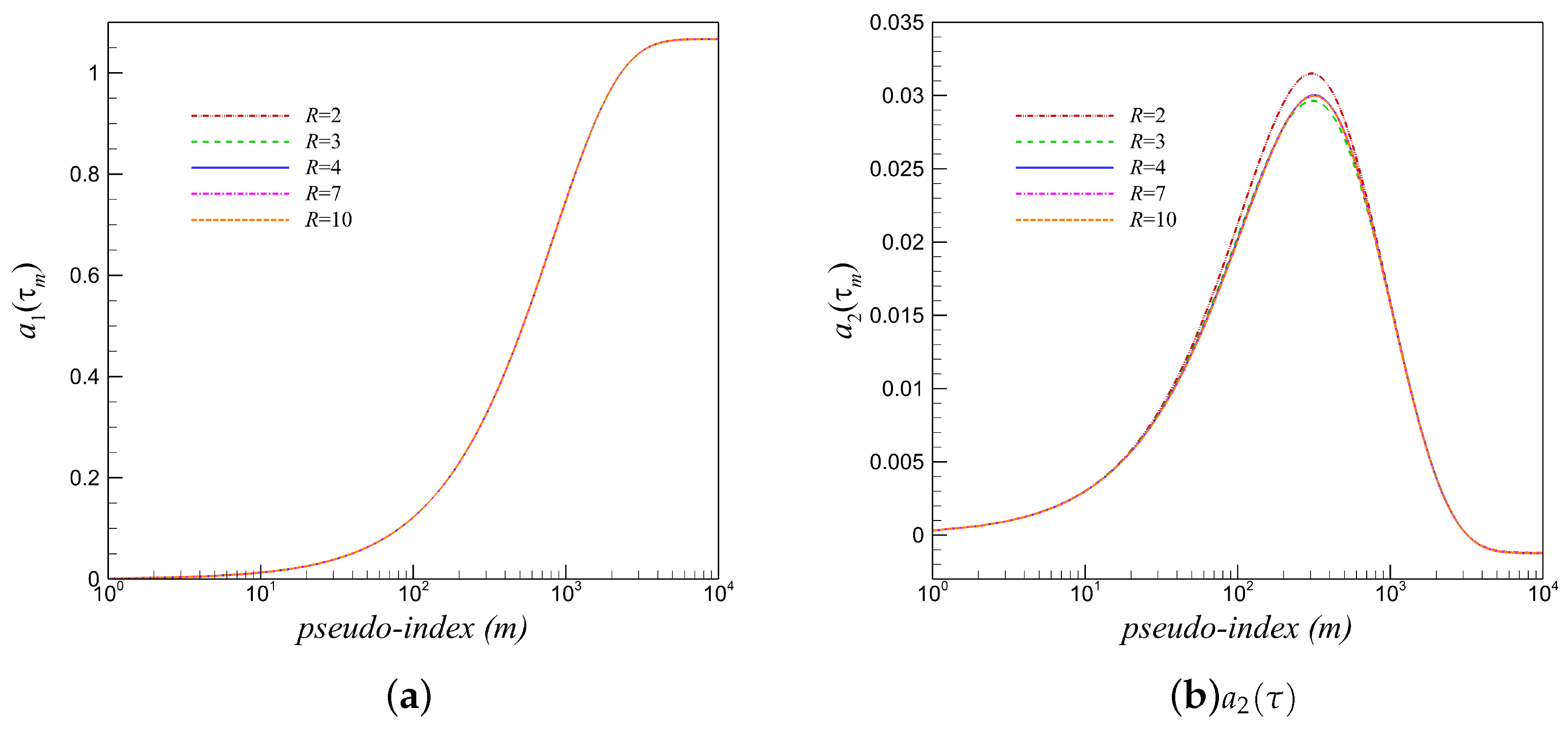
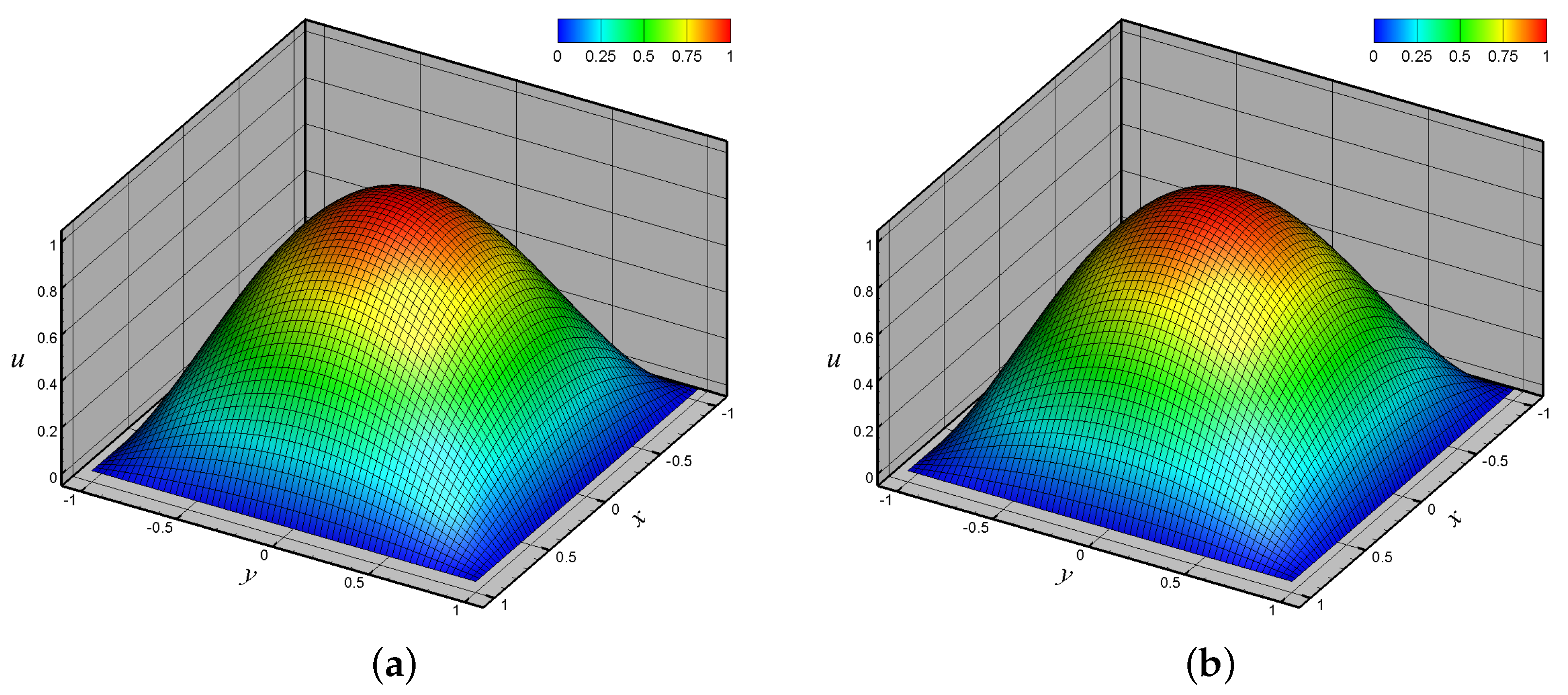
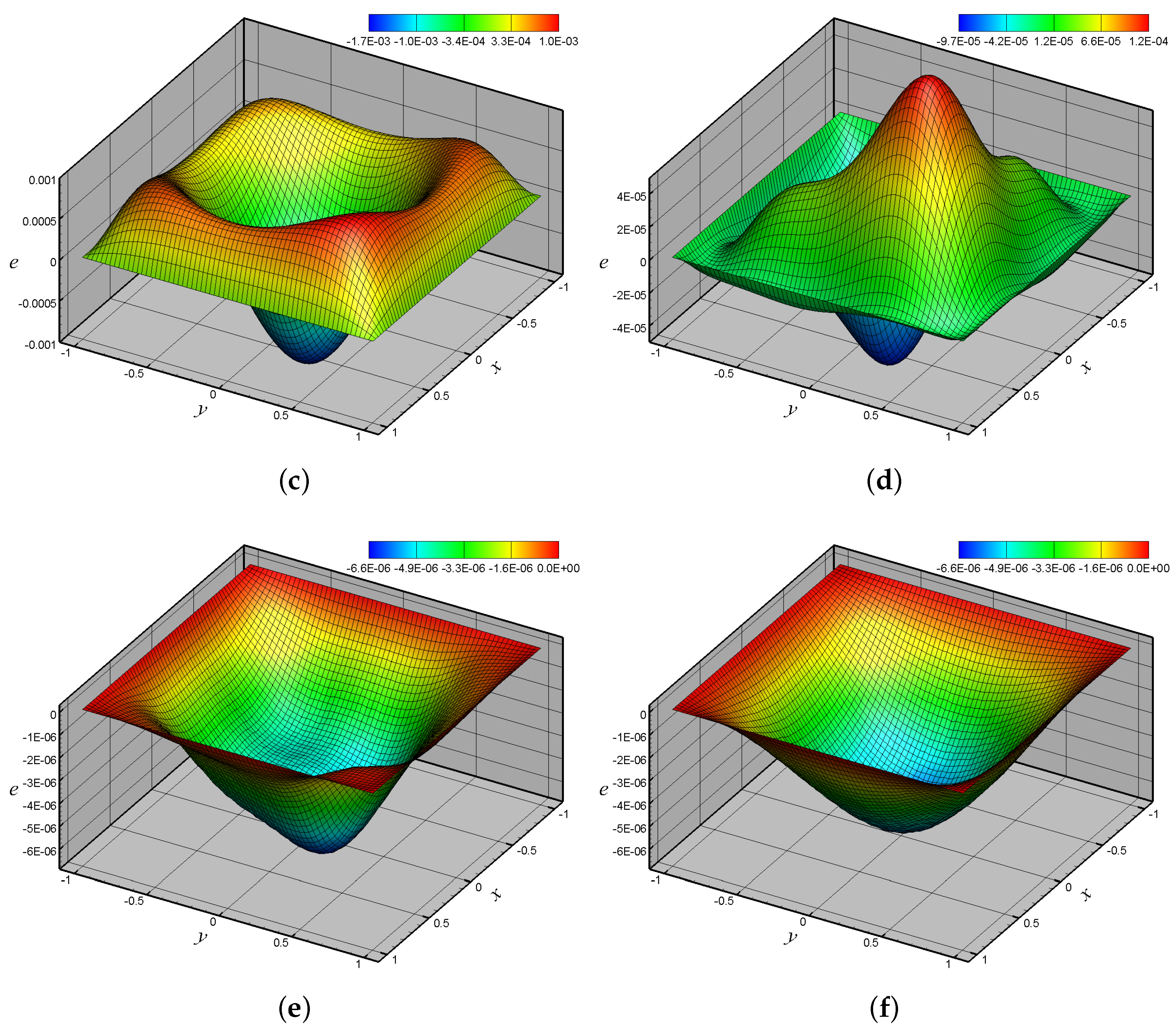
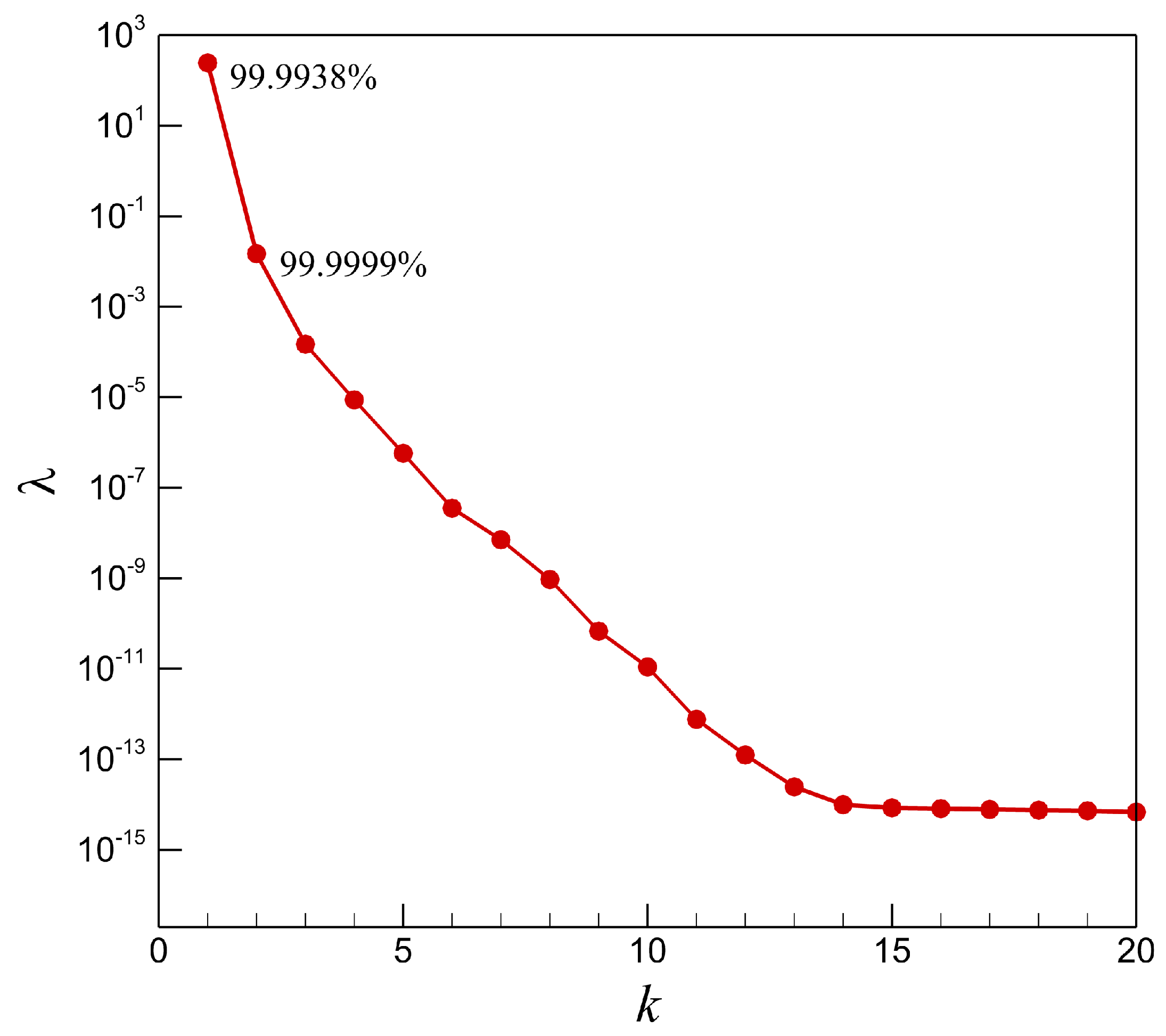
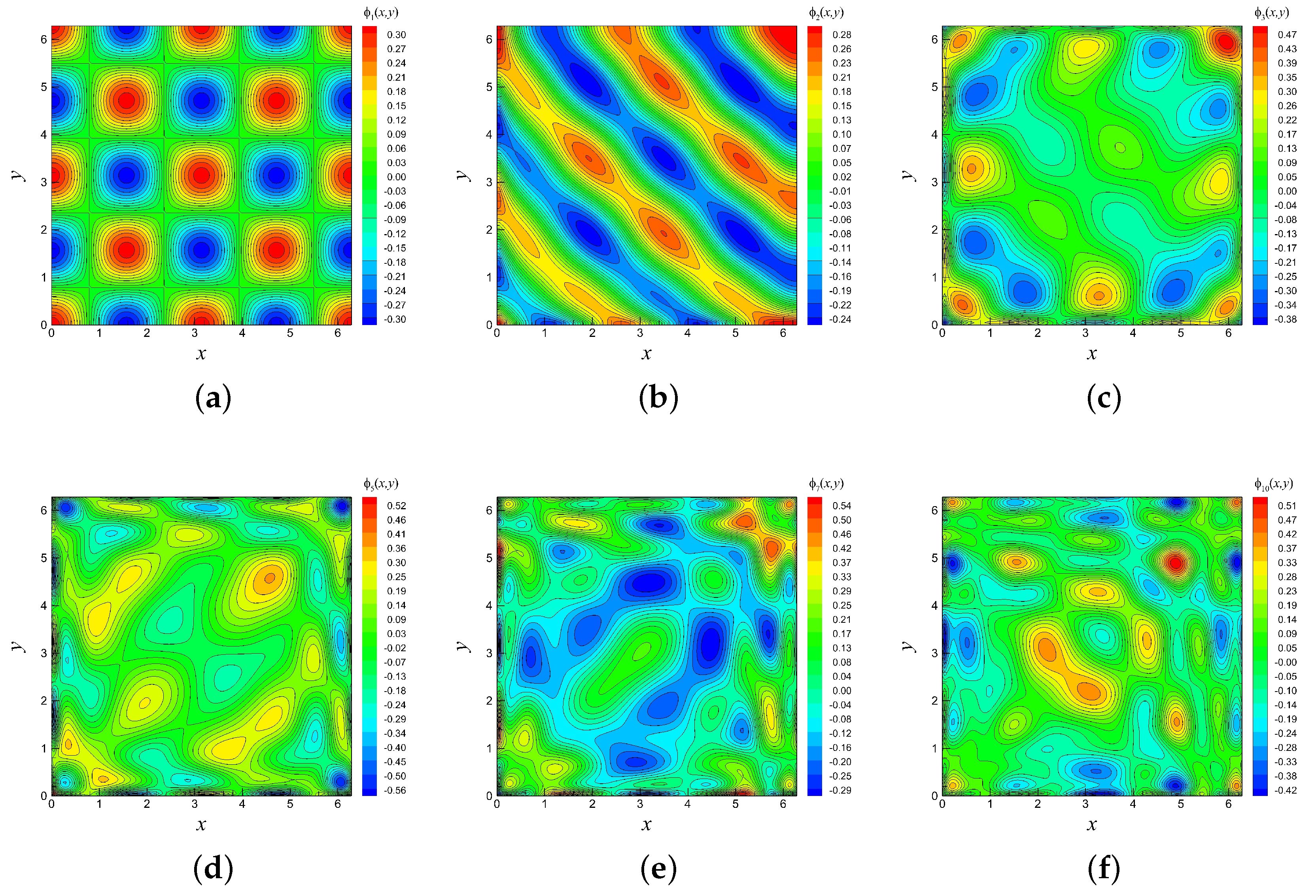
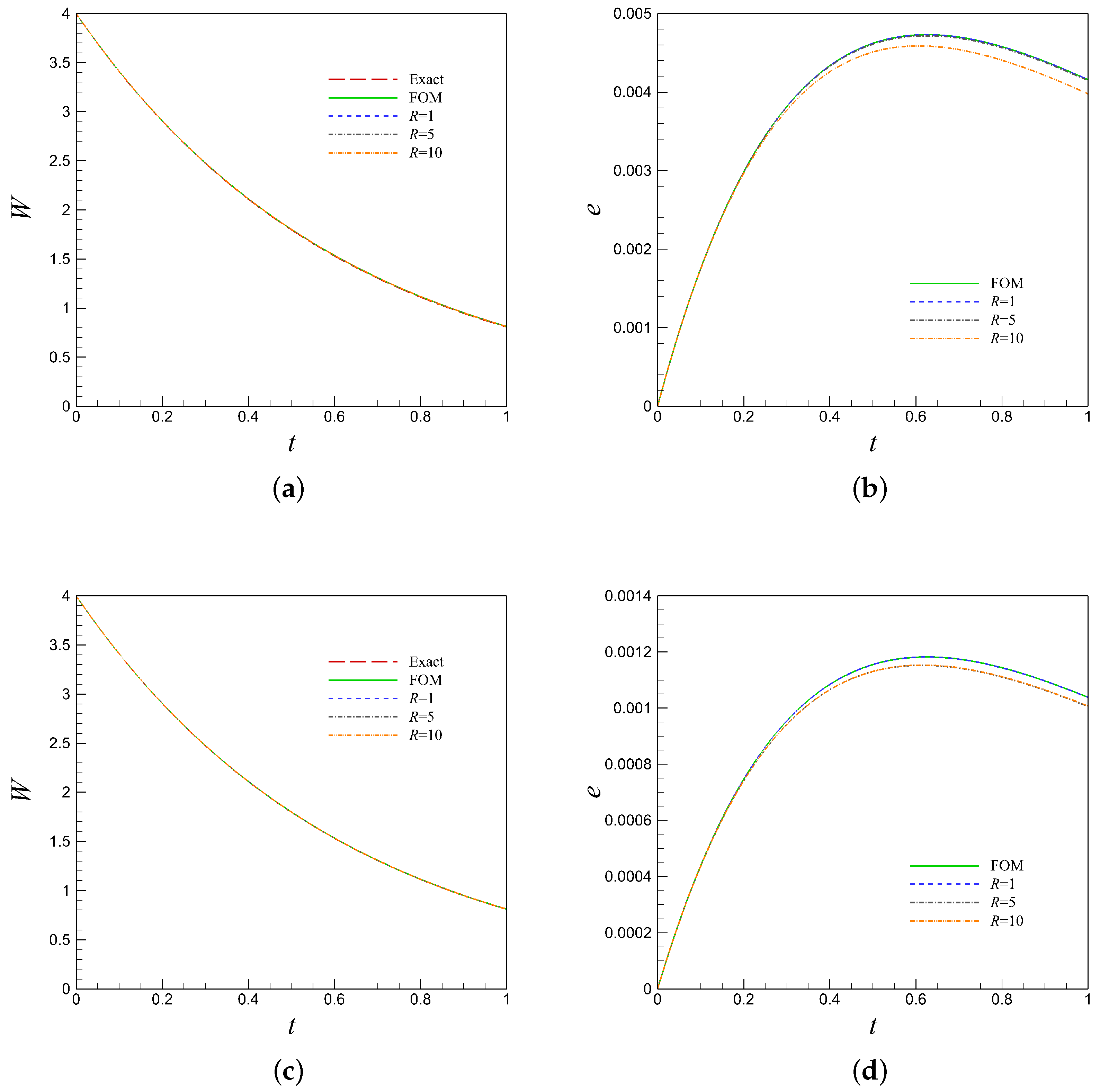
4.1. Reduced Order Modeling Results for a Canonical Elliptic Problem
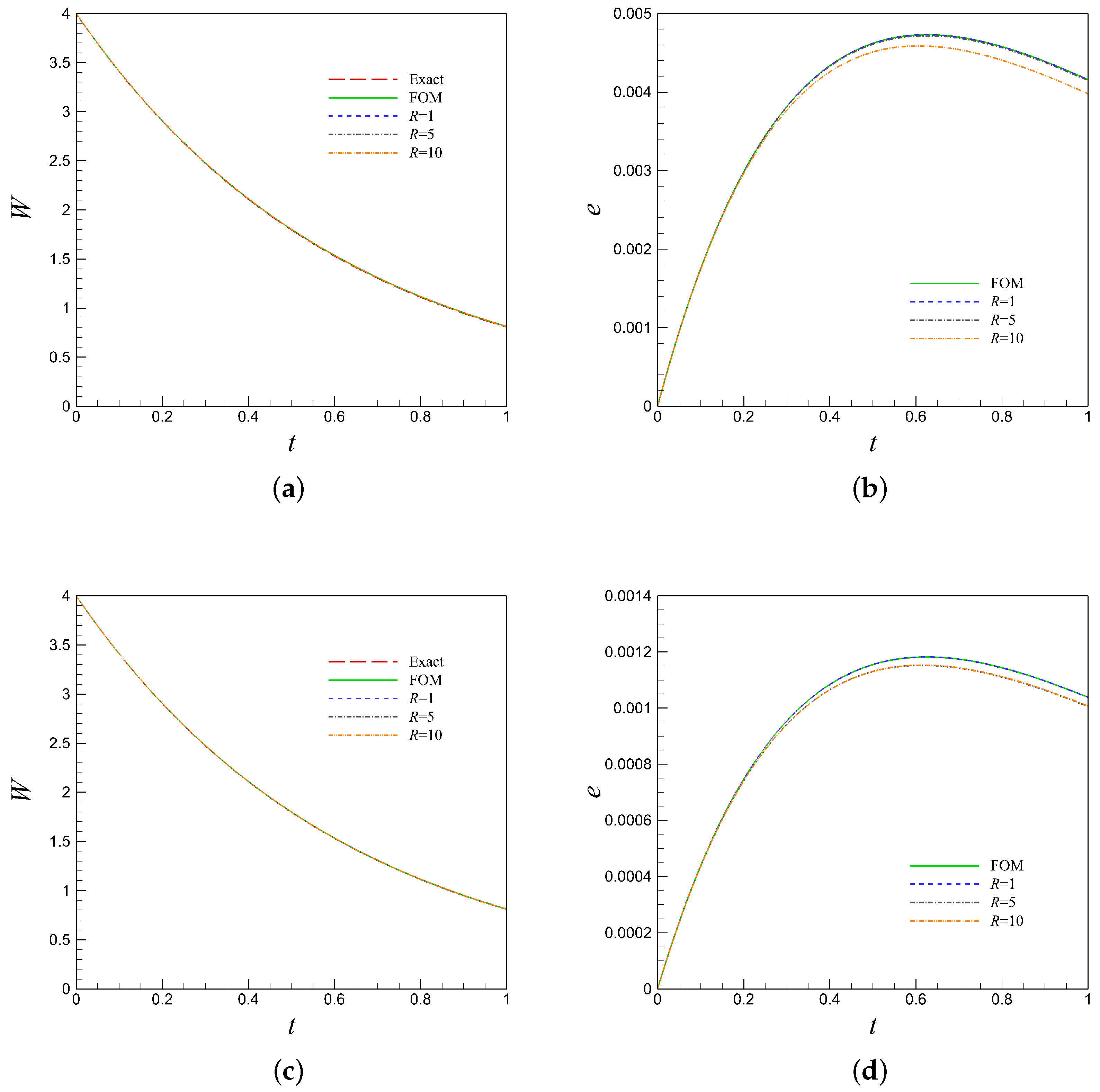
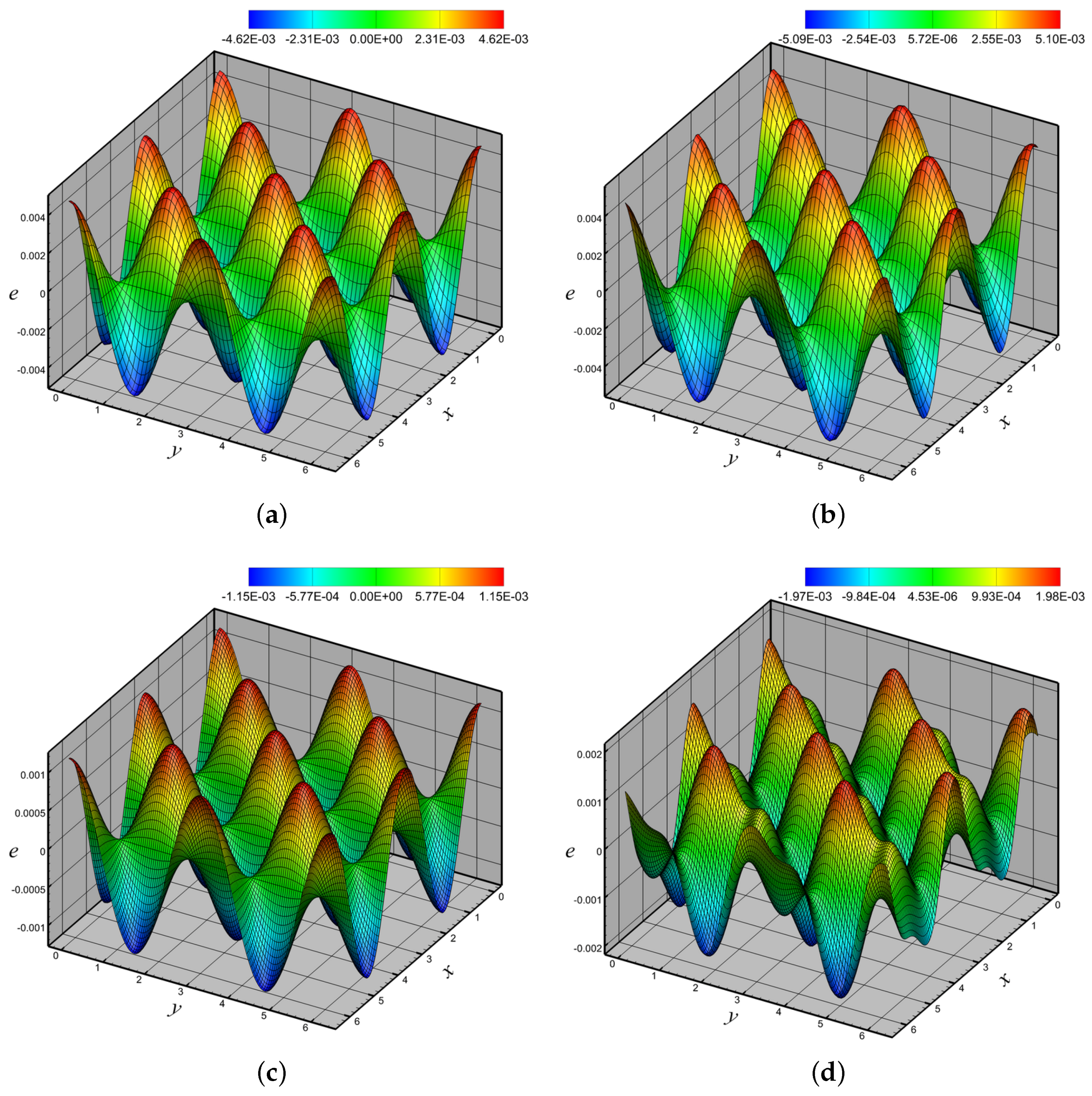
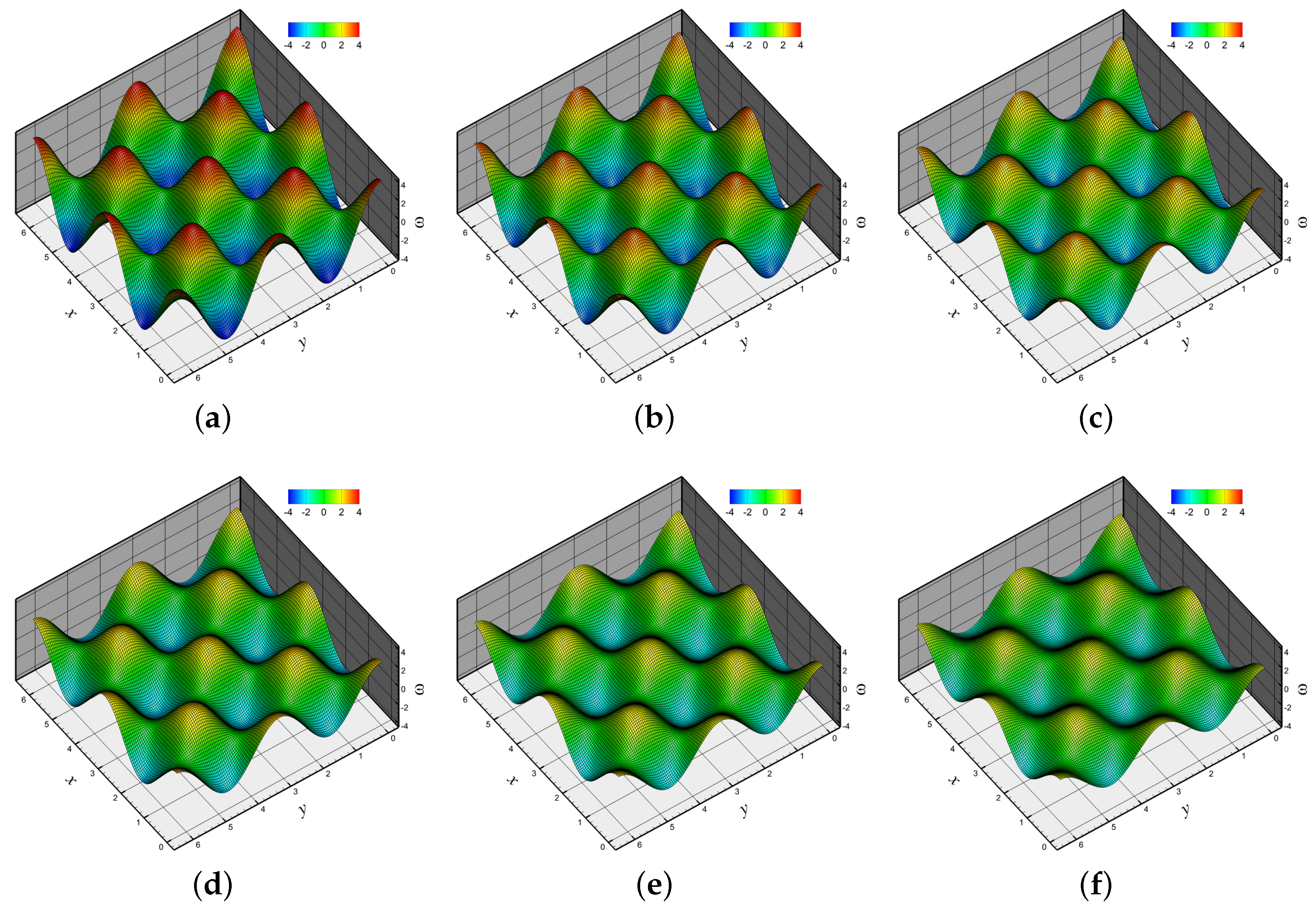
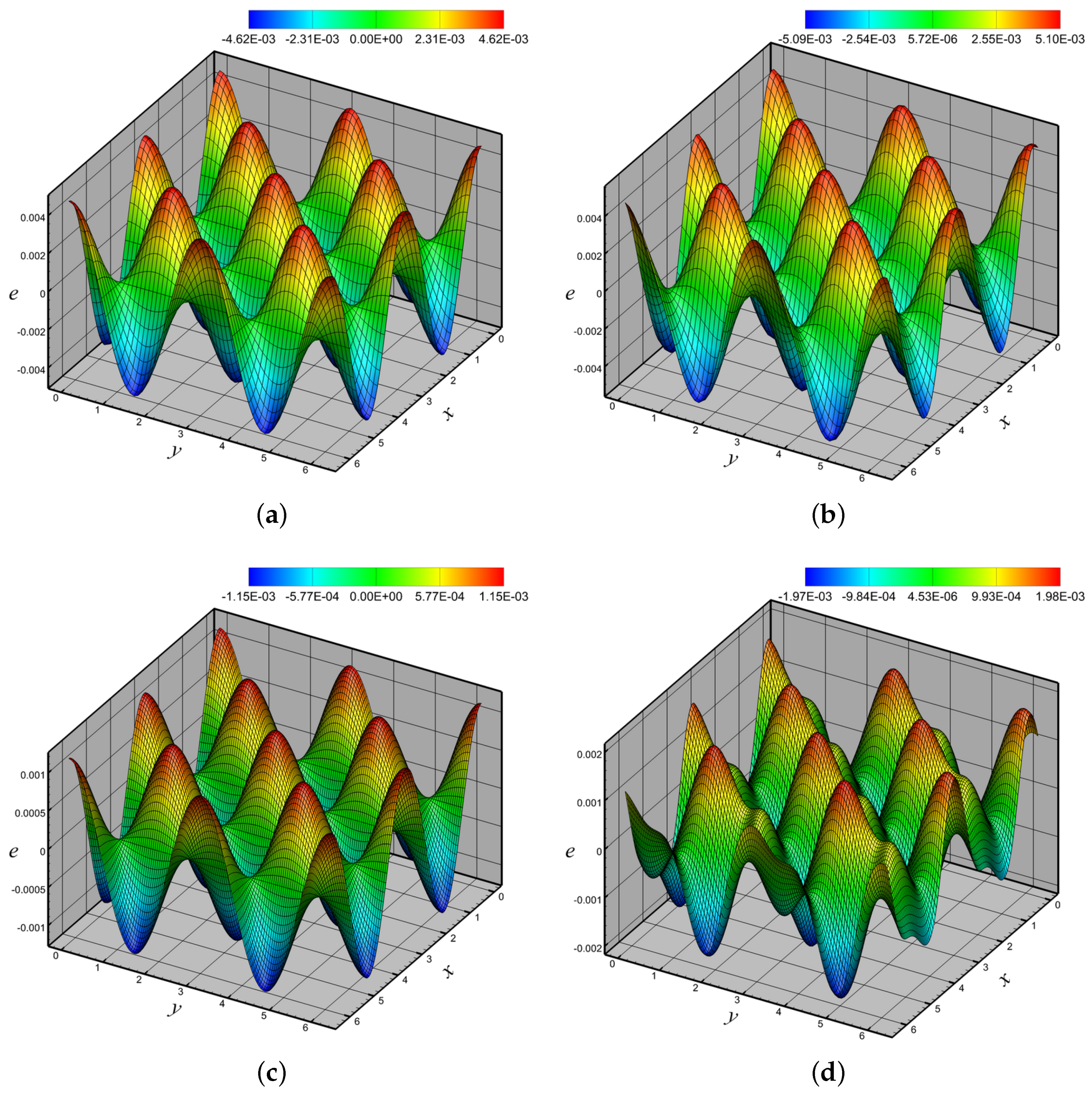
4.2. Hybrid Analytics Results for the Taylor–Green Vortex Decaying Problem
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Grieves, M. Virtually Perfect: Driving Innovative and Lean Products Through Product Lifecycle Management; Space Coast Press: Cocoa Beach, FL, USA, 2011. [Google Scholar]
- Colagrossi, A.; Landrini, M. Numerical simulation of interfacial flows by smoothed particle hydrodynamics. J. Comput. Phys. 2003, 191, 448–475. [Google Scholar] [CrossRef]
- Monaghan, J.J. Simulating free surface flows with SPH. J. Comput. Phys. 1994, 110, 399–406. [Google Scholar] [CrossRef]
- Magyari, E.; Keller, B. Heat and mass transfer in the boundary layers on an exponentially stretching continuous surface. J. Phys. D Appl. Phys. 1999, 32, 577. [Google Scholar] [CrossRef]
- Ramamurti, R.; Sandberg, W. Simulation of flow about flapping airfoils using finite element incompressible flow solver. AIAA J. 2001, 39, 253–260. [Google Scholar] [CrossRef]
- Cebral, J.R.; Yim, P.J.; Löhner, R.; Soto, O.; Choyke, P.L. Blood flow modeling in carotid arteries with computational fluid dynamics and MR imaging. Acad. Radiol. 2002, 9, 1286–1299. [Google Scholar] [CrossRef]
- Panton, R.L. Incompressible Flow. John Wiley & Sons: New York, NY, USA, 2006. [Google Scholar]
- Chorin, A.J. A numerical method for solving incompressible viscous flow problems. J. Comput. Phys. 1967, 2, 12–26. [Google Scholar] [CrossRef]
- Hafez, M.M. Numerical Simulations of Incompressible Flows; World Scientific: Danvers, MA, USA, 2003. [Google Scholar]
- Quartapelle, L. Numerical Solution of the Incompressible Navier–Stokes Equations; Birkhäuser: Basel, Switzerland, 2013; Volume 113. [Google Scholar]
- Mateescu, D.; Paıdoussis, M.; Bélanger, F. A time-integration method using artificial compressibility for unsteady viscous flows. J. Sound Vib. 1994, 177, 197–205. [Google Scholar] [CrossRef]
- Tang, H.; Sotiropoulos, F. Fractional step artificial compressibility schemes for the unsteady incompressible Navier–Stokes equations. Comput. Fluids 2007, 36, 974–986. [Google Scholar] [CrossRef]
- Kwak, D.; Kiris, C.; Kim, C.S. Computational challenges of viscous incompressible flows. Comput. Fluids 2005, 34, 283–299. [Google Scholar] [CrossRef] [Green Version]
- Brown, D.L. Accuracy of projection methods for the incompressible Navier–Stokes equations. In Numerical Simulations of Incompressible Flows; World Scientific: Danvers, MA, USA, 2003; pp. 101–107. [Google Scholar]
- San, O. A novel high-order accurate compact stencil Poisson solver: Application to cavity flows. Int. J. Appl. Mech. 2015, 7, 1550006. [Google Scholar] [CrossRef]
- Tezduyar, T.; Liou, J.; Ganjoo, D.; Behr, M. Solution techniques for the vorticity–streamfunction formulation of two-dimensional unsteady incompressible flows. Int. J. Numer. Meth. Fluids 1990, 11, 515–539. [Google Scholar] [CrossRef]
- Arakawa, A. Computational design for long-term numerical integration of the equations of fluid motion: Two-dimensional incompressible flow. Part I. J. Comput. Phys. 1966, 1, 119–143. [Google Scholar] [CrossRef]
- Wilson, R.V.; Demuren, A.O.; Carpenter, M. Higher-order compact schemes for numerical simulation of incompressible flows. Ins. Comput. Appl. Sci. Eng. 1998, 98-13, 1–41. [Google Scholar]
- Ferziger, J.H.; Peric, M. Computational Methods for Fluid Dynamics; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Babaee, H.; Acharya, S. A hybrid staggered/semistaggered finite-difference algorithm for solving time-dependent incompressible Navier–Stokes equations on curvilinear grids. Numer. Heat Trans. Part B Fundam. 2014, 65, 1–26. [Google Scholar] [CrossRef]
- Dormy, E. An accurate compact treatment of pressure for colocated variables. J. Comput. Phys. 1999, 151, 676–683. [Google Scholar] [CrossRef]
- Rhie, C.; Chow, W.L. Numerical study of the turbulent flow past an airfoil with trailing edge separation. AIAA J. 1983, 21, 1525–1532. [Google Scholar] [CrossRef]
- Lin, P. A sequential regularization method for time-dependent incompressible Navier–Stokes equations. SIAM J. Numer. Anal. 1997, 34, 1051–1071. [Google Scholar] [CrossRef]
- Maday, Y.; Patera, A.T.; Rønquist, E.M. An operator-integration-factor splitting method for time-dependent problems: Application to incompressible fluid flow. J. Sci. Comput. 1990, 5, 263–292. [Google Scholar] [CrossRef]
- Ye, T.; Mittal, R.; Udaykumar, H.; Shyy, W. An accurate Cartesian grid method for viscous incompressible flows with complex immersed boundaries. J. Comput. Phys. 1999, 156, 209–240. [Google Scholar] [CrossRef]
- Zang, Y.; Street, R.L.; Koseff, J.R. A non-staggered grid, fractional step method for time-dependent incompressible Navier–Stokes equations in curvilinear coordinates. J. Comput. Phys. 1994, 114, 18–33. [Google Scholar] [CrossRef]
- Harlow, F.H.; Welch, J.E. Numerical calculation of time-dependent viscous incompressible flow of fluid with free surface. Phys. Fluids 1965, 8, 2182–2189. [Google Scholar] [CrossRef]
- Van Doormaal, J.; Raithby, G. Enhancements of the SIMPLE method for predicting incompressible fluid flows. Numer. Heat Trans. 1984, 7, 147–163. [Google Scholar]
- Versteeg, H.; Malalasekera, W. An Introduction to Computational Fluid Dynamics: The Finite Volume Method; John Wiley & Sons: New York, NY, USA, 1995. [Google Scholar]
- Daescu, D.; Navon, I. A dual-weighted approach to order reduction in 4DVAR data assimilation. Mon. Weather Rev. 2008, 136, 1026–1041. [Google Scholar] [CrossRef]
- Taira, K.; Brunton, S.L.; Dawson, S.T.; Rowley, C.W.; Colonius, T.; McKeon, B.J.; Schmidt, O.T.; Gordeyev, S.; Theofilis, V.; Ukeiley, L.S. Modal analysis of fluid flows: An overview. AIAA J. 2017, 55, 4013–4041. [Google Scholar] [CrossRef]
- Cao, Y.; Zhu, J.; Navon, I.M.; Luo, Z. A reduced-order approach to four-dimensional variational data assimilation using proper orthogonal decomposition. Int. J. Numer. Meth. Fluids 2007, 53, 1571–1583. [Google Scholar] [CrossRef]
- Borggaard, J.; Duggleby, A.; Hay, A.; Iliescu, T.; Wang, Z. Reduced-order modeling of turbulent flows. In Proceedings of the MTNS, Blacksburg, VA, USA, 28 July–1 August 2008. [Google Scholar]
- San, O.; Borggaard, J. Principal interval decomposition framework for POD reduced-order modeling of convective Boussinesq flows. Int. J. Numer. Meth. Fluids 2015, 78, 37–62. [Google Scholar] [CrossRef]
- Rowley, C.W.; Dawson, S.T. Model reduction for flow analysis and control. Ann. Rev. Fluid Mech. 2017, 49, 387–417. [Google Scholar] [CrossRef]
- Moosavi, A.; Stefanescu, R.; Sandu, A. Efficient construction of local parametric reduced order models using machine learning techniques. arXiv, 2015; arXiv:1511.02909. [Google Scholar]
- Gautier, N.; Aider, J.L.; Duriez, T.; Noack, B.; Segond, M.; Abel, M. Closed-loop separation control using machine learning. J. Fluid Mech. 2015, 770, 442–457. [Google Scholar] [CrossRef] [Green Version]
- Wan, Z.Y.; Vlachas, P.; Koumoutsakos, P.; Sapsis, T. Data-assisted reduced-order modeling of extreme events in complex dynamical systems. PLoS ONE 2018, 13, e0197704. [Google Scholar] [CrossRef] [PubMed]
- Mohan, A.T.; Gaitonde, D.V. A deep learning based approach to reduced order modeling for turbulent flow control using LSTM neural networks. arXiv, 2018; arXiv:1804.09269. [Google Scholar]
- San, O.; Maulik, R. Neural network closures for nonlinear model order reduction. Adv. Comput. Math. 2017. [Google Scholar] [CrossRef]
- San, O.; Maulik, R. Machine learning closures for model order reduction of thermal fluids. Appl. Math. Model. 2018, 60, 681–710. [Google Scholar] [CrossRef]
- Puligilla, S.C.; Jayaraman, B. Neural networks as globally optimal multilayer convolution architectures for learning fluid flows. arXiv, 2018; arXiv:1806.08234. [Google Scholar]
- Wang, Z.; Xiao, D.; Fang, F.; Govindan, R.; Pain, C.; Guo, Y. Model identification of reduced order fluid dynamics systems using deep learning. Int. J. Numer. Meth. Fluids 2018, 86, 255–268. [Google Scholar] [CrossRef]
- Holmes, P.; Lumley, J.L.; Berkooz, G.; Rowley, C.W. Turbulence, Coherent Structures, Dynamical Systems and Symmetry; Cambridge University Press: New York, NY, USA, 2012. [Google Scholar]
- Iollo, A.; Lanteri, S.; Désidéri, J.A. Stability properties of POD–Galerkin approximations for the compressible Navier–Stokes equations. Theor. Comput. Fluid Dyn. 2000, 13, 377–396. [Google Scholar] [CrossRef]
- San, O.; Iliescu, T. A stabilized proper orthogonal decomposition reduced-order model for large scale quasigeostrophic ocean circulation. Adv. Comput. Math. 2015, 41, 1289–1319. [Google Scholar] [CrossRef] [Green Version]
- Rowley, C.W.; Williams, D.R. Dynamics and control of high-Reynolds-number flow over open cavities. Ann. Rev. Fluid Mech. 2006, 38, 251–276. [Google Scholar] [CrossRef]
- Bui-Thanh, T.; Willcox, K.; Ghattas, O. Model reduction for large-scale systems with high-dimensional parametric input space. SIAM J. Sci. Comput. 2008, 30, 3270–3288. [Google Scholar] [CrossRef]
- Ito, K.; Ravindran, S. A reduced-order method for simulation and control of fluid flows. J. Comput. Phys. 1998, 143, 403–425. [Google Scholar] [CrossRef]
- Narasimha, R. Kosambi and proper orthogonal decomposition. Resonance 2011, 16, 574–581. [Google Scholar] [CrossRef]
- Jin, M.; Liu, W.; Chen, Q. Accelerating fast fluid dynamics with a coarse-grid projection scheme. HVAC R Res. 2014, 20, 932–943. [Google Scholar] [CrossRef]
- Lentine, M.; Zheng, W.; Fedkiw, R. A novel algorithm for incompressible flow using only a coarse grid projection. ACM Trans. Graph. 2010, 29, 114. [Google Scholar] [CrossRef]
- San, O.; Staples, A.E. A coarse-grid projection method for accelerating incompressible flow computations. J. Comput. Phys. 2013, 233, 480–508. [Google Scholar] [CrossRef]
- San, O.; Staples, A.E. An efficient coarse grid projection method for quasigeostrophic models of large-scale ocean circulation. Int. J. Multiscale Comput. Eng. 2013, 11, 463–495. [Google Scholar] [CrossRef]
- Kashefi, A.; Staples, A.E. A finite-element coarse-grid projection method for incompressible flow simulations. Adv. Comput. Math. 2017. [Google Scholar] [CrossRef]
- Wesseling, P. An Introduction to Multigrid Methods; John Wiley & Sons: Hoboken, NJ, USA, 1995. [Google Scholar]
- Filelis-Papadopoulos, C.K.; Gravvanis, G.A.; Lipitakis, E.A. On the numerical modeling of convection-diffusion problems by finite element multigrid preconditioning methods. Adv. Eng. Softw. 2014, 68, 56–69. [Google Scholar] [CrossRef]
- Reusken, A. Fourier analysis of a robust multigrid method for convection-diffusion equations. Numer. Math. 1995, 71, 365–397. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J. Fast and high accuracy multigrid solution of the three dimensional Poisson equation. J. Comput. Phys. 1998, 143, 449–461. [Google Scholar] [CrossRef]
- Drikakis, D.; Iliev, O.; Vassileva, D. Acceleration of multigrid flow computations through dynamic adaptation of the smoothing procedure. J. Comput. Phys. 2000, 165, 566–591. [Google Scholar] [CrossRef]
- Moin, P. Fundamentals of Engineering Numerical Analysis; Cambridge University Press: New York, NY, USA, 2010. [Google Scholar]
- Jacobsen, D.; Thibault, J.; Senocak, I. An MPI-CUDA implementation for massively parallel incompressible flow computations on multi-GPU clusters. In Proceedings of the 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2010; p. 522. [Google Scholar]
- Thibault, J.C.; Senocak, I. Accelerating incompressible flow computations with a Pthreads-CUDA implementation on small-footprint multi-GPU platforms. J. Supercomput. 2012, 59, 693–719. [Google Scholar] [CrossRef]
- Jobelin, M.; Lapuerta, C.; Latché, J.C.; Angot, P.; Piar, B. A finite element penalty–projection method for incompressible flows. J. Comput. Phys 2006, 217, 502–518. [Google Scholar] [CrossRef]
- Korczak, K.Z.; Patera, A.T. An isoparametric spectral element method for solution of the Navier–Stokes equations in complex geometry. J. Comput. Phys. 1986, 62, 361–382. [Google Scholar] [CrossRef]
- Guermond, J.L.; Minev, P.; Shen, J. Error analysis of pressure-correction schemes for the time-dependent Stokes equations with open boundary conditions. SIAM J. Numer. Anal. 2005, 43, 239–258. [Google Scholar] [CrossRef]
- Chorin, A.J. Numerical solution of the Navier–Stokes equations. Math. Comput. 1968, 22, 745–762. [Google Scholar] [CrossRef]
- Temam, R. Approximation of the solution of the Navier–Stokes equations by the fractional step method. Arch. Ration. Mech. Anal. 1969, 32, 135–153. [Google Scholar] [CrossRef]
- Kim, J.; Moin, P. Application of a fractional-step method to incompressible Navier–Stokes equations. J. Comput. Phys. 1985, 59, 308–323. [Google Scholar] [CrossRef]
- Tyliszczak, A. A high-order compact difference algorithm for half-staggered grids for laminar and turbulent incompressible flows. J. Comput. Phys. 2014, 276, 438–467. [Google Scholar] [CrossRef]
- San, O.; Staples, A.E. High-order methods for decaying two-dimensional homogeneous isotropic turbulence. Comput. Fluids 2012, 63, 105–127. [Google Scholar] [CrossRef] [Green Version]
- Gottlieb, S.; Shu, C.W. Total variation diminishing Runge-Kutta schemes. Math. Comput. Am. Math. Soc. 1998, 67, 73–85. [Google Scholar] [CrossRef] [Green Version]
- Shu, C.W.; Osher, S. Efficient implementation of essentially non-oscillatory shock-capturing schemes, II. In Upwind and High-Resolution Schemes; Springer: Heidelberg, Germany, 1989; pp. 328–374. [Google Scholar]
- Gottlieb, S.; Shu, C.W.; Tadmor, E. Strong stability-preserving high-order time discretization methods. SIAM Rev. 2001, 43, 89–112. [Google Scholar] [CrossRef]
- Zhang, K.K.; Shotorban, B.; Minkowycz, W.; Mashayek, F. A compact finite difference method on staggered grid for Navier–Stokes flows. Int. J. Numer. Meth. Fluids 2006, 52, 867–881. [Google Scholar] [CrossRef]
- Sirovich, L. Turbulence and the dynamics of coherent structures. I. Coherent structures. Q. Appl. Math. 1987, 45, 561–571. [Google Scholar] [CrossRef] [Green Version]
- Leblond, C.; Allery, C.; Inard, C. An optimal projection method for the reduced-order modeling of incompressible flows. Comput. Meth. Appl. Mech. Eng. 2011, 200, 2507–2527. [Google Scholar] [CrossRef]
- Ravindran, S.S. A reduced-order approach for optimal control of fluids using proper orthogonal decomposition. Int. J. Numer. Meth. Fluids 2000, 34, 425–448. [Google Scholar] [CrossRef]
- Rapún, M.L.; Vega, J.M. Reduced order models based on local POD plus Galerkin projection. J. Comput. Phys. 2010, 229, 3046–3063. [Google Scholar] [CrossRef] [Green Version]
- Sirisup, S.; Karniadakis, G. Stability and accuracy of periodic flow solutions obtained by a POD-penalty method. Phys. D Nonlinear Phenom. 2005, 202, 218–237. [Google Scholar] [CrossRef]
- Amsallem, D.; Farhat, C. Stabilization of projection-based reduced-order models. Int. J. Numer. Meth. Eng. 2012, 91, 358–377. [Google Scholar] [CrossRef]
- Bergmann, M.; Bruneau, C.H.; Iollo, A. Enablers for robust POD models. J. Comput. Phys. 2009, 228, 516–538. [Google Scholar] [CrossRef] [Green Version]
- Alonso, D.; Velazquez, A.; Vega, J. A method to generate computationally efficient reduced order models. Comput. Meth. Appl. Mech. Eng. 2009, 198, 2683–2691. [Google Scholar] [CrossRef] [Green Version]
- San, O.; Iliescu, T. Proper orthogonal decomposition closure models for fluid flows: Burgers equation. Int. J. Numer. Anal. Model. Ser. B 2014, 5, 217–237. [Google Scholar]
- Amsallem, D.; Farhat, C. On the stability of reduced-order linearized computational fluid dynamics models based on POD and Galerkin projection: Descriptor vs. non-descriptor forms. In Reduced Order Methods for Modeling and Computational Reduction; Springer: New York, NY, USA, 2014; pp. 215–233. [Google Scholar]
- Xie, X.; Mohebujjaman, M.; Rebholz, L.; Iliescu, T. Data-driven filtered reduced order modeling of fluid flows. SIAM J. Sci. Comput. 2018, 40, 834–857. [Google Scholar] [CrossRef]
- Wang, Z.; Akhtar, I.; Borggaard, J.; Iliescu, T. Proper orthogonal decomposition closure models for turbulent flows: a numerical comparison. Comput. Meth. Appl. Mech. Eng. 2012, 237, 10–26. [Google Scholar] [CrossRef]
- Kalb, V.L.; Deane, A.E. An intrinsic stabilization scheme for proper orthogonal decomposition based low-dimensional models. Phys. Fluids 2007, 19, 054106. [Google Scholar] [CrossRef]
- Hoffman, J.D. Numerical Methods for Engineers and Scientists; Marcel Dekker, Inc.: New York, NY, USA, 2001. [Google Scholar]
- Drikakis, D.; Fureby, C.; Grinstein, F.F.; Youngs, D. Simulation of transition and turbulence decay in the Taylor–Green vortex. J. Turbul. 2007, 8, N20. [Google Scholar] [CrossRef]
- Moser, R.D.; Kim, J.; Mansour, N.N. Direct numerical simulation of turbulent channel flow up to Re τ = 590. Phys. Fluids 1999, 11, 943–945. [Google Scholar] [CrossRef]
- Rana, Z.A.; Thornber, B.; Drikakis, D. Transverse jet injection into a supersonic turbulent cross-flow. Phys. Fluids 2011, 23, 046103. [Google Scholar] [CrossRef]
- Drikakis, D. Advances in turbulent flow computations using high-resolution methods. Prog. Aeros. Sci. 2003, 39, 405–424. [Google Scholar] [CrossRef] [Green Version]
- Bachant, P.; Wosnik, M. Characterising the near-wake of a cross-flow turbine. J. Turbul. 2015, 16, 392–410. [Google Scholar] [CrossRef]
- Cordier, L.; Majd, E.; Abou, B.; Favier, J. Calibration of POD reduced-order models using Tikhonov regularization. Int. J. Numer. Meth. Fluids 2010, 63, 269–296. [Google Scholar] [CrossRef] [Green Version]
- Gloerfelt, X. Compressible POD/Galerkin reduced-order model of self-sustained oscillations in a cavity. In Proceedings of the 12th AIAA/CEAS Aeroacoustics Conference (27th AIAA Aeroacoustics Conference), Cambridge, MA, USA, 8–10 May 2006; p. 2432. [Google Scholar]
- Shu, C.W.; Don, W.S.; Gottlieb, D.; Schilling, O.; Jameson, L. Numerical convergence study of nearly incompressible, inviscid Taylor–Green vortex flow. J. Sci. Comput. 2005, 24, 1–27. [Google Scholar] [CrossRef]
- Cox, C.; Liang, C.; Plesniak, M.W. A flux reconstruction solver for unsteady incompressible viscous flow using artificial compressibility with implicit dual time stepping. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016; p. 1827. [Google Scholar]
- Morf, R.H.; Orszag, S.A.; Frisch, U. Spontaneous singularity in three-dimensional inviscid, incompressible flow. Phys. Rev. Lett. 1980, 44, 572. [Google Scholar] [CrossRef]
- Orszag, S.A. Numerical simulation of incompressible flows within simple boundaries: Accuracy. J. Fluid Mech. 1971, 49, 75–112. [Google Scholar] [CrossRef]
- Aubry, N.; Lian, W.Y.; Titi, E.S. Preserving symmetries in the proper orthogonal decomposition. SIAM J. Sci. Comput. 1993, 14, 483–505. [Google Scholar] [CrossRef]
- Milano, M.; Koumoutsakos, P. Neural network modeling for near wall turbulent flow. J. Comput. Phys. 2002, 182, 1–26. [Google Scholar] [CrossRef]
- Weymouth, G.D.; Yue, D.K. Physics-based learning models for ship hydrodynamics. J. Ship Res. 2013, 57, 1–12. [Google Scholar] [CrossRef]
- Bai, Z.; Brunton, S.L.; Brunton, B.W.; Kutz, J.N.; Kaiser, E.; Spohn, A.; Noack, B.R. Data-driven methods in fluid dynamics: Sparse classification from experimental data. In Whither Turbulence and Big Data in the 21st Century? Springer: New York, NY, USA, 2017; pp. 323–342. [Google Scholar]
- Wang, J.X.; Wu, J.L.; Xiao, H. Physics-informed machine learning approach for reconstructing Reynolds stress modeling discrepancies based on DNS data. Phys. Rev. Fluids 2017, 2, 034603. [Google Scholar] [CrossRef]
- Beck, A.D.; Flad, D.G.; Munz, C.D. Neural networks for data-based turbulence models. arXiv, 2018; arXiv:1806.04482. [Google Scholar]
- Berger, J.; Mazuroski, W.; Oliveira, R.C.; Mendes, N. Intelligent co-simulation: Neural network vs. proper orthogonal decomposition applied to a 2D diffusive problem. J. Build. Perform. Simul. 2018. [Google Scholar] [CrossRef]
- San, O.; Maulik, R. Extreme learning machine for reduced order modeling of turbulent geophysical flows. Phys. Rev. E 2018, 97, 042322. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pathak, J.; Wikner, A.; Fussell, R.; Chandra, S.; Hunt, B.R.; Girvan, M.; Ott, E. Hybrid forecasting of chaotic processes: Using machine learning in conjunction with a knowledge-based model. Chaos 2018, 28, 041101. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Poisson Problem () | ||
|---|---|---|
| ROM Model | ||
| 1.69 × 10 | 6.32 × 10 | |
| 1.20 × 10 | 4.51 × 10 | |
| 3.43 × 10 | 1.21 × 10 | |
| 6.54 × 10 | 3.12 × 10 | |
| 6.26 × 10 | 3.10 × 10 | |
| 6.20 × 10 | 3.10 × 10 | |
| 6.19 × 10 | 3.10 × 10 | |
| TGV Problem at | ||||
|---|---|---|---|---|
| Model | CPU Time () | CPU Time () | ||
| FOM | 137.9375 s | 2.31 × 10 | 2156.2968 s | 5.77 × 10 |
| HA-ROM () | 1.0156 s | 2.42 × 10 | 4.0625 s | 8.39 × 10 |
| HA-ROM () | 1.6250 s | 1.05 × 10 | 6.2656 s | 5.70 × 10 |
| HA-ROM () | 2.2187 s | 1.20 × 10 | 8.7812 s | 5.38 × 10 |
| HA-ROM () | 3.1406 s | 1.65 × 10 | 13.2812 s | 6.27 × 10 |
| HA-ROM () | 5.2187 s | 5.08 × 10 | 15.8281 s | 6.01 × 10 |
| HA-ROM () | 12.3583 s | 1.64 × 10 | 45.9531 s | 4.68 × 10 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, S.M.; Rasheed, A.; San, O. A Hybrid Analytics Paradigm Combining Physics-Based Modeling and Data-Driven Modeling to Accelerate Incompressible Flow Solvers. Fluids 2018, 3, 50. https://doi.org/10.3390/fluids3030050
Rahman SM, Rasheed A, San O. A Hybrid Analytics Paradigm Combining Physics-Based Modeling and Data-Driven Modeling to Accelerate Incompressible Flow Solvers. Fluids. 2018; 3(3):50. https://doi.org/10.3390/fluids3030050
Chicago/Turabian StyleRahman, Sk. Mashfiqur, Adil Rasheed, and Omer San. 2018. "A Hybrid Analytics Paradigm Combining Physics-Based Modeling and Data-Driven Modeling to Accelerate Incompressible Flow Solvers" Fluids 3, no. 3: 50. https://doi.org/10.3390/fluids3030050
APA StyleRahman, S. M., Rasheed, A., & San, O. (2018). A Hybrid Analytics Paradigm Combining Physics-Based Modeling and Data-Driven Modeling to Accelerate Incompressible Flow Solvers. Fluids, 3(3), 50. https://doi.org/10.3390/fluids3030050