A Multi-Annotator Survey of Sub-km Craters on Mars

 , and
, and 
Abstract
1. Introduction
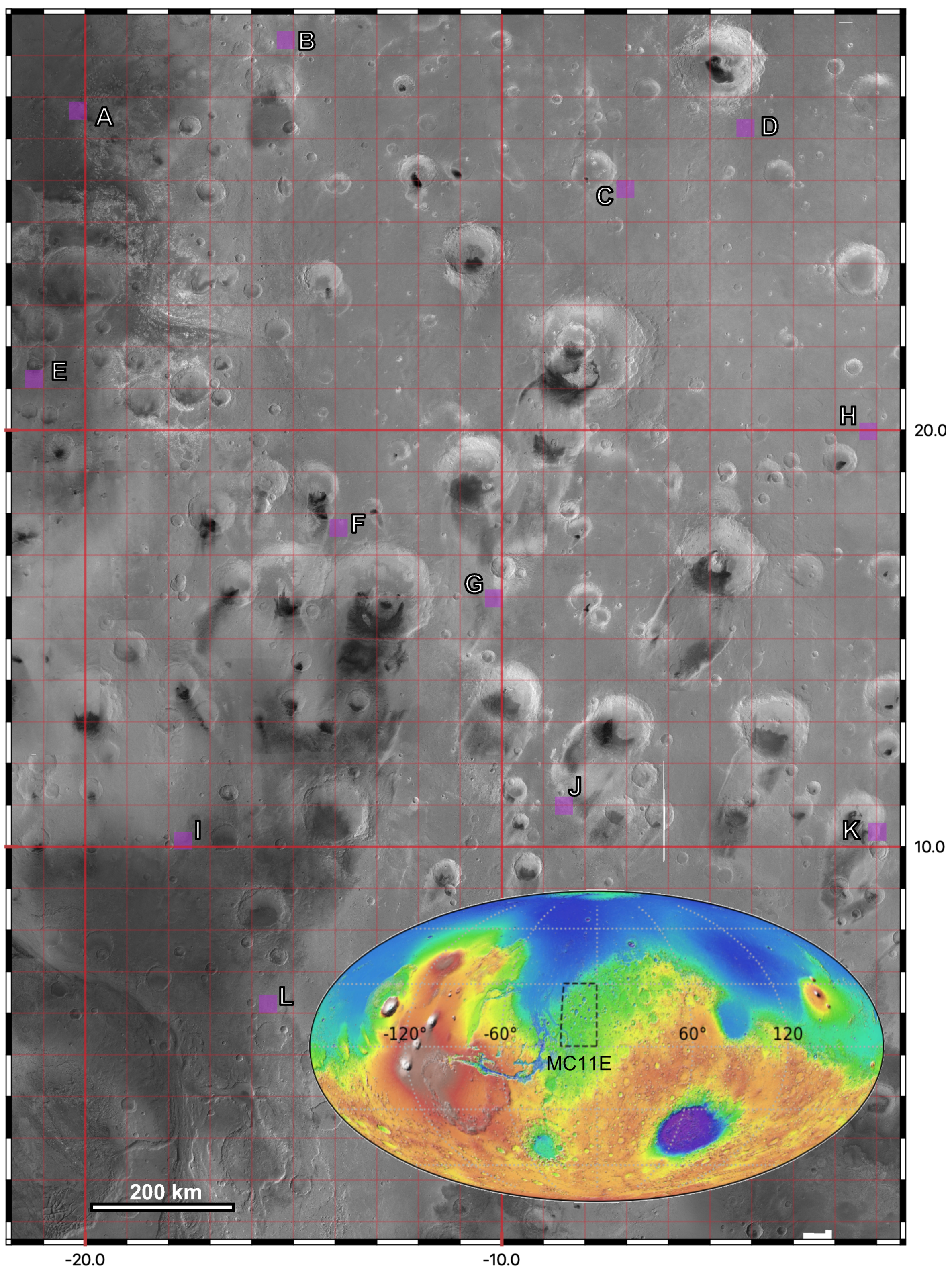
2. Data Description
| <annotation> <folder>data/images/</folder> <filename>MC11E–B.png</filename> <path>data/images/MC11E–B.png</path> <source> <database>MSSL ORBYTS MCC</database> <annotation>MSSL ORBYTS</annotation> <image>NASA CTX / iMars</image> </source> <size> <width>2000</width> <height>2000</height> <depth>1</depth> </size> <segmented>0</segmented> <object> <name>crater</name> <pose>Unspecified</pose> <truncated>0</truncated> <difficult>0</difficult> <bndbox> <xmin>232</xmin> <ymin>224</ymin> <xmax>260</xmax> <ymax>252</ymax> </bndbox> </object> <object> … |
3. Methods
3.1. Collection
3.2. Validation
- Let the ith label from annotator n be denoted as .
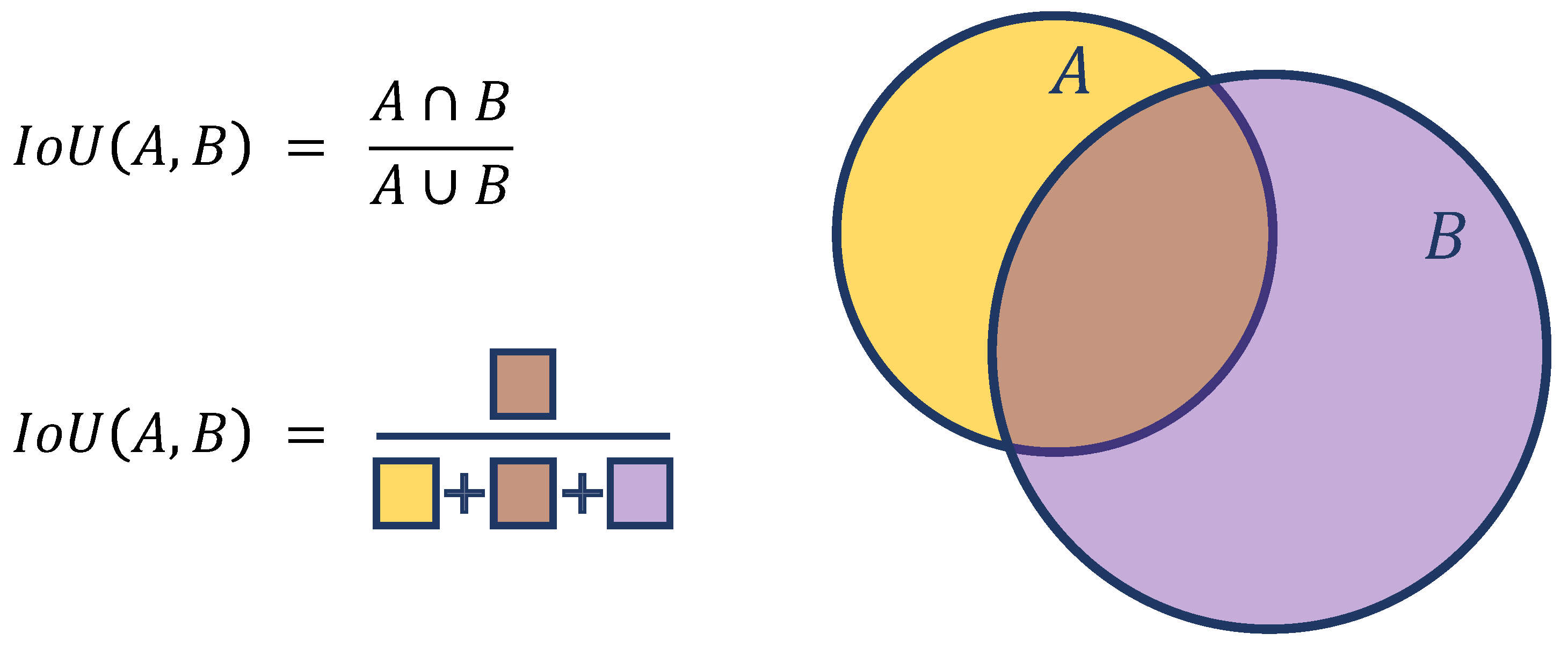
- For each made by annotator n, compute the intersection-over-union of it with all labels from all other annotators.
- Let the maximum of all these intersection-over-unions be . This is the highest intersection-over-union of one annotator’s label when compared to all other annotations from other annotators.
- Take the mean average of across i, to calculate the nth annotator’s Agreement Score.
4. Discussion
5. User Notes
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| CDA | Crater Detection Algorithm |
| CNN | Convolutional Neural Network |
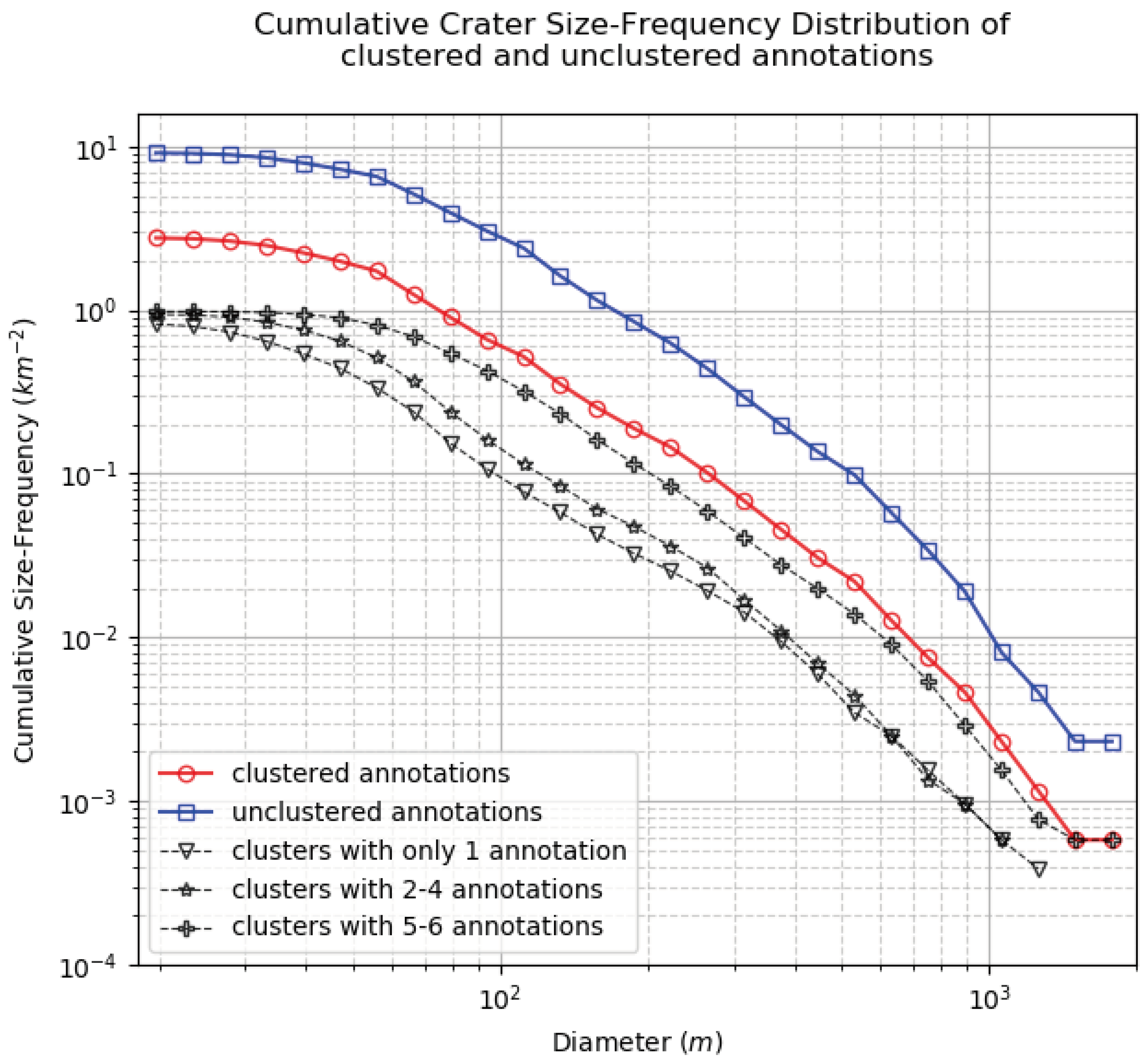
| CSFD | Crater Size-Frequency Distribution |
| CTX | ConTeXt camera |
| HRSC | High Resolution Stereo Camera |
| IoU | Intersection over Union |
| MC-11 | Mars Chart-11 |
| MIoU | Mean Intersection over Union |
| ORBYTS | Original Research By Young Twinkle Students |
| PASCAL VOC | Pattern Analysis, Statistical Modelling and Computational Learning - Visual Object Classes |
References
- Ivanov, B.; Neukum, G.; Wagner, R. Size-frequency distributions of planetary impact craters and asteroids. In Collisional Processes in the Solar System; Springer: Berlin/Heidelberg, Germany, 2001; pp. 1–34. [Google Scholar]
- Barlow, N.G. Crater size-frequency distributions and a revised Martian relative chronology. Icarus 1988, 75, 285–305. [Google Scholar] [CrossRef]
- Williams, J.P.; van der Bogert, C.H.; Pathare, A.V.; Michael, G.G.; Kirchoff, M.R.; Hiesinger, H. Dating very young planetary surfaces from crater statistics: A review of issues and challenges. Meteorit. Planet. Sci. 2018, 53, 554–582. [Google Scholar] [CrossRef]
- Robbins, S.J.; Hynek, B.M. The secondary crater population of Mars. Earth Planet. Sci. Lett. 2014, 400, 66–76. [Google Scholar] [CrossRef]
- McEwen, A.S.; Preblich, B.S.; Turtle, E.P.; Artemieva, N.A.; Golombek, M.P.; Hurst, M.; Kirk, R.L.; Burr, D.M.; Christensen, P.R. The rayed crater Zunil and interpretations of small impact craters on Mars. Icarus 2005, 176, 351–381. [Google Scholar] [CrossRef]
- Robbins, S.J.; Hynek, B.M. Secondary crater fields from 24 large primary craters on Mars: Insights into nearby secondary crater production. J. Geophys. Res. Planets 2011, 116, E10003. [Google Scholar] [CrossRef]
- Robbins, S.J.; Hynek, B.M. A new global database of Mars impact craters ≥ 1 km: 1. Database creation, properties, and parameters. J. Geophys. Res. Planets 2012, 117, E05004. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. In Advances in Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 2012; pp. 1097–1105. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Advances in Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 2015; pp. 91–99. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- DeLatte, D.M.; Crites, S.T.; Guttenberg, N.; Tasker, E.J.; Yairi, T. Segmentation Convolutional Neural Networks for Automatic Crater Detection on Mars. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2944–2957. [Google Scholar] [CrossRef]
- Lee, C. Automated crater detection on Mars using deep learning. Planet. Space Sci. 2019, 170, 16–28. [Google Scholar] [CrossRef]
- Urbach, E.R.; Stepinski, T.F. Automatic detection of sub-km craters in high resolution planetary images. Planet. Space Sci. 2009, 57, 880–887. [Google Scholar] [CrossRef]
- Cohen, J.P.; Lo, H.Z.; Lu, T.; Ding, W. Crater detection via convolutional neural networks. arXiv 2016, arXiv:1601.00978. [Google Scholar]
- Bandeira, L.; Ding, W.; Stepinski, T.F. Detection of sub-kilometer craters in high resolution planetary images using shape and texture features. Adv. Space Res. 2012, 49, 64–74. [Google Scholar] [CrossRef]
- Jaumann, R.; Neukum, G.; Behnke, T.; Duxbury, T.C.; Eichentopf, K.; Flohrer, J.; Gasselt, S.; Giese, B.; Gwinner, K.; Hauber, E.; et al. The high-resolution stereo camera (HRSC) experiment on Mars Express: Instrument aspects and experiment conduct from interplanetary cruise through the nominal mission. Planet. Space Sci. 2007, 55, 928–952. [Google Scholar] [CrossRef]
- Bugiolacchi, R.; Bamford, S.; Tar, P.; Thacker, N.; Crawford, I.A.; Joy, K.H.; Grindrod, P.M.; Lintott, C. The Moon Zoo citizen science project: Preliminary results for the Apollo 17 landing site. Icarus 2016, 271, 30–48. [Google Scholar] [CrossRef]
- Malin, M.C.; Bell, J.F.; Cantor, B.A.; Caplinger, M.A.; Calvin, W.M.; Clancy, R.T.; Edgett, K.S.; Edwards, L.; Haberle, R.M.; James, P.B.; et al. Context camera investigation on board the Mars Reconnaissance Orbiter. J. Geophys. Res. Planets 2007, 112. [Google Scholar] [CrossRef]
- Michael, G.; Walter, S.; Kneissl, T.; Zuschneid, W.; Gross, C.; McGuire, P.; Dumke, A.; Schreiner, B.; van Gasselt, S.; Gwinner, K.; et al. Systematic processing of Mars Express HRSC panchromatic and colour image mosaics: Image equalisation using an external brightness reference. Planet. Space Sci. 2016, 121, 18–26. [Google Scholar] [CrossRef]
- Sidiropoulos, P.; Muller, J.P.; Watson, G.; Michael, G.; Walter, S. Automatic coregistration and orthorectification (ACRO) and subsequent mosaicing of NASA high-resolution imagery over the Mars MC11 quadrangle, using HRSC as a baseline. Planet. Space Sci. 2018, 151, 33–42. [Google Scholar] [CrossRef]
- Gwinner, K.; Jaumann, R.; Hauber, E.; Hoffmann, H.; Heipke, C.; Oberst, J.; Neukum, G.; Ansan, V.; Bostelmann, J.; Dumke, A.; et al. The High Resolution Stereo Camera (HRSC) of Mars Express and its approach to science analysis and mapping for Mars and its satellites. Planet. Space Sci. 2016, 126, 93–138. [Google Scholar] [CrossRef]
- Zurek, R.W.; Smrekar, S.E. An overview of the Mars Reconnaissance Orbiter (MRO) science mission. J. Geophys. Res. Planets 2007, 112, E05S01. [Google Scholar] [CrossRef]
- Everingham, M.; Van Gool, L.; Williams, C.K.; Winn, J.; Zisserman, A. The pascal visual object classes (voc) challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef]
- Original research by Young twinkle students (ORBYTS): When can students start performing original research? Phys. Educ. 2017, 53. [CrossRef]
- McQuitty, L.L. Elementary linkage analysis for isolating orthogonal and oblique types and typal relevancies. Educ. Psychol. Meas. 1957, 17, 207–229. [Google Scholar] [CrossRef]
- Michael, G.; Neukum, G. Planetary surface dating from crater size–frequency distribution measurements: Partial resurfacing events and statistical age uncertainty. Earth Planet. Sci. Lett. 2010, 294, 223–229. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SCENE | Labels per Annotator | Agreement Score (%) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| i | ii | iii | iv | v | vi | TOTAL | i | ii | iii | iv | v | vi | MEAN | |
| A | 680 | 255 | 396 | 376 | 1111 | 413 | 3231 | 62.4 | 74.8 | 73.5 | 79 | 40.8 | 63.5 | 65.67 |
| B | 88 | 90 | 93 | 151 | 177 | 125 | 724 | 75.5 | 77.7 | 82.1 | 67.9 | 58.7 | 71.7 | 72.27 |
| C | 125 | 212 | 97 | 178 | 230 | 196 | 1038 | 82.6 | 69 | 78.6 | 74.6 | 68.9 | 75.4 | 74.85 |
| D | 72 | 43 | 32 | 94 | 73 | 85 | 399 | 75.7 | 77.1 | 82.3 | 63.9 | 75.7 | 62.9 | 72.93 |
| E | 277 | 503 | 690 | 778 | 869 | 837 | 3954 | 79.2 | 73 | 67.3 | 67.7 | 62.2 | 66.6 | 69.33 |
| F | 197 | 229 | 235 | 278 | 305 | 187 | 1431 | 75.1 | 74.7 | 80.6 | 69.7 | 65.3 | 80.4 | 74.3 |
| G | 45 | 22 | 45 | 45 | 60 | 51 | 268 | 74.9 | 83.2 | 80.0 | 79.5 | 66.2 | 75.7 | 76.58 |
| H | 24 | 36 | 43 | 37 | 40 | 43 | 223 | 86.5 | 78.6 | 74.8 | 83.7 | 72.3 | 77.6 | 78.91 |
| I | 147 | 135 | 174 | 209 | 183 | 262 | 1110 | 68.9 | 77.7 | 75.2 | 68.0 | 73.7 | 52.3 | 69.32 |
| J | 25 | 95 | 32 | 40 | 69 | 36 | 297 | 71.2 | 22.4 | 50.5 | 56.7 | 35.1 | 50.8 | 47.78 |
| K | 66 | 45 | 28 | 63 | 36 | 66 | 304 | 66.8 | 100 | 74.8 | 86.8 | 74.6 | 67.6 | 78.43 |
| L | 375 | 696 | 273 | 281 | 583 | 581 | 2789 | 74.1 | 46.4 | 71.7 | 73.9 | 63.6 | 47.1 | 62.78 |
| TOTAL | 15,768 | 70.26 | ||||||||||||
| Diameter (m) | |||||||
|---|---|---|---|---|---|---|---|
| SCENE | Valid Individual Annotations | Clustered Annotations | Average Annotations per Crater | Median | Mean | Min | Max |
| A | 3230 | 1182 | 2.73 | 60.0 | 66.9 | 18.0 | 366.0 |
| B | 724 | 196 | 3.69 | 108.0 | 136.0 | 36.0 | 918.0 |
| C | 1038 | 269 | 3.86 | 78.0 | 118.8 | 30.0 | 1188.0 |
| D | 397 | 112 | 3.54 | 66.0 | 106.4 | 24.0 | 1152.0 |
| E | 3946 | 1042 | 3.79 | 42.0 | 57.7 | 18.0 | 1938.0 |
| F | 1430 | 372 | 3.84 | 78.0 | 105.4 | 18.0 | 642.0 |
| G | 267 | 72 | 3.71 | 105.0 | 146.4 | 18.0 | 642.0 |
| H | 223 | 60 | 3.72 | 222.0 | 263.3 | 66.0 | 774.0 |
| I | 1110 | 325 | 3.42 | 72.0 | 93.2 | 24.0 | 552.0 |
| J | 297 | 168 | 1.77 | 54.0 | 83.1 | 18.0 | 798.0 |
| K | 304 | 81 | 3.75 | 90.0 | 118.2 | 24.0 | 672.0 |
| L | 2780 | 884 | 3.14 | 60.0 | 64.6 | 18.0 | 630.0 |
| TOTAL | 15,746 | 4763 | 3.31 | 60.0 | 81.1 | 18.0 | 1938.0 |
| No. of Annotations for Crater | No. of Craters | Mean Diameter (m) | Standard Deviation of Diameter (%) | Standard Deviation of Centre (m) |
|---|---|---|---|---|
| 1 | 1442 | 61.8 | - | - |
| 2 | 636 | 68.4 | 16.6 | 4.37 |
| 3 | 524 | 72.1 | 18.1 | 4.87 |
| 4 | 467 | 72.6 | 17.8 | 4.97 |
| 5 | 572 | 82.0 | 16.9 | 5.51 |
| 6 | 1122 | 120.5 | 13.8 | 5.49 |
| SCENE | Non-Expert Annotators | Expert Annotator | ||||||
|---|---|---|---|---|---|---|---|---|
| No. of Labels | Agreement Score (%) | No. of Labels | Agreement Score (%) | |||||
| Min | Max | Mean | Min | Max | Mean | |||
| D | 32 | 94 | 66.5 | 62.9 | 77.1 | 72.9 | 52 | 81.6 |
| F | 187 | 305 | 238.5 | 65.3 | 80.6 | 74.3 | 240 | 81.4 |
| K | 28 | 66 | 50.7 | 66.8 | 100 | 78.4 | 51 | 78.2 |
| L | 273 | 696 | 464.8 | 46.4 | 74.1 | 62.8 | 589 | 69.4 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Francis, A.; Brown, J.; Cameron, T.; Crawford Clarke, R.; Dodd, R.; Hurdle, J.; Neave, M.; Nowakowska, J.; Patel, V.; Puttock, A.; et al. A Multi-Annotator Survey of Sub-km Craters on Mars. Data 2020, 5, 70. https://doi.org/10.3390/data5030070
Francis A, Brown J, Cameron T, Crawford Clarke R, Dodd R, Hurdle J, Neave M, Nowakowska J, Patel V, Puttock A, et al. A Multi-Annotator Survey of Sub-km Craters on Mars. Data. 2020; 5(3):70. https://doi.org/10.3390/data5030070
Chicago/Turabian StyleFrancis, Alistair, Jonathan Brown, Thomas Cameron, Reuben Crawford Clarke, Romilly Dodd, Jennifer Hurdle, Matthew Neave, Jasmine Nowakowska, Viran Patel, Arianne Puttock, and et al. 2020. "A Multi-Annotator Survey of Sub-km Craters on Mars" Data 5, no. 3: 70. https://doi.org/10.3390/data5030070
APA StyleFrancis, A., Brown, J., Cameron, T., Crawford Clarke, R., Dodd, R., Hurdle, J., Neave, M., Nowakowska, J., Patel, V., Puttock, A., Redmond, O., Ruban, A., Ruban, D., Savage, M., Vermeer, W., Whelan, A., Sidiropoulos, P., & Muller, J.-P. (2020). A Multi-Annotator Survey of Sub-km Craters on Mars. Data, 5(3), 70. https://doi.org/10.3390/data5030070