Long-Term WiFi Fingerprinting Dataset for Research on Robust Indoor Positioning

 ,
,  ,
,  ,
,  and
and 
Abstract
:Abstract
Dataset
Dataset License

1. Introduction
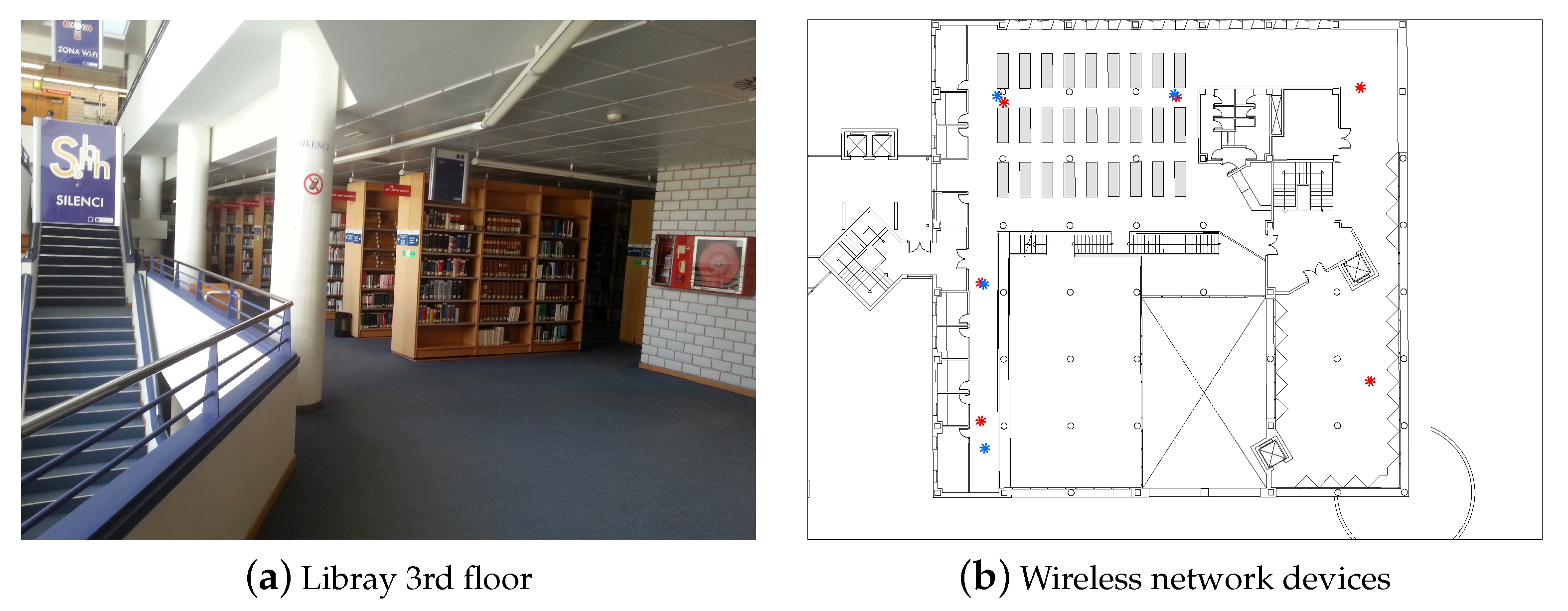
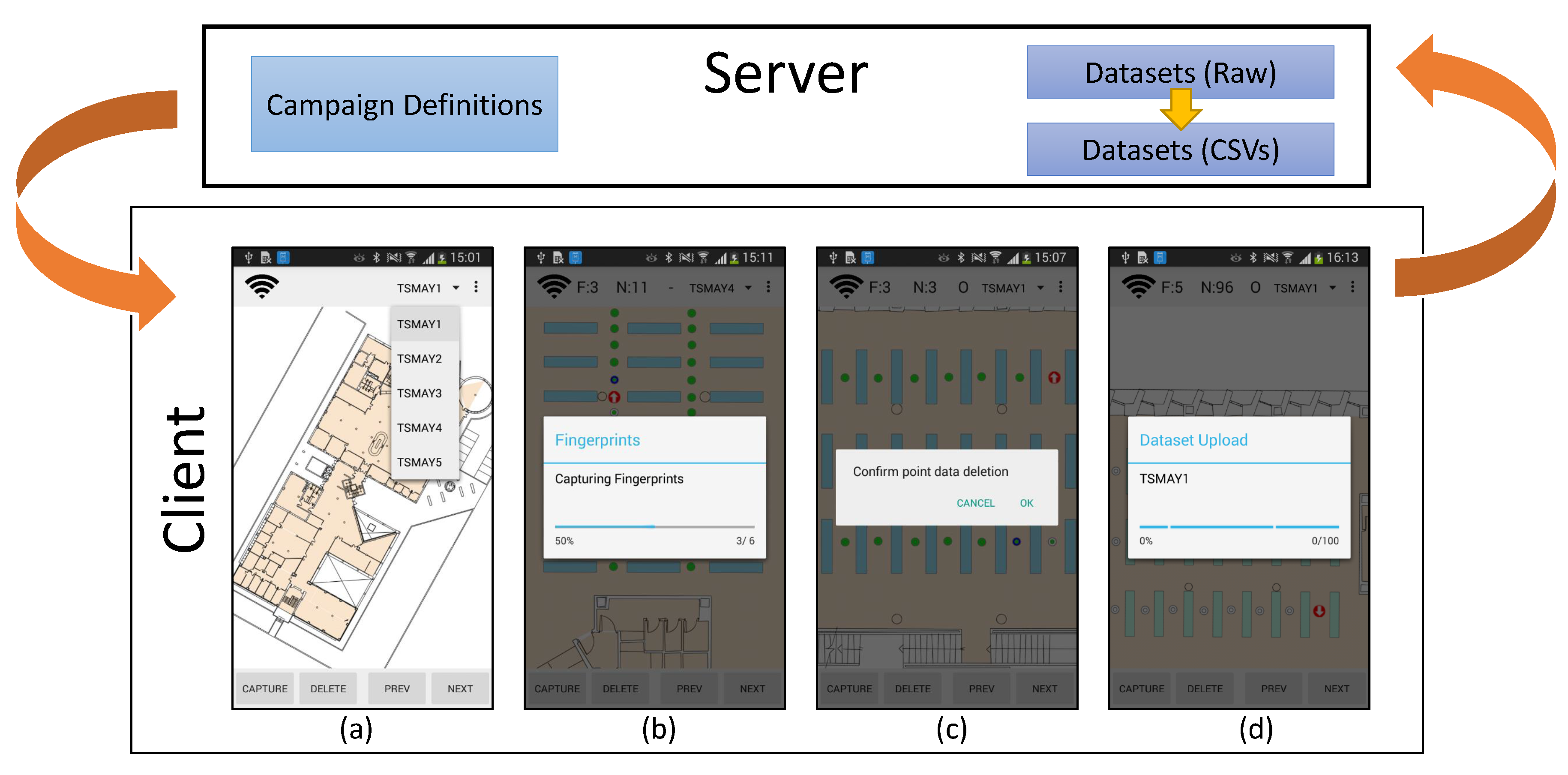
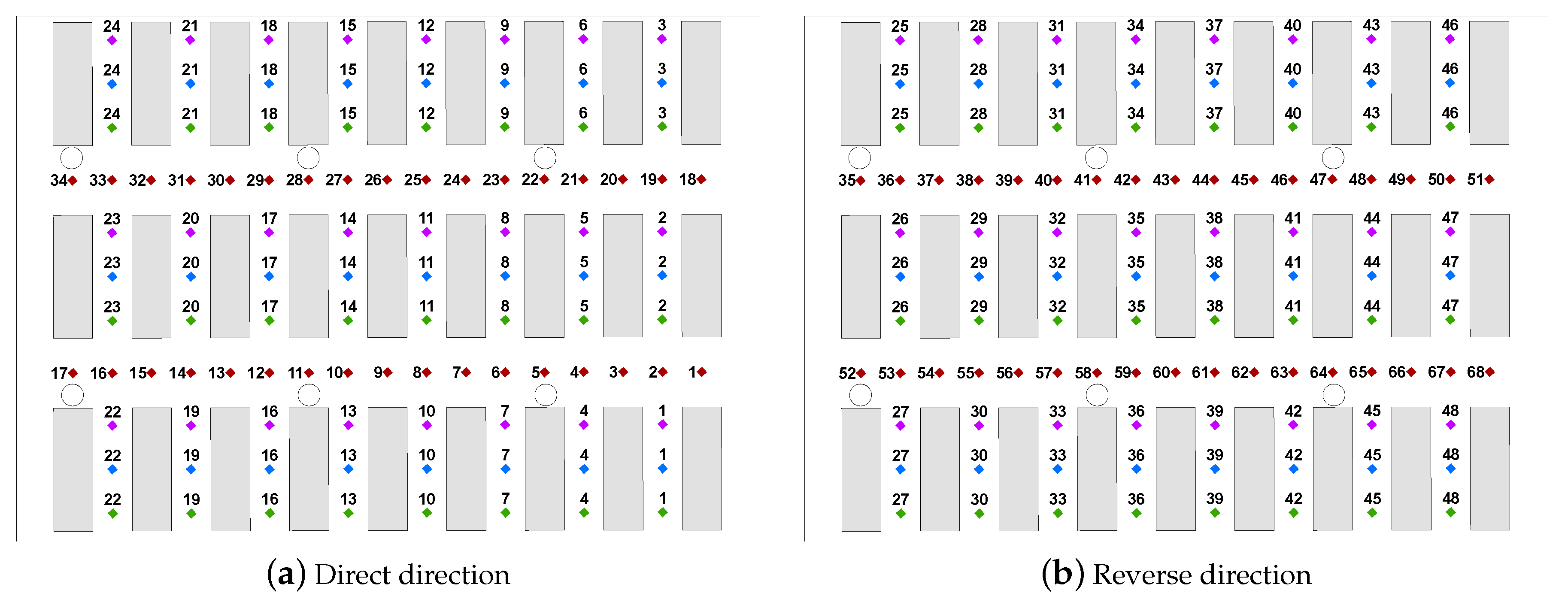
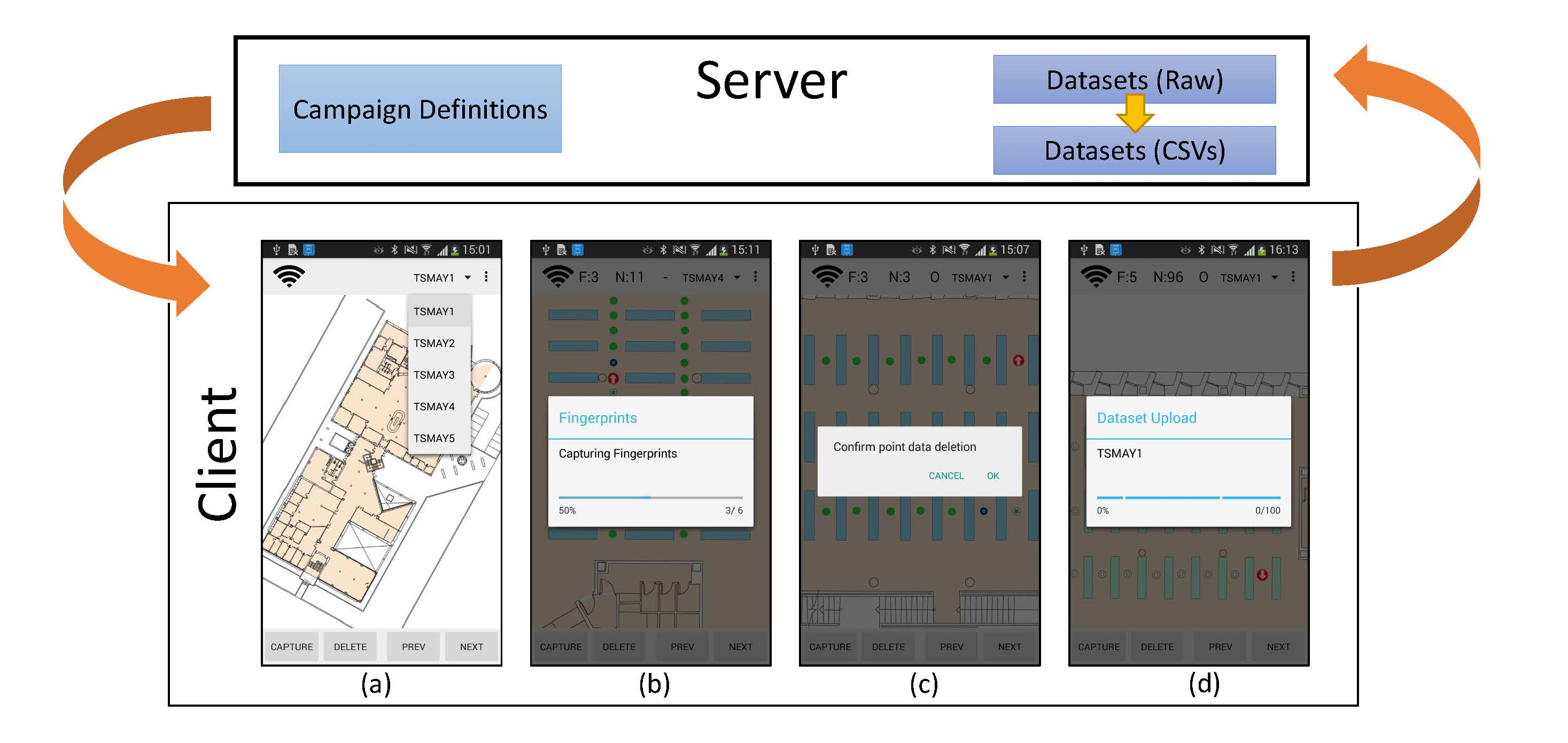
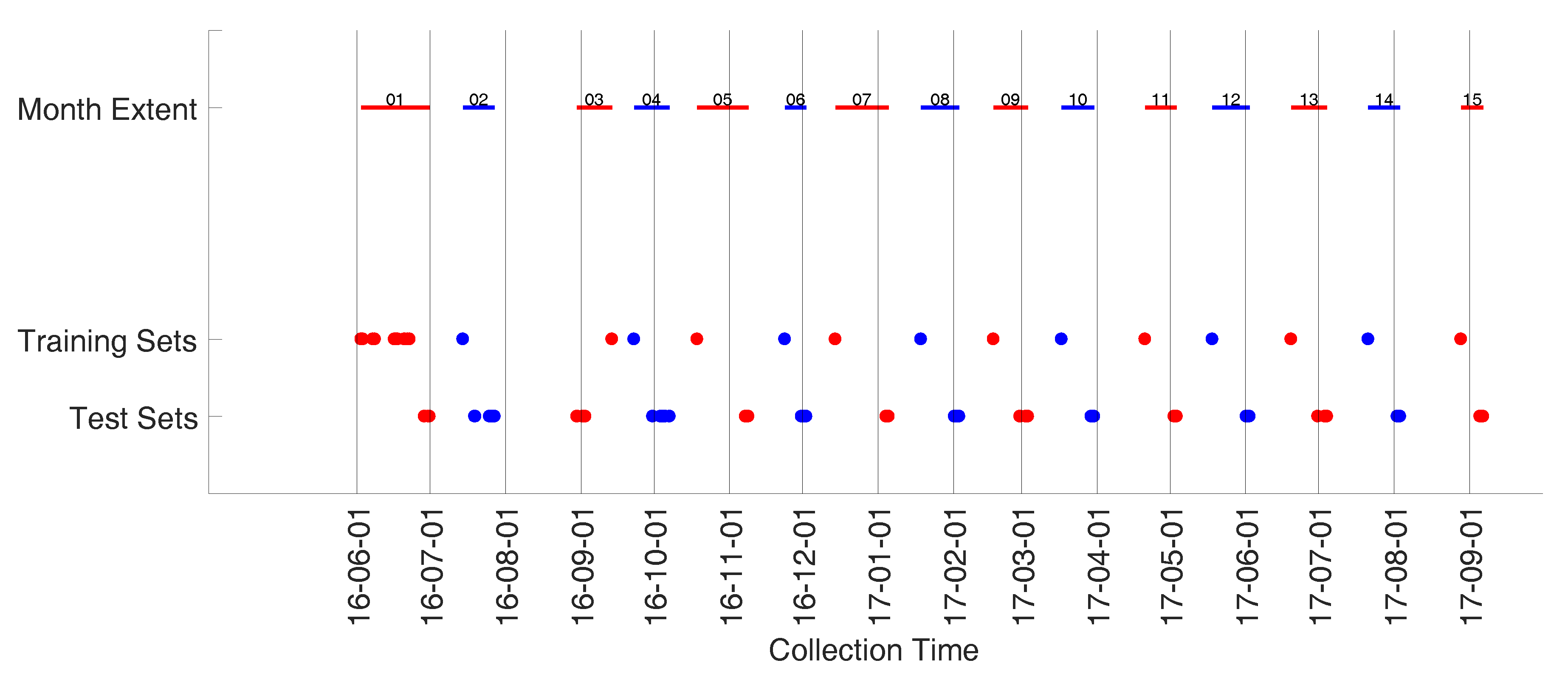
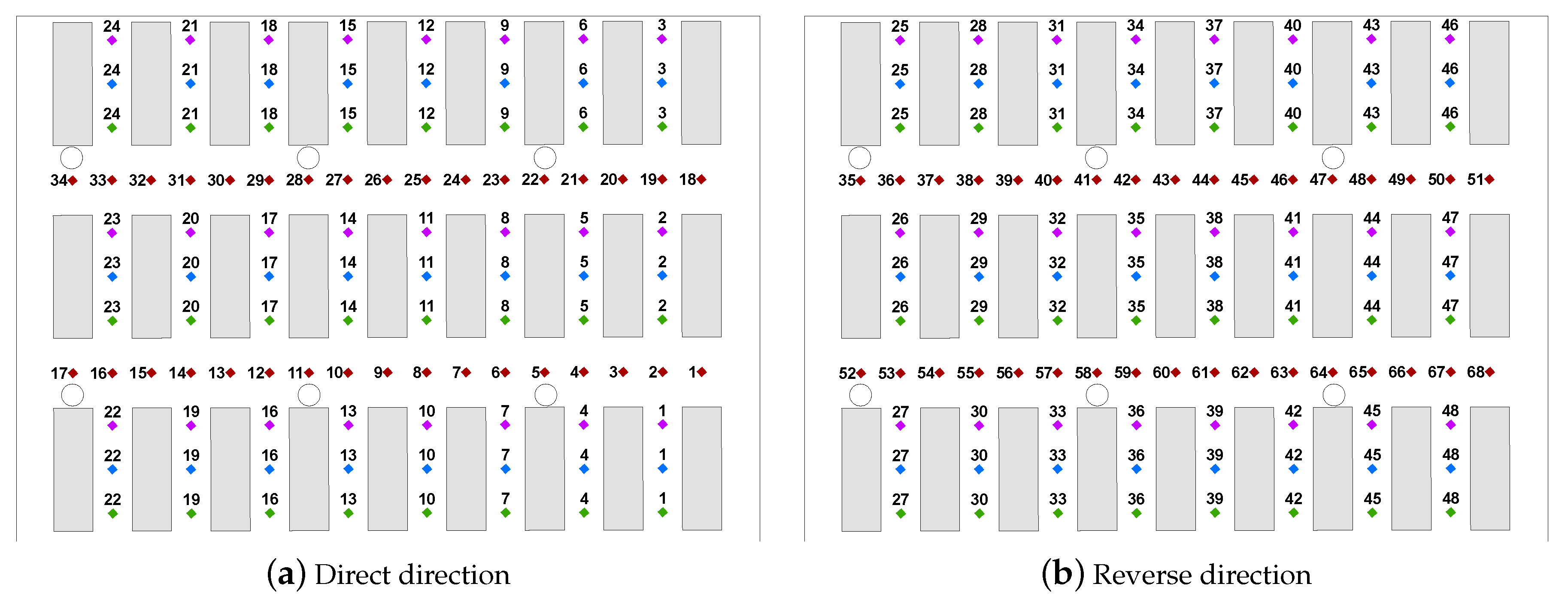
2. Collection Methodology
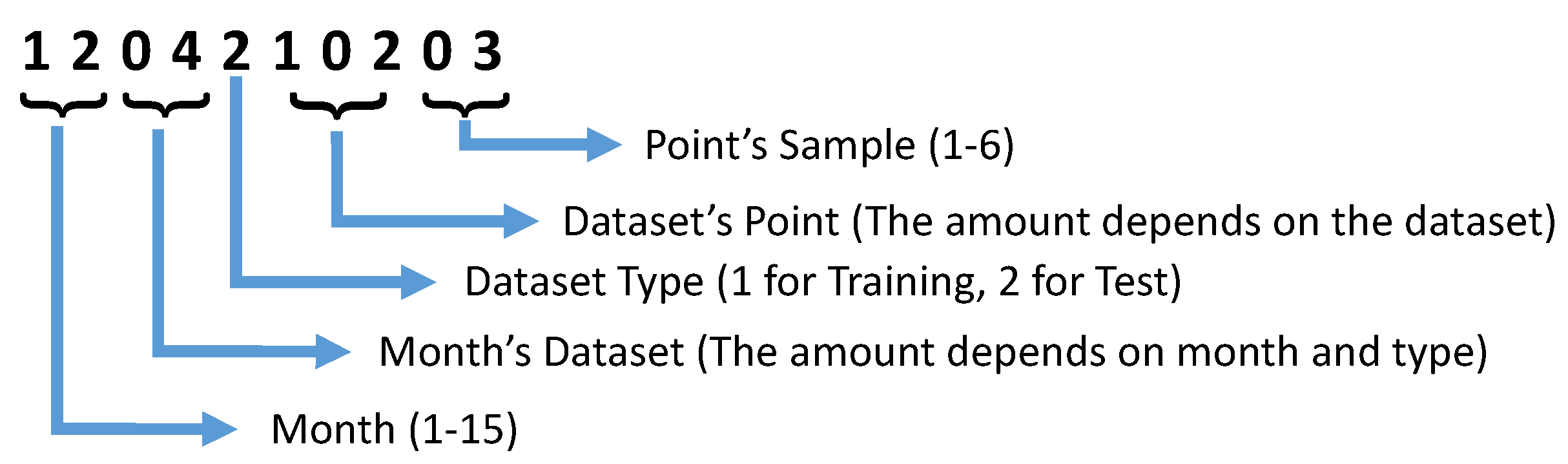
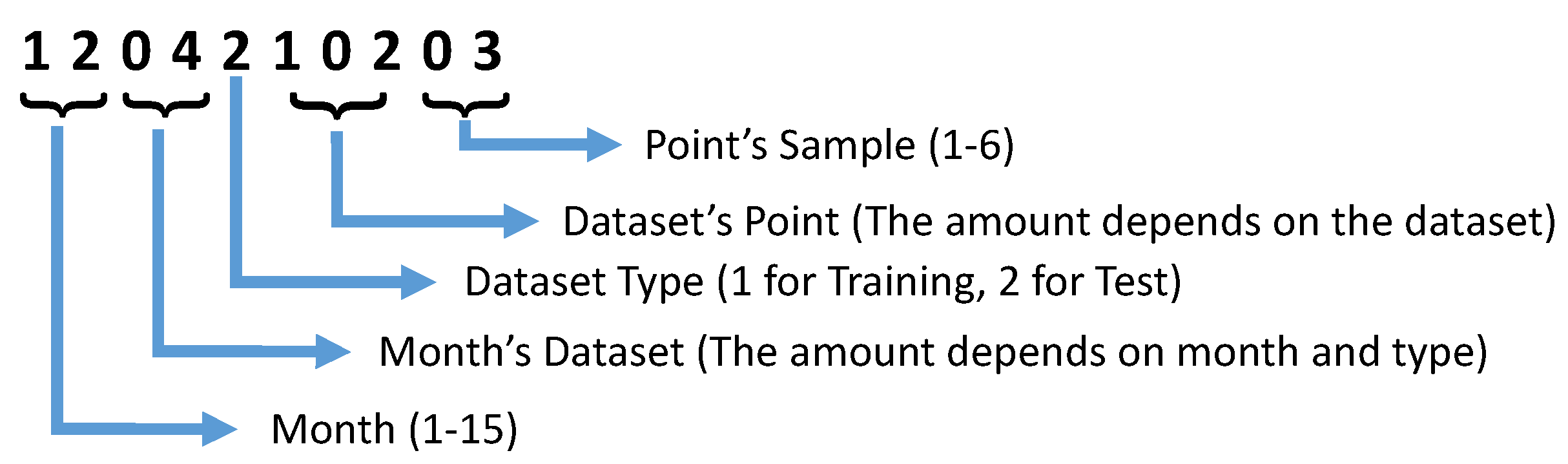
3. Long-Term WiFi Database
4. Usage Examples
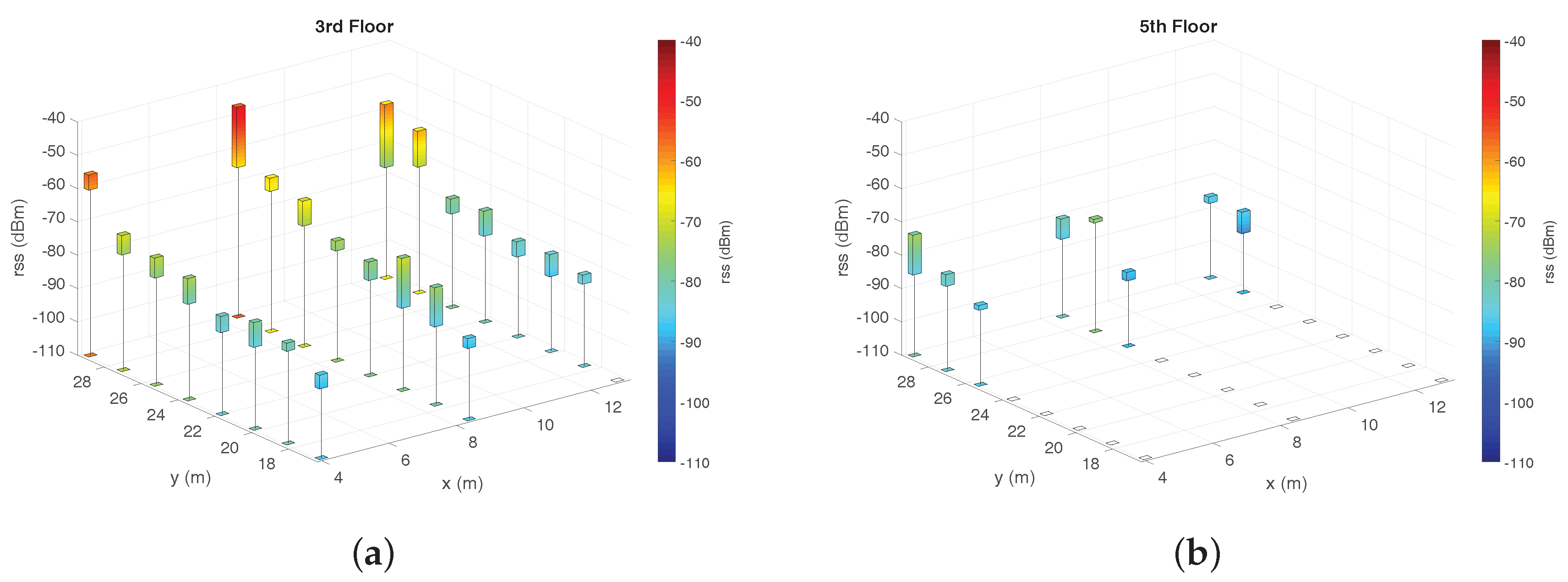
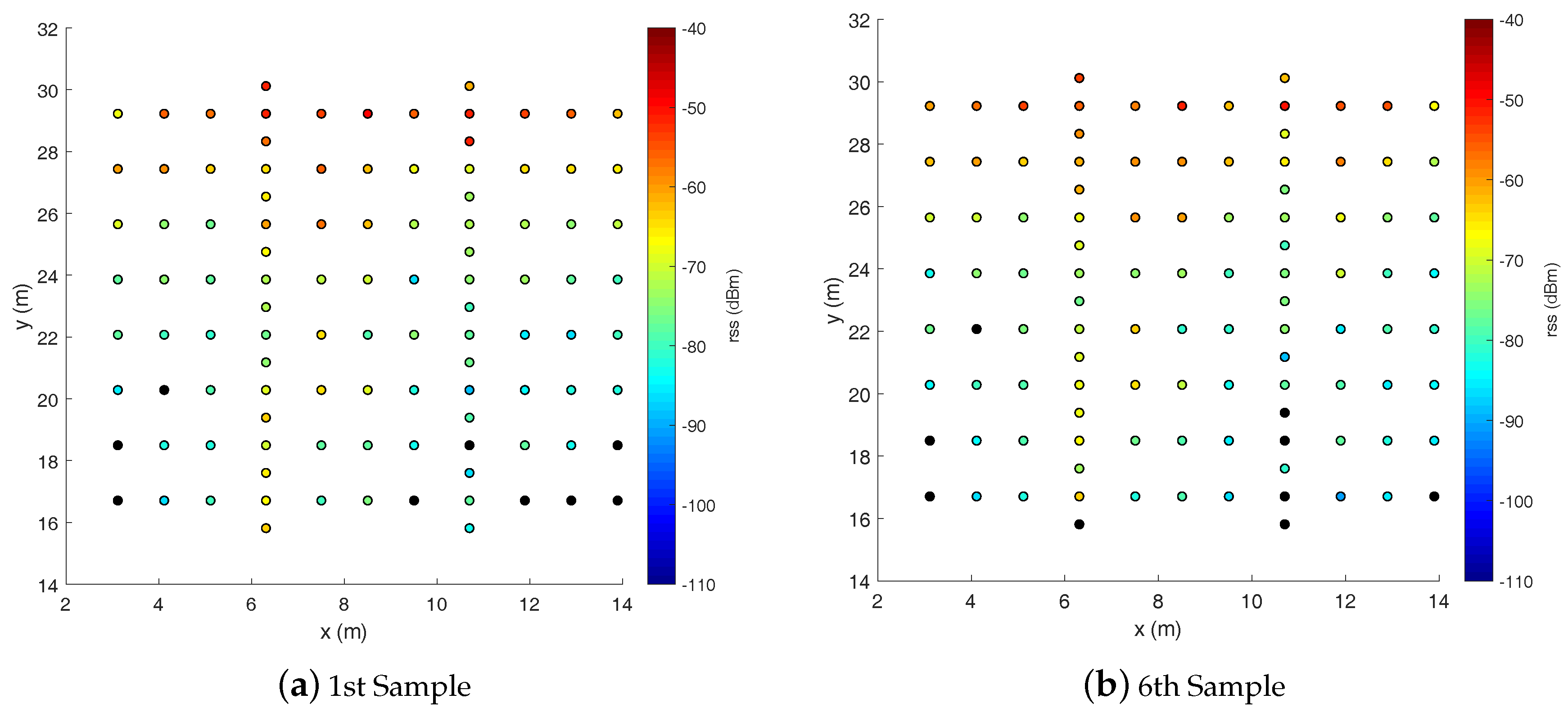
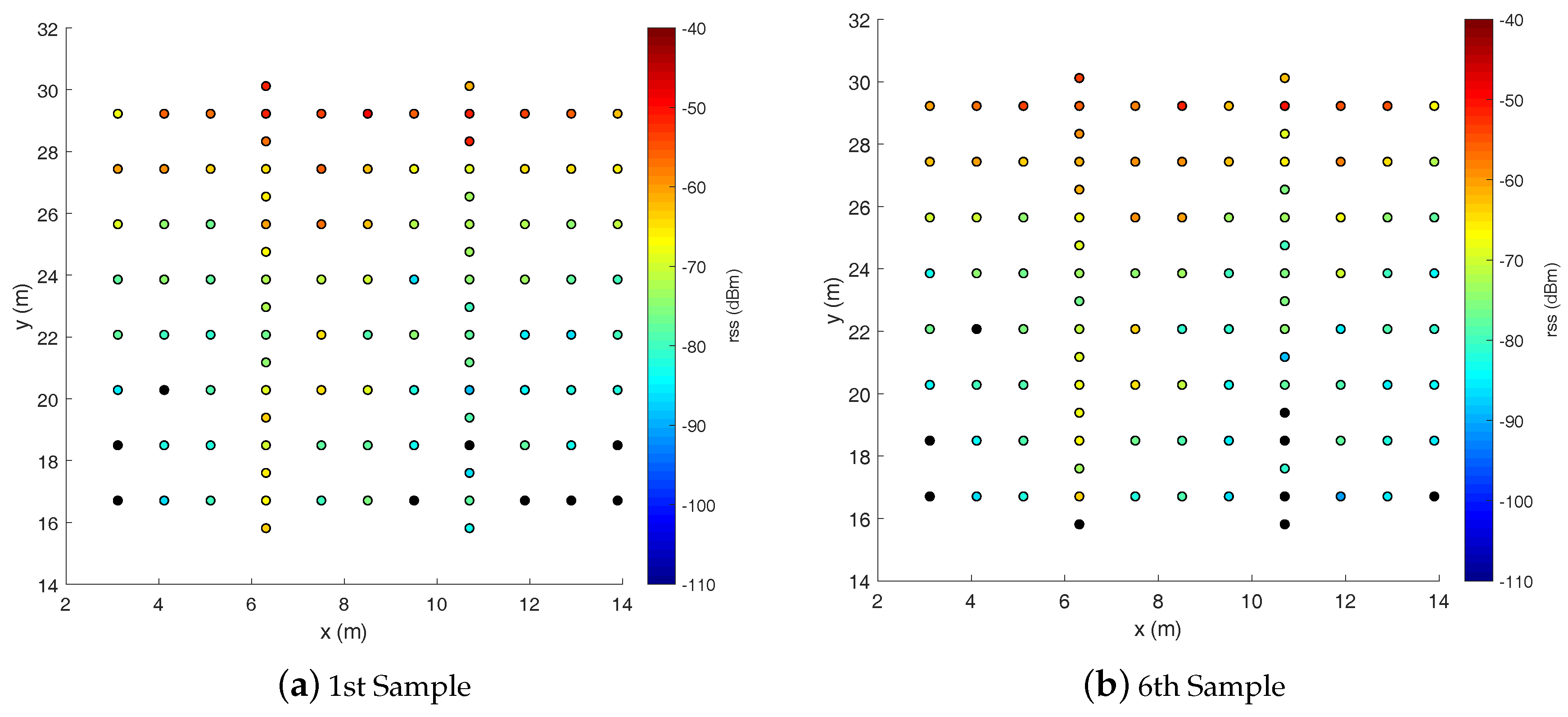
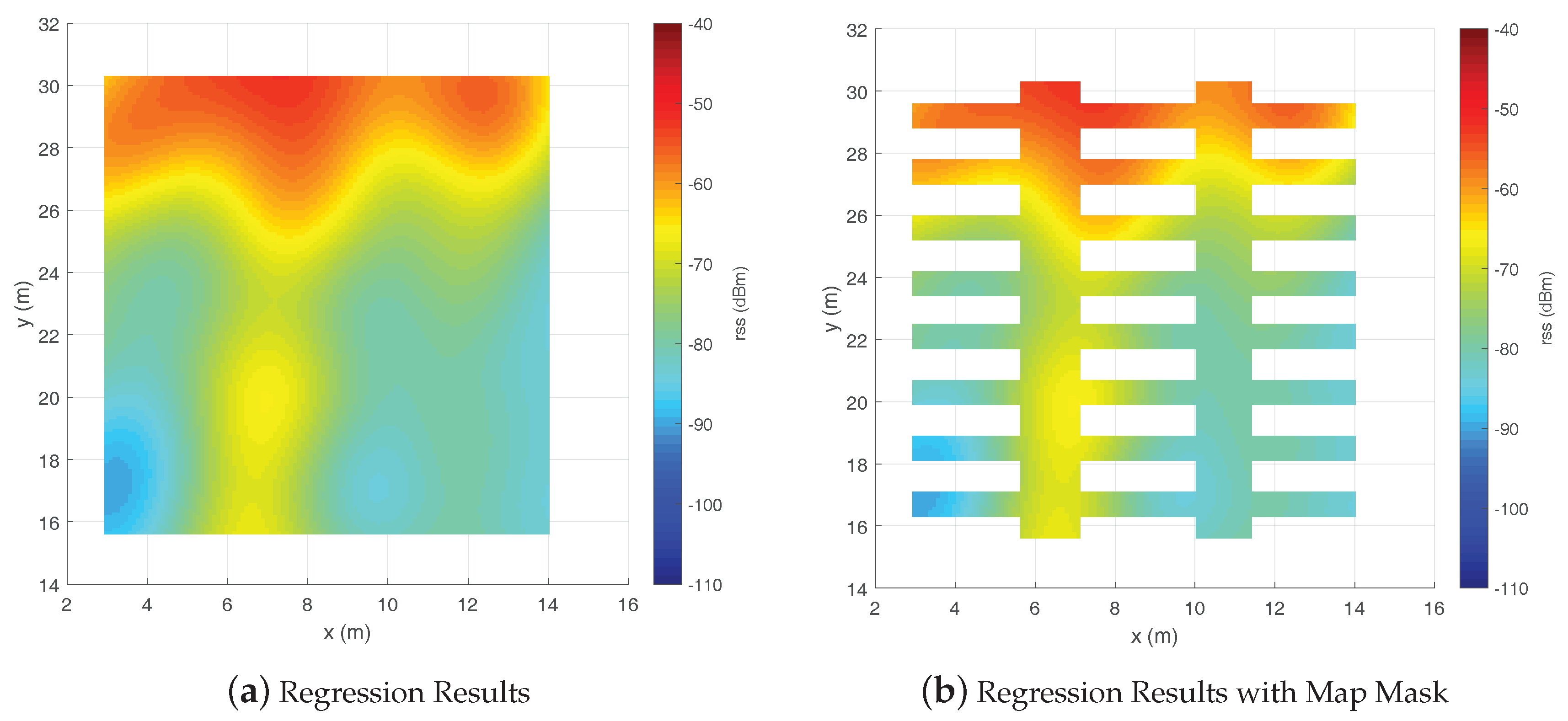
4.1. Signal Intensities
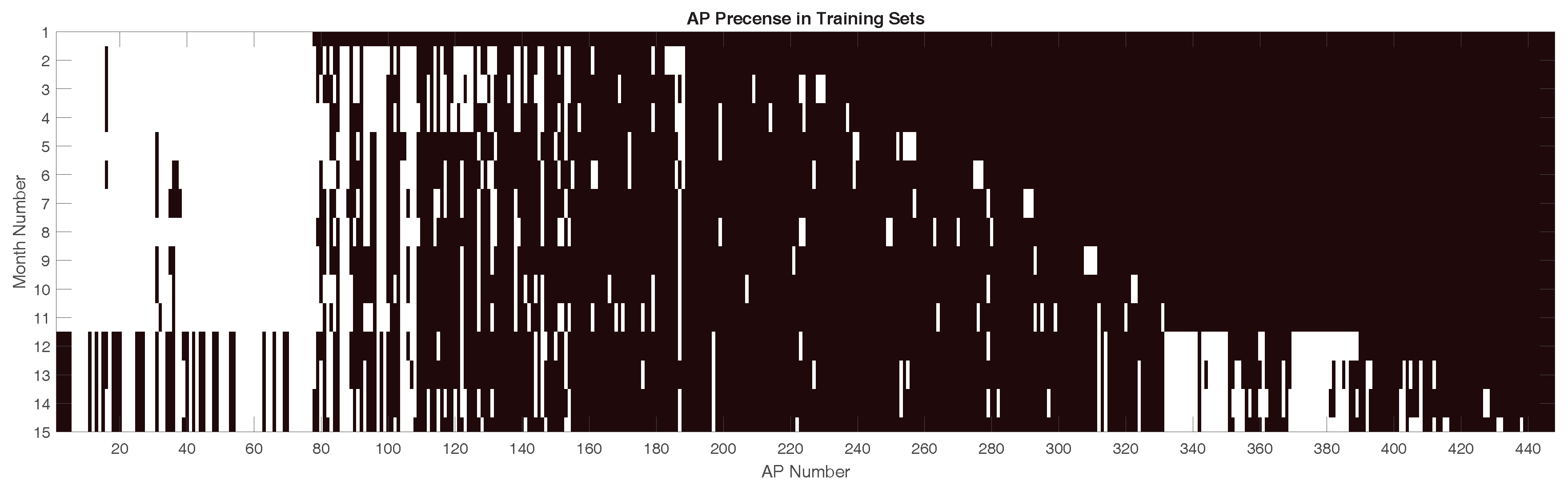
4.2. AP Ephemerality
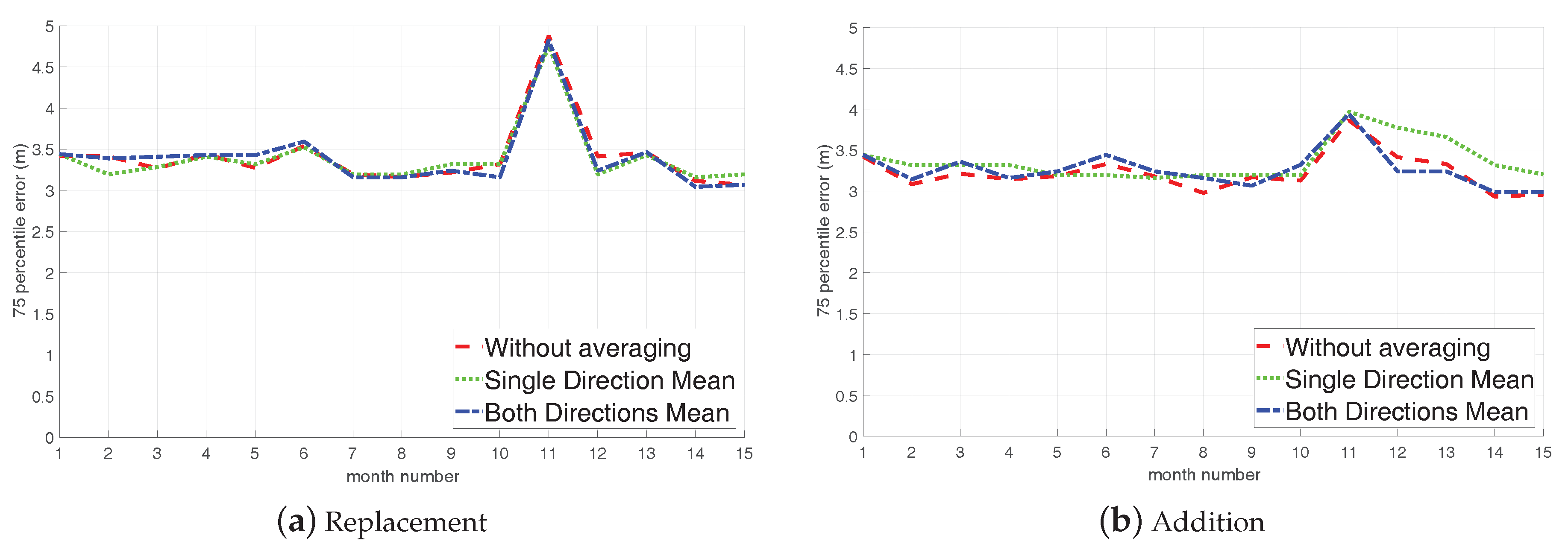
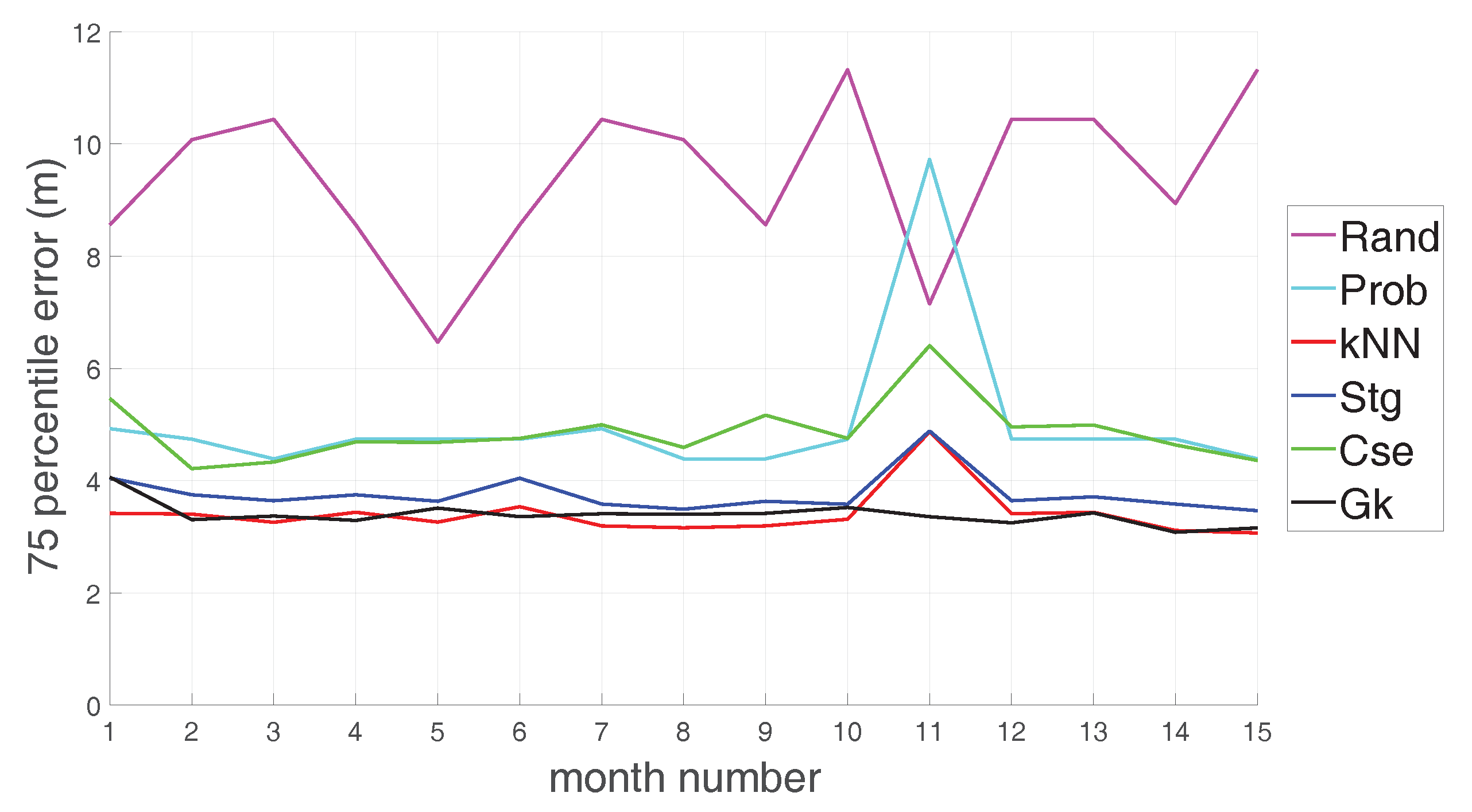
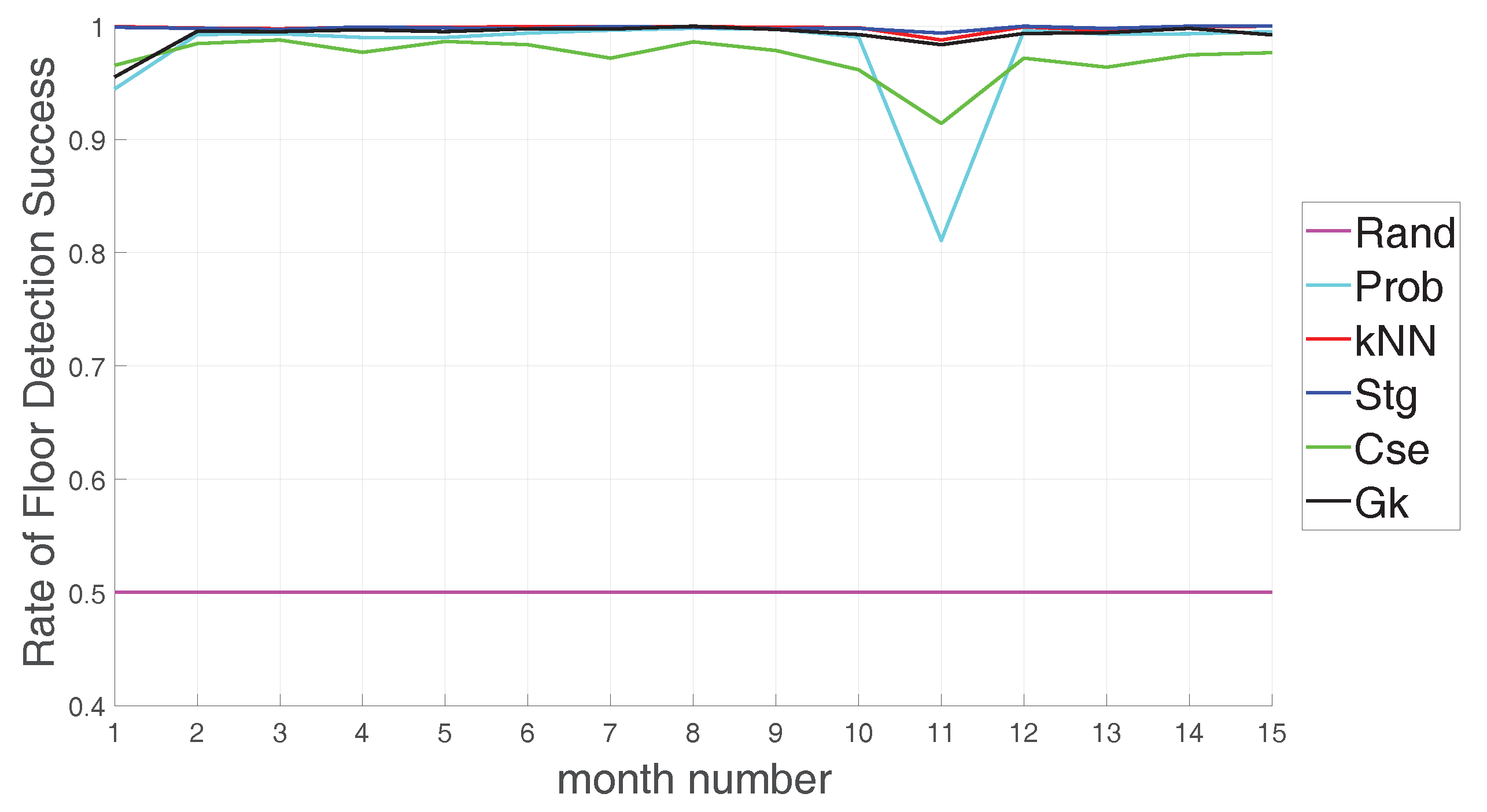
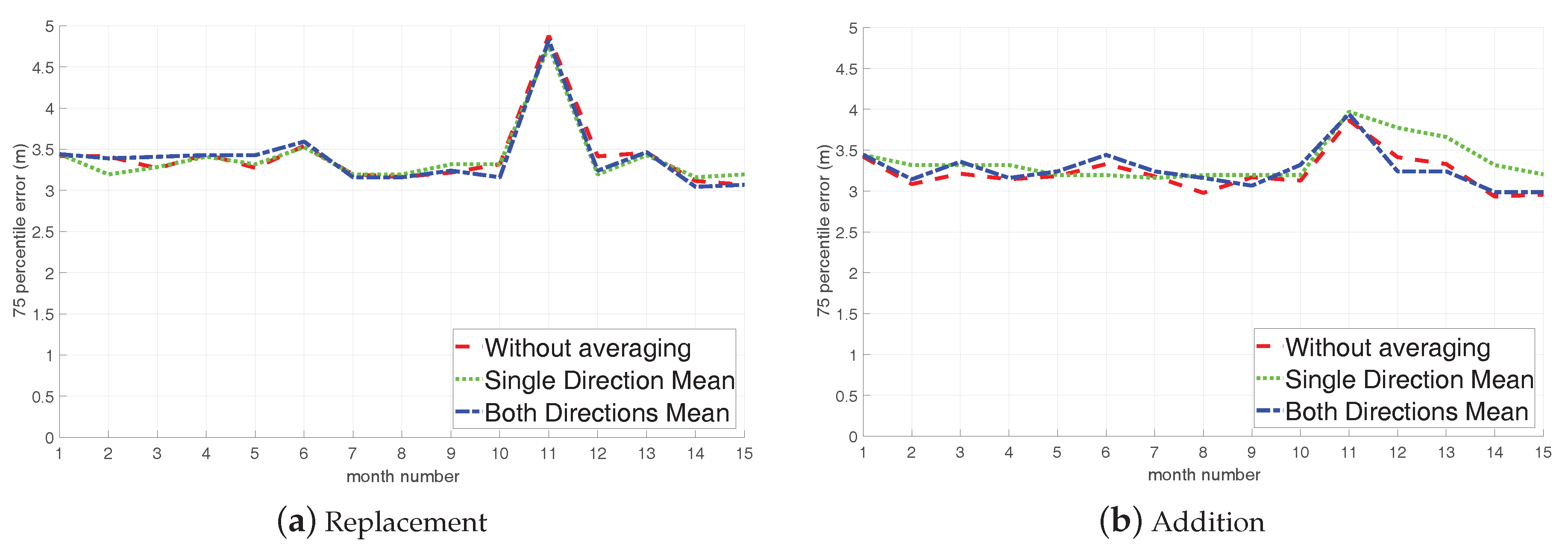
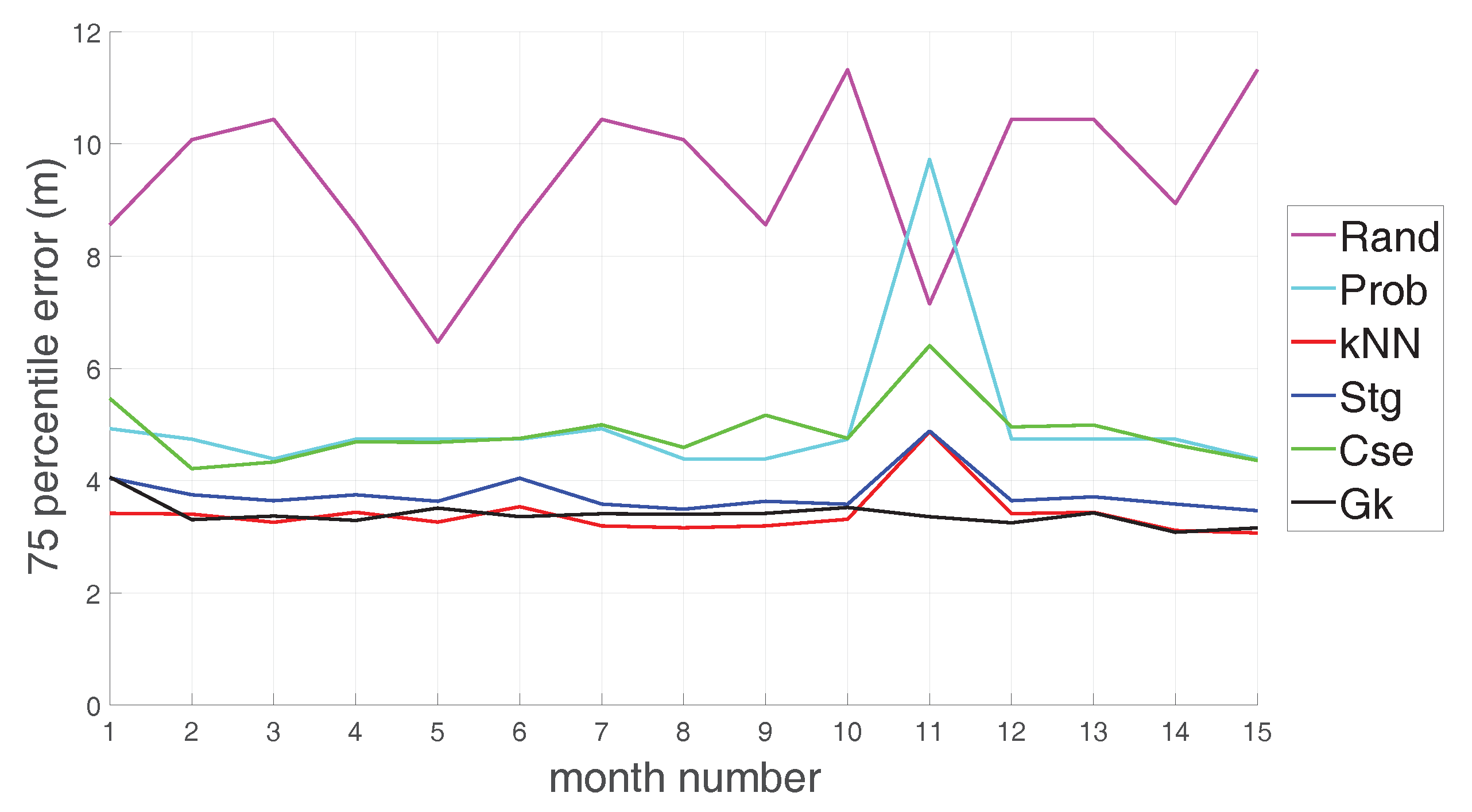
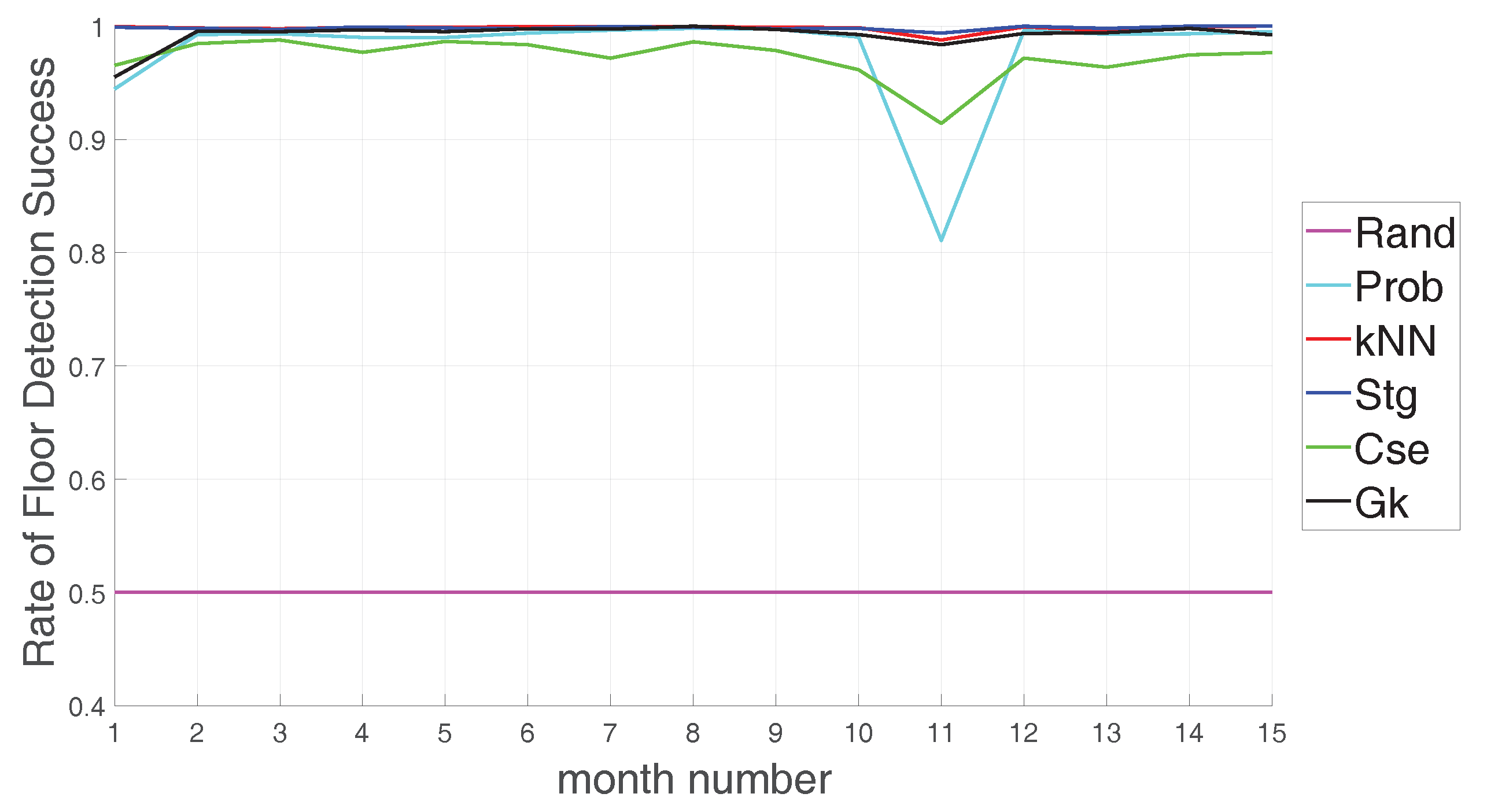
4.3. Positioning with Simple Algorithms
- Rand: The method returns a position (x, y, floor) from the training data chosen randomly. The positioning accuracy of this method is provided in order to have a lower expected accuracy measure, but the method’s results are not discussed.
- Prob: It is the known probabilistic method first presented by Youssef and Agrawala [44], which finds the position l (x, y, floor) from the training set that maximizes the probability of , with s being the operational fingerprint and with , where is the RSS value of the ith detected AP. In our settings, we have computed in a similar way as Berkvens et al. [41], specifically:where r refers to a variable in the RSS domain, is the normal distribution with mean and variance ; and are functions of l, the position, and are calculated for each point (position and collection direction).
- kNN: It is the known method first presented by Bahl and Padmanabhan [36], which finds the k closest samples in the fingerprint space to the operational fingerprint. The 2D position is estimated as the centroid of the positions (x, y) associated to the closest samples. In our settings, we use and the Euclidean distance as fingerprint distance. The floor estimation is the mode of the closest samples’ floors.
- Stg: This method perform an initial samples filtering [45], which selects samples whose APs with the s strongest RSS match those of the operational fingerprint. With the selected samples, kNN is applied, as explained before for the kNN method. In our settings, and .
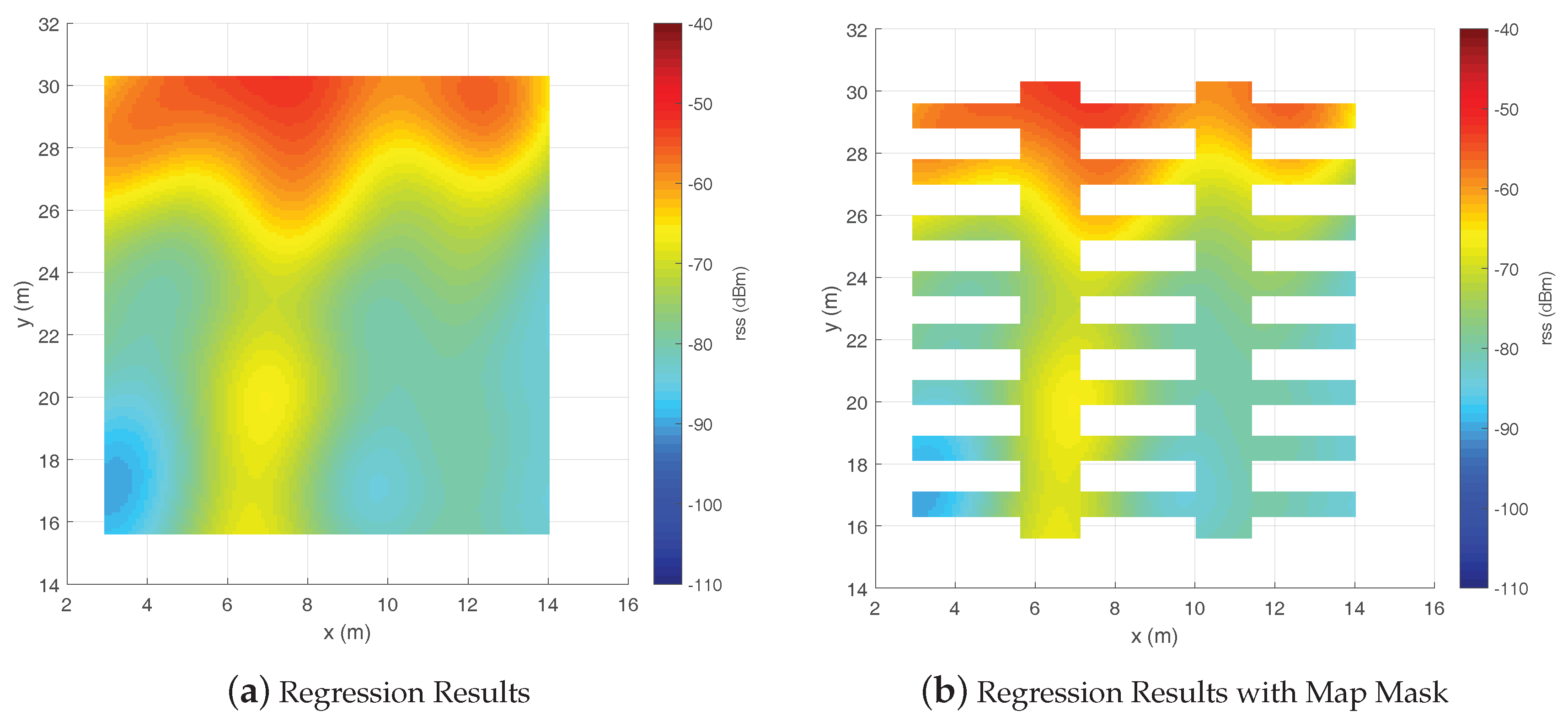
- CSE: It is based on the method proposed in Hernández et al. [46], in which an SVR is applied over the training data for a floor. From the regression results, per each AP and position, the RSS difference with the operational fingerprint is computed. The RSS difference is used to compute a score, so that positions with zero difference get the highest score. The score gets smaller as the difference increases, and it is zero beyond a margin m. The scores of each AP are summed up to obtain a general score for each position. A map mask is applied to discard unfeasible positions. Scores are computed independently for each floor. The position (x, y, floor) with highest general score is used as position estimate. In our settings, . SVR is used as provided by MathWorks® [43], using a Radial Basis Function (RBF) kernel and performing predictor data standardization. As map mask, we used the space of the library bookshelves.
- Gk: This algorithm is based on the parametric modeling of the logarithmic RSS as random process which follows a Normal distribution. Each RSS is considered mean value, whereas the standard deviation is set constant for all observations. It computes the likelihood of the RSS at each fingerprint position and determines the position estimate by averaging the positions that correspond to the highest likelihood value(s). This estimator was used first for WiFi RSS based positioning by Roos et al. [47], in form of a kernel density estimator (KDE). (The Gk method implemented in the Supplementary Materials does not exploit the six RSS samples; it uses only a single Gaussian kernel and therefore corresponds to the normally distributed likelihood [48]).
5. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bakillah, M.; Liang, S.H.; Zipf, A. Location-Based Services. In International Encyclopedia of Geography: People, the Earth, Environment and Technology; Wiley Online Library: Indianapolis, IN, USA, 2016. [Google Scholar]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed]
- Jimenez, A.; Seco, F. Comparing Ubisense, Bespoon and Decawave UWB location systems: Indoor performance analysis. IEEE Trans. Instrum. Meas. 2017, 66, 2106–2117. [Google Scholar] [CrossRef]
- Seco, F.; Jimenez, A.R.; Zampella, F. Fine-Grained Acoustic Positioning with Compensation of CDMA Interference. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 3418–3423. [Google Scholar]
- Hou, Y.; Xiao, S.; Bi, M.; Xue, Y.; Pan, W.; Hu, W. Single LED Beacon-Based 3-D Indoor Positioning Using Off-the-Shelf Devices. IEEE Photonics J. 2016, 8, 1–11. [Google Scholar] [CrossRef]
- Eighth International Conference on Indoor Positioning and Indoor Navigation. Available online: http://www.ipin2017.org/ (accessed on 11 January 2018).
- He, S.; Chan, S.H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Jiménez, A.R.; Knauth, S.; Moreira, A.; Beer, Y.; Fetzer, T.; Ta, V.C.; Montoliu, R.; Seco, F.; Mendoza-Silva, G.M.; et al. The Smartphone-Based Offline Indoor Location Competition at IPIN 2016: Analysis and Future Work. Sensors 2017, 17, 557. [Google Scholar] [CrossRef] [PubMed]
- Torres-Sospedra, J.; Montoliu, R.; Martínez-Usó, A.; Avariento, J.P.; Arnau, T.J.; Benedito-Bordonau, M.; Huerta, J. UJIIndoorLoc: A new multi-building and multi-floor database for WLAN fingerprint-based indoor localization problems. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014; pp. 261–270. [Google Scholar]
- Lohan, E.S.; Torres-Sospedra, J.; Leppäkoski, H.; Richter, P.; Peng, Z.; Huerta, J. Wi-Fi Crowdsourced Fingerprinting Dataset for Indoor Positioning. Data 2017, 2, 32. [Google Scholar] [CrossRef]
- Barry, A.; Fisher, B.; Chang, M.L. A Long-Duration Study of User-Trained 802.11 Localization. In Mobile Entity Localization and Tracking in GPS-Less Environnments: Second International Workshop, MELT 2009, Orlando, FL, USA, 30 September 2009; Fuller, R., Koutsoukos, X.D., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 197–212. [Google Scholar]
- Hossain, A.K.M.M.; Soh, W.S. A survey of calibration-free indoor positioning systems. Comput. Commun. 2015, 66, 1–13. [Google Scholar] [CrossRef]
- Wang, B.; Chen, Q.; Yang, L.T.; Chao, H.C. Indoor smartphone localization via fingerprint crowdsourcing: challenges and approaches. IEEE Wirel. Commun. 2016, 23, 82–89. [Google Scholar] [CrossRef]
- Gu, Y.; Chen, M.; Ren, F.; Li, J. HED: Handling environmental dynamics in indoor WiFi fingerprint localization. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016; pp. 1–6. [Google Scholar]
- Hayashi, T.; Taniuchi, D.; Korpela, J.; Maekawa, T. Spatio-temporal adaptive indoor positioning using an ensemble approach. Pervasive Mob. Comput. 2016, 41, 319–332. [Google Scholar] [CrossRef]
- Barsocchi, P.; Crivello, A.; La Rosa, D.; Palumbo, F. A multisource and multivariate dataset for indoor localization methods based on WLAN and geo-magnetic field fingerprinting. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Popleteev, A. AmbiLoc: A year-long dataset of FM, TV and GSM fingerprints for ambient indoor localization. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Kasebzadeh, P.; Hendeby, G.; Fritsche, C.; Gunnarsson, F.; Gustafsson, F. IMU Dataset For Motion and Device Mode Classification. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Hanley, D.; Faustino, A.; Zelman, S.; Degenhardt, D.; Bretl, T. MagPIE: A Dataset for Indoor Positioning with Magnetic Anomalies. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Montoliu, R.; Sansano, E.; Torres-Sospedra, J.; Belmonte, O. IndoorLoc Platform: A Public Repository for Comparing and Evaluating Indoor Positioning Systems. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- King, T.; Kopf, S.; Haenselmann, T.; Lubberger, C.; Effelsberg, W. COMPASS: A Probabilistic Indoor Positioning System Based on 802.11 and Digital Compasses. In Proceedings of the 1st International Workshop on Wireless Network Testbeds, Experimental Evaluation Characterization, Los Angeles, CA, USA, 29 September 2006; ACM: New York, NY, USA, 2006; pp. 34–40. [Google Scholar]
- King, T.; Kopf, S.; Haenselmann, T.; Lubberger, C.; Effelsberg, W. CRAWDAD Dataset Mannheim/Compass (v. 2008-04-11). Available online: https://crawdad.org/mannheim/compass/20080411/fingerprint (accessed on 11 January 2018).
- Lohan, E.; Talvitie, J. TUT Datasets. Available online: http://www.cs.tut.fi/tlt/pos/MEASUREMENTS_WLAN_FOR_WEB.zip (accessed on 11 January 2018).
- Torres-Sospedra, J.; Montoliu, R.; Martínez-Usó, A.; Avariento, J.P.; Arnau, T.J.; Benedito-Bordonau, M.; Huerta, J. UJIIndoorLoc Database. Available online: https://archive.ics.uci.edu/ml/datasets/ujiindoorloc (accessed on 11 January 2018).
- Bacciu, D.; Barsocchi, P.; Chessa, S.; Gallicchio, C.; Micheli, A. An experimental characterization of reservoir computing in ambient assisted living applications. Neural Comput. Appl. 2014, 24, 1451–1464. [Google Scholar] [CrossRef]
- Bacciu, D.; Barsocchi, P.; Chessa, S.; Gallicchio, C.; Micheli, A. Indoor User Movement Prediction from RSS Data Data Set. Available online: https://archive.ics.uci.edu/ml/datasets/Indoor+User+Movement+Prediction+from+RSS+data (accessed on 11 January 2018).
- Torres-Sospedra, J.; Montoliu, R.; Mendoza-Silva, G.M.; Belmonte, O.; Rambla, D.; Huerta, J. Providing Databases for Different Indoor Positioning Technologies: Pros and Cons of Magnetic Field and Wi-Fi Based Positioning. Mob. Inf. Syst. 2016, 2016, 6092618. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Montoliu, R.; Mendoza-Silva, G.M.; Belmonte, O.; Rambla, D.; Huerta, J. Geotec Database. Available online: http://indoorloc.uji.es/databases/geotecDatabaseWGS.zip (accessed on 11 January 2018).
- Torres-Sospedra, J.; Jiménez, A.R.; Knauth, S.; Moreira, A.; Beer, Y.; Fetzer, T.; Ta, V.C.; Montoliu, R.; Seco, F.; Mendoza-Silva, G.M.; et al. IPIN 2016 Competition Database. Available online: http://indoorloc.uji.es/ipin2016track3/ (accessed on 11 January 2018).
- Parasuraman, R.; Caccamo, S.; Baberg, F.; Ogren, P. CRAWDAD Dataset kth/rss (v. 2016-01-05). Available online: https://crawdad.org/kth/rss/20160105 (accessed on 11 January 2018).
- Tóth, Z.; Tamás, J. Miskolc IIS hybrid IPS: Dataset for hybrid indoor positioning. In Proceedings of the 2016 26th International Conference Radioelektronika (RADIOELEKTRONIKA), Kosice, Slovakia, 19–20 April 2016; pp. 408–412. [Google Scholar]
- Tóth, Z.; Tamás, J. Miskolc IIS Hybrid IPS: Dataset for Hybrid Indoor Positioning. Available online: https://archive.ics.uci.edu/ml/datasets/Hybrid+Indoor+Positioning+Dataset+from+WiFi+RSSI%2C+Bluetooth+and+magnetometer (accessed on 11 January 2018).
- Montoliu, R.; Sansano, E.; Torres-Sospedra, J.; Belmonte, O. IndoorLoc Platform Databases. Available online: http://indoorlocplatform.uji.es/ (accessed on 11 January 2018).
- Barsocchi, P.; Crivello, A.; La Rosa, D.; Palumbo, F. Geo-Magnetic Field and WLAN Dataset for Indoor Localisation from Wristband and Smartphone Data Set. Available online: https://archive.ics.uci.edu/ml/datasets/Geo-Magnetic+field+and+WLAN+dataset+for+indoor+localisation+from+wristband+and+smartphone (accessed on 11 January 2018).
- IPIN 2017 Competition Database. Available online: http://indoorloc.uji.es/ipin2017track3// (accessed on 11 January 2018).
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies, Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Qianqian, L.; Yubin, X.; Mu, Z.; Zhi-an, D.; Yao, L. Characteristics of Fingerprint Location Technology in WLAN Environment. In Proceedings of the 2009 International Forum on Information Technology and Applications, Chengdu, China, 15–17 May 2009; Volume 2, pp. 40–43. [Google Scholar]
- Fang, S.H.; Wang, C.H.; Tsao, Y. Compensating for orientation mismatch in robust Wi-Fi localization using histogram equalization. IEEE Trans. Veh. Technol. 2015, 64, 5210–5220. [Google Scholar] [CrossRef]
- Mendoza-Silva, G.M.; Richter, P.; Torres-Sospedra, J.; Lohan, E.S.; Huerta, J. Long-Term Wi-Fi Fingerprinting Dataset and Supporting Material. Available online: https://zenodo.org/record/1066040 (accessed on 11 January 2018).
- Kaemarungsi, K.; Krishnamurthy, P. Analysis of WLAN’s received signal strength indication for indoor location fingerprinting. Pervasive Mob. Comput. 2012, 8, 292–316. [Google Scholar] [CrossRef]
- Berkvens, R.; Peremans, H.; Weyn, M. Conditional Entropy and Location Error in Indoor Localization Using Probabilistic Wi-Fi Fingerprinting. Sensors 2016, 16, 1636. [Google Scholar] [CrossRef] [PubMed]
- Drucker, H.; Burges, C.J.; Kaufman, L.; Smola, A.J.; Vapnik, V. Support vector regression machines. In Advances in Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 1997; pp. 155–161. [Google Scholar]
- MathWorks. Support Vector Machine Regression. In MATLAB® R2017b and Statistics and Machine Learning ToolboxTM; MathWorks: Natick, MA, USA, 2017. [Google Scholar]
- Youssef, M.; Agrawala, A. The Horus WLAN Location Determination System. In Proceedings of the 3rd International Conference on Mobile Systems, Applications, and Services, Seattle, WA, USA, 6–8 June 2005; ACM: New York, NY, USA, 2005; pp. 205–218. [Google Scholar]
- Marques, N.; Meneses, F.; Moreira, A. Combining similarity functions and majority rules for multi-building, multi-floor, WiFi positioning. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; pp. 1–9. [Google Scholar]
- Hernández, N.; Ocaña, M.; Alonso, J.M.; Kim, E. Continuous Space Estimation: Increasing WiFi-Based Indoor Localization Resolution without Increasing the Site-Survey Effort. Sensors 2017, 17, 147. [Google Scholar] [CrossRef] [PubMed]
- Roos, T.; Myllymäki, P.; Tirri, H.; Misikangas, P.; Sievänen, J. A Probabilistic Approach to WLAN User Location Estimation. Int. J. Wirel. Inf. Netw. 2002, 9, 155–164. [Google Scholar] [CrossRef]
- Honkavirta, V. Location Fingerprinting Methods in Wireless Local Area Networks. Master’s Thesis, Tampere University of Technology, Tampere, Finland, 2008. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Title | Year | Details | Long-Time Potential | Short-Time Potential |
|---|---|---|---|---|
| Fingerprint traceset from mannheim/compass dataset | 2008 | [21,22] | Collected during one day. | 110 samples per Reference Point (RP). |
| Indoor WLAN measurement database | 2014 | [23] | Samples taken in 2011, and again in 2013 for one of the floors. No time-stamp. | One fingerprint per RP. |
| UJIIndoorLoc Database | 2014 | [9,24] | For training data, 73.67% of measurements were collected one day, the rest were collected in 5 days spanning 14 days. For validation data, 63.18% were collected one day, the rest were collected in 8 days spanning 20 days. | Up to 10 consecutive samples per RP for training data, 1 per RP for testing data. |
| Indoor User Movement Prediction from RSSI data Data Set | 2016 | [25,26] | No collection-time information is provided. | Path-based sensor measurements 8 times per second. |
| Geotec Database | 2016 | [27,28] | Collected during 2 days (4 days apart). | 5 samples per RP. |
| IPIN 2016 Competition Database | 2016 | [8,29] | Collection times vary among buildings. For the same building, max. collection days is 3 (14 days apart). | Path-based. Samples every 4–6 s. Paths taken once per direction. |
| kth/rss dataset | 2016 | [30] | Collected during one day. | The amount of samples per RP is not uniform. |
| WiFi RSSI, Bluetooth and magnetometer DataSet | 2016 | [31,32] | Collected during one day. | One sample per RP. |
| Alcalá Tutorial Database | 2017 | [20,33] | No timestamp provided. Collected during one day. | 10 samples per RP. |
| Crowdsourced WiFi fingerprinting database | 2017 | [10] | Crowdsourced during 8 months. | Usually one sample per RP. |
| Geo-Magnetic field and WLAN dataset Data Set | 2017 | [16,34] | Collected during two days (5 days apart). | One sample per RP. |
| IPIN 2016 Tutorial Database | 2017 | [20] | Collected during one day. | 3 samples per RP. |
| IPIN 2017 Competition Database | 2017 | [35] | Similar to IPIN 2016 Competition. For the same building, max. collection days is 3 (6 days apart). | Similar to IPIN 2016 Competition. Samples every 4 s. |
| Sample Pair | 1–2 | 2–3 | 3–4 | 4–5 | 5–6 |
| Mean Difference (dBm) | 3.19 | 2.06 | 1.82 | 1.74 | 1.95 |
| Month | Total | New | Gone | Returned | Re-gone | Seen |
|---|---|---|---|---|---|---|
| 01 | 77 | 77 | 0 | 0 | 0 | 77 |
| 02 | 126 | 50 | 1 | 0 | 0 | 127 |
| 03 | 127 | 15 | 14 | 0 | 0 | 142 |
| 04 | 125 | 8 | 17 | 7 | 0 | 150 |
| 05 | 110 | 10 | 24 | 4 | 5 | 160 |
| 06 | 110 | 6 | 14 | 13 | 5 | 166 |
| 07 | 104 | 5 | 13 | 10 | 8 | 171 |
| 08 | 114 | 6 | 6 | 16 | 6 | 177 |
| 09 | 98 | 6 | 8 | 2 | 16 | 183 |
| 10 | 106 | 5 | 6 | 10 | 1 | 188 |
| 11 | 119 | 10 | 5 | 14 | 6 | 198 |
| 12 | 110 | 43 | 39 | 8 | 21 | 241 |
| 13 | 114 | 11 | 9 | 7 | 5 | 252 |
| 14 | 133 | 10 | 5 | 18 | 4 | 262 |
| 15 | 129 | 8 | 11 | 9 | 10 | 270 |
| Number | Total | New | Gone | Returned | Re-Gone | Seen | Since 1st Day |
|---|---|---|---|---|---|---|---|
| 01 | 77 | 77 | 0 | 0 | 0 | 77 | 0 |
| 02 | 97 | 22 | 2 | 0 | 0 | 99 | 1 |
| 03 | 118 | 23 | 4 | 2 | 0 | 122 | 5 |
| 04 | 106 | 9 | 23 | 2 | 0 | 131 | 6 |
| 05 | 127 | 19 | 12 | 15 | 1 | 150 | 14 |
| 06 | 119 | 4 | 14 | 8 | 6 | 154 | 14 |
| 07 | 126 | 5 | 4 | 9 | 3 | 159 | 15 |
| 08 | 120 | 3 | 6 | 6 | 9 | 162 | 15 |
| 09 | 112 | 4 | 6 | 8 | 14 | 166 | 18 |
| 10 | 125 | 6 | 4 | 15 | 4 | 172 | 18 |
| 11 | 119 | 4 | 7 | 6 | 9 | 176 | 18 |
| 12 | 115 | 1 | 8 | 16 | 13 | 177 | 18 |
| 13 | 127 | 4 | 1 | 15 | 6 | 181 | 19 |
| 14 | 124 | 0 | 4 | 15 | 14 | 181 | 20 |
| 15 | 119 | 1 | 2 | 9 | 13 | 182 | 20 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mendoza-Silva, G.M.; Richter, P.; Torres-Sospedra, J.; Lohan, E.S.; Huerta, J. Long-Term WiFi Fingerprinting Dataset for Research on Robust Indoor Positioning. Data 2018, 3, 3. https://doi.org/10.3390/data3010003
Mendoza-Silva GM, Richter P, Torres-Sospedra J, Lohan ES, Huerta J. Long-Term WiFi Fingerprinting Dataset for Research on Robust Indoor Positioning. Data. 2018; 3(1):3. https://doi.org/10.3390/data3010003
Chicago/Turabian StyleMendoza-Silva, Germán Martín, Philipp Richter, Joaquín Torres-Sospedra, Elena Simona Lohan, and Joaquín Huerta. 2018. "Long-Term WiFi Fingerprinting Dataset for Research on Robust Indoor Positioning" Data 3, no. 1: 3. https://doi.org/10.3390/data3010003
APA StyleMendoza-Silva, G. M., Richter, P., Torres-Sospedra, J., Lohan, E. S., & Huerta, J. (2018). Long-Term WiFi Fingerprinting Dataset for Research on Robust Indoor Positioning. Data, 3(1), 3. https://doi.org/10.3390/data3010003