Wi-Fi Crowdsourced Fingerprinting Dataset for Indoor Positioning

 ,
,  ,
,  , ,
, , 
Abstract
:Abstract
Data Set
Data Set License
1. Introduction and Motivation
- Non-standardized measurement spaces, ranging from one or two rooms to multi-floor multi-corridor buildings, or even multiple multi-story buildings
- Non-standardized conventions regarding the stored data, for example referring to: how to store the RSS of heard Access Points (AP) in a certain measurement point (dBm versus linear scale, conventions for non-heard AP, etc.), how many RSS and AP values to store per measurement point (all heard versus some truncation rule), how often to collect the measurements and with which spacing or grid, etc.
- Non-standardized localization hardware, having many different AP models and many possible strategies to deploy the Wi-Fi network infrastructure
- Non-unified understanding regarding the available data, for example: how to treat an AP heard over multiple floors (if separately per floor or in a 3D space), how to interpret the data stored floor by floor where the height dimension is missing, etc.
2. Dataset Description
2.1. Fingerprinting Dataset
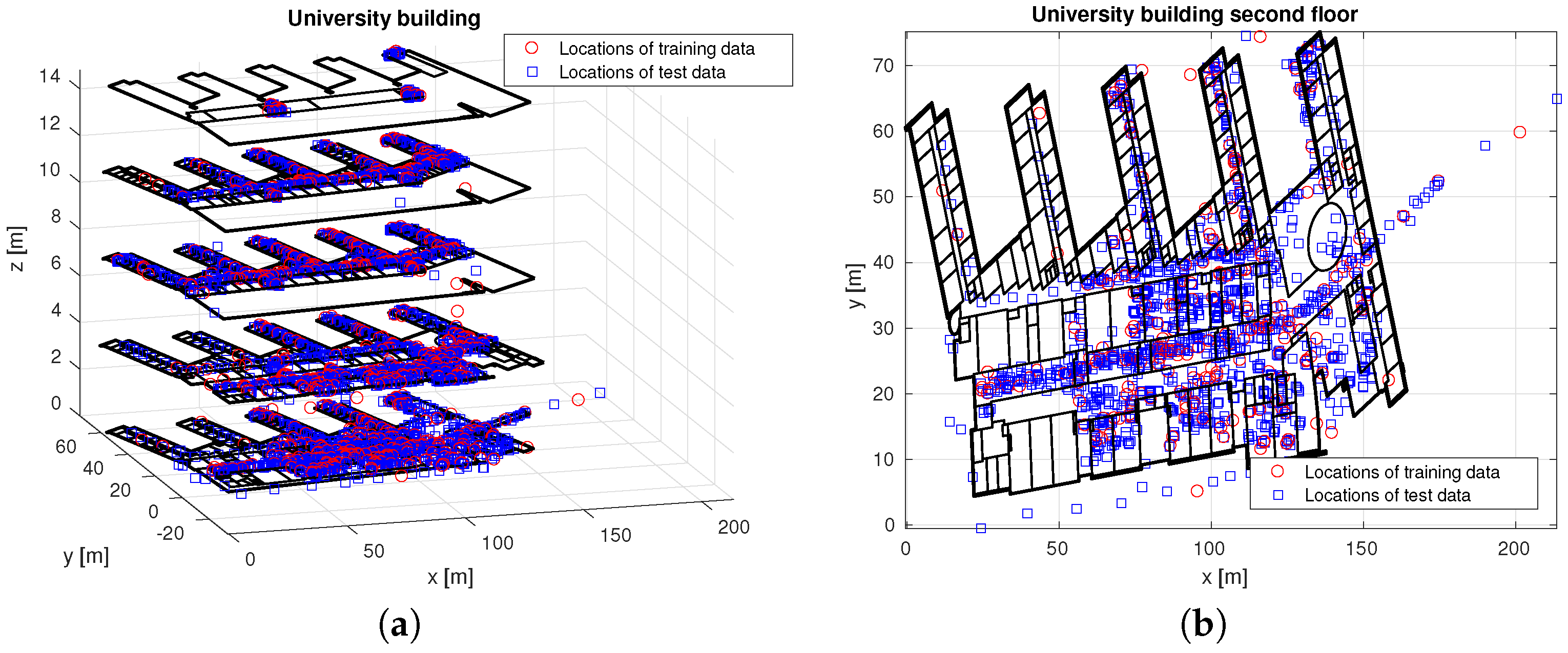
- Coordinates file: Each row shows the coordinate (in meters) where the measurements were done. These are the local coordinates, not the GPS coordinates (WGS84 or similar), so that they can be directly used for positioning studies. Example: for the first measurement in the test fingerprints.
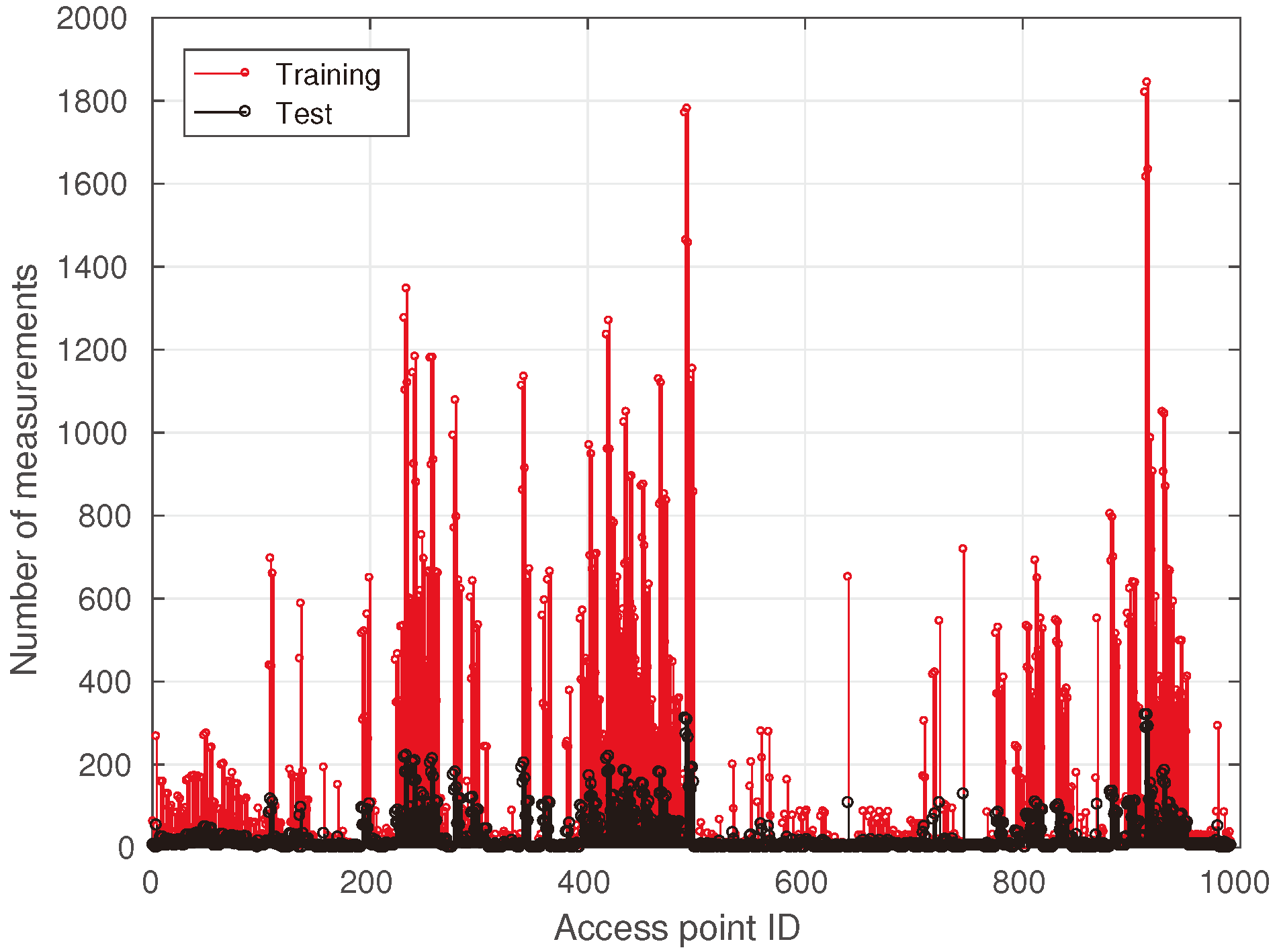
- RSS file: This is a large file with columns, showing the RSS level at which each of the MAC addresses were heard in each measurement point. Each row corresponds to one measurement. The non-heard APs are set to dBm, which is a fixed bogus value. If an MAC address is heard, then it is heard at a negative level (in dBm). For example, in the training RSS file, Access Point 2 was not heard (i.e., value of 100); Access Point 420 was heard at dBm; and Access Point 489 was heard with dBm.
- Date file: This is a single column file, where each row shows the date at which each measurement from the corresponding training or test sets was done. For example, the measurement indexed one from the test data was taken on 18 August 2017 at 11:59:23. The measurement dates are not sorted chronologically; they were stored in a non-chronological order on the cloud server when the measurements were done. However, the four training data files are perfectly synchronized, meaning that the n-th row in each of the training file is always matched to the n-th row in the other training files, with . Similarly, the four test data files are also synchronized.
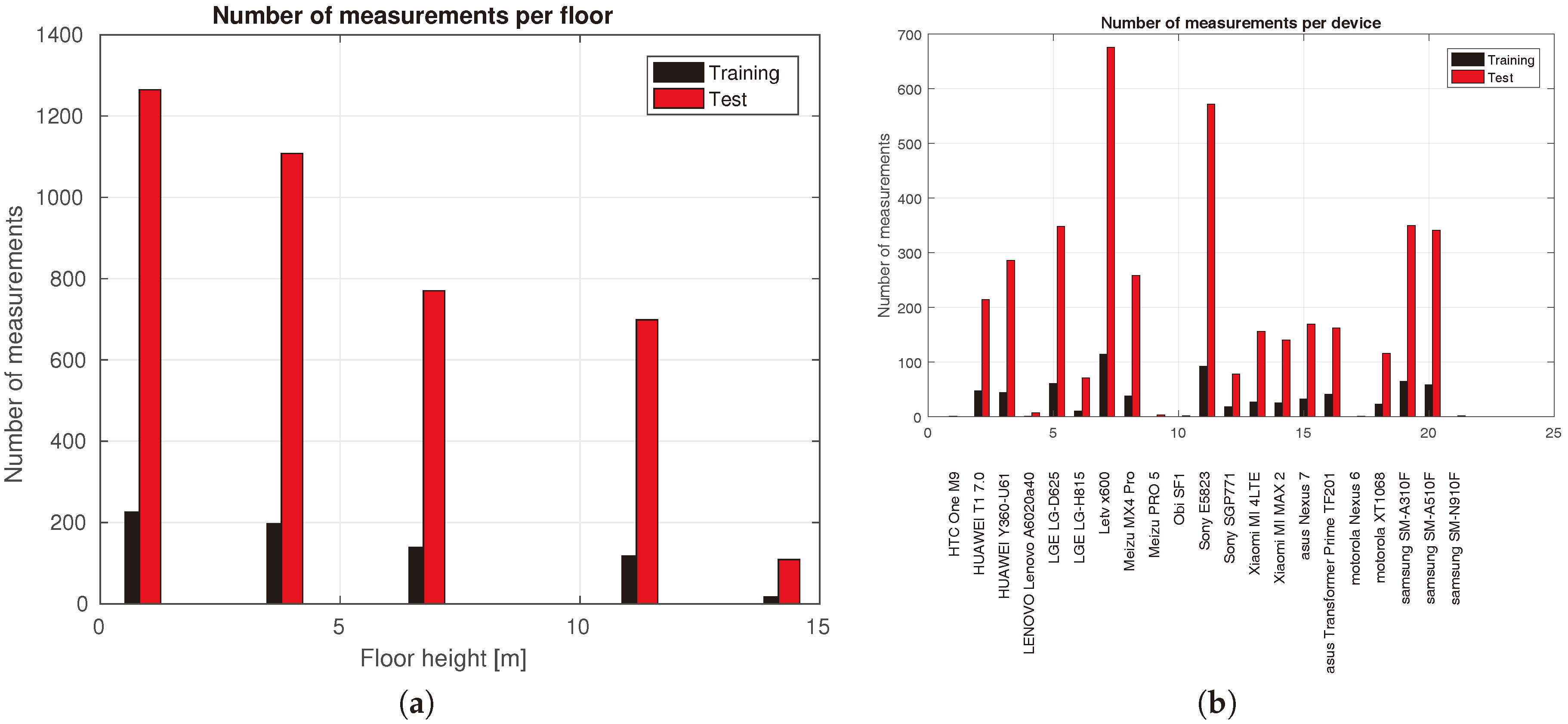
- Device file: This is another single column file, where each row shows what Android device was used for that particular measurement. For example, the third measurement in the training data was collected with a Samsung SM-A10F device, and the 15th measurement in the test data was collected with a Xiaomi MI MAX 2 device.
2.2. Supporting Software
- reads the ‘csv’ data and writes it into two MATLAB cell structures, one for the training and one for the test datasets
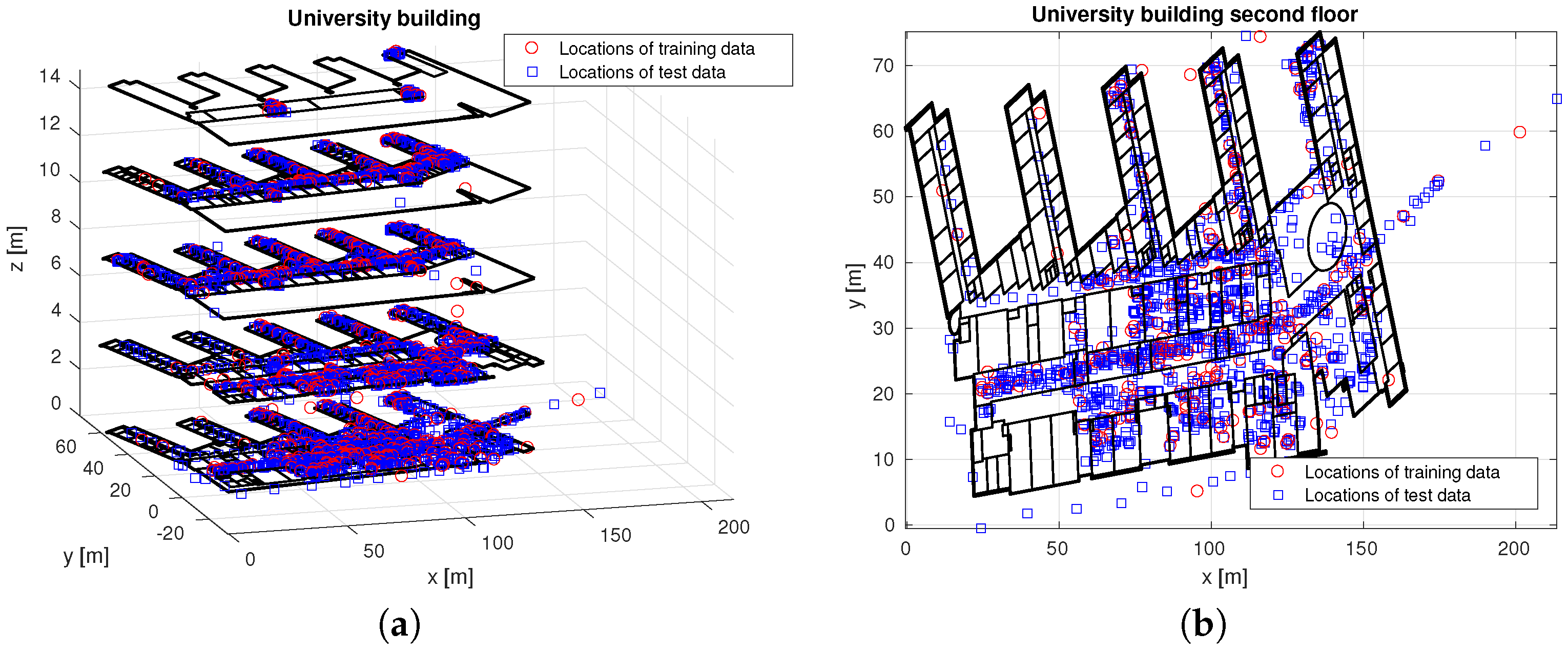
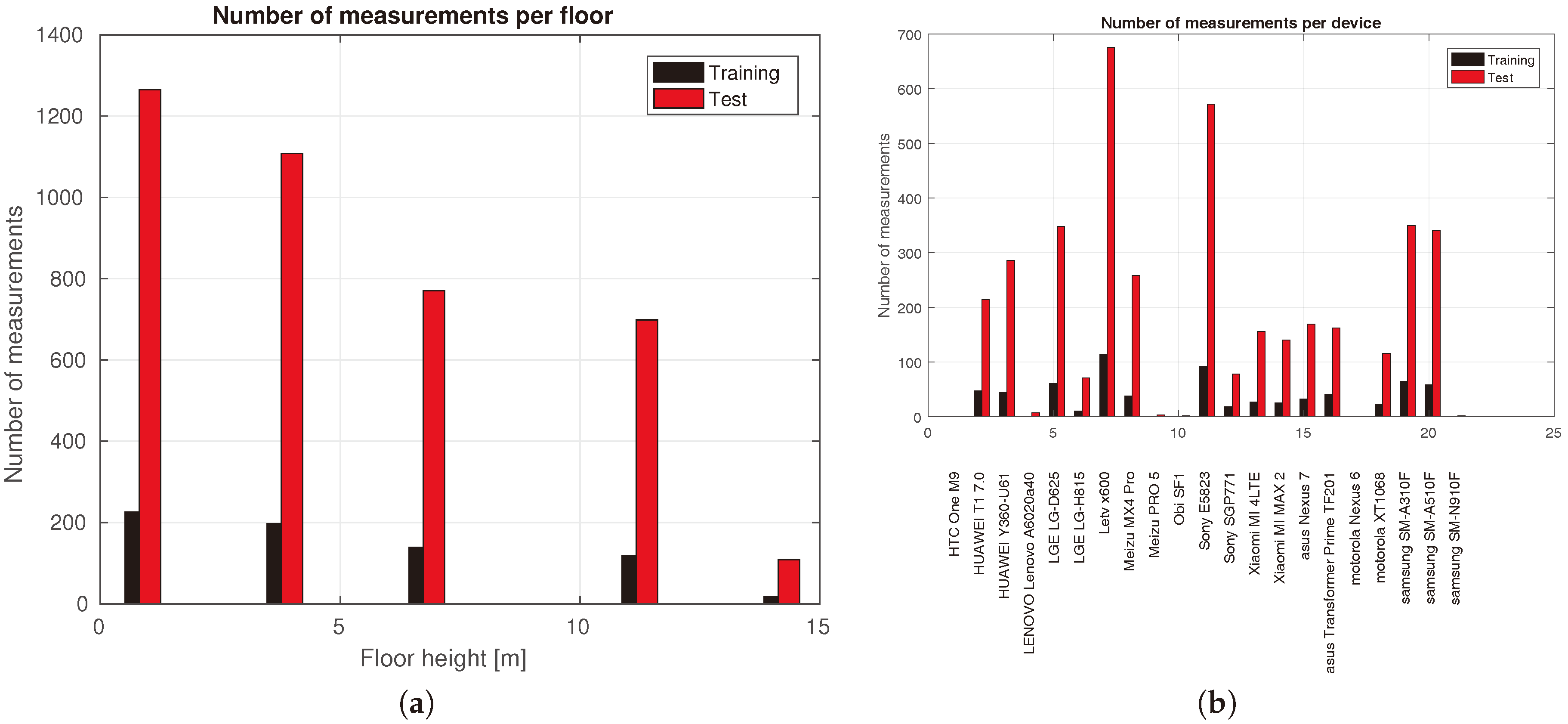
- shows examples of plots, such as the location of the measurements, the measurements distributions, per floor and per device, etc.
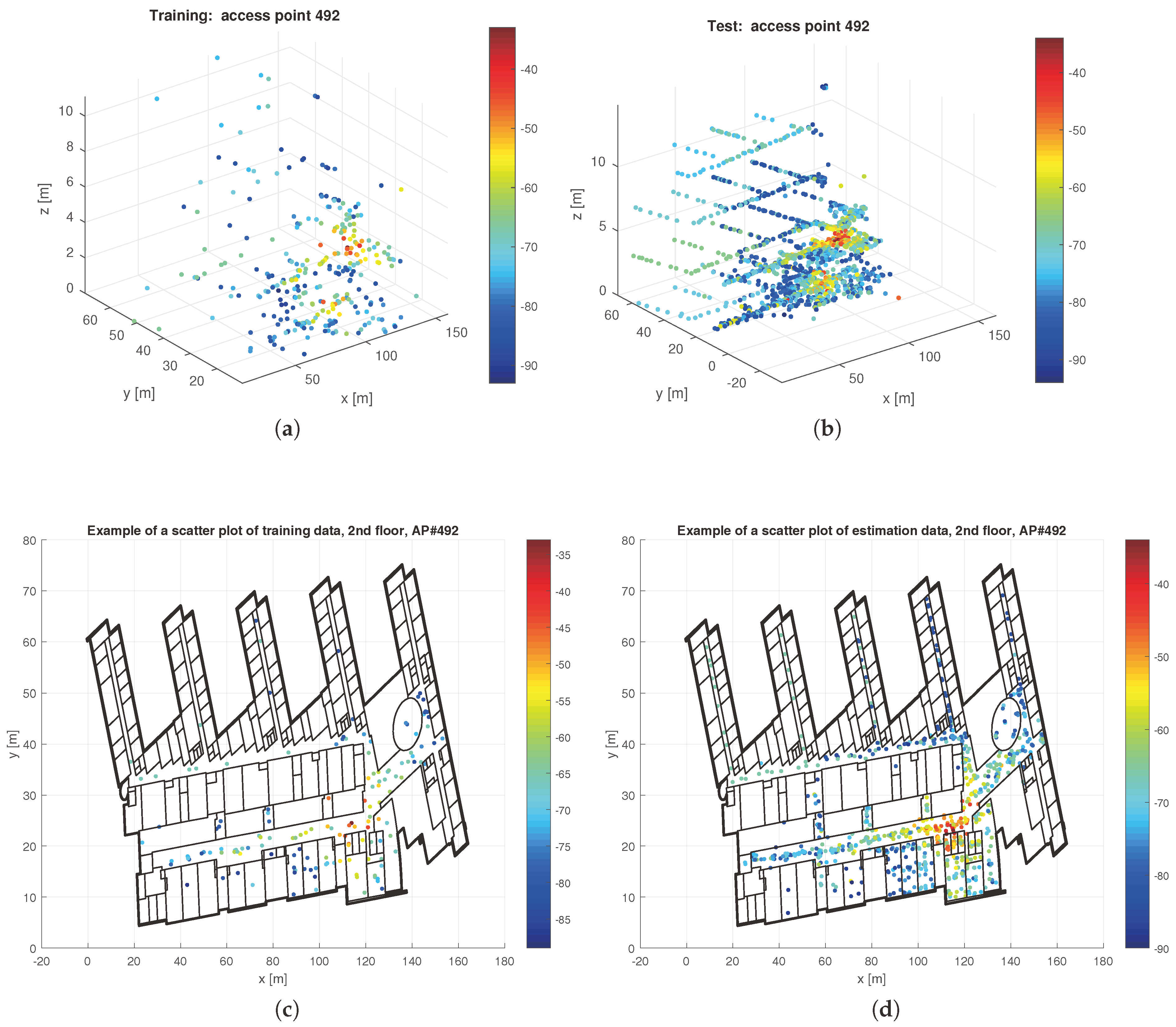
- shows examples of power maps in 2D and 3D views
- reading of the ‘csv’ training- or test data,
- different visualizations of the data, such as the location of the measurements, or examples of power maps in 2D and 3D views and
- position estimation based on two clustering and positioning algorithms described in [20].
- read the csv data and generate a struct structure with the database data
- implement three alternative representations for RSSI values
- implement eleven custom distance metrics
- remap floors
3. Materials and Methods
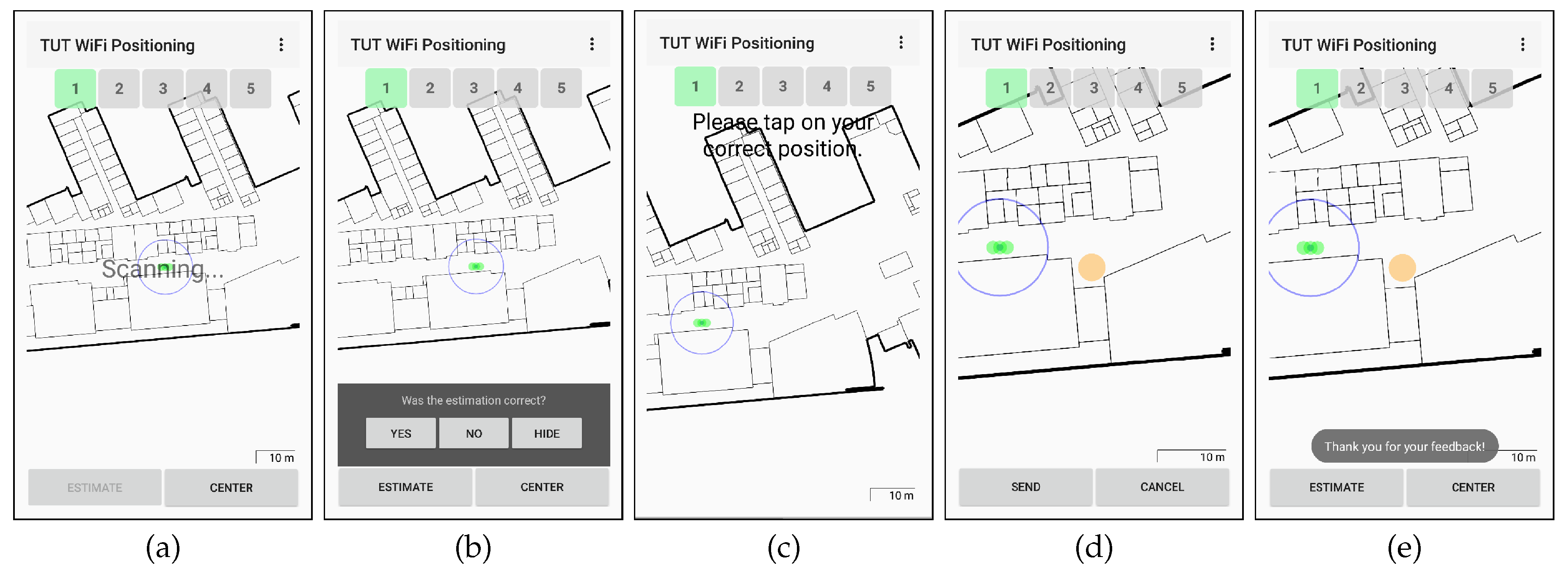
3.1. Crowdsourced Data Collection Procedure
3.2. Data Processing and Storage
3.3. Restrictions of the Availability
4. Examples of Data Use
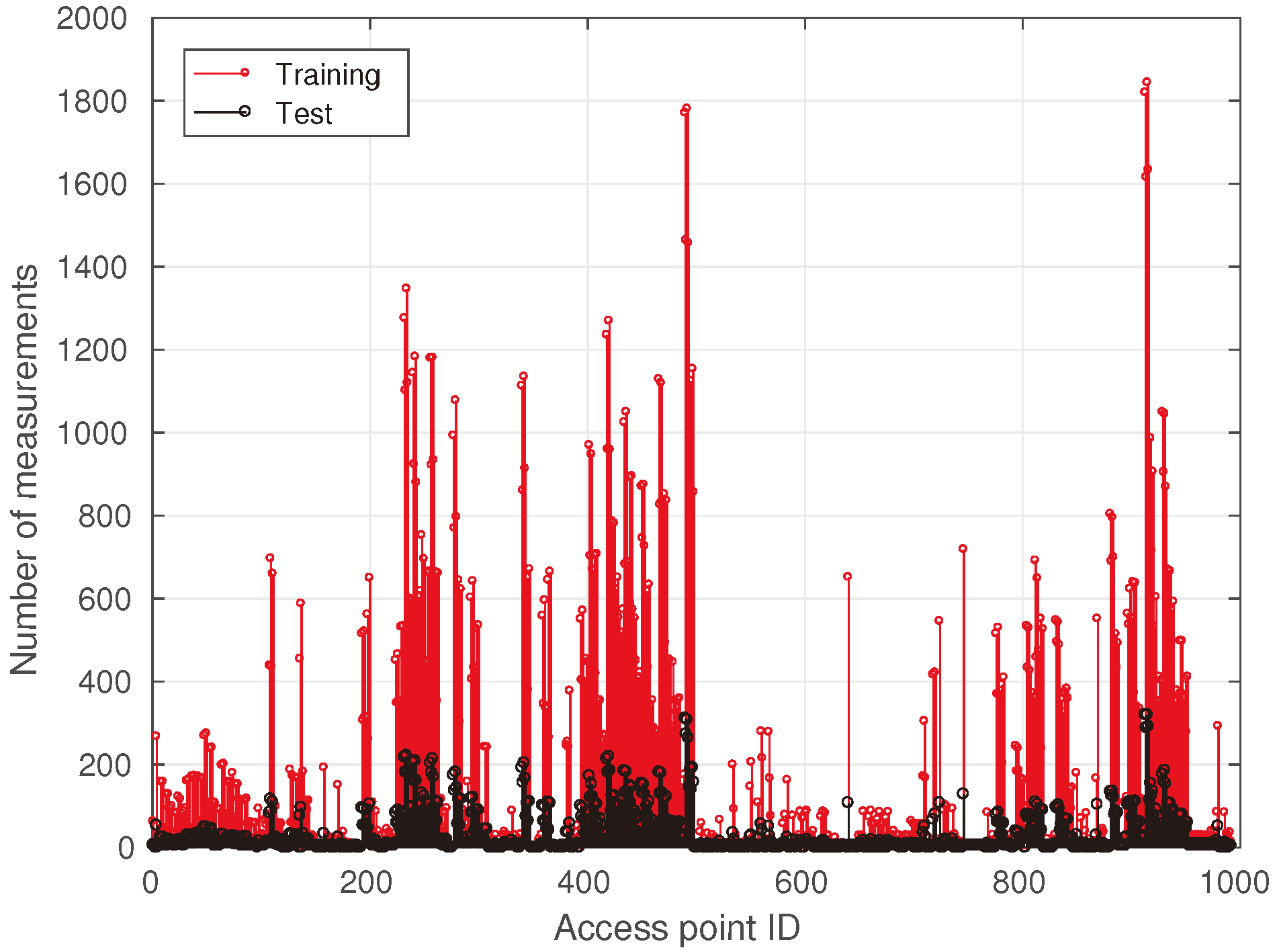
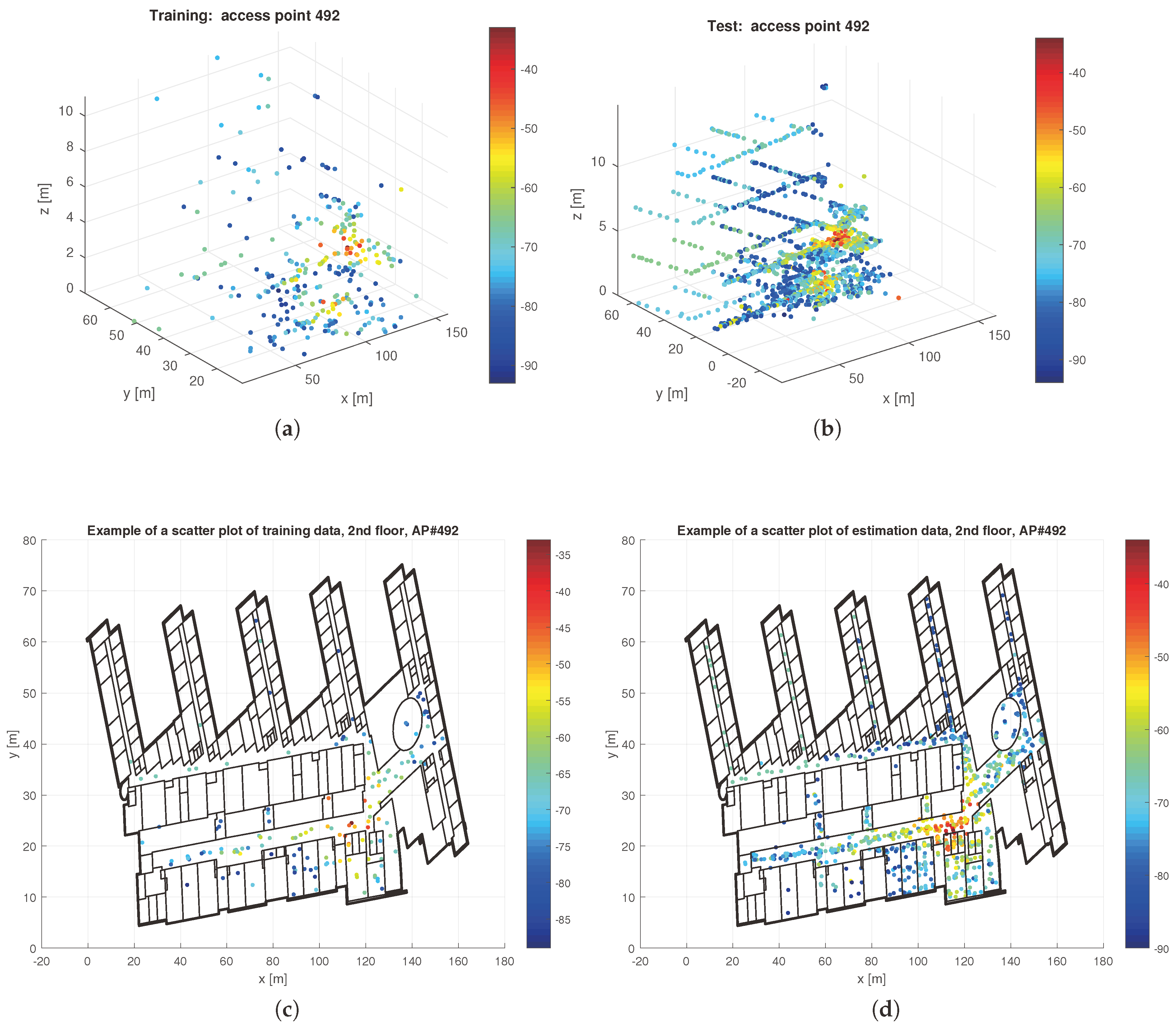
4.1. Measurement Distributions
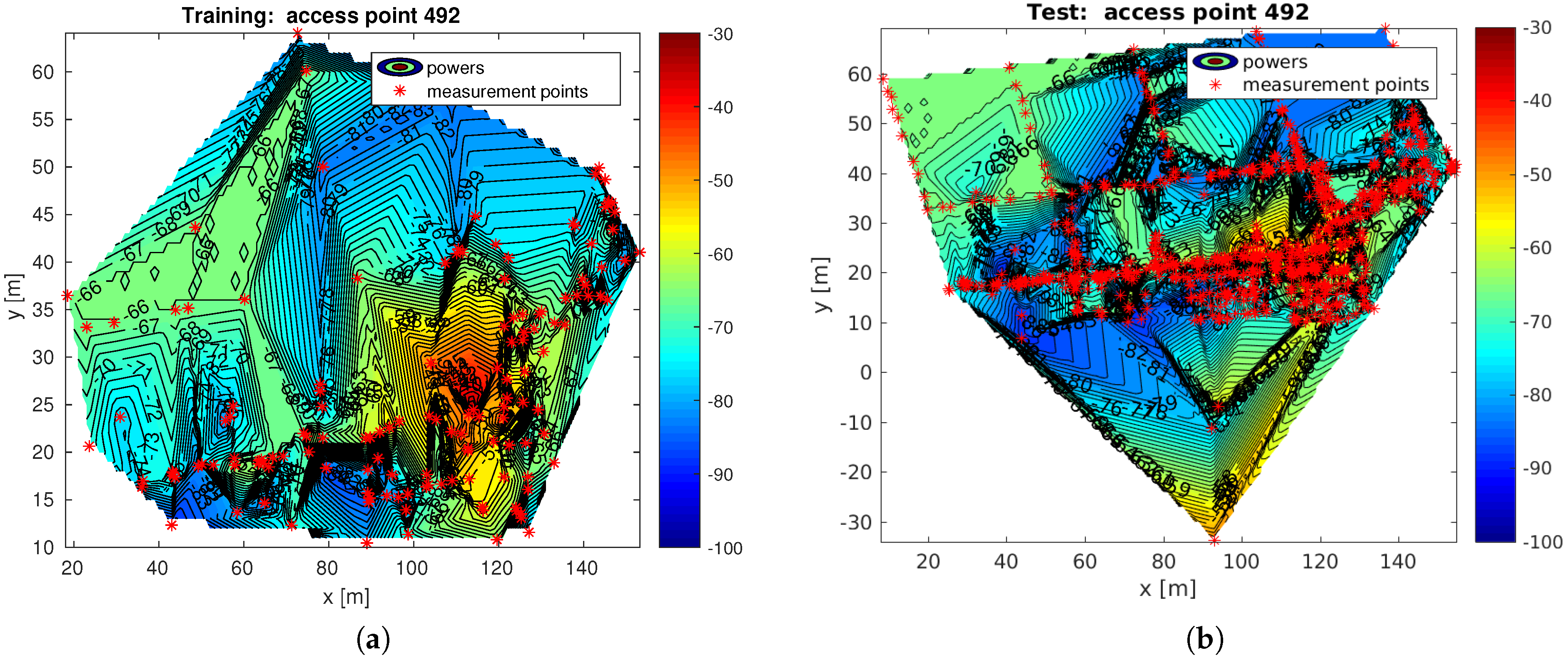
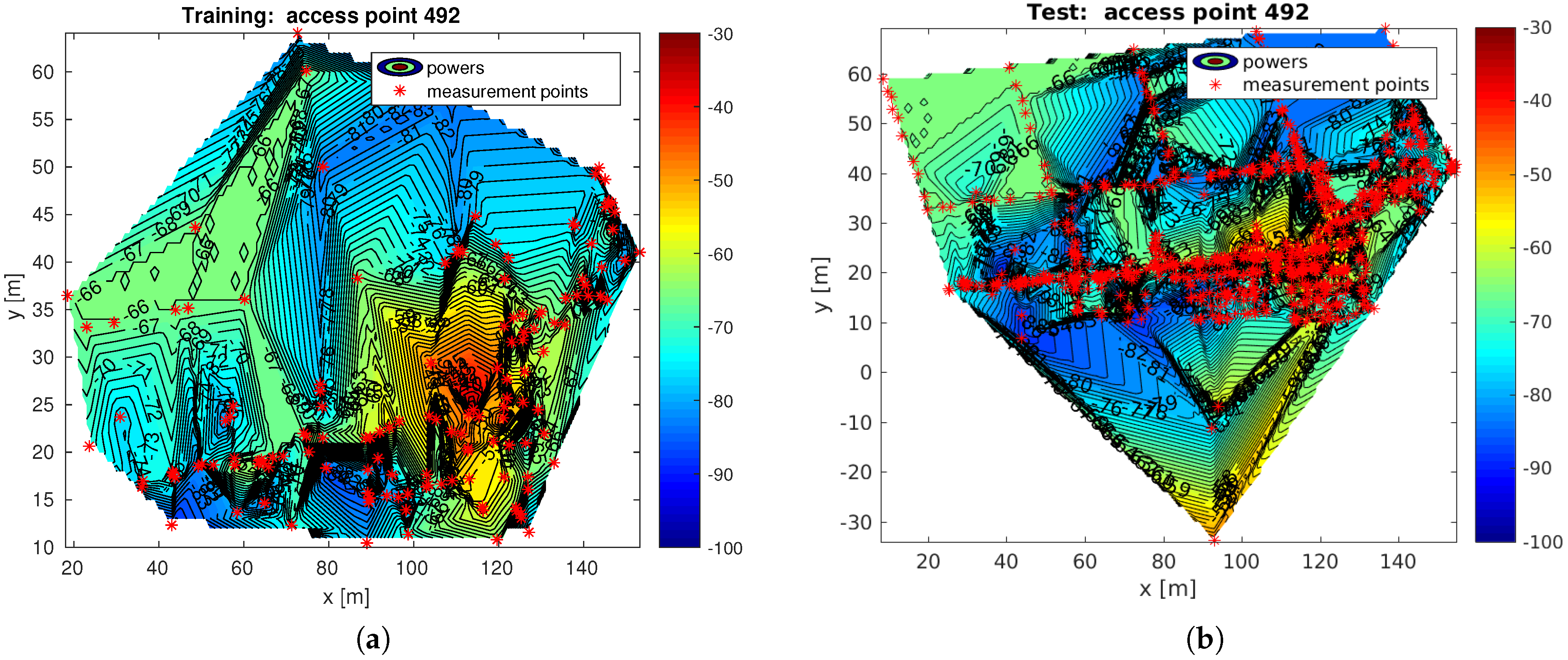
4.2. Power Maps
4.3. Benchmark Indoor Positioning Results
- 2D mean error is the error between the estimated position and the true position when the estimate is at the same floor with the true position (incorrect floor estimates are ignored here).
- 3D mean error is the 3D estimation error between the estimated 3D position and the true 3D position.
- Floor detection rate is the percentage of the test points in which the floor was estimated correctly.
- The weighted centroid algorithm described in [18]: This is one of the lowest complexity algorithms for estimating the indoor position, and it relies only on the estimated AP positions. The position estimate is the weighted centroid of the AP positions, where the weights are derived from the observed RSSs. The AP positions are, in their turn, estimated based on the training data.
- Clustering as described in [20]: This method is evaluated in two versions: on the one hand, the RSS clustering with affinity propagation and a modified log-Gaussian metric to match the RSS, and on the other hand, 3D coordinate clustering with the k-means method and the modified log-Gaussian metric. The final position, in both algorithms, is estimated by averaging over the three training positions that correspond to the three best matches.
- The UJI kNN algorithm, which is described in [21]: It is a deterministic rule based on the kNN algorithm, which includes a voting procedure to estimate the floor from the k-nearest fingerprints (or kNN-set) in the feature space. Fingerprints that do not belong to the estimated floor are removed from the kNN-set, and the final estimate is then computed as the geometric centroid of the remaining fingerprints. The algorithm considers different data representations and distance metrics to mimic the nature of radio propagation, avoid the usage of RSSI as unit-less values and consider the physical underpinning as suggested in [30].
- The RTLS@UM system at the EvAAL Competition, which is described in [31,32]: The team from University of Minho (UM), participated in the Evaluating Ambient Assisted Living (EvAAL) competition with their real time location system (RTLS). The proposed base algorithm introduced an iterative procedure to sequentially determine the building, floor and coordinates based on majority rules and kNN/wkNN. Although five slightly different alternatives were proposed, two of them have been tested in this paper according to the results provided in the competition. The proposed diversity devices filter was not applied in this database due to its marginal gain reported by the authors.
- Rank-Based Fingerprinting (RBF) is described in [33]. The RSS values measured at the operational stage are ranked according to their values, where the AP providing the strongest signal is ranked in the first position. Then, the reference ranks are generated by using the operational rank vector and the radio map. Finally, a rank comparison is performed using the Spearman’s footrule as suggested in [33]. The RSS values are replaced by the RSS ranks, since the ranks are invariant to bias and scaling.
- Coverage area-based algorithms rely on the knowledge of which ASs are heard. In their simplest form, they do not require information of the signal strengths. The idea of the pointwise-defined probabilistic coverage map is presented in [34]. The coverage areas defined as distributions were introduced in [35], and the algorithm is described in [36,37]. The location of the distribution-based coverage area is defined by the mean of the points where the AP is heard. The size and shape of the coverage area are defined by fitting the shape or covariance parameters of a probability distribution to these points. For example, Gaussian and Student distributions have an elliptical shape and can be used to define the coverage area.
5. Discussion and Conclusions
- Providing samples in a new environment where the AP deployment might highly differ from other available databases, e.g., the difference in the strategies in placing the APs, the hardware selected for APs, radiation regulations and policies about virtual APs, among many other features related to the APs.
- Providing samples in a new building where its geometry, building materials, structural elements and obstacles might highly differ from the buildings in other available databases.
- Providing samples in different conditions, e.g., density of people, and weather, among others.
- Providing samples in a building with a high number of APs (close to 1000 MAC addresses)
- Providing benchmark results with the available dataset.
- Samples are collected at random positions and orientations decided by the user, i.e., no grid-based or pre-established mapping.
- Just one sample for reference point, instead of 10, or 100, as done in other previous works.
- Different devices were used to generate the database.
- Database division is more challenging than other available Wi-Fi datasets, by having only of samples for training/reference, compared to of samples for evaluation.
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| AP | Access Point |
| EvAAL | Evaluating Ambient Assisted Living |
| FERET | Face Recognition Technology |
| IPS | Indoor Positioning System |
| UCI | University of California, Irvine |
| UJI | Universitat Jaume I |
| RTLS@UM | Real Time Location System at University of Minho |
| TUT | Technical University of Tampere |
| kNN | k-Nearest Neighbors |
| wkNN | weighted k-Nearest Neighbors |
| RSSI | Received Signal Strength Intensity |
References
- He, S.; Chan, S.H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Davidson, P.; Piché, R. A Survey of Selected Indoor Positioning Methods for Smartphones. IEEE Commun. Surv. Tutor. 2017, 19, 1347–1370. [Google Scholar] [CrossRef]
- Liu, Q.; Qiu, J.; Chen, Y. Research and development of indoor positioning. China Commun. 2016, 13, 67–79. [Google Scholar] [CrossRef]
- Zhuang, Y.; Syed, Z.; Li, Y.; El-Sheimy, N. Evaluation of Two WiFi Positioning Systems Based on Autonomous Crowdsourcing of Handheld Devices for Indoor Navigation. IEEE Trans. Mob. Comput. 2016, 15, 1982–1995. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Montoliu, R.; Usó, A.M.; Avariento, J.P.; Arnau, T.J.; Benedito-Bordonau, M.; Huerta, J. UJIIndoorLoc: A new multi-building and multi-floor database for WLAN fingerprint-based indoor localization problems. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation, Busan, Korea, 27–30 October 2014; pp. 261–270. [Google Scholar]
- Bacciu, D.; Barsocchi, P.; Chessa, S.; Gallicchio, C.; Micheli, A. An experimental characterization of reservoir computing in ambient assisted living applications. Neural Comput. Appl. 2014, 24, 1451–1464. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Montoliu, R.; Mendoza-Silva, G.M.; Belmonte, O.; Rambla, D.; Huerta, J. Providing Databases for Different Indoor Positioning Technologies: Pros and Cons of Magnetic Field and Wi-Fi Based Positioning. Mob. Inf. Syst. 2016, 2016, 6092618. [Google Scholar] [CrossRef]
- Montoliu, R.; Sansano, E.; Torres-Sospedra, J.; Belmonte, O. IndoorLoc Platform: A Public Repository for Comparing and Evaluating Indoor Positioning Systems. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Torres-Sospedra, J.; Jiménez, A.R.; Knauth, S.; Moreira, A.; Beer, Y.; Fetzer, T.; Ta, V.C.; Montoliu, R.; Seco, F.; Mendoza-Silva, G.M.; et al. The Smartphone-Based Offline Indoor Location Competition at IPIN 2016: Analysis and Future Work. Sensors 2017, 17, 557. [Google Scholar] [CrossRef] [PubMed]
- Lohan, E.; Talvitie, J. TUT Datasets. Available online: http://www.cs.tut.fi/tlt/pos/Software.htm (accessed on 29 September 2017).
- King, T.; Kopf, S.; Haenselmann, T.; Lubberger, C.; Effelsberg, W. CRAWDAD Dataset Mannheim/Compass (v. 2008-04-11). Available online: http://crawdad.org/mannheim/compass/20080411/fingerprint (accessed on 29 September 2017).
- Nahrstedt, K.; Vu, L. CRAWDAD Dataset Uiuc/Uim (v. 2012-01-24). Available online: http://crawdad.org/uiuc/uim/20120124 (accessed on 29 September 2017).
- Parasuraman, R.; Caccamo, S.; Baberg, F.; Ogren, P. CRAWDAD Dataset Kth/Rss (v. 2016-01-05). Available online: http://crawdad.org/kth/rss/20160105 (accessed on 29 September 2017).
- Guillermo, A. AIDE Project WiFi Positioning Dataset. Available online: https://zenodo.org (accessed on 29 September 2017).
- Lohan, E.; Torres-Sospedra, J.; Richter, P.; Leppäkoski, H.; Huerta, J.; Cramariuc, A. Crowdsourced WiFi- fingerprinting Database and Benchmark Software for Indoor Positioning. Available online: https://zenodo.org/record/889798 (accessed on 29 September 2017).
- Torres-Sospedra, J.; Huerta, J. GEOTEC Datasets. Available online: http://indoorloc.uji.es/ (accessed on 29 September 2017).
- Torres-Sospedra, J.; Huerta, J. GEOTEC Datasets (mirror). Available online: http://www3.uji.es/~jtorres/databases.html (accessed on 29 September 2017).
- Razavi, A.; Valkama, M.; Lohan, E.S. K-Means Fingerprint Clustering for Low-Complexity Floor Estimation in Indoor Mobile Localization. In Proceedings of the 2015 IEEE Globecom Workshops (GC Wkshps), San Diego, CA, USA, 6–10 December 2015. [Google Scholar]
- Laitinen, E. Physical Layer Challenges and Solutions in Seamless Positioning via GNSS, Cellular and WLAN Systems. Ph.D. Thesis, Tampere University of Technology, Tampere, Finland, 2017. Available online: https://tutcris.tut.fi/portal/files/10471897/laitinen_1470.pdf (accessed on 29 September 2017).
- Cramariuc, A.; Huttunen, H.; Lohan, E.S. Clustering benefits in mobile-centric WiFi positioning in multi-floor buildings. In Proceedings of the 2016 International Conference on Localization and GNSS (ICL-GNSS), Barcelona, Spain, 28–30 June 2016. [Google Scholar]
- Torres-Sospedra, J.; Montoliu, R.; Trilles, S.; Óscar, B.; Huerta, J. Comprehensive analysis of distance and similarity measures for Wi-Fi fingerprinting indoor positioning systems. Expert Syst. Appl. 2015, 42, 9263–9278. [Google Scholar] [CrossRef]
- Lott, M.; Forkel, I. A multi-wall-and-floor model for indoor radio propagation. In Proceedings of the 53rd Vehicular Technology Conference, Rhodes, Greece, 6–9 May 2001. [Google Scholar]
- Shrestha, S.; Talvitie, J.; Lohan, E.S. Deconvolution-based indoor localization with WLAN signals and unknown access point locations. In Proceedings of the 2013 International Conference on Localization and GNSS (ICL-GNSS), Turin, Italy, 25–27 June 2013. [Google Scholar]
- Lohan, E.S.; Talvitie, J.; Granados, G.S. Data fusion approaches for WiFi fingerprinting. In Proceedings of the 2016 International Conference on Localization and GNSS (ICL-GNSS), Barcelona, Spain, 28–30 June 2016; pp. 1–6. [Google Scholar]
- Talvitie, J.; Renfors, M.; Lohan, E.S. Novel Indoor Positioning Mechanism Via Spectral Compression. IEEE Commun. Lett. 2016, 20, 352–355. [Google Scholar] [CrossRef]
- Talvitie, J.; Renfors, M.; Valkama, M.; Lohan, E.S. Method and Analysis of Spectrally Compressed Radio Images for Mobile-Centric Indoor Localization. IEEE Trans. Mob. Comput. 2017, PP, 1. [Google Scholar] [CrossRef]
- UJI. IndoorLoc Platform. Available online: http://indoorlocplatform.uji.es/ (accessed on 29 September 2017).
- Talvitie, J.; Renfors, M.; Lohan, E.S. Distance-Based Interpolation and Extrapolation Methods for RSS-Based Localization With Indoor Wireless Signals. IEEE Trans. Veh. Technol. 2015, 64, 1340–1353. [Google Scholar] [CrossRef]
- Shrestha, S.; Talvitie, J.; Lohan, E.S. On the fingerprints dynamics in WLAN indoor localization. In Proceedings of the 13th International Conference on ITS Telecommunications (ITST), Tampere, Finland, 5–7 November 2013; pp. 122–126. [Google Scholar]
- Dempster, A.G.; Li, B.; Quader, I. Errors in determinstic wireless fingerprinting systems for localisation. In Proceedings of the 3rd International Symposium on Wireless Pervasive Computing, Santorini, Greece, 7–9 May 2008; pp. 111–115. [Google Scholar]
- Moreira, A.; Nicolau, M.J.; Meneses, F.; Costa, A. Wi-Fi fingerprinting in the real world - RTLS@UM at the EvAAL competition. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Calgary, AB, Canada, 13–16 October 2015. [Google Scholar]
- Torres-Sospedra, J.; Moreira, A.J.C.; Knauth, S.; Berkvens, R.; Montoliu, R.; Belmonte, O.; Trilles, S.; Nicolau, M.J.; Meneses, F.; Costa, A.; et al. A realistic evaluation of indoor positioning systems based on Wi-Fi fingerprinting: The 2015 EvAAL-ETRI competition. JAISE 2017, 9, 263–279. [Google Scholar] [CrossRef]
- Machaj, J.; Brida, P.; Piché, R. Rank based fingerprinting algorithm for indoor positioning. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation, Guimaraes, Portugal, 21–23 September 2011. [Google Scholar]
- Leppäkoski, H.; Tikkinen, S.; Takala, J. Optimizing radio map for WLAN fingerprinting. In Proceedings of the 2010 Ubiquitous Positioning Indoor Navigation and Location Based Service, Helsinki, Finland, 14–15 October 2010; pp. 1–8. [Google Scholar]
- Koski, L.; Piché, R.; Kaseva, V.; Ali-Löytty, S.; Hännikäinen, M. Positioning with coverage area estimates generated from location fingerprints. In Proceedings of the 7th Workshop on Positioning, Navigation and Communication, Dresden, Germany, 11–12 March 2010; pp. 99–106. [Google Scholar]
- Piché, R. Robust estimation of a reception region from location fingerprints. In Proceedings of the 2011 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 29–30 June 2011; pp. 31–35. [Google Scholar]
- Raitoharju, M.; Dashti, M.; Ali-Löytty, S.; Piché, R. Positioning with Multilevel Coverage Area Models. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN2012), Sydney, Australia, 13–15 November 2012. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Repository | Refs. | Main Features and Limitations |
|---|---|---|---|
| UJIIndoorLoc | UCI | [5] | Database collected at 3 different buildings with 4 floors each. A total of more than 21,000 samples was collected by means of more than 20 devices and people. The database was used in the EvAAL ETRICompetition [32]. Approximately 900 reference points were covered. A comprehensive benchmarking was not provided, but only the results with a simple 1-NN algorithm. |
| Indoor User Movement Prediction from RSS Dataset | UCI | [6] | Real-life benchmark in the area of AAL applications. The binary classification introduced predicts the pattern of user movements in real-world environments. Data, as time-series, generated by a wireless sensor network. |
| Geotec database | Personal | [7] | RSS database collected at an office with just 1 device. It is complemented by a magnetic database. The covered area is not high (≈200 m). |
| IPIN2016 Tutorial | IndoorLoc | [8] | Crowd sourced RSSI database generated by 8 students attending the IPIN 2016 tutorial. Only a small corridor was covered (≈120 m). |
| Alcalá Tutorial | IndoorLoc | [8] | The tutorial took place at the same place as the IPIN 2016 Tutorial where many student collected RSSI samples. Although the database does not contain information about the user who collected the fingerprints, the students results are provided as benchmark. Furthermore, a few RSSI measures might be incorrectly labeled on purpose to test the robustness of IPS. |
| IPIN 2016 Competition | Personal | [9] | Off-site competition that took place at the IPIN 2016 Conference. The samples were collected in 4 buildings by multiple users and multiple devices (less than 10). The database was collected with a dynamic strategy while collecting data from other sensors. Data format is complex (log files), and a parser to read the log files was provided. No SWwas provided to test the accuracy of the database, but competition results were published. |
| IPIN 2017 Competition | Personal | Off-site competition that will take place at the IPIN 2017 Conference, where 3 buildings are covered and more reference data were provided to competitors. Strengths and limitations are similar as for the 2016 competition. | |
| TUTdatasets | TUT repo | [10] | Currently, 3 available small datasets collected with one device each. |
| The Mannheimfingerprinttrace set | Crawdad | [11] | Wi-Fi-based positioning system on the second floor of an office building on the campus of the University of Mannheim. Only 221 square meters were covered, and 13 additional APs were added for localization purposes. |
| uiuc/uimdataset | Crawdad | [12] | The database contains a Wi-Fi trace file collected by 28 people for analyzing human movement. This is not a database for indoor positioning, and traces only include timestamps and hashed detected APs (position is not registered). |
| kth/rssdataset | Crawdad | [13] | The database contains the RSS data collected with a mobile robot. The package does not include a description of stored data to easily re-use them. |
| AIDEprojectrestricted dataset | Not available | [14] | Wi-Fi data for indoor location.Currently restricted to AIDE project members. |
| Algorithm | Mean 2D Error (m) | Mean 3D Error (m) | Floor Detection (%) | Reference |
|---|---|---|---|---|
| Weighted centroid | [18] | |||
| Log-Gaussian probability () | [20,23] | |||
| Log-Gaussian probability () | [20,23] | |||
| RSS clustering (affinity propagation) | [20] | |||
| 3D clustering (k-means) | [20] | |||
| UJI kNN algorithm (data=positive, dist=sorensen, ,) | [21] | |||
| UJI kNN algorithm (data=exponential, dist=neyman, ,) | [21] | |||
| UJI kNN algorithm (data=powed, dist=sorensen, ,) | [21] | |||
| RTLS@UM () | [31,32] | |||
| RTLS@UM () | [31,32] | |||
| RBF (), | [33] | |||
| Coverage area, pointwise defined (probability of AP match = ) | [34] | |||
| Coverage area, distribution based (Gaussian distribution) | [36,37] |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lohan, E.S.; Torres-Sospedra, J.; Leppäkoski, H.; Richter, P.; Peng, Z.; Huerta, J. Wi-Fi Crowdsourced Fingerprinting Dataset for Indoor Positioning. Data 2017, 2, 32. https://doi.org/10.3390/data2040032
Lohan ES, Torres-Sospedra J, Leppäkoski H, Richter P, Peng Z, Huerta J. Wi-Fi Crowdsourced Fingerprinting Dataset for Indoor Positioning. Data. 2017; 2(4):32. https://doi.org/10.3390/data2040032
Chicago/Turabian StyleLohan, Elena Simona, Joaquín Torres-Sospedra, Helena Leppäkoski, Philipp Richter, Zhe Peng, and Joaquín Huerta. 2017. "Wi-Fi Crowdsourced Fingerprinting Dataset for Indoor Positioning" Data 2, no. 4: 32. https://doi.org/10.3390/data2040032
APA StyleLohan, E. S., Torres-Sospedra, J., Leppäkoski, H., Richter, P., Peng, Z., & Huerta, J. (2017). Wi-Fi Crowdsourced Fingerprinting Dataset for Indoor Positioning. Data, 2(4), 32. https://doi.org/10.3390/data2040032