

Running Velocity and Longitudinal Bending Stiffness Influence the Asymmetry of Kinematic Variables of the Lower Limb Joints

 ,
,  , ,
, , 
Abstract
1. Introduction
2. Materials and Methods
2.1. Participants
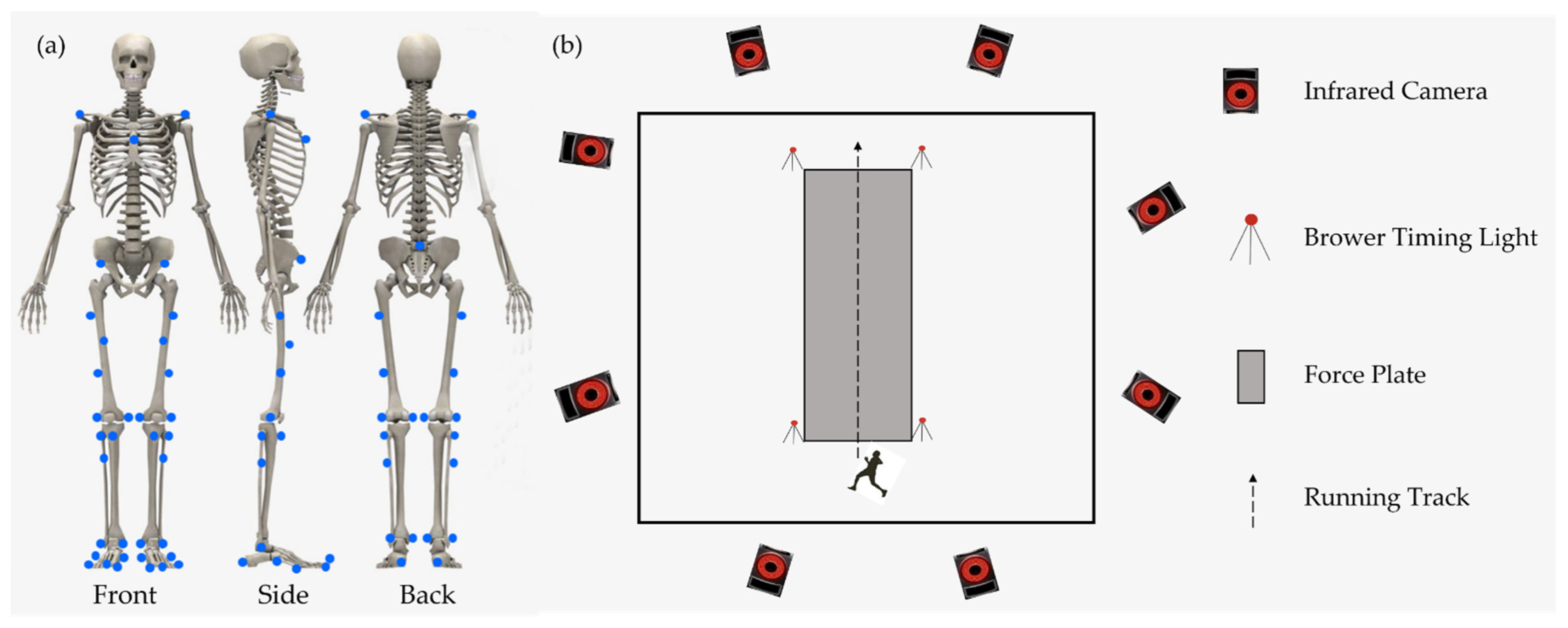
2.2. The Experimental Process
2.3. Data Analysis
2.4. Statistical Analysis
3. Results
3.1. The Influence of Running Velocity and LBS on Lower Limb Joints’ Kinematic Variables
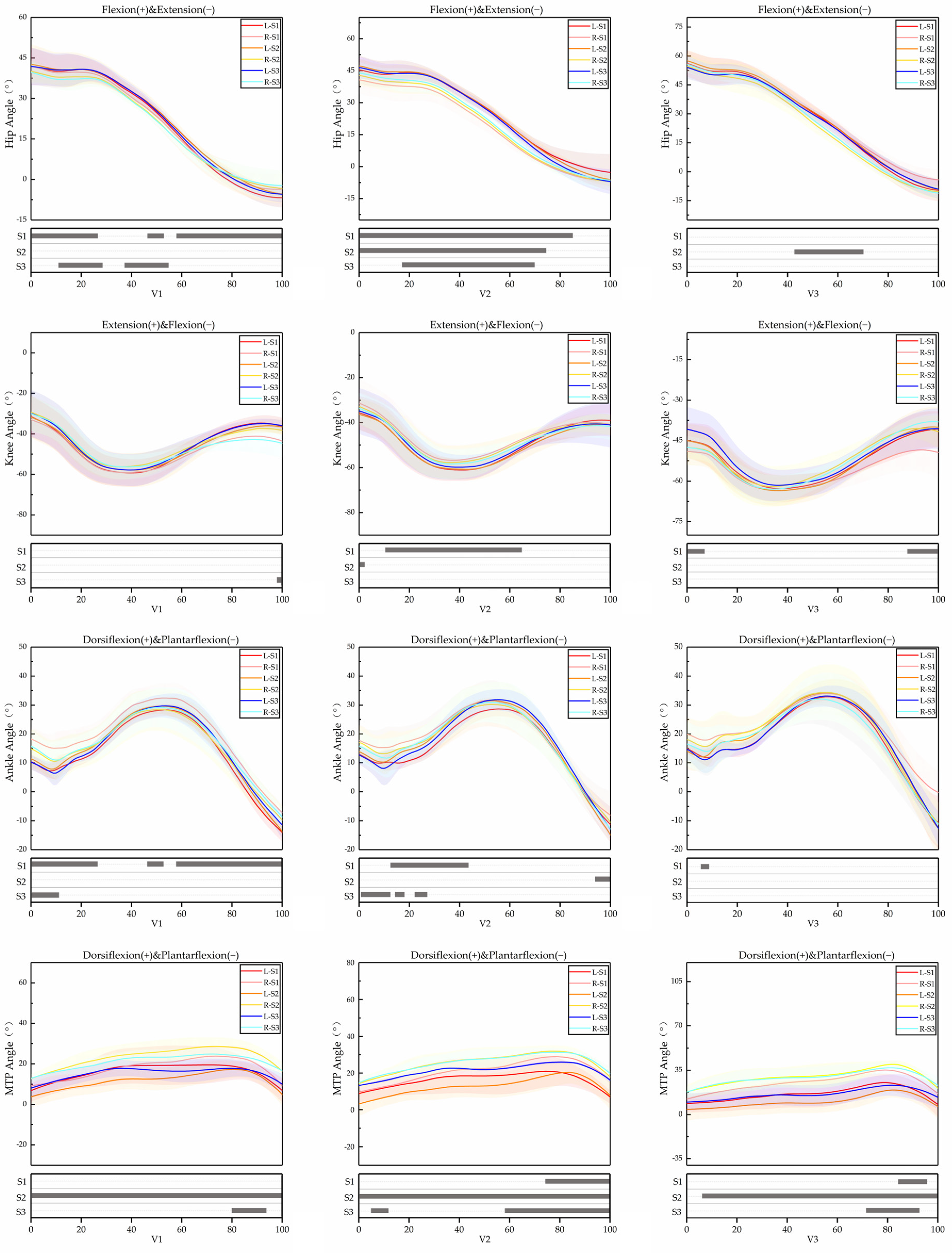
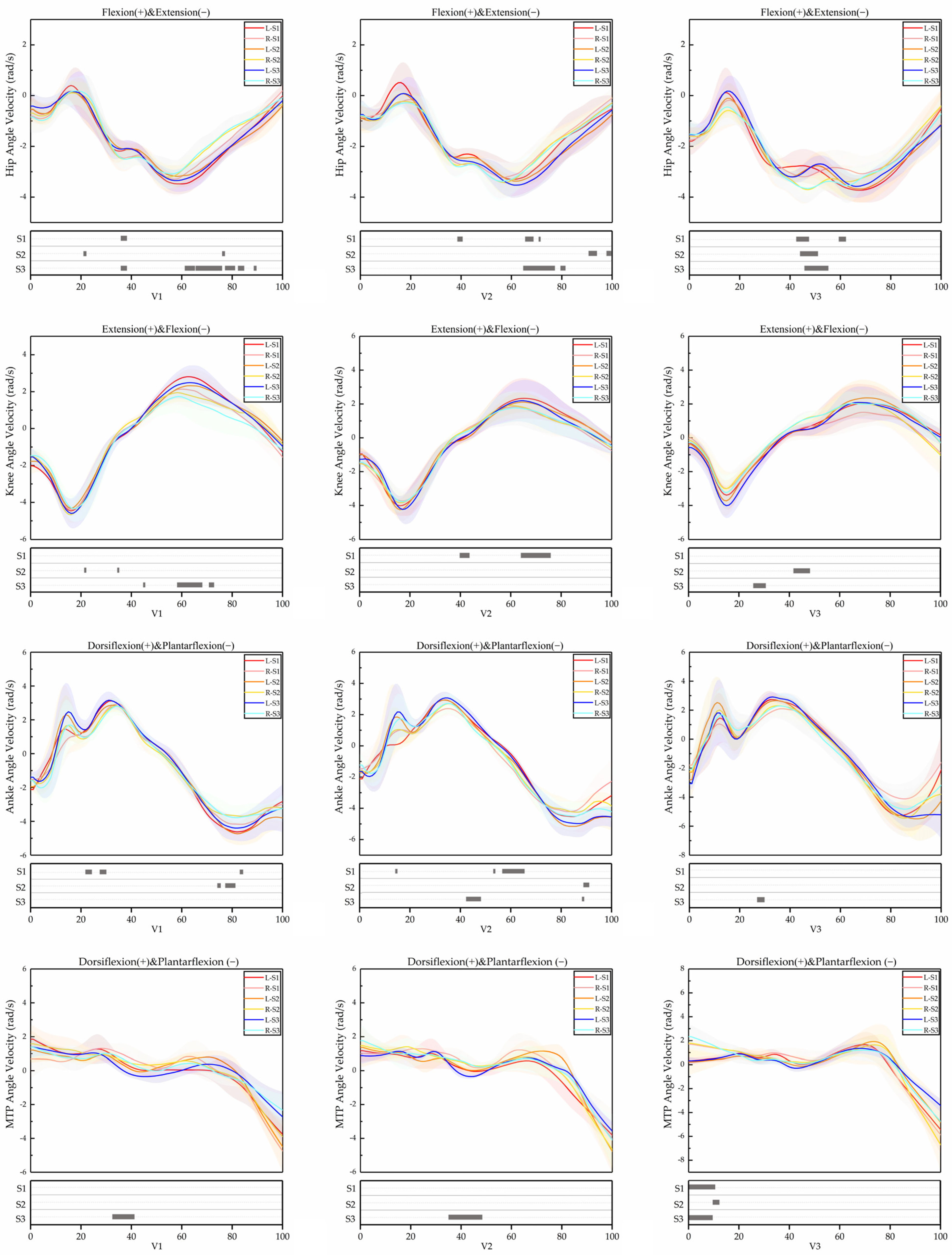
3.1.1. Hip
3.1.2. Knee
3.1.3. Ankle
3.1.4. MTP
3.1.5. SPM Results
3.2. The Influence of Running Velocity and LBS on SA
3.2.1. Running Velocity
3.2.2. LBS
3.2.3. The Interaction between Running Velocity and LBS
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Stefanyshyn, D.J.; Wannop, J.W. The influence of forefoot bending stiffness of footwear on athletic injury and performance. Footwear Sci. 2016, 8, 51–63. [Google Scholar] [CrossRef]
- Park, S.K.; Lam, W.K.; Yoon, S.; Lee, K.K.; Ryu, J. Effects of forefoot bending stiffness of badminton shoes on agility, comfort perception and lower leg kinematics during typical badminton movements. Sports Biomech. 2017, 16, 374–386. [Google Scholar] [CrossRef] [PubMed]
- Jiang, C. The Effect of Basketball Shoe Collar on Ankle Stability: A Systematic Review and Meta-Analysis. Phys. Act. Health 2020, 4, 11–18. [Google Scholar] [CrossRef]
- Wannop, J.W.; Stefanyshyn, D.J. Special issue: Bending stiffness: Performance and injury effects. Footwear Sci. 2016, 8, 49–50. [Google Scholar] [CrossRef][Green Version]
- Chen, H.; Shao, E.; Sun, D.; Xuan, R.; Baker, J.S.; Gu, Y. Effects of footwear with different longitudinal bending stiffness on biomechanical characteristics and muscular mechanics of lower limbs in adolescent runners. Front. Physiol. 2022, 8, 1499. [Google Scholar] [CrossRef] [PubMed]
- Cheung, R.T.; Ngai, S.P. Effects of footwear on running economy in distance runners: A meta-analytical review. J. Sci. Med. Sport 2016, 19, 260–266. [Google Scholar] [CrossRef]
- Roy, J.P.; Stefanyshyn, D.J. Shoe midsole longitudinal bending stiffness and running economy, joint energy, and EMG. Med. Sci. Sports Exerc. 2006, 38, 562–569. [Google Scholar] [CrossRef]
- Day, E.; Hahn, M. Optimal footwear longitudinal bending stiffness to improve running economy is speed dependent. Footwear Sci. 2020, 12, 3–13. [Google Scholar] [CrossRef]
- Radzak, K.N.; Putnam, A.M.; Tamura, K.; Hetzler, R.K.; Stickley, C.D. Asymmetry between lower limbs during rested and fatigued state running gait in healthy individuals. Gait Posture 2017, 51, 268–274. [Google Scholar] [CrossRef]
- Yen, S.C.; Olsavsky, L.C.; Cloonan, C.M.; Llanos, A.R.; Dwyer, K.J.; Nabian, M.; Farjadian, A.B. An examination of lower limb asymmetry in ankle isometric force control. Hum. Mov. Sci. 2018, 57, 40–49. [Google Scholar] [CrossRef]
- Xinyan, J.; Hairong, C.; Dong, S.; Baker, J.S.; Yaodong, G. Running speed does not influence the asymmetry of kinematic variables of the lower limb joints in novice runners. Acta Bioeng. Biomech. 2021, 23, 69–81. [Google Scholar] [CrossRef]
- Gao, Z.; Mei, Q.; Xiang, L.; Baker, J.S.; Fernandez, J.; Gu, Y. Effects of limb dominance on the symmetrical distribution of plantar loading during walking and running. Proc. Inst. Mech. Eng. Part P J. Sports Eng. Technol. 2020, 236, 17–23. [Google Scholar] [CrossRef]
- Pappas, E.; Carpes, F.P. Lower extremity kinematic asymmetry in male and female athletes performing jump-landing tasks. J. Sci. Med. Sport 2012, 15, 87–92. [Google Scholar] [CrossRef]
- Paterno, M.V.; Schmitt, L.C.; Ford, K.R.; Rauh, M.J.; Myer, G.D.; Huang, B.; Hewett, T.E. Biomechanical measures during landing and postural stability predict second anterior cruciate ligament injury after anterior cruciate ligament reconstruction and return to sport. Am. J. Sports Med. 2010, 38, 1968–1978. [Google Scholar] [CrossRef] [PubMed]
- Girard, O.; Morin, J.-B.; Ryu, J.; Read, P.; Townsend, N. Running velocity does not influence lower limb mechanical asymmetry. Front. Sports Act. Living 2019, 1, 36. [Google Scholar] [CrossRef]
- Gao, Z.; Mei, Q.; Fekete, G.; Baker, J.S.; Gu, Y. The Effect of Prolonged Running on the Symmetry of Biomechanical Variables of the Lower Limb Joints. Symmetry 2020, 12, 720. [Google Scholar] [CrossRef]
- Karatel, M.; Yagci, G.; Yakut, Y. Investigation of multidirectional hip range of motion and hip motion asymmetry in individuals with idiopathic scoliosis with different curve patterns. J. Bodyw. Mov. Ther. 2021, 27, 77–83. [Google Scholar] [CrossRef]
- Kotwicki, T.; Walczak, A.; Szulc, A. Trunk rotation and hip joint range of rotation in adolescent girls with idiopathic scoliosis: Does the “dinner plate” turn asymmetrically? Scoliosis 2008, 3, 1. [Google Scholar] [CrossRef]
- Renner, K.E.; Franck, C.T.; Miller, T.K.; Queen, R.M. Limb asymmetry during recovery from anterior cruciate ligament reconstruction. J. Orthop. Res.® 2018, 36, 1887–1893. [Google Scholar] [CrossRef]
- Sadeghi, H.; Allard, P.; Prince, F.; Labelle, H. Symmetry and limb dominance in able-bodied gait: A review. Gait Posture 2000, 12, 34–45. [Google Scholar] [CrossRef]
- Mo, S.; Lau, F.O.Y.; Lok, A.K.Y.; Chan, Z.Y.S.; Zhang, J.H.; Shum, G.; Cheung, R.T.H. Bilateral asymmetry of running gait in competitive, recreational and novice runners at different speeds. Hum. Mov. Sci. 2020, 71, 102600. [Google Scholar] [CrossRef] [PubMed]
- Healey, L.A.; Hoogkamer, W. Longitudinal bending stiffness does not affect running economy in Nike Vaporfly Shoes. J. Sport Health Sci. 2022, 11, 285–292. [Google Scholar] [CrossRef] [PubMed]
- Ortega, J.A.; Healey, L.A.; Swinnen, W.; Hoogkamer, W. Energetics and Biomechanics of Running Footwear with Increased Longitudinal Bending Stiffness: A Narrative Review. Sports Med. 2021, 51, 873–894. [Google Scholar] [CrossRef] [PubMed]
- Tartibian, B.; Malandish, A.; Afsargharehbagh, R.; Eslami, R.; Sheikhlou, Z. Assessment of hepatic and lipid profiles following 12 weeks of aerobic exercise in overweight postmenopausal women. Int. J. Basic Sci. Med. 2018, 3, 159–167. [Google Scholar] [CrossRef]
- Delp, S.L.; Loan, J.P.; Hoy, M.G.; Zajac, F.E.; Topp, E.L.; Rosen, J.M. An interactive graphics-based model of the lower extremity to study orthopaedic surgical procedures. IEEE Trans. Biomed. Eng. 1990, 37, 757–767. [Google Scholar] [CrossRef]
- Saragiotto, B.T.; Yamato, T.P.; Lopes, A.D. What do recreational runners think about risk factors for running injuries? A descriptive study of their beliefs and opinions. J. Orthop. Sports Phys. Ther. 2014, 44, 733–738. [Google Scholar] [CrossRef]
- Monte, A.; Baltzopoulos, V.; Maganaris, C.N.; Zamparo, P. Gastrocnemius Medialis and Vastus Lateralis in vivo muscle-tendon behavior during running at increasing speeds. Scand. J. Med. Sci. Sports 2020, 30, 1163–1176. [Google Scholar] [CrossRef]
- Sinclair, J.; Selfe, J. Sex differences in knee loading in recreational runners. J. Biomech. 2015, 48, 2171–2175. [Google Scholar] [CrossRef]
- Zhou, H.; Xu, D.; Quan, W.; Liang, M.; Ugbolue, U.C.; Baker, J.S.; Gu, Y. A Pilot Study of Muscle Force between Normal Shoes and Bionic Shoes during Men Walking and Running Stance Phase Using Opensim. Actuators 2021, 10, 274. [Google Scholar] [CrossRef]
- Zifchock, R.A.; Davis, I.; Higginson, J.; Royer, T. The symmetry angle: A novel, robust method of quantifying asymmetry. Gait Posture 2008, 27, 622–627. [Google Scholar] [CrossRef]
- Lu, Z.; Li, X.; Xuan, R.; Song, Y.; Bíró, I.; Liang, M.; Gu, Y. Effect of Heel Lift Insoles on Lower Extremity Muscle Activation and Joint Work during Barbell Squats. Bioengineering 2022, 9, 301. [Google Scholar] [CrossRef] [PubMed]
- Flores, N.; Delattre, N.; Berton, E.; Rao, G. Does an increase in energy return and/or longitudinal bending stiffness shoe features reduce the energetic cost of running? Eur. J. Appl. Physiol. 2019, 119, 429–439. [Google Scholar] [CrossRef] [PubMed]
- Day, E.M.; Hahn, M.E. Does running speed affect the response of joint level mechanics in non-rearfoot strike runners to footwear of varying longitudinal bending stiffness? Gait Posture 2021, 84, 187–191. [Google Scholar] [CrossRef]
- Pataky, T.C. One-dimensional statistical parametric mapping in Python. Comput. Methods Biomech. Biomed. Eng. 2012, 15, 295–301. [Google Scholar] [CrossRef] [PubMed]
- Hannah, R.; Morrison, J.; Chapman, A. Kinematic symmetry of the lower limbs. Arch. Phys. Med. Rehabil. 1984, 65, 155–158. [Google Scholar] [PubMed]
- Dellagrana, R.A.; Diefenthaeler, F.; Carpes, F.P.; Hernandez, S.G.; de Campos, W. Evidence for isokinetic knee torque asymmetries in male long distance-trained runners. Int. J. Sports Phys. Ther. 2015, 10, 514. [Google Scholar]
- Higashihara, A.; Ono, T.; Kubota, J.; Okuwaki, T.; Fukubayashi, T. Functional differences in the activity of the hamstring muscles with increasing running speed. J. Sports Sci. 2010, 28, 1085–1092. [Google Scholar] [CrossRef]
- Thakre, P.S.; Zakiuddin, K.S.; Khan, I.A.; Faizan, M.S. Finite element analysis of tibia bone. Int. J. Biomed. Eng. Technol. 2021, 35, 318–339. [Google Scholar] [CrossRef]
- Dempster, J.; Dutheil, F.; Ugbolue, U.C. The Prevalence of Lower Extremity Injuries in Running and Associated Risk Factors: A Systematic Review. Phys. Act. Health 2021, 5, 133–145. [Google Scholar] [CrossRef]
- Tiwari, A.; Singh, O.P.; Bhatia, D. A review on motor neuron disabilities and treatments. Int. J. Biomed. Eng. Technol. 2021, 37, 154–175. [Google Scholar] [CrossRef]
- Wafai, L.; Zayegh, A.; Woulfe, J.; Aziz, S.M.; Begg, R. Identification of foot pathologies based on plantar pressure asymmetry. Sensors 2015, 15, 20392–20408. [Google Scholar] [CrossRef] [PubMed]
- Nagel, A.; Fernholz, F.; Kibele, C.; Rosenbaum, D. Long distance running increases plantar pressures beneath the metatarsal heads: A barefoot walking investigation of 200 marathon runners. Gait Posture 2008, 27, 152–155. [Google Scholar] [CrossRef] [PubMed]
- Pg Damit, D.N.F.; Senanayake, S.M.N.A.; Malik, O.A.; Tuah, N.J. Integrated neuromuscular fatigue analysis system for soldiers’ load carriage trial using DWT. Int. J. Biomed. Eng. Technol. 2021, 35, 1–18. [Google Scholar] [CrossRef]
- Merry, C.; Baker, J.S.; Dutheil, F.; Ugbolue, U.C. Do Kinematic Study Assessments Improve Accuracy & Precision in Golf Putting? A Comparison between Elite and Amateur Golfers: A Systematic Review and Meta-Analysis. Phys. Act. Health 2022, 6, 108–123. [Google Scholar]
- Xu, D.; Quan, W.; Zhou, H.; Sun, D.; Baker, J.S.; Gu, Y. Explaining the differences of gait patterns between high and low-mileage runners with machine learning. Sci. Rep. 2022, 12, 2981. [Google Scholar] [CrossRef]
- Willwacher, S.; König, M.; Braunstein, B.; Goldmann, J.-P.; Brüggemann, G.-P. The gearing function of running shoe longitudinal bending stiffness. Gait Posture 2014, 40, 386–390. [Google Scholar] [CrossRef]
- De Ruiter, C.J.; Van Daal, S.; Van Dieën, J.H. Individual optimal step frequency during outdoor running. Eur. J. Sport Sci. 2020, 20, 182–190. [Google Scholar] [CrossRef]
- Xiang, L.; Mei, Q.; Wang, A.; Shim, V.; Fernandez, J.; Gu, Y. Evaluating function in the hallux valgus foot following a 12-week minimalist footwear intervention: A pilot computational analysis. J. Biomech. 2022, 132, 110941. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| S1 | S2 | S3 | |
|---|---|---|---|
| LBS value (Nm/rad) | 2.7 | 5.0 | 8.6 |
| Appearance |  |  |  |
| Joint Kinematics | S1 | p-Value | S2 | p-Value | S3 | p-Value | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| L | R | L | R | L | R | ||||||
| Hip | Extension angle (◦) | V1 | 49.07 ± 10.11 | 44.01 ± 8.92 | 0.033 | 48.27 ± 9.11 | 41.90 ± 7.83 | 0.010 | 47.56 ± 9.83 | 40.28 ± 8.50 | <0.001 |
| V2 | 48.71 ± 14.84 | 46.05 ± 10.95 | 0.094 | 53.79 ± 2.46 | 50.15 ± 8.82 | 0.213 | 53.84 ± 10.39 | 50.80 ± 9.41 | 0.037 | ||
| V3 | 66.87 ± 7.29 | 61.32 ± 10.41 | 0.142 | 67.94 ± 7.58 | 66.06 ± 9.41 | 0.451 | 63.99 ± 8.34 | 67.77 ± 7.39 | 0.287 | ||
| Extension angle velocity (rad/s) | V1 | 6.47 ± 0.44 | 6.16 ± 0.97 | 0.433 | 5.97 ± 0.23 | 6.18 ± 0.46 | 0.130 | 6.05 ± 0.33 | 5.94 ± 0.49 | 0.595 | |
| V2 | 6.99 ± 0.66 | 6.99 ± 0.56 | 0.977 | 7.12 ± 0.60 | 6.99 ± 0.48 | 0.699 | 7.61 ± 0.48 | 6.90 ± 0.65 | 0.004 | ||
| V3 | 9.75 ± 0.88 | 9.37 ± 0.97 | 0.519 | 9.49 ± 0.60 | 9.42 ± 0.50 | 0.818 | 9.13 ± 0.93 | 9.45 ± 0.52 | 0.434 | ||
| Knee | Flexion angle (◦) | V1 | 29.10 ± 4.19 | 27.36 ± 4.34 | 0.135 | 26.98 ± 2.45 | 27.75 ± 2.67 | 0.215 | 28.77 ± 3.97 | 28.06 ± 4.85 | 0.689 |
| V2 | 26.20 ± 3.03 | 26.37 ± 4.63 | 0.864 | 25.22 ± 3.52 | 25.95 ± 1.41 | 0.573 | 26.49 ± 6.02 | 25.49 ± 2.44 | 0.653 | ||
| V3 | 18.13 ± 2.57 | 15.58 ± 4.22 | 0.012 | 19.01 ± 2.07 | 15.01 ± 2.35 | 0.003 | 21.38 ± 3.05 | 15.99 ± 2.86 | 0.007 | ||
| Extension angle (◦) | V1 | 25.06 ± 8.81 | 19.03 ± 9.29 | 0.005 | 22.16 ± 7.37 | 19.23 ± 5.52 | 0.034 | 23.04 ± 7.62 | 15.91 ± 8.35 | <0.001 | |
| V2 | 22.56 ± 11.36 | 17.80 ± 10.78 | 0.002 | 20.16 ± 4.55 | 18.28 ± 9.88 | 0.488 | 20.70 ± 12.14 | 17.66 ± 11.39 | 0.014 | ||
| V3 | 22.22 ± 10.78 | 16.42 ± 10.89 | 0.007 | 23.97 ± 10.73 | 22.70 ± 10.66 | 0.632 | 21.21 ± 9.76 | 25.48 ± 6.60 | 0.192 | ||
| Flexion angle velocity (rad/s) | V1 | 4.99 ± 1.06 | 4.12 ± 1.47 | 0.058 | 4.28 ± 1.14 | 4.32 ± 1.28 | 0.938 | 4.51 ± 1.11 | 3.37 ± 1.28 | 0.003 | |
| V2 | 9.39 ± 1.67 | 8.30 ± 1.83 | 0.063 | 8.93 ± 1.66 | 8.31 ± 0.58 | 0.276 | 9.58 ± 2.72 | 8.02 ± 0.56 | 0.122 | ||
| V3 | 9.30 ± 2.79 | 8.38 ± 2.54 | 0.482 | 9.72 ± 2.41 | 8.13 ± 1.90 | 0.236 | 10.73 ± 2.18 | 8.12 ± 2.18 | 0.065 | ||
| Extension angle velocity (rad/s) | V1 | 4.99 ± 1.06 | 4.12 ± 1.47 | 0.058 | 4.28 ± 1.14 | 4.32 ± 1.28 | 0.938 | 4.51 ± 1.11 | 3.37 ± 1.28 | 0.003 | |
| V2 | 4.67 ± 1.91 | 3.91 ± 1.45 | 0.008 | 4.33 ± 0.88 | 3.86 ± 1.10 | 0.205 | 4.53 ± 2.06 | 3.62 ± 1.47 | 0.002 | ||
| V3 | 5.38 ± 2.09 | 4.28 ± 1.87 | 0.027 | 5.98 ± 2.20 | 5.13 ± 1.56 | 0.251 | 5.32 ± 2.01 | 5.56 ± 0.99 | 0.700 | ||
| Ankle | Dorsiflexion angle (◦) | V1 | 24.30 ± 2.10 | 18.25 ± 1.57 | <0.001 | 22.34 ± 1.89 | 18.53 ± 0.98 | 0.001 | 23.87 ± 1.71 | 18.78 ± 0.92 | <0.001 |
| V2 | 19.61 ± 2.23 | 17.28 ± 1.66 | 0.004 | 22.09 ± 3.41 | 17.66 ± 1.52 | 0.017 | 23.99 ± 2.21 | 19.74 ± 1.16 | 0.001 | ||
| V3 | 21.43 ± 3.53 | 17.34 ± 1.72 | 0.011 | 23.04 ± 3.10 | 19.34 ± 1.83 | 0.030 | 22.54 ± 2.35 | 19.14 ± 1.62 | 0.004 | ||
| Plantarflexion angle (◦) | V1 | 42.45 ± 4.62 | 39.90 ± 4.01 | 0.048 | 43.59 ± 4.42 | 38.43 ± 4.79 | 0.005 | 41.11 ± 5.91 | 38.12 ± 4.97 | 0.096 | |
| V2 | 40.01 ± 8.02 | 39.89 ± 5.68 | 0.967 | 46.45 ± 1.60 | 40.94 ± 6.34 | 0.047 | 44.88 ± 5.35 | 44.01 ± 4.92 | 0.491 | ||
| V3 | 43.53 ± 8.80 | 34.87 ± 6.39 | 0.073 | 47.37 ± 7.95 | 45.66 ± 9.13 | 0.714 | 46.00 ± 4.77 | 43.67 ± 7.91 | 0.552 | ||
| Dorsiflexion angle velocity (rad/s) | V1 | 6.12 ± 0.71 | 5.71 ± 0.79 | 0.323 | 7.37 ± 2.13 | 7.24 ± 2.05 | 0.764 | 8.23 ± 2.57 | 7.10 ± 1.87 | 0.038 | |
| V2 | 6.14 ± 0.72 | 6.07 ± 1.43 | 0.897 | 8.50 ± 2.71 | 6.69 ± 1.34 | 0.048 | 8.67 ± 2.94 | 8.28 ± 2.79 | 0.616 | ||
| V3 | 8.32 ± 2.99 | 7.31 ± 1.59 | 0.343 | 9.75 ± 3.68 | 8.80 ± 2.03 | 0.293 | 10.19 ± 3.65 | 9.26 ± 3.33 | 0.530 | ||
| Plantarflexion angle velocity (rad/s) | V1 | 8.52 ± 0.52 | 7.80 ± 0.66 | 0.127 | 8.69 ± 0.65 | 7.38 ± 0.51 | 0.003 | 8.14 ± 0.80 | 7.45 ± 0.84 | 0.138 | |
| V2 | 10.07 ± 1.53 | 9.15 ± 0.70 | 0.134 | 11.26 ± 1.10 | 8.77 ± 0.62 | 0.001 | 11.41 ± 1.13 | 9.65 ± 0.46 | <0.001 | ||
| V3 | 13.20 ± 2.64 | 11.49 ± 2.16 | 0.172 | 14.73 ± 2.37 | 13.55 ± 1.82 | 0.321 | 15.29 ± 3.24 | 12.73 ± 1.97 | 0.124 | ||
| MTP | Dorsiflexion angle (◦) | V1 | 15.03 ± 3.82 | 15.90 ± 3.89 | 0.614 | 14.91 ± 2.05 | 17.20 ± 4.22 | 0.059 | 11.56 ± 1.67 | 13.40 ± 1.33 | 0.046 |
| V2 | 13.63 ± 4.15 | 20.11 ± 1.88 | <0.001 | 18.10 ± 3.30 | 19.45 ± 2.18 | 0.420 | 13.10 ± 0.86 | 18.60 ± 2.55 | <0.001 | ||
| V3 | 16.95 ± 3.68 | 25.28 ± 2.29 | <0.001 | 15.85 ± 6.10 | 24.57 ± 4.20 | 0.020 | 13.67 ± 4.22 | 22.17 ± 1.89 | <0.001 | ||
| Plantarflexion angle (◦) | V1 | 14.05 ± 4.09 | 15.65 ± 4.42 | 0.534 | 13.29 ± 3.37 | 12.60 ± 3.47 | 0.621 | 8.86 ± 3.67 | 8.88 ± 2.34 | 0.988 | |
| V2 | 14.84 ± 5.37 | 13.08 ± 6.00 | 0.608 | 12.82 ± 2.53 | 15.30 ± 2.76 | 0.011 | 9.89 ± 1.84 | 12.72 ± 2.70 | 0.050 | ||
| V3 | 17.71 ± 5.40 | 19.89 ± 7.04 | 0.454 | 13.53 ± 7.40 | 20.37 ± 3.02 | 0.013 | 9.77 ± 1.64 | 14.83 ± 5.49 | 0.020 | ||
| Dorsiflexion angle velocity (rad/s) | V1 | 3.53 ± 0.72 | 3.53 ± 0.49 | 0.985 | 2.81 ± 0.73 | 3.78 ± 2.46 | 0.205 | 2.83 ± 0.68 | 3.35 ± 0.63 | 0.214 | |
| V2 | 3.53 ± 0.72 | 3.53 ± 0.49 | 0.985 | 2.81 ± 0.73 | 3.78 ± 2.46 | 0.205 | 2.83 ± 0.68 | 3.35 ± 0.63 | 0.214 | ||
| V3 | 5.18 ± 2.08 | 6.05 ± 1.03 | 0.226 | 5.33 ± 1.90 | 7.99 ± 1.55 | 0.004 | 3.82 ± 1.16 | 6.96 ± 2.53 | 0.001 | ||
| Plantarflexion angle velocity (rad/s) | V1 | 6.66 ± 1.80 | 8.44 ± 1.58 | 0.039 | 8.00 ± 2.76 | 7.13 ± 1.68 | 0.360 | 4.84 ± 2.61 | 4.23 ± 1.32 | 0.618 | |
| V2 | 7.57 ± 1.01 | 8.14 ± 3.59 | 0.662 | 9.50 ± 2.42 | 8.83 ± 1.99 | 0.587 | 6.59 ± 0.99 | 7.65 ± 2.05 | 0.155 | ||
| V3 | 12.84 ± 4.62 | 15.06 ± 3.57 | 0.236 | 11.31 ± 4.79 | 15.73 ± 3.14 | 0.064 | 8.29 ± 1.64 | 11.16 ± 2.82 | 0.022 | ||
| Joint Kinematics | Symmetry Angle [%] | V | S | V·S | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| S1 | S2 | S3 | p | F | η2 | p | F | η2 | p | F | η2 | |||
| Hip | Extension | V1 | 4.92 ± 2.75 | 5.22 ± 3.85 | 5.27 ± 2.40 | 0.077 | 2.650 | 0.061 | 0.920 | 0.084 | 0.002 | 0.215 | 1.480 | 0.068 |
| V2 | 2.49 ± 1.40 | 4.90 ± 3.35 | 2.58 ± 1.91 | |||||||||||
| V3 | 4.93 ± 4.16 | 3.03 ± 1.94 | 4.42 ± 3.18 | |||||||||||
| Extension angle velocity | V1 | 5.35 ± 3.44 | 1.95 ± 1.06 | 2.50 ± 2.02 | 0.702 | 0.355 | 0.009 | 0.119 | 2.189 | 0.051 | 0.078 | 2.181 | 0.097 | |
| V2 | 2.04 ± 1.77 | 3.09 ± 2.55 | 3.32 ± 2.32 | |||||||||||
| V3 | 4.36 ± 3.91 | 2.32 ± 2.43 | 3.43 ± 2.54 | |||||||||||
| Knee | Flexion | V1 | 3.27 ± 2.42 c | 1.91 ± 0.99 c | 4.95 ± 2.74 c | 0.001 | 7.753 | 0.161 | 0.067 | 2.798 | 0.065 | 0.852 | 0.337 | 0.016 |
| V2 | 3.25 ± 1.98 c | 4.02 ± 2.61 c | 6.48 ± 3.54 c | |||||||||||
| V3 | 6.31 ± 6.74 ab | 8.14 ± 5.19 ab | 9.26 ± 7.91 ab | |||||||||||
| Extension | V1 | 12.01 ± 9.34 | 6.69 ± 3.31 | 13.80 ± 9.10 | 0.572 | 0.562 | 0.014 | 0.892 | 0.114 | 0.003 | 0.449 | 0.934 | 0.044 | |
| V2 | 9.54 ± 8.93 | 12.58 ± 10.83 | 7.48 ± 6.75 | |||||||||||
| V3 | 12.93 ± 1.18 | 11.88 ± 11.75 | 13.05 ± 12.54 | |||||||||||
| Flexion angle velocity | V1 | 25.18 ± 2.67 bc | 28.23 ± 2.11 bc | 26.40 ± 2.92 bc | <0.001 | 72.845 | 0.643 | 0.978 | 0.022 | 0.001 | 0.652 | 0.617 | 0.030 | |
| V2 | 5.74 ± 5.20 ac | 4.21 ± 3.73 ac | 6.66 ± 3.03 ac | |||||||||||
| V3 | 12.73 ± 10.76 ab | 12.04 ± 7.63 ab | 10.86 ± 10.55 ab | |||||||||||
| Extension angle velocity | V1 | 8.85 ± 8.77 | 7.26 ± 6.07 | 11.59 ± 8.01 | 0.078 | 2.631 | 0.061 | 0.888 | 0.119 | 0.003 | 0.694 | 0.558 | 0.027 | |
| V2 | 7.00 ± 3.57 | 7.36 ± 7.57 | 7.47 ± 5.92 | |||||||||||
| V3 | 10.43 ± 5.95 | 13.26 ± 9.87 | 10.91 ± 9.14 | |||||||||||
| Ankle | Dorsiflexion | V1 | 9.07 ± 3.99 | 6.02 ± 3.02 | 7.49 ± 3.07 | 0.370 | 1.008 | 0.024 | 0.731 | 0.314 | 0.008 | 0.142 | 1.772 | 0.080 |
| V2 | 4.39 ± 2.44 | 7.71 ± 5.63 | 6.05 ± 3.64 | |||||||||||
| V3 | 7.73 ± 4.10 | 6.39 ± 5.15 | 5.07 ± 3.83 | |||||||||||
| Plantarflexion | V1 | 2.58 ± 1.87 c | 4.35 ± 3.16 c | 4.24 ± 2.44 c | 0.001 | 7.755 | 0.161 | 0.130 | 2.095 | 0.049 | 0.184 | 1.594 | 0.073 | |
| V2 | 5.24 ± 6.58 c | 5.14 ± 4.71 c | 1.95 ± 2.08 c | |||||||||||
| V3 | 11.58 ± 5.95 ab | 8.20 ± 5.96 ab | 5.47 ± 7.22 ab | |||||||||||
| Dorsiflexion angle velocity | V1 | 5.45 ± 3.48 | 3.54 ± 2.92 | 5.61 ± 3.93 | 0.153 | 1.920 | 0.045 | 0.325 | 1.141 | 0.027 | 0.459 | 0.915 | 0.043 | |
| V2 | 6.79 ± 4.32 | 7.37 ± 7.11 | 5.85 ± 3.90 | |||||||||||
| V3 | 10.70 ± 5.97 | 6.80 ± 4.49 | 5.47 ± 8.78 | |||||||||||
| Plantarflexion angle velocity | V1 | 3.62 ± 2.11 c | 5.32 ± 3.40 c | 4.92 ± 2.77 c | 0.043 | 3.279 | 0.075 | 0.670 | 0.403 | 0.010 | 0.625 | 0.655 | 0.031 | |
| V2 | 5.34 ± 3.71 | 7.73 ± 4.30 | 5.17 ± 2.19 | |||||||||||
| V3 | 9.00 ± 6.28 a | 7.31 ± 4.56 a | 7.06 ± 8.08 a | |||||||||||
| MTP | Dorsiflexion | V1 | 7.32 ± 7.34 bc | 4.25 ± 4.20 bc | 6.10 ± 4.67 bc | <0.001 | 16.748 | 0.293 | 0.626 | 0.472 | 0.012 | 0.123 | 1.872 | 0.085 |
| V2 | 13.09 ± 7.61 ac | 6.94 ± 4.32 ac | 10.65 ± 3.98 ac | |||||||||||
| V3 | 13.00 ± 5.83 ab | 17.67 ± 7.83 ab | 15.84 ± 7.42 ab | |||||||||||
| Plantarflexion | V1 | 11.41 ± 8.89 | 7.50 ± 5.08 | 14.78 ± 9.21 | 0.303 | 1.211 | 0.029 | 0.217 | 1.556 | 0.037 | 0.033 | 2.757 | 0.120 | |
| V2 | 19.47 ± 14.11 f | 7.10 ± 3.35 f | 9.57 ± 6.91 | |||||||||||
| V3 | 12.65 ± 7.74 | 16.57 ± 11.03 | 15.09 ± 7.67 | |||||||||||
| Dorsiflexion angle velocity | V1 | 7.48 ± 6.07 ce | 9.36 ± 8.60 c | 9.85 ± 7.54 cd | 0.019 | 4.164 | 0.093 | 0.014 | 4.516 | 0.100 | 0.460 | 0.913 | 0.043 | |
| V2 | 7.00 ± 5.03 e | 6.35 ± 6.56 | 15.50 ± 5.77 d | |||||||||||
| V3 | 11.11 ± 8.16 ae | 14.04 ± 8.92 a | 17.40 ± 7.99 ad | |||||||||||
| Plantarflexion angle velocity | V1 | 9.92 ± 5.76 | 8.30 ± 7.78 g | 18.77 ± 12.51 gh | 0.690 | 0.373 | 0.009 | 0.787 | 0.240 | 0.006 | 0.038 | 2.662 | 0.116 | |
| V2 | 14.69 ± 12.95 | 10.44 ± 6.36 | 8.05 ± 5.42 h | |||||||||||
| V3 | 11.35 ± 9.90 | 15.58 ± 8.05 | 12.40 ± 6.88 | |||||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Chen, H.; Song, Y.; Alla, N.; Fekete, G.; Li, J.; Gu, Y. Running Velocity and Longitudinal Bending Stiffness Influence the Asymmetry of Kinematic Variables of the Lower Limb Joints. Bioengineering 2022, 9, 607. https://doi.org/10.3390/bioengineering9110607
Liu Q, Chen H, Song Y, Alla N, Fekete G, Li J, Gu Y. Running Velocity and Longitudinal Bending Stiffness Influence the Asymmetry of Kinematic Variables of the Lower Limb Joints. Bioengineering. 2022; 9(11):607. https://doi.org/10.3390/bioengineering9110607
Chicago/Turabian StyleLiu, Qian, Hairong Chen, Yang Song, Nykytiuk Alla, Gusztáv Fekete, Jianpeng Li, and Yaodong Gu. 2022. "Running Velocity and Longitudinal Bending Stiffness Influence the Asymmetry of Kinematic Variables of the Lower Limb Joints" Bioengineering 9, no. 11: 607. https://doi.org/10.3390/bioengineering9110607
APA StyleLiu, Q., Chen, H., Song, Y., Alla, N., Fekete, G., Li, J., & Gu, Y. (2022). Running Velocity and Longitudinal Bending Stiffness Influence the Asymmetry of Kinematic Variables of the Lower Limb Joints. Bioengineering, 9(11), 607. https://doi.org/10.3390/bioengineering9110607