
The Effect of Real-Time Video-Based Engagement and Feedback during Pedaling on Cadence Control and Exercise Motivation: A Proof-of-Concept Study




Abstract
:1. Introduction
2. Materials and Methods
2.1. Subject Recruitment
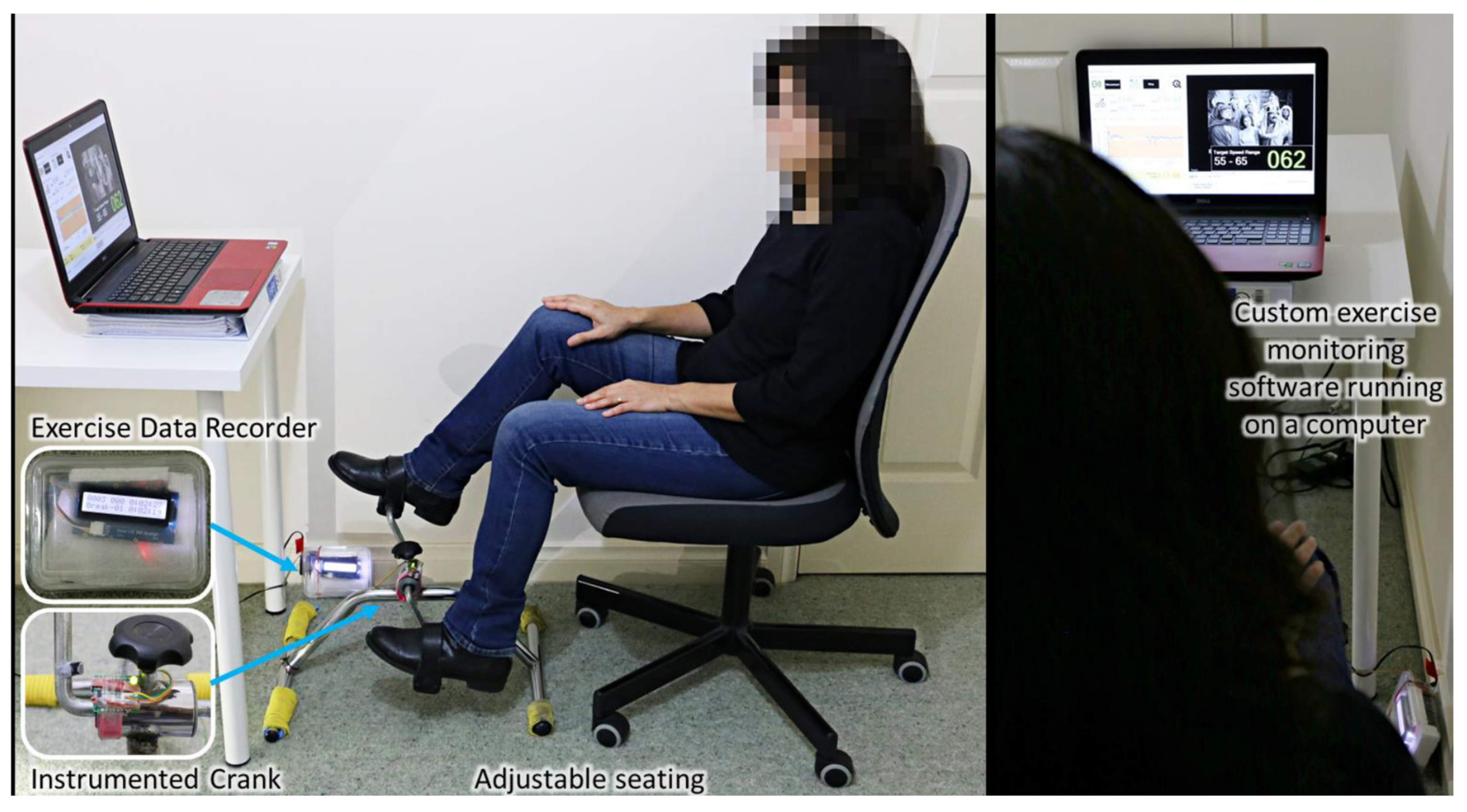
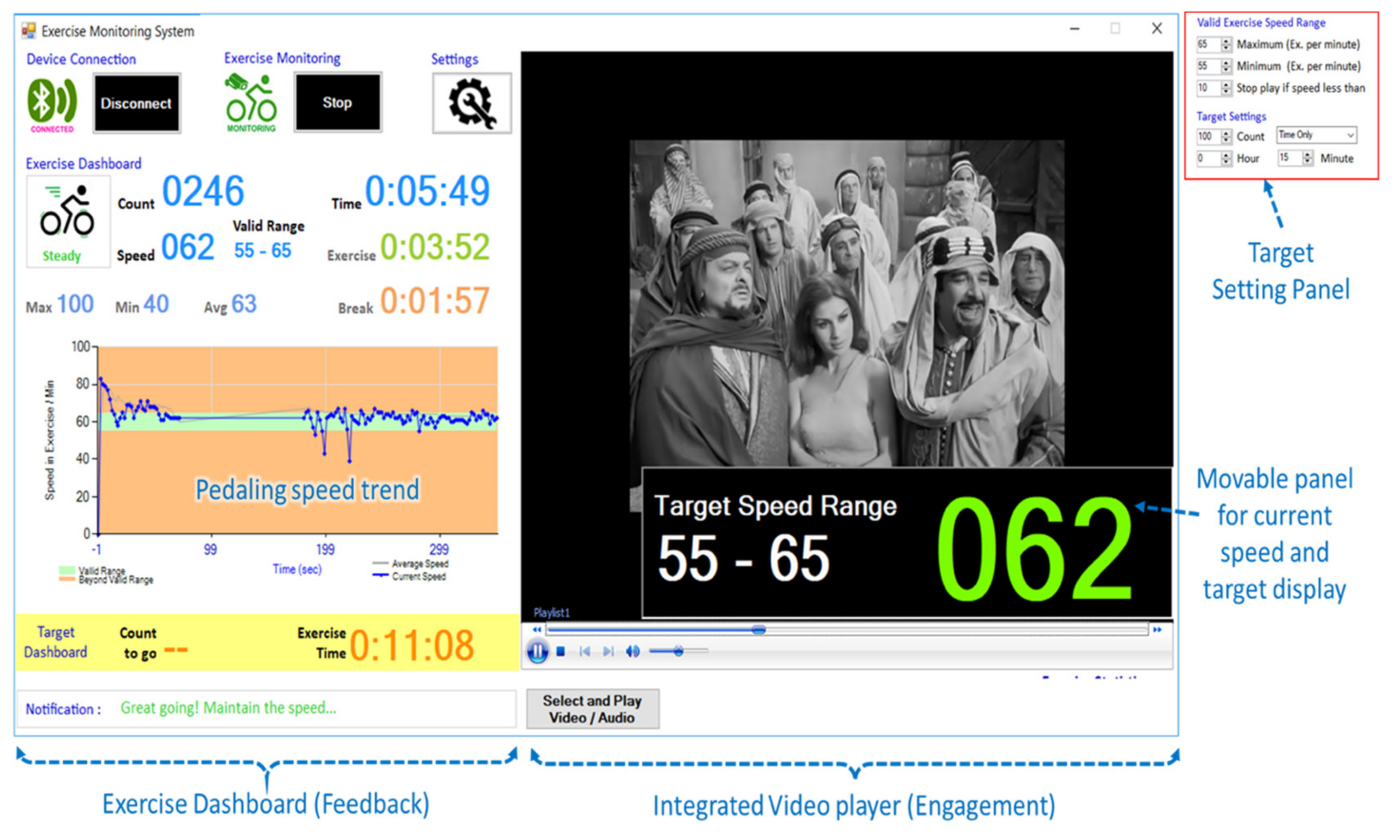
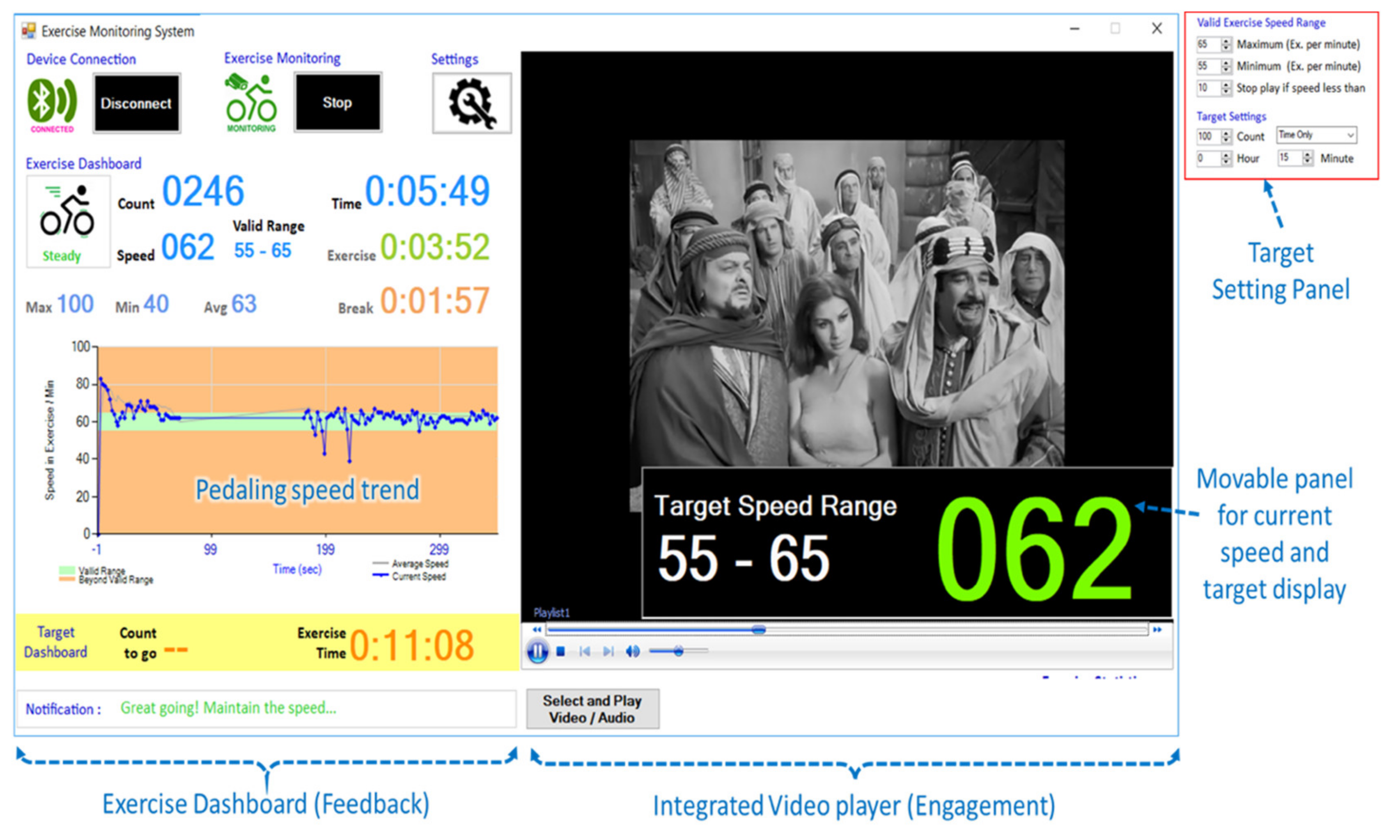
2.2. Testing Apparatus
2.3. Testing Protocol
2.4. Data Analysis
3. Results
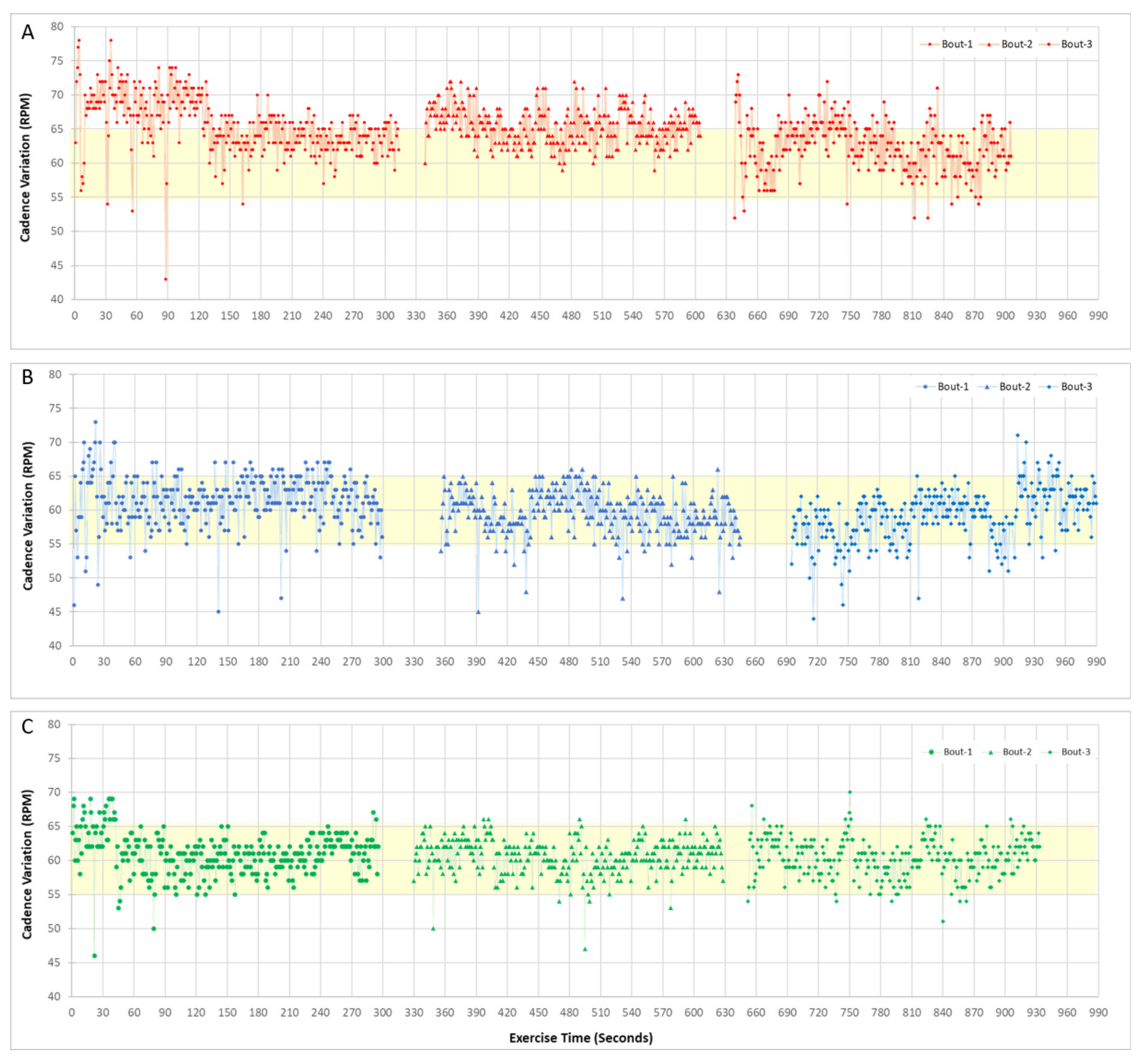
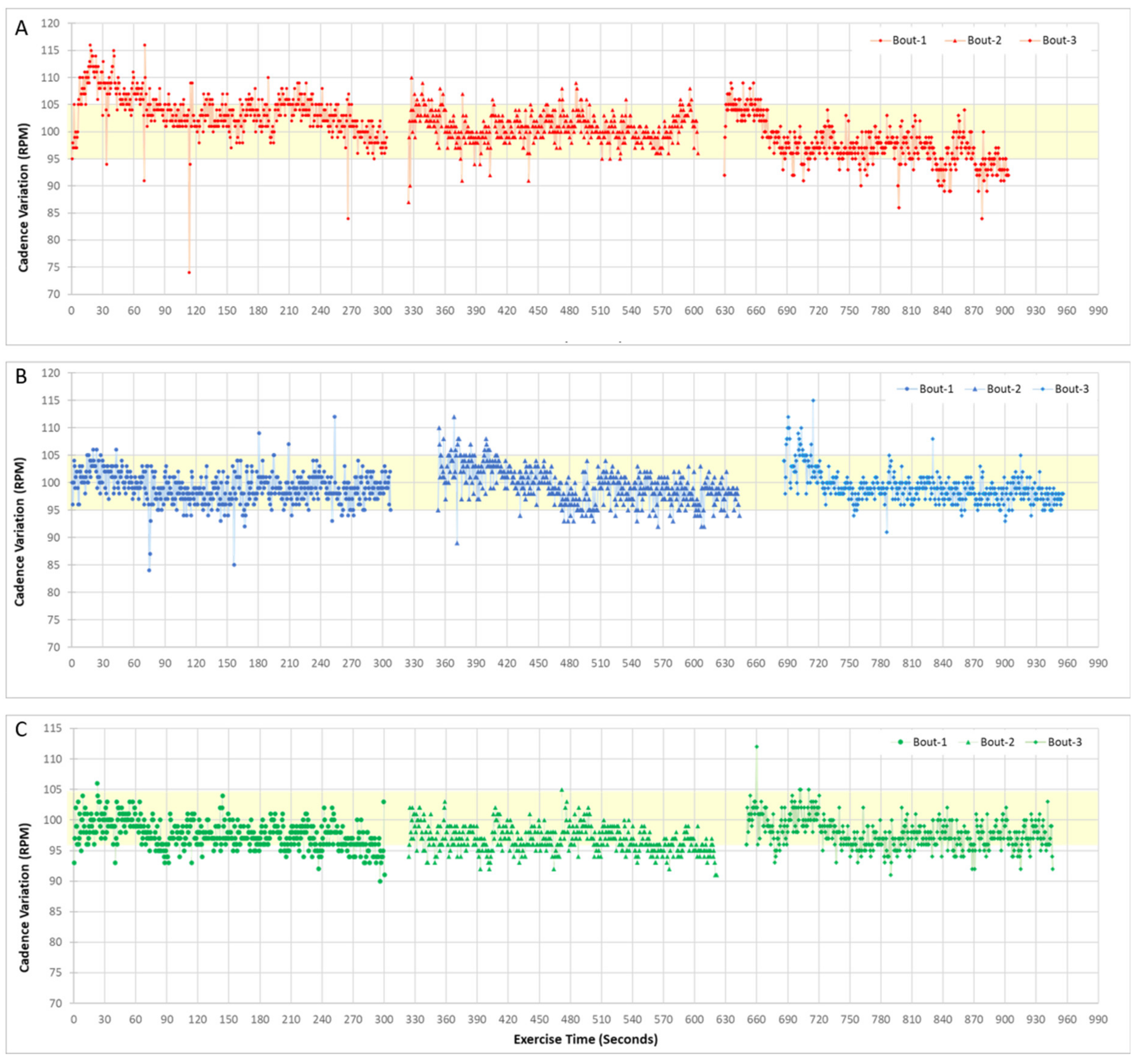
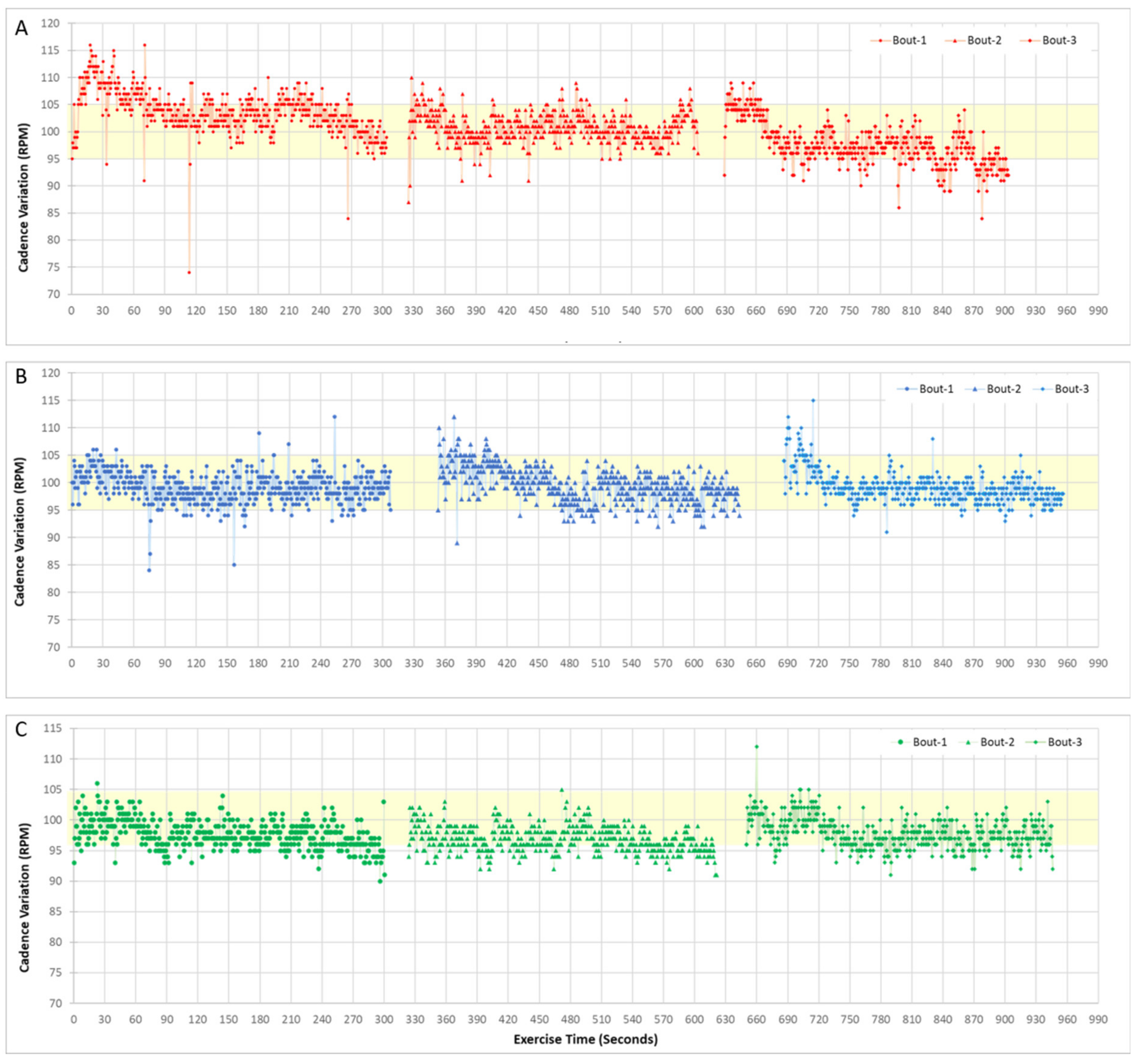
3.1. Cadence Control
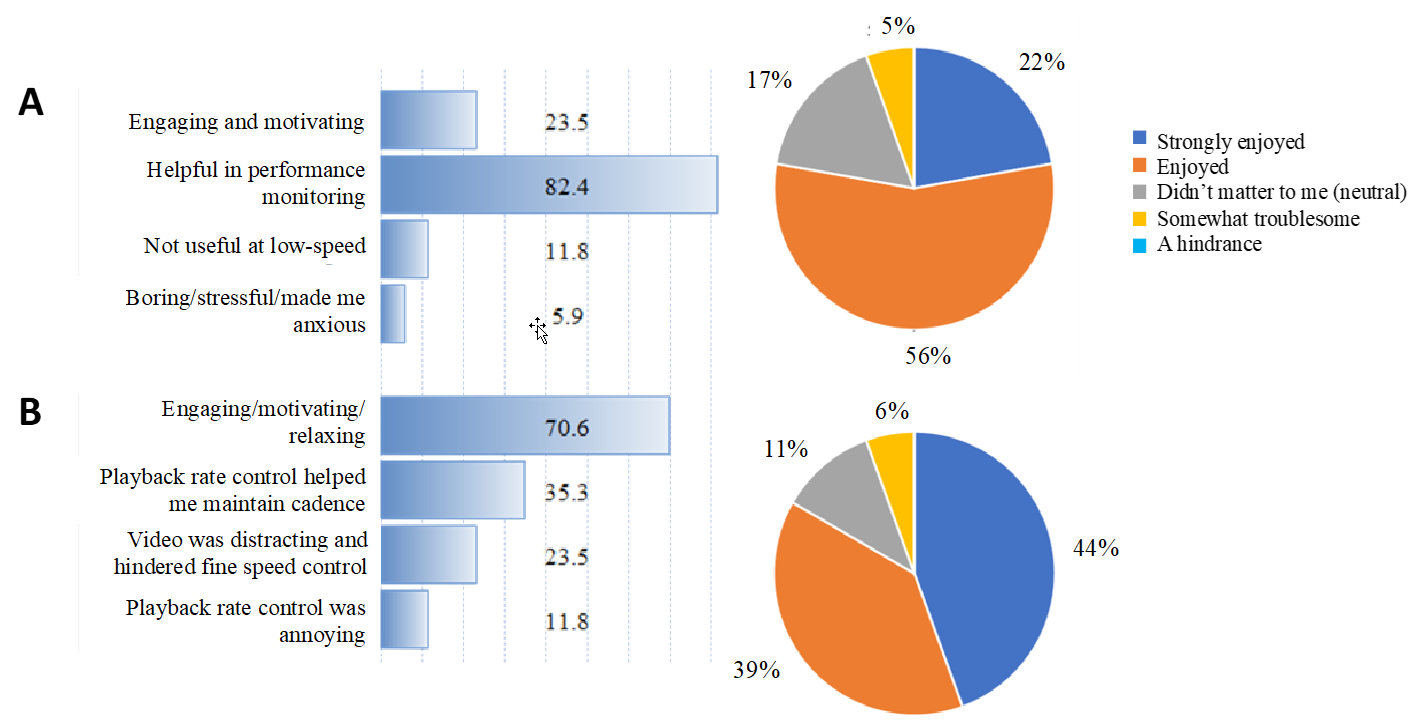
3.2. Self-Reported Outcome Measures
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Custom Cycle Ergometer
Appendix B
Appendix B.1. Effect Size
Appendix B.2. Interpretation of the Effect Size

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Effect Size | Percentage of Control Group below the Average Individual in the Test Group | Probability That One Could Guess Which Group a Person Was in from Knowledge of Their ‘Score’ | Probability That an Individual from the Test Group Is Higher Than an Individual in the Control Group, If Both Chosen at Random |
|---|---|---|---|
| 0.0 | 50.0% | 0.50 | 0.50 |
| 0.1 | 54.0% | 0.52 | 0.53 |
| 0.2 | 58.0% | 0.54 | 0.56 |
| 0.3 | 62.0% | 0.56 | 0.58 |
| 0.4 | 66.0% | 0.58 | 0.61 |
| 0.5 | 69.0% | 0.60 | 0.64 |
| 0.6 | 73.0% | 0.62 | 0.66 |
| 0.7 | 76.0% | 0.64 | 0.69 |
| 0.8 | 79.0% | 0.66 | 0.71 |
| 0.9 | 82.0% | 0.67 | 0.74 |
| 1.0 | 84.0% | 0.69 | 0.76 |
| 1.2 | 88.0% | 0.73 | 0.80 |
| 1.4 | 92.0% | 0.76 | 0.84 |
| 1.6 | 95.0% | 0.79 | 0.87 |
| 1.8 | 96.0% | 0.82 | 0.90 |
| 2.0 | 98.0% | 0.84 | 0.92 |
| 2.5 | 99.0% | 0.89 | 0.96 |
| 3.0 | 99.9% | 0.93 | 0.98 |
| Low Cadence | High Cadence | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Baseline | Feedback | Engagement | Baseline | Feedback | Engagement | ||||||||||
| Mean | SD | Mean | SD | Mean | SD | Mean | SD | Mean | SD | Mean | SD | Int | Sp | Int * Spa | |
| Mean cadence deviation | 3.4 | 6.1 | 1.1 | 2.5 | 0.3 | 1.4 | −0.9 | 6.4 | −0.2 | 3.2 | −1.0 | 5.8 | 0.187 | 0.032 * | 0.149 |
| CV (Mean cadence) | 6.0 | 1.4 | 5.6 | 1.1 | 5.5 | 1.3 | 4.8 | 1.8 | 3.8 | 1.0 | 4.0 | 1.1 | 0.005 ** | <0.001 *** | 0.502 |
| Absolute deviation | 6.1 | 4.1 | 3.1 | 2.0 | 2.7 | 0.9 | 6.8 | 3.3 | 3.7 | 2.0 | 4.6 | 4.6 | <0.001 *** | 0.230 | 0.539 |
| CV (Absolute deviation) | 4.5 | 0.9 | 3.9 | 1.0 | 3.7 | 0.9 | 3.4 | 0.9 | 2.8 | 0.8 | 2.8 | 0.6 | <0.001 *** | <0.001 *** | 0.845 |
Appendix C
Mean Cadence
| Baseline | Feedback | Engagement | |||||
|---|---|---|---|---|---|---|---|
| Mean | SD | Mean | SD | Mean | SD | ||
| Low Cadence | 63.4 | 6.1 | 61.1 | 2.5 | 60.3 | 1.4 | |
| High Cadence | 99.1 | 6.4 | 99.8 | 3.2 | 99.0 | 5.8 | |
References
- Barbosa, D.; Santos, C.P.; Martins, M. The application of cycling and cycling combined with feedback in the rehabilitation of stroke patients: A review. J. Stroke Cerebrovasc. Dis. 2015, 24, 253–273. [Google Scholar] [CrossRef]
- Ferrante, S.; Ambrosini, E.; Ravelli, P.; Guanziroli, E.; Molteni, F.; Ferrigno, G.; Pedrocchi, A. A biofeedback cycling training to improve locomotion: A case series study based on gait pattern classification of 153 chronic stroke patients. J. Neuroeng. Rehabil. 2011, 8, 47. [Google Scholar] [CrossRef] [Green Version]
- Hollands, K.L.; Pelton, T.A.; Tyson, S.F.; Hollands, M.A.; van Vliet, P.M. Interventions for coordination of walking following stroke: Systematic review. Gait Posture 2012, 35, 349–359. [Google Scholar] [CrossRef] [PubMed]
- Potempa, K.; Lopez, M.; Braun, L.T.; Szidon, J.P.; Fogg, L.; Tincknell, T. Physiological outcomes of aerobic exercise training in hemiparetic stroke patients. Stroke 1995, 26, 101–105. [Google Scholar] [CrossRef] [PubMed]
- Lin, S.-I.; Lo, C.-C.; Lin, P.-Y.; Chen, J.-J.J. Biomechanical assessments of the effect of visual feedback on cycling for patients with stroke. J. Electromyogr. Kinesiol. 2012, 22, 582–588. [Google Scholar] [CrossRef] [PubMed]
- Raasch, C.C.; Zajac, F.E. Locomotor strategy for pedaling: Muscle groups and biomechanical functions. J. Neurophysiol. 1999, 82, 515–525. [Google Scholar] [CrossRef]
- Mazzocchio, R.; Meunier, S.; Ferrante, S.; Molteni, F.; Cohen, L.G. Cycling, a tool for locomotor recovery after motor lesions? Neurorehability 2008, 23, 67–80. [Google Scholar] [CrossRef]
- Kamps, A.; Schüle, K. Cyclic movement training of the lower limb in stroke rehabilitation. Neurol. Rehabil. 2005, 11, 1–12. [Google Scholar]
- Katz-Leurer, M.; Sender, I.; Keren, O.; Dvir, Z. The influence of early cycling training on balance in stroke patients at the subacute stage. Results of a preliminary trial. Clin. Rehabil. 2006, 20, 398–405. [Google Scholar] [CrossRef]
- Simpson, L.A.; Eng, J.J.; Tawashy, A.E. Exercise perceptions among people with stroke: Barriers and facilitators to participation. Int. J. Ther. Rehabil. 2011, 18, 520–530. [Google Scholar] [CrossRef]
- Brown, D.A.; Kautz, S. Speed-dependent reductions of force output in people with poststroke hemiparesis. Phys. Ther. 1999, 79, 919–930. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kautz, S.A.; Brown, D.A. Relationships between timing of muscle excitation and impaired motor performance during cyclical lower extremity movement in post-stroke hemiplegia. Brain 1998, 121, 515–526. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Holt, R.; Kendrick, C.; McGlashan, K.; Kirker, S.; Jenner, J. Static bicycle training for functional mobility in chronic stroke. Physiotherapy 2001, 87, 257–260. [Google Scholar] [CrossRef]
- Joseph, C.; Strömbäck, B.; Hagströmer, M.; Conradsson, D. Accelerometry: A feasible method to monitor physical activity during sub-acute rehabilitation of persons with stroke. J. Rehabil. Med. 2018, 8, 429–434. [Google Scholar] [CrossRef] [Green Version]
- Gill, L.; Sullivan, K.A. Boosting exercise beliefs and motivation through a psychological intervention designed for poststroke populations. Top. Stroke Rehabil. 2011, 18, 470–480. [Google Scholar] [CrossRef]
- Billinger, S.A.; Arena, R.; Bernhardt, J.; Eng, J.J.; Franklin, B.A.; Johnson, C.M.; MacKay-Lyons, M.; Macko, R.F.; Mead, G.E.; Roth, E.J.; et al. Physical activity and exercise recommendations for stroke survivors: A statement for healthcare professionals from the American Heart Association/American Stroke Association. Stroke 2014, 45, 2532–2553. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ortís, L.C.; Maymí, J.N.; Feliu, J.C.; Vidal, J.M.L.; Romero, E.P.; Bassets, M.P.; Herreros, M.V.; Brosa, J.V. Exercise motivation in university community members: A behavioural intervention. Psicothema 2007, 19, 250–255. [Google Scholar]
- Barwood, M.; Weston, N.J.; Thelwell, R.C.; Page, J. A motivational music and video intervention improves high-intensity exercise performance. J. Sports Sci. Med. 2009, 8, 435–442. [Google Scholar]
- Hutchinson, J.C.; Karageorghis, C.I.; Jones, L. See Hear: Psychological effects of music and music-video during treadmill running. Ann. Behav. Med. 2015, 49, 199–211. [Google Scholar] [CrossRef] [Green Version]
- Lin, J.-H.; Lu, F.J.-H. Interactive effects of visual and auditory intervention on physical performance and perceived effort. J. Sports Sci. Med. 2013, 12, 388–393. [Google Scholar]
- Stanley, C.T.; Pargman, D.; Tenenbaum, G. The effect of attentional coping strategies on perceived exertion in a cycling task. J. Appl. Sport Psychol. 2007, 19, 352–363. [Google Scholar] [CrossRef]
- Jones, L.; Karageorghis, C.I.; Ekkekakis, P. Can high-intensity exercise be more pleasant? attentional dissociation using music and video. J. Sport Exerc. Psychol. 2015, 37, 436–448. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Monedero, J.; Lyons, E.J.; O’Gorman, D.J. Interactive video game cycling leads to higher energy expenditure and is more enjoyable than conventional exercise in adults. PLoS ONE 2015, 10, e0118470. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Robergs, R.A.; Bereket, S.; Knight, M.A. Video-assisted cycling alters perception of effort and increases self-selected exercise intensity. Percept. Mot. Ski. 1998, 86, 915–927. [Google Scholar] [CrossRef] [PubMed]
- MacRae, H.S.H.; Miller-Perrin, C.L.; Tinberg C., M. Cycling with video feedback improves performance in untrained, but not in trained women. Res. Sport Med. 2003, 11, 261–276. [Google Scholar] [CrossRef]
- Lind, E.; Welch, A.S.; Ekkekakis, P. Do ‘mind over muscle’ strategies work? Sport. Med. 2009, 39, 743–764. [Google Scholar] [CrossRef]
- Lind, E. The Role of an Audio-Visual Attentional Stimulus in Influencing Affective Responses during Graded Cycling Exercise. Ph.D. Thesis, Iowa State University, Ames, IA, USA, 2009. [Google Scholar]
- Stastny, P.; Tufano, J.; Kregl, J.; Petr, M.; Blazek, D.; Steffl, M.; Roczniok, R.; Fiala, M.; Golas, A.; Zmijewski, P. The role of visu-al feedback on power output during intermittent Wingate testing in ice hockey players. Sports 2018, 6, 32. [Google Scholar] [CrossRef] [Green Version]
- Mestre, D.R.; Ewald, M.; Maiano, C. Virtual reality and exercise: Behavioral and psychological effects of visual feedback. Stud. Health Technol. Inform. 2011, 167, 122–127. [Google Scholar]
- Nowlan, G. The Physiological and Perceptual Responses to Cycling Exercise in a Fully Immersive Virtual Environment. Master’s Thesis, University of Chester, Cheshire, UK, 2016. [Google Scholar]
- Marsh, W.E.; Kelly, J.W.; Dark, V.J.; Oliver, J.H. Cognitive demands of semi-natural virtual locomotion. Presence Teleoperators Virtual Environ. 2013, 22, 216–234. [Google Scholar] [CrossRef]

| Low Cadence | High Cadence | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Baseline | Feedback | Engagement | Baseline | Feedback | Engagement | p-Values | |||||||||
| Mean | SD | Mean | SD | Mean | SD | Mean | SD | Mean | SD | Mean | SD | Int | Sp | Int * Sp | |
| Mean cadence deviation | 3.4 | 6.1 | 1.1 | 2.5 | 0.3 | 1.4 | −0.9 | 6.4 | −0.2 | 3.2 | −1.0 | 5.8 | 0.187 | 0.032 * | 0.149 |
| CV (Mean cadence) | 6.0 | 1.4 | 5.6 | 1.1 | 5.5 | 1.3 | 4.8 | 1.8 | 3.8 | 1.0 | 4.0 | 1.1 | 0.005 ** | <0.001 *** | 0.502 |
| Absolute deviation | 6.1 | 4.1 | 3.1 | 2.0 | 2.7 | 0.9 | 6.8 | 3.3 | 3.7 | 2.0 | 4.6 | 4.6 | <0.001 *** | 0.230 | 0.539 |
| CV (Absolute deviation) | 4.5 | 0.9 | 3.9 | 1.0 | 3.7 | 0.9 | 3.4 | 0.9 | 2.8 | 0.8 | 2.8 | 0.6 | <0.001 *** | <0.001 *** | 0.845 |
| Low Cadence | High Cadence | |||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Feedback vs. Baseline | Engagement vs. Baseline | Engagement vs. Feedback | Feedback vs. Baseline | Engagement vs. Baseline | Engagement vs. Feedback | |||||||||||||||||||
| Mean Diff. | p Value | 95% CI | Mean Diff. | p Value | 95% CI | Mean Diff. | p Value | 95% CI | Mean Diff. | p Value | 95% CI | Mean Diff. | p Value | 95% CI | Mean Diff. | p Value | 95% CI | |||||||
| LL | UL | LL | UL | LL | UL | LL | UL | LL | UL | LL | UL | |||||||||||||
| Mean cadence | −2.3 | 0.338 | −3.8 | −0.7 | −3.0 | 0.130 | −4.5 | −1.6 | −0.8 | 0.500 | −1.5 | −0.1 | 0.7 | 0.607 | −1.0 | 2.4 | −0.1 | 0.939 | −2.1 | 1.9 | −0.8 | 0.471 | −2.4 | 0.7 |
| CV (mean cadence) | −0.4 | 0.166 | −0.9 | −0.0 | −0.6 | 0.083 | −1.0 | −0.1 | −0.1 | 0.687 | −0.5 | 0.3 | −1.0 | 0.037 * | −1.5 | −0.5 | −0.9 | 0.034 * | −1.4 | −0.4 | 0.1 | 0.582 | −0.2 | 0.5 |
| Absolute cadence deviation | −3.0 | 0.028 * | −4.1 | −1.9 | −3.4 | 0.010 ** | −4.4 | −2.4 | −0.4 | 0.723 | −0.9 | 0.1 | −3.1 | 0.002 ** | −4.0 | −2.2 | −2.2 | 0.007 ** | −3.5 | −0.8 | 0.9 | 0.383 | −0.3 | 2.1 |
| CV (absolute cadence deviation) | −0.6 | 0.029 * | −0.9 | −0.3 | −0.8 | 0.001 ** | −1.1 | −0.5 | −0.2 | 0.346 | −0.5 | 0.1 | −0.6 | 0.033 * | −0.9 | −0.3 | −0.7 | 0.004 ** | −0.9 | −0.4 | −0.1 | 0.644 | −0.3 | 0.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Soni, M.; Wijeratne, T.; Ackland, D.C. The Effect of Real-Time Video-Based Engagement and Feedback during Pedaling on Cadence Control and Exercise Motivation: A Proof-of-Concept Study. Bioengineering 2021, 8, 95. https://doi.org/10.3390/bioengineering8070095
Soni M, Wijeratne T, Ackland DC. The Effect of Real-Time Video-Based Engagement and Feedback during Pedaling on Cadence Control and Exercise Motivation: A Proof-of-Concept Study. Bioengineering. 2021; 8(7):95. https://doi.org/10.3390/bioengineering8070095
Chicago/Turabian StyleSoni, Mukesh, Tissa Wijeratne, and David C. Ackland. 2021. "The Effect of Real-Time Video-Based Engagement and Feedback during Pedaling on Cadence Control and Exercise Motivation: A Proof-of-Concept Study" Bioengineering 8, no. 7: 95. https://doi.org/10.3390/bioengineering8070095
APA StyleSoni, M., Wijeratne, T., & Ackland, D. C. (2021). The Effect of Real-Time Video-Based Engagement and Feedback during Pedaling on Cadence Control and Exercise Motivation: A Proof-of-Concept Study. Bioengineering, 8(7), 95. https://doi.org/10.3390/bioengineering8070095