Figure 1.
Schematic showing (left) the experimental setup, and (right) the SuitX Back-support exoskeleton.
Figure 1.
Schematic showing (left) the experimental setup, and (right) the SuitX Back-support exoskeleton.
Figure 2.
Schematic with (left) an illustration showing marker placement locations, and sensor systems, including force plates (under each foot) and electromyography sensors (green boxes), and (right) definition of segments for recording body movement using optoelectronic marker-based motion capture system. Red colored arrows indicate ground reaction forces.
Figure 2.
Schematic with (left) an illustration showing marker placement locations, and sensor systems, including force plates (under each foot) and electromyography sensors (green boxes), and (right) definition of segments for recording body movement using optoelectronic marker-based motion capture system. Red colored arrows indicate ground reaction forces.
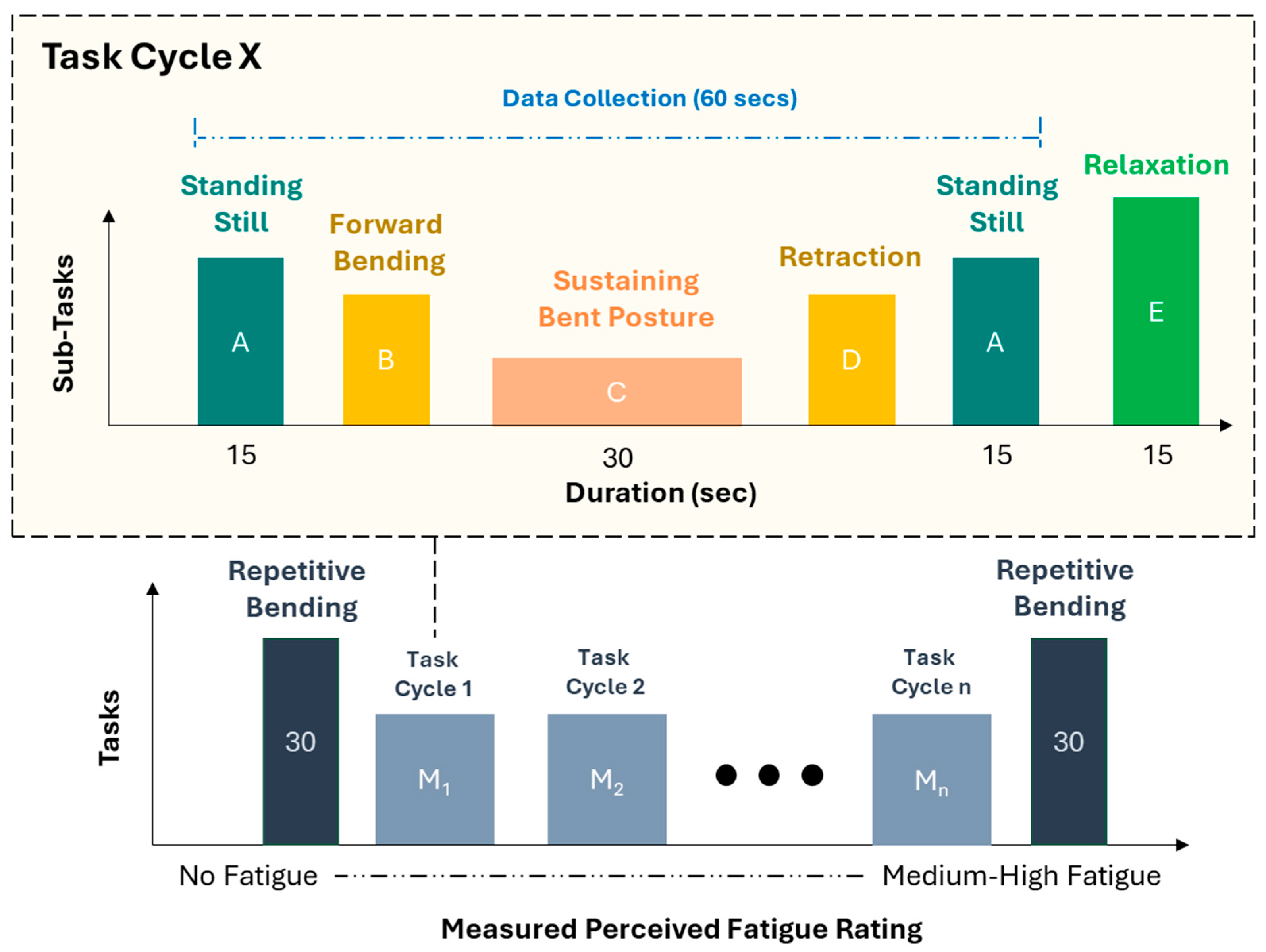
Figure 3.
Schematic representing the experimental protocol with tasks and sub-tasks arranged in modules. Tasks included 30 counts of repetitive bending at the start during no fatigue, and then again at the end at medium-high fatigue with sub-tasks in the form of task cycles in between. Sub-tasks were conducted for a total duration of 75 s including a 15 s relaxation break.
Figure 3.
Schematic representing the experimental protocol with tasks and sub-tasks arranged in modules. Tasks included 30 counts of repetitive bending at the start during no fatigue, and then again at the end at medium-high fatigue with sub-tasks in the form of task cycles in between. Sub-tasks were conducted for a total duration of 75 s including a 15 s relaxation break.
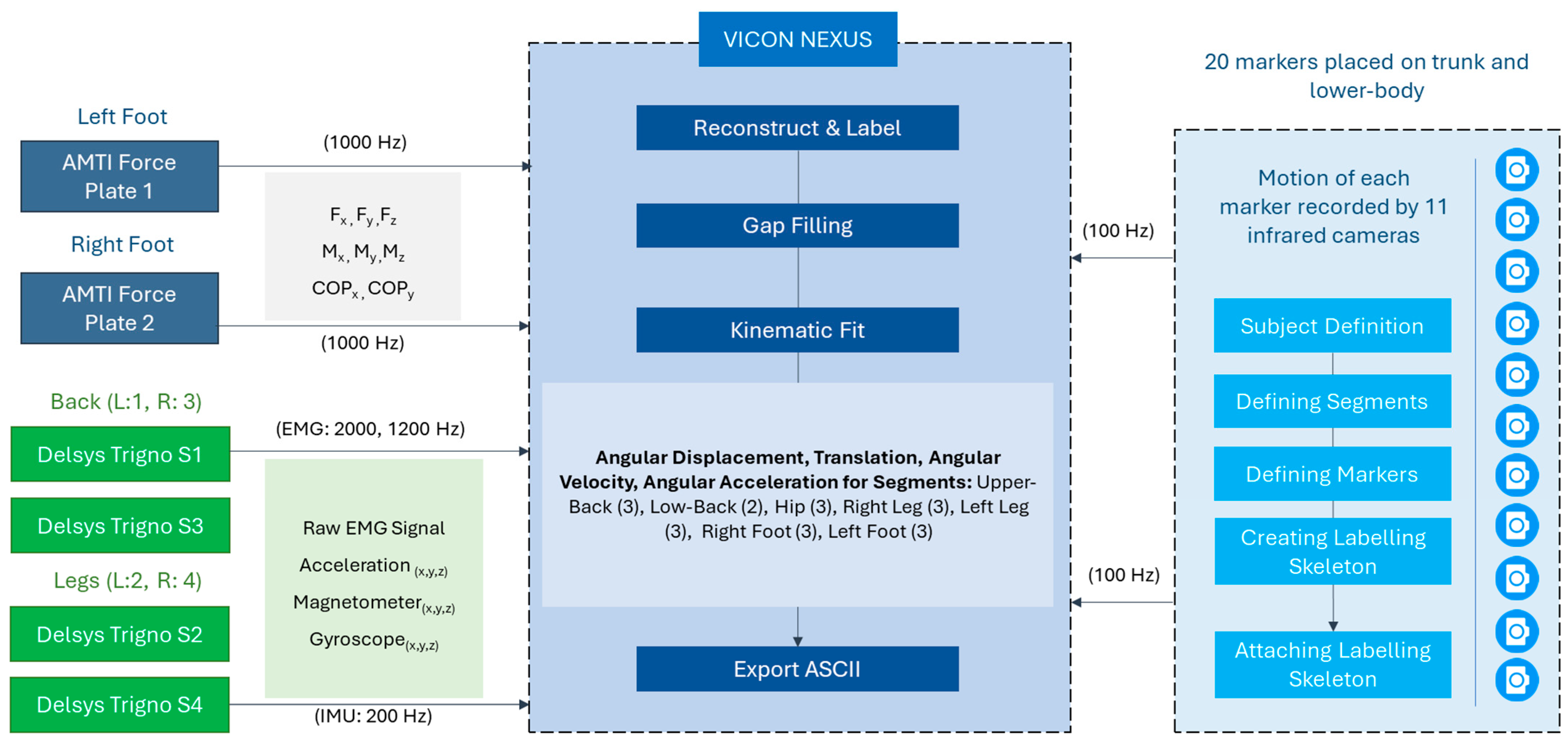
Figure 4.
Schematic depicting an overview of the VICON system showing time-synced data collection from surface electromyography (sEMG), motion capture, and force plate systems (all data except those collected from sEMG were utilized for analysis in this study).
Figure 4.
Schematic depicting an overview of the VICON system showing time-synced data collection from surface electromyography (sEMG), motion capture, and force plate systems (all data except those collected from sEMG were utilized for analysis in this study).
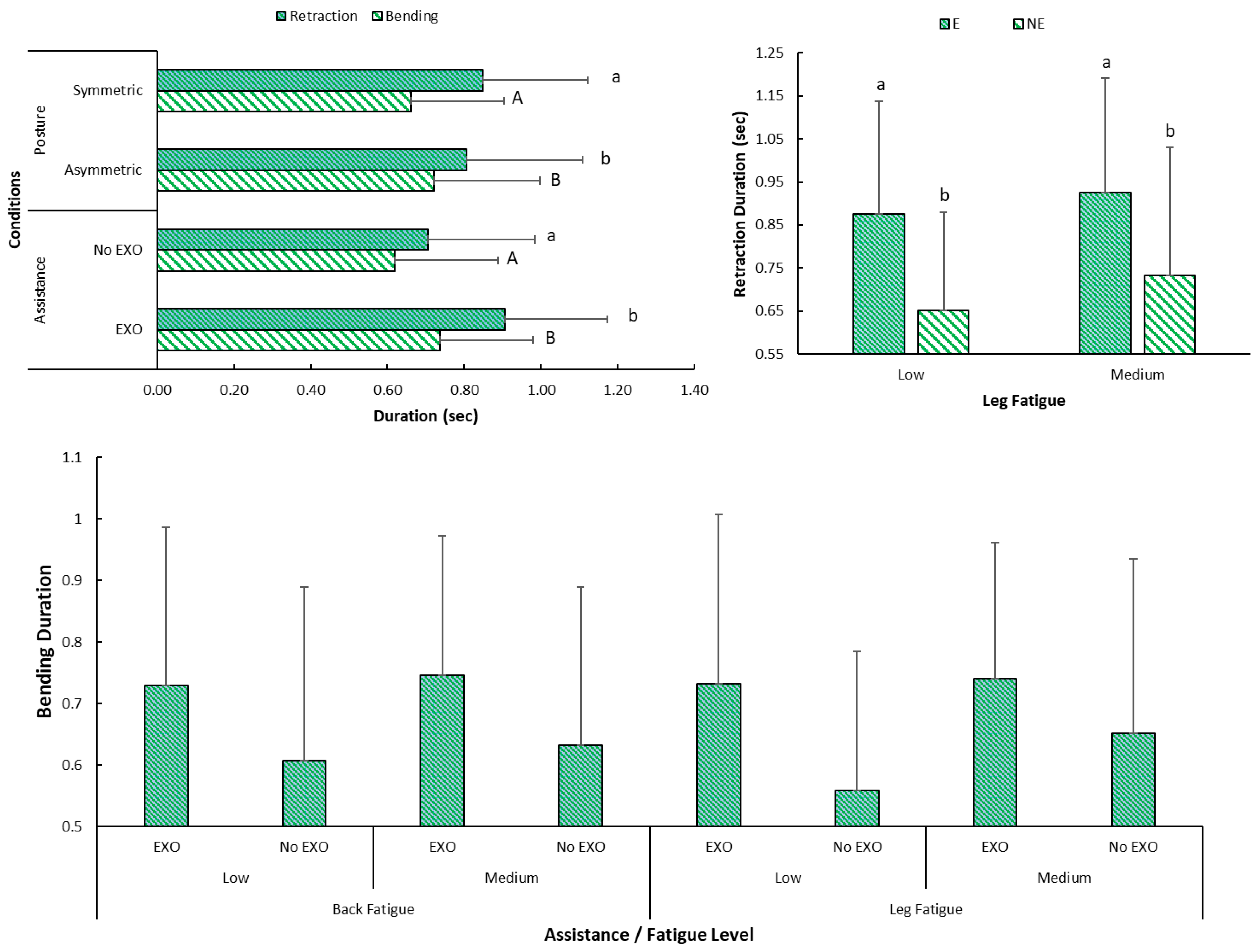
Figure 5.
Graphs showing (left) duration of bending and retraction categorized according to assistance (No EXO: no exoskeleton, EXO: exoskeleton) and posture (asymmetric/symmetric), and (right) retraction duration variation with leg fatigue. Bottom graph also includes categorization based on back and leg fatigue as low fatigue and medium fatigue (note: Significant differences are denoted by different letters in different style in the graphs at the top. Values between conditions within same sub-category are significantly different in the bottom graph. Error bars denote standard deviation).
Figure 5.
Graphs showing (left) duration of bending and retraction categorized according to assistance (No EXO: no exoskeleton, EXO: exoskeleton) and posture (asymmetric/symmetric), and (right) retraction duration variation with leg fatigue. Bottom graph also includes categorization based on back and leg fatigue as low fatigue and medium fatigue (note: Significant differences are denoted by different letters in different style in the graphs at the top. Values between conditions within same sub-category are significantly different in the bottom graph. Error bars denote standard deviation).
Figure 6.
Graphs showing (left) maximum velocities in anterior/posterior direction during bending, retraction, and sustained bending portions of the task cycle categorized according to assistance (No EXO: no exoskeleton, EXO: exoskeleton) based on back (FB) and leg (FL) fatigue as low fatigue and medium fatigue (note: Values between assistance conditions within same category are significant in all graphs. Error bars denote standard deviation).
Figure 6.
Graphs showing (left) maximum velocities in anterior/posterior direction during bending, retraction, and sustained bending portions of the task cycle categorized according to assistance (No EXO: no exoskeleton, EXO: exoskeleton) based on back (FB) and leg (FL) fatigue as low fatigue and medium fatigue (note: Values between assistance conditions within same category are significant in all graphs. Error bars denote standard deviation).
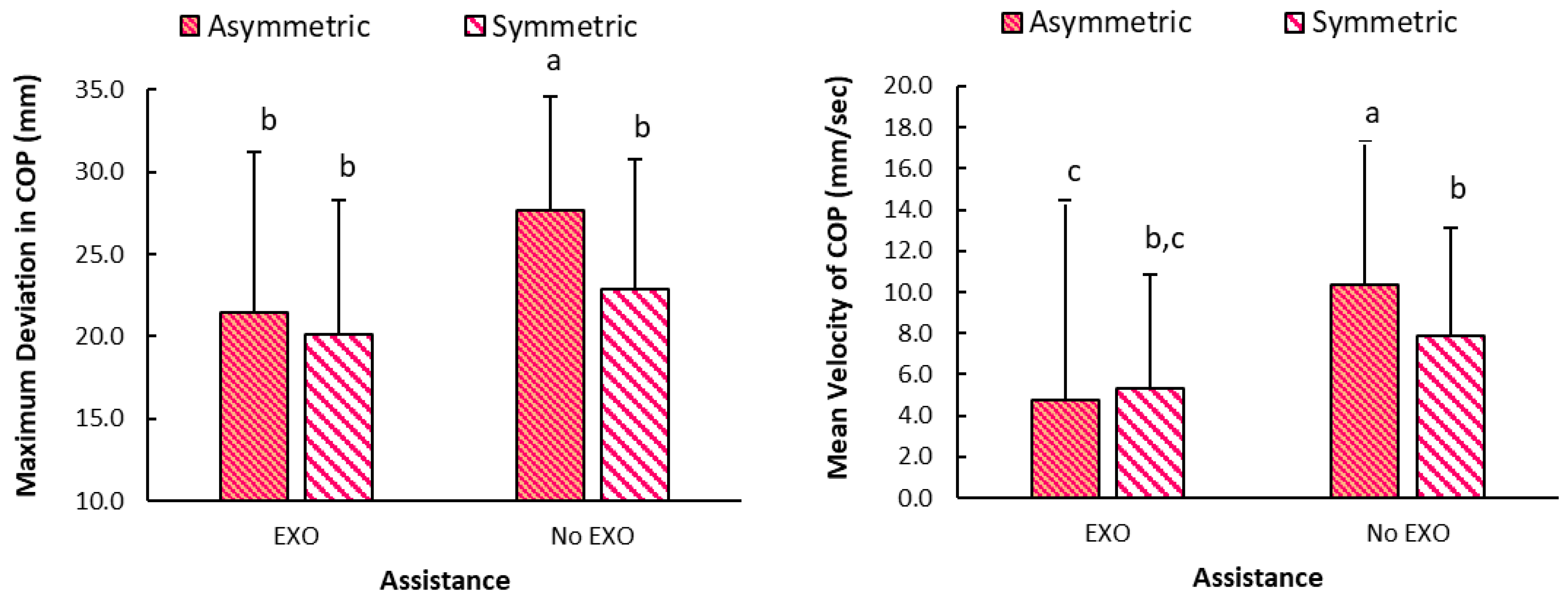
Figure 7.
Graph showing maximum deviation and mean velocity of COP location during sustained portion of task cycle categorized based on assistance (NE: no exoskeleton, E: exoskeleton), and posture (A: Asymmetric, S: Symmetric) (note: Different letters (a/b/c on error bars denote statistical significance. Error bars denote standard deviation).
Figure 7.
Graph showing maximum deviation and mean velocity of COP location during sustained portion of task cycle categorized based on assistance (NE: no exoskeleton, E: exoskeleton), and posture (A: Asymmetric, S: Symmetric) (note: Different letters (a/b/c on error bars denote statistical significance. Error bars denote standard deviation).
Figure 8.
Graph showing maximum deviation and mean velocity of COP location during standing still at the start, sustained and standing still at the end portion of task cycle categorized based on assistance (No EXO: no exoskeleton, EXO: exoskeleton), and posture (Asymmetric, Symmetric) (note: Values between assistance conditions (E vs. NE) are significantly different for each portion of task cycle. Error bars denote standard deviation).
Figure 8.
Graph showing maximum deviation and mean velocity of COP location during standing still at the start, sustained and standing still at the end portion of task cycle categorized based on assistance (No EXO: no exoskeleton, EXO: exoskeleton), and posture (Asymmetric, Symmetric) (note: Values between assistance conditions (E vs. NE) are significantly different for each portion of task cycle. Error bars denote standard deviation).
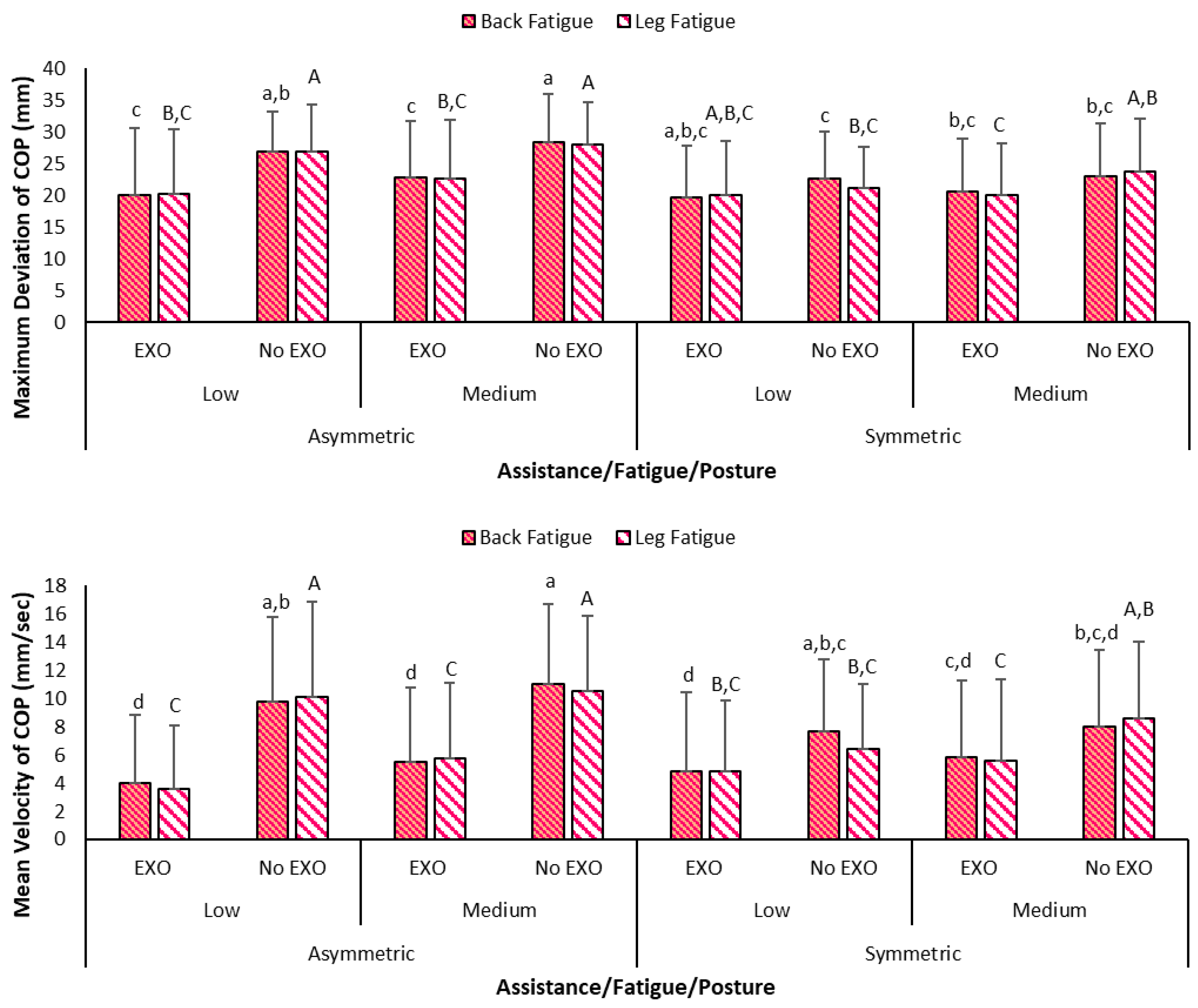
Figure 9.
Graph showing maximum deviation and mean velocity of COP location during sustained portion of task cycle categorized based on assistance (No EXO: no exoskeleton, EXO: exoskeleton), back/leg fatigue (Low, Medium) and posture (Asymmetric, Symmetric) (note: different styled letters on error bars denote statistical significance. Error bars denote standard deviation).
Figure 9.
Graph showing maximum deviation and mean velocity of COP location during sustained portion of task cycle categorized based on assistance (No EXO: no exoskeleton, EXO: exoskeleton), back/leg fatigue (Low, Medium) and posture (Asymmetric, Symmetric) (note: different styled letters on error bars denote statistical significance. Error bars denote standard deviation).
Table 1.
Demographic measurements of the study participants showing the mean, standard deviation (SD), and the ranges in the form of maximum and minimum values for age, height, weight, body-mass index, and chest and hip circumferences.
Table 1.
Demographic measurements of the study participants showing the mean, standard deviation (SD), and the ranges in the form of maximum and minimum values for age, height, weight, body-mass index, and chest and hip circumferences.
| Factor | Mean | SD | Maximum | Minimum |
|---|
| Age (yrs.) | 19.41 | 1.38 | 22 | 18 |
| Height (cm) | 178.33 | 3.34 | 184 | 172 |
| Weight (kg) | 73.66 | 6.36 | 82.44 | 65.68 |
| Body-Mass Index (kg/m2) | 23.16 | 2.28 | 27.56 | 20.50 |
| Chest Circumference (mm) | 89.83 | 4.09 | 96 | 84 |
| Hip Circumference (mm) | 86.91 | 6.11 | 98 | 80 |
Table 2.
Response variables of trunk movement and stability. Tasks include B: bending, R: retraction, SUS: sustained bending, SS: standing at start, SE: standing at end of task cycle.
Table 2.
Response variables of trunk movement and stability. Tasks include B: bending, R: retraction, SUS: sustained bending, SS: standing at start, SE: standing at end of task cycle.
| Response Variable (Unit) | Task | Description |
|---|
| Bending duration (s) | B | Duration of trunk flexion movement in seconds. |
| Retraction duration (s) | R | Duration of return to neutral stance movement in seconds. |
| Maximum velocity of upper-back (mm/s) | B, R | Maximum velocity of upper-back in anterior/posterior, medial/lateral, and superior/inferior directions. |
| Percent overshoot of upper-back during bending (%) | B | Movement of upper-back beyond intended position before starting/after ending the bending movement in superior direction in percentage. |
| Percent overshoot of upper-back (%) | R | Movement of upper-back beyond intended position after completing the retraction movement in anterior/posterior direction in percentage. |
| Distance between upper-back and COP (mm) | SUS | Distance between the upper-back and the center of pressure anterior/posterior, medial/lateral, and superior/inferior directions. |
| Maximum deviation of COP (mm) | SUS, SS, SE | Maximum deviation of the center of pressure co-odinates in the horizontal plane. |
| Mean velocity of COP (mm/s) | SUS, SS, SE | Mean velocity of the center of pressure co-odinates in the horizontal plane |
| Sample Entropy of COP (units) | SUS | Sample entropy of the center of pressure in anterior/posterior, and medial/lateral directions. |
| Variance in COP (mm2) | SUS | Variance of the center of pressure in anterior/posterior, medial/lateral, and superior/inferior directions. |
| Difference in Ground Reaction Force (N) | SUS | Difference between the ground reaction force at left and right foot. |
| Mean Ground Reaction Force (N) | SUS | Mean of ground reaction forces at the left/right force plate. |
Table 3.
Mean and standard deviation of trunk angles in sagittal, coronal, and transverse planes categorized according to assistance and posture (note: statistically significantly different values are shown by different letters in the ‘Diff’ column).
Table 3.
Mean and standard deviation of trunk angles in sagittal, coronal, and transverse planes categorized according to assistance and posture (note: statistically significantly different values are shown by different letters in the ‘Diff’ column).
| Assistance | Posture | Sagittal Plane Angle (deg) | | Coronal Plane Angle (deg) | | Transverse Plane Angle (deg) | |
|---|
| | | Mean | SD | Diff | Mean | SD | Diff | Mean | SD | Diff |
|---|
| EXO | Asymmetric | 48.9 | 8.4 | A | 35.8 | 9.3 | A | 39.7 | 9.6 | A |
| Symmetric | 54.4 | 6.2 | B | 5.6 | 4.7 | B | 15.9 | 5.3 | B |
| No EXO | Asymmetric | 54.1 | 6.2 | B | 52.7 | 9.9 | A | 38.7 | 10.3 | A |
| Symmetric | 56.1 | 6.2 | B | 8.5 | 8.1 | B | 12.1 | 6.6 | B |
Table 4.
Maximum velocity in mm/s during bending portion of task cycle in medial/lateral and anterior/posterior directions compared between assistance conditions of with exoskeleton (EXO) and without exoskeleton (No EXO). (note: statistically significantly different values are shown by ‘*’ symbol in the ‘Diff’ column).
Table 4.
Maximum velocity in mm/s during bending portion of task cycle in medial/lateral and anterior/posterior directions compared between assistance conditions of with exoskeleton (EXO) and without exoskeleton (No EXO). (note: statistically significantly different values are shown by ‘*’ symbol in the ‘Diff’ column).
| | Anterior/Posterior | | Medial/Lateral | |
|---|
| Assistance | Mean | SD | Diff (EXO v No EXO) | Mean | SD | Diff (EXO v No EXO) |
|---|
| EXO | 356.70 | 86.99 | * | 130.00 | 105.55 | - |
| No EXO | 409.80 | 111.06 | 140.40 | 115.01 |
Table 5.
Maximum angular acceleration of the trunk in sagittal plane categorized according to assistance as exoskeleton (EXO) and without exoskeleton (No EXO); and posture as asymmetric (A) and symmetric (S). (note: statistically significantly different values are shown by ‘*’ symbol in the ‘Diff’ column).
Table 5.
Maximum angular acceleration of the trunk in sagittal plane categorized according to assistance as exoskeleton (EXO) and without exoskeleton (No EXO); and posture as asymmetric (A) and symmetric (S). (note: statistically significantly different values are shown by ‘*’ symbol in the ‘Diff’ column).
| Assistance | Maximum Angular Acceleration in Anterior/Posterior Direction During Bending (mm/s2) | | Maximum Angular Acceleration in Anterior/Posterior Direction During Retraction (mm/s2) | |
|---|
| | Mean | SD | Diff | Mean | SD | Diff |
|---|
| EXO | 28.87 | 4.68 | * | 32.05 | 5.49 | * |
| No EXO | 33.60 | 4.49 | 36.63 | 3.91 |
Table 6.
Overshoot percentages for bending and retraction at start/end categorized according to assistance as exoskeleton (E) and without exoskeleton (NE); and posture as asymmetric (A) and symmetric (S). (note: statistically significantly different values are shown by ‘*’ symbol in the ‘Diff’ column).
Table 6.
Overshoot percentages for bending and retraction at start/end categorized according to assistance as exoskeleton (E) and without exoskeleton (NE); and posture as asymmetric (A) and symmetric (S). (note: statistically significantly different values are shown by ‘*’ symbol in the ‘Diff’ column).
| Response Variables | | Asymmetric Posture | Symmetric Posture |
|---|
| | | E | NE | Diff (EXO v No EXO) | E | NE | Diff (EXO v No EXO) |
|---|
| Percent overshoot during start of bending in vertical direction (%) | Mean | 7.06 | 7.74 | * | 6.18 | 8.18 | * |
| SD | 3.56 | 2.72 | 3.16 | 3.38 |
| Percent overshoot during end of bending in vertical direction (%) | Mean | 2.94 | 2.86 | * | 2.73 | 3.05 | * |
| SD | 2.73 | 2.46 | 2.42 | 2.75 |
| Percent overshoot during end of retraction in frontal direction (%) | Mean | 8.06 | 6.36 | * | 5.57 | 5.35 | * |
| SD | 5.45 | 3.97 | 3.80 | 3.16 |
Table 7.
Outcomes of measures of stability categorized according to assistance (EXO: exoskeleton, No EXO: no exoskeleton). (note: statistically significantly different values are shown by ‘*’ symbol in the ‘Diff’ column).
Table 7.
Outcomes of measures of stability categorized according to assistance (EXO: exoskeleton, No EXO: no exoskeleton). (note: statistically significantly different values are shown by ‘*’ symbol in the ‘Diff’ column).
| Response Variable/Assistance | EXO | No EXO | Diff (EXO v No EXO) |
|---|
| Mean | SD | Mean | SD |
|---|
| Maximum deviationin COP direction during sustained bending (mm) | 20.80 | 8.98 | 25.34 | 7.75 | * |
| Mean velocity in COP during sustained bending (mm/s) | 5.04 | 5.32 | 9.14 | 5.68 | * |
| Sample Entropy in COP in anterior–posterior direction during sustained bending (units) | 0.08 | 0.11 | 0.14 | 0.12 | * |
| Sample Entropy in COP in medio-lateral direction during sustained bending (units) | 0.28 | 0.24 | 0.46 | 0.23 | * |
| Variance in COP in anterior–posterior direction during sustained bending (mm2) | 39.75 | 48.63 | 25.87 | 21.82 | * |
| Variance in COP in medio-lateral direction during sustained bending (mm2) | 30.87 | 32.21 | 47.23 | 34.04 | * |
| Difference in GRF beween left and right foot during sustained bending (N) | 19.22 | 15.95 | 23.13 | 18.00 | * |
| GRF at left foot (N) | 456.05 | 99.79 | 411.96 | 160.12 | * |
| GRF at right foot (N) | 288.92 | 91.68 | 259.84 | 102.31 | * |
Table 8.
Outcomes of measures of stability categorized according to posture (Asymmetry, Symmetry). (note: statistically significantly different values are shown by ‘*’ symbol in the ‘Diff’ column).
Table 8.
Outcomes of measures of stability categorized according to posture (Asymmetry, Symmetry). (note: statistically significantly different values are shown by ‘*’ symbol in the ‘Diff’ column).
| Response Variable/Posture | Asymmetric | Symmetric | |
|---|
| Mean | SD | Mean | SD | Diff (Asymmetric v Symmetric) |
|---|
| Maximum deviationin COP direction during sustained bending (mm) | 24.04 | 9.20 | 21.21 | 8.15 | * |
| Mean velocity in COP during sustained bending (mm/s) | 7.05 | 6.08 | 6.30 | 5.54 | * |
| Variance in COP in medio-lateral direction during sustained bending (mm2) | 45.91 | 37.52 | 29.26 | 27.71 | * |
| Difference in GRF beween left and right foot during sustained bending (N) | 35.62 | 9.17 | 6.39 | 7.71 | * |
| GRF at left foot (N) | 535.38 | 79.36 | 344.60 | 93.46 | * |
| GRF at right foot (N) | 202.03 | 75.72 | 350.38 | 46.32 | * |
Table 9.
Variance (mean and SD) of COP location in mm2 during sustained bending in medial-lateral direction categorized based on assistance and fatigue levels in both back and legs. (note: significance is shown by uncommon letters).
Table 9.
Variance (mean and SD) of COP location in mm2 during sustained bending in medial-lateral direction categorized based on assistance and fatigue levels in both back and legs. (note: significance is shown by uncommon letters).
| Posture | Assistance | Fatigue | Mean | SD | Significance |
|---|
| Asymmetric | EXO | Back Fatigue Categorization | Low | 31.64 | 35.04 | B,C |
| Medium | 41.76 | 38.04 | A,B |
| No EXO | Low | 58.06 | 33.76 | A |
| Medium | 59.74 | 35.78 | A |
| Symmetric | EXO | Low | 23.66 | 24.85 | C |
| Medium | 27.64 | 27.81 | B,C |
| No EXO | Low | 33.49 | 31.44 | B |
| Medium | 36.44 | 26.95 | B,C |
| Asymmetric | EXO | Leg Fatigue Categorization | Low | 32.39 | 35.21 | B |
| Medium | 40.44 | 37.95 | A,B |
| No EXO | Low | 62.22 | 39.59 | A |
| Medium | 57.25 | 32.05 | A |
| Symmetric | EXO | Low | 23.72 | 24.12 | C |
| Medium | 26.46 | 27.36 | B,C |
| No EXO | Low | 28.13 | 29.55 | B,C |
| Medium | 38.67 | 28.09 | B |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}