
Hip Exoskeleton for Cycling Assistance


Abstract
1. Introduction
2. Materials and Methods
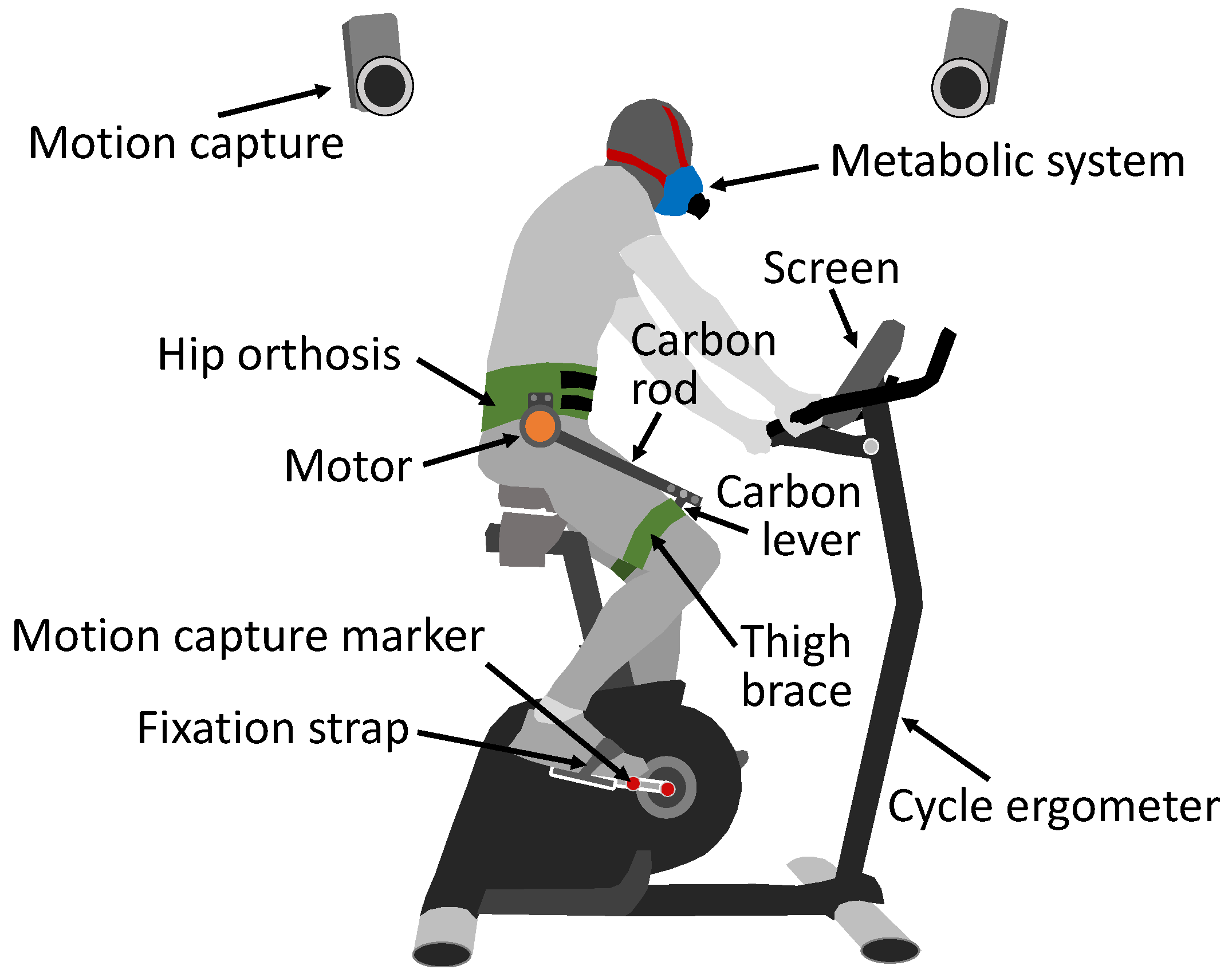
2.1. Experimental Setup
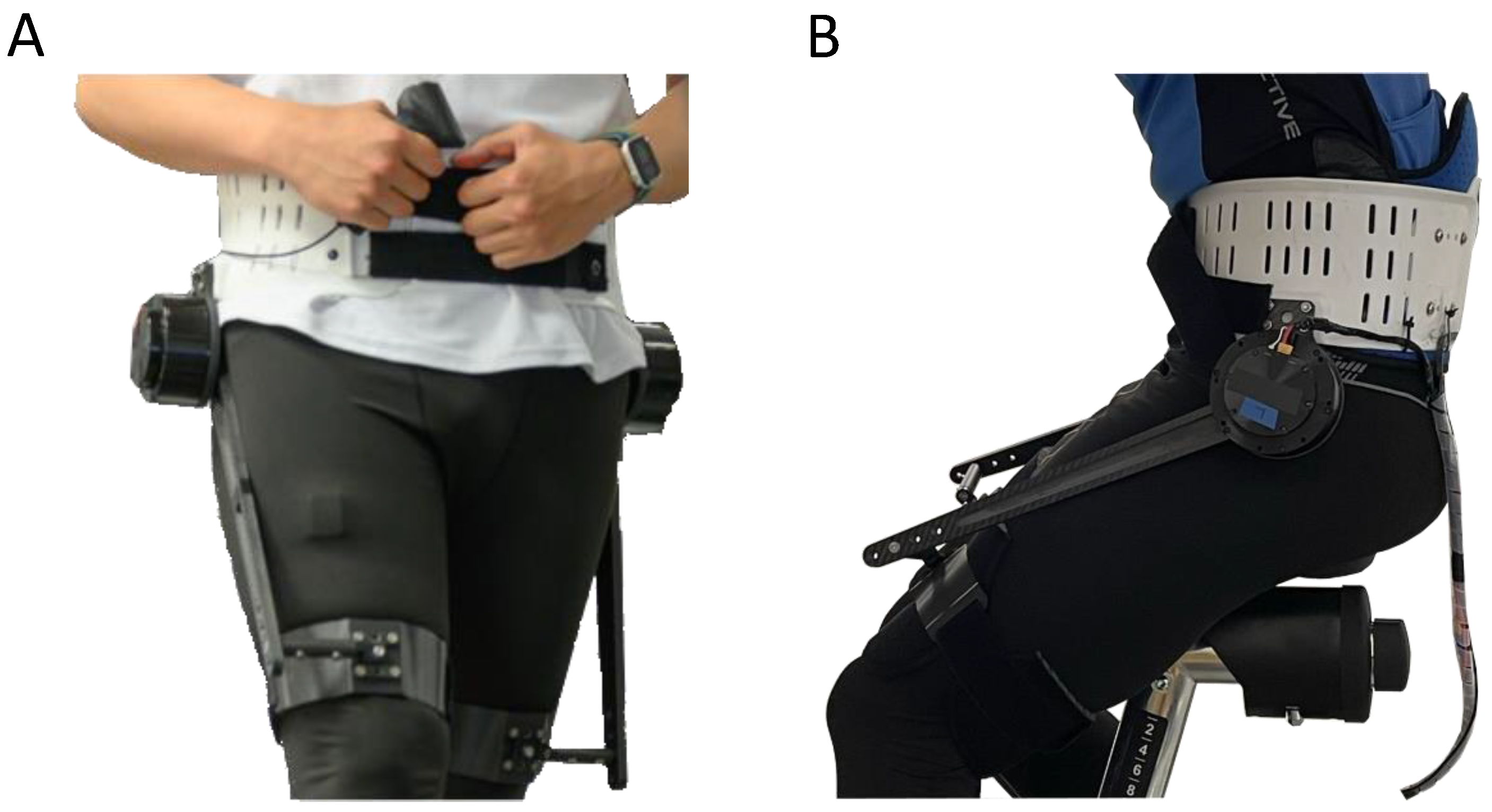
2.2. Exoskeleton Hardware and Control
2.3. Experimental Protocol
2.4. Data Analysis
2.4.1. Metabolic Cost
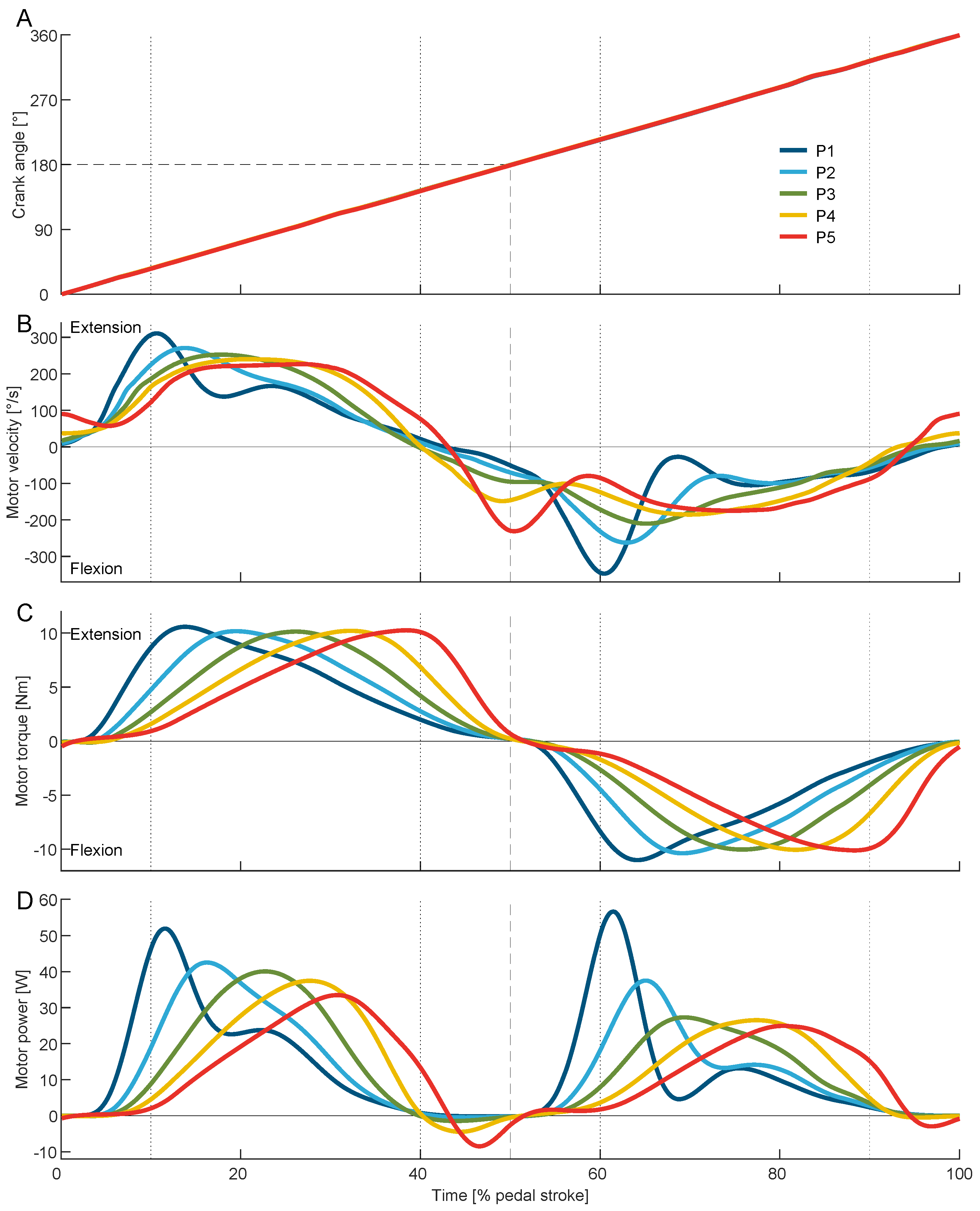
2.4.2. Crank Angle and Angular Velocity
2.4.3. Motor Torque and Power
2.4.4. Polynomial Fit
3. Results
3.1. Crank Angle and Angular Velocity
3.2. Motor Torque and Power
3.3. Metabolic Cost
3.4. Metabolic Cost vs. Motor Power
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BDC | bottom dead center of the crank; |
| TDC | top dead center of the crank; |
| HITL | human-in-the-loop; |
| Optimal | optimal condition with control parameters from HITL optimization; |
| PS | pedal stroke; |
| P1 to P5 | phases during sweep protocol; |
| Transp. | transparent condition with zero motor current; |
| w/o Exo | condition without wearing the exoskeleton; |
| normalized crank angle; | |
| peak extension torque timing; | |
| peak flexion torque timing; | |
| exoskeleton hip torque. |
References
- Gross, M.; Stevenson, P.; Charette, S.; Pyka, G.; Marcus, R. Effect of muscle strength and movement speed on the biomechanics of rising from a chair in healthy elderly and young women. Gait Posture 1998, 8, 175–185. [Google Scholar] [CrossRef] [PubMed]
- Ades, P.A.; Ballor, D.L.; Ashikaga, T.; Utton, J.L.; Nair, K.S. Weight training improves walking endurance in healthy elderly persons. Ann. Intern. Med. 1996, 124, 568–572. [Google Scholar] [CrossRef] [PubMed]
- Talbot, L.A.; Metter, E.J.; Fleg, J.L. Leisure-time physical activities and their relationship to cardiorespiratory fitness in healthy men and women 18–95 years old. Med. Sci. Sport. Exerc. 2000, 32, 417–425. [Google Scholar] [CrossRef]
- Grimmer, M.; Riener, R.; Walsh, C.J.; Seyfarth, A. Mobility related physical and functional losses due to aging and disease—A motivation for lower limb exoskeletons. J. Neuroeng. Rehabil. 2019, 16, 2. [Google Scholar] [CrossRef] [PubMed]
- Bassett, D.R.; Pucher, J.; Buehler, R.; Thompson, D.L.; Crouter, S.E. Walking, cycling, and obesity rates in Europe, North America, and Australia. J. Phys. Act. Health 2008, 5, 795–814. [Google Scholar] [CrossRef] [PubMed]
- World Health Organization. Global Recommendations on Physical Activity for Health; World Health Organization: Geneva, Switzerland, 2010. [Google Scholar]
- Sawicki, G.S.; Beck, O.N.; Kang, I.; Young, A.J. The exoskeleton expansion: Improving walking and running economy. J. Neuroeng. Rehabil. 2020, 17, 25. [Google Scholar] [CrossRef] [PubMed]
- Sperlich, B.; Zinner, C.; Hébert-Losier, K.; Born, D.P.; Holmberg, H.C. Biomechanical, cardiorespiratory, metabolic and perceived responses to electrically assisted cycling. Eur. J. Appl. Physiol. 2012, 12, 4015–4025. [Google Scholar] [CrossRef] [PubMed]
- Franks, P.W.; Bryan, G.M.; Martin, R.M.; Reyes, R.; Lakmazaheri, A.C.; Collins, S.H. Comparing optimized exoskeleton assistance of the hip, knee, and ankle in single and multi-joint configurations. Wearable Technol. 2021, 2, e16. [Google Scholar] [CrossRef] [PubMed]
- Tucker, M.R.; Olivier, J.; Pagel, A.; Bleuler, H.; Bouri, M.; Lambercy, O.; del R Millán, J.; Riener, R.; Vallery, H.; Gassert, R. Control strategies for active lower extremity prosthetics and orthotics: A review. J. Neuroeng. Rehabil. 2015, 12, 1. [Google Scholar] [CrossRef]
- Pinto-Fernandez, D.; Torricelli, D.; del Carmen Sanchez-Villamanan, M.; Aller, F.; Mombaur, K.; Conti, R.; Vitiello, N.; Moreno, J.C.; Pons, J.L. Performance evaluation of lower limb exoskeletons: A systematic review. IEEE Trans. Neural. Syst. Rehabil. Eng. 2020, 28, 1573–1583. [Google Scholar] [CrossRef]
- Baud, R.; Manzoori, A.R.; Ijspeert, A.; Bouri, M. Review of control strategies for lower-limb exoskeletons to assist gait. J. NeuroEng. Rehabil. 2021, 18, 119. [Google Scholar] [CrossRef]
- Wu, Q.; Wang, X.; Du, F.; Zhang, X. Design and control of a powered hip exoskeleton for walking assistance. Int. J. Adv. Robot. 2015, 12, 18. [Google Scholar] [CrossRef]
- Quinlivan, B.T.; Lee, S.; Malcolm, P.; Rossi, D.M.; Grimmer, M.; Siviy, C.; Karavas, N.; Wagner, D.; Asbeck, A.; Galiana, I.; et al. Assistance magnitude versus metabolic cost reductions for a tethered multiarticular soft exosuit. Sci. Rob. 2017, 2, eaah4416. [Google Scholar] [CrossRef]
- Young, A.J.; Foss, J.; Gannon, H.; Ferris, D.P. Influence of power delivery timing on the energetics and biomechanics of humans wearing a hip exoskeleton. Front. Bioeng. Biotechnol. 2017, 5, 4. [Google Scholar] [CrossRef]
- Kang, I.; Kunapuli, P.; Young, A.J. Real-time neural network-based gait phase estimation using a robotic hip exoskeleton. IEEE Trans. Med. Robot. Bionics 2019, 2, 28–37. [Google Scholar] [CrossRef]
- Rakhtala, S.M. Adaptive gain super twisting algorithm to control a knee exoskeleton disturbed by unknown bounds. Int. J. Dyn. Control 2021, 9, 711–726. [Google Scholar] [CrossRef]
- Rakhtala, S.M.; Ghayebi, R. Real time control and fabrication of a soft robotic glove by two parallel sensors with MBD approach. Med. Eng. Phys. 2022, 100, 103743. [Google Scholar] [CrossRef]
- Grimmer, M.; Stasica, M.; Zhao, G. Exoskeleton developments at the Technical University of Darmstadt. In Proceedings of the International Symposium on Technikpsychologie (TecPsy), Darmstadt, Germany, 15 February 2023; pp. 82–94. [Google Scholar] [CrossRef]
- Heo, G.S.; Lee, S.R.; Kwak, M.K.; Park, C.W.; Kim, G.; Lee, C.Y. Motion control of bicycle-riding exoskeleton robot with interactive force analysis. Int. J. Precis. Eng. Manuf. 2015, 16, 1631–1637. [Google Scholar] [CrossRef]
- Aasvold, L.O.; Ettema, G.; Skovereng, K. Joint specific power production in cycling: The effect of cadence and intensity. PLoS ONE 2019, 14, e0212781. [Google Scholar] [CrossRef]
- Grimmer, M.; Quinlivan, B.T.; Lee, S.; Malcolm, P.; Rossi, D.M.; Siviy, C.; Walsh, C.J. Comparison of the human-exosuit interaction using ankle moment and ankle positive power inspired walking assistance. J. Biomech. 2019, 83, 76–84. [Google Scholar] [CrossRef]
- Ryan, M.; Gregor, R. EMG profiles of lower extremity muscles during cycling at constant workload and cadence. J. Electromyogr. Kinesiol. 1991, 2, 69–80. [Google Scholar] [CrossRef]
- Ericson, M.O.; Bratt, A.; Nisell, R.; Németh, G.; Ekholm, J. Load moments about the hip and knee joints during ergometer cycling. Scand. J. Rehabil. Med. 1986, 18, 165–172. [Google Scholar] [CrossRef]
- Bini, R.R.; Diefenthaeler, F. Kinetics and kinematics analysis of incremental cycling to exhaustion. Sport. Biomech. 2010, 9, 223–235. [Google Scholar] [CrossRef]
- Zhu, H.; Nesler, C.; Divekar, N.; Peddinti, V.; Gregg, R.D. Design principles for compact, backdrivable actuation in partial-assist powered knee orthoses. IEEE/ASME Trans. Mechatron. 2021, 26, 3104–3115. [Google Scholar] [CrossRef]
- Nesler, C.; Thomas, G.; Divekar, N.; Rouse, E.J.; Gregg, R.D. Enhancing voluntary motion with modular, backdrivable, powered hip and knee orthoses. IEEE Robot. Autom. Lett. 2022, 7, 6155–6162. [Google Scholar] [CrossRef]
- Marsh, A.P.; Martin, P.E.; Foley, K.O. Effect of cadence, cycling experience, and aerobic power on delta efficiency during cycling. Med. Sci. Sport. Exerc. 2000, 32, 1630–1634. [Google Scholar] [CrossRef]
- Hansen, E.A.; Smith, G. Factors affecting cadence choice during submaximal cycling and cadence influence on performance. Int. J. Sport. Physiol. Perform. 2009, 4, 3–17. [Google Scholar] [CrossRef]
- Jin, H.; Jiang, Y.; Wei, Q.; Chen, L.; Ma, G. Effects of aerobic cycling training on cardiovascular fitness and heart rate recovery in patients with chronic stroke. NeuroRehabilitation 2013, 32, 327–335. [Google Scholar] [CrossRef]
- Malcolm, P.; Rossi, D.M.; Siviy, C.; Lee, S.; Quinlivan, B.T.; Grimmer, M.; Walsh, C.J. Continuous sweep versus discrete step protocols for studying effects of wearable robot assistance magnitude. J. Neuroeng. Rehabil. 2017, 14, 72. [Google Scholar] [CrossRef]
- Ding, Y.; Kim, M.; Kuindersma, S.; Walsh, C.J. Human-in-the-loop optimization of hip assistance with a soft exosuit during walking. Sci. Robot. 2018, 3, eaar5438. [Google Scholar] [CrossRef]
- Kim, M.; Ding, Y.; Malcolm, P.; Speeckaert, J.; Siviy, C.J.; Walsh, C.J.; Kuindersma, S. Human-in-the-loop Bayesian optimization of wearable device parameters. PLoS ONE 2017, 12, e0184054. [Google Scholar] [CrossRef] [PubMed]
- Gordon, D.F.N.; McGreavy, C.; Christou, A.; Vijayakumar, S. Human-in-the-Loop Optimization of Exoskeleton Assistance via Online Simulation of Metabolic Cost. IEEE Trans. Robot. 2022, 38, 1410–1429. [Google Scholar] [CrossRef]
- Zhang, J.; Fiers, P.; Witte, K.A.; Jackson, R.W.; Poggensee, K.L.; Atkeson, C.G.; Collins, S.H. Human-in-the-loop optimization of exoskeleton assistance during walking. Science 2017, 356, 1280–1284. [Google Scholar] [CrossRef] [PubMed]
- Brockway, J. Derivation of formulae used to calculate energy expenditure in man. Hum. Nutr. Clin. Nutr. 1987, 41, 463–471. [Google Scholar] [PubMed]
- Nassour, J.; Zhao, G.; Grimmer, M. Soft pneumatic elbow exoskeleton reduces the muscle activity, metabolic cost and fatigue during holding and carrying of loads. Sci. Rep. 2021, 11, 12556. [Google Scholar] [CrossRef]
- Lim, B.; Lee, J.; Jang, J.; Kim, K.; Park, Y.J.; Seo, K.; Shim, Y. Delayed output feedback control for gait assistance with a robotic hip exoskeleton. IEEE Trans. Robot. 2019, 35, 1055–1062. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sweep Session | HITL Session | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Transp. | P1 | P2 | P3 | P4 | P5 | Optimal | Transp. | w/o Exo | |
| Ave. crank ang. vel. [°/s] | 420 ± 10 | 415 ± 11 | 418 ± 11 | 424 ± 20 | 423 ± 21 | 420 ± 31 | 424 ± 13 | 420 ± 6 | 409 ± 13 |
| Max. motor torque [Nm] | - | 10.6 ± 0.2 | 10.3 ± 0.2 | 10.2 ± 0.1 | 10.3 ± 0.1 | 10.3 ± 0.0 | 10.4 ± 0.3 | - | - |
| Ave. motor power [W] | - | 13.1 ± 0.4 | 13 ± 0.3 | 12.8 ± 0.1 | 12.4 ± 0.2 | 11.5 ± 0.3 | 13.9 ± 1.1 | - | - |
| User | Sweep Session | Human-in-the-Loop Session | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Transp. | Minimum | Timing | Transp. | Transp. | Optimal | Timing | w/o | Transp. | w/o Exo | |
| [W/kg] | [W/kg] | Minimum | vs. | [W/kg] | [W/kg] | Optimal | Exo | vs. | vs. | |
| [%PS] | Minimum | [%PS] | [W/kg] | Optimal | Optimal | |||||
| [%] | [%] | [%] | ||||||||
| 1 | 4.9 ± 0.4 | 3.5 | 24.3 | −29.9 | 4.4 ± 0.6 | 2.8 ± 0.4 | 17.5 | 4.8 ± 0.7 | −36.1 | −41.5 |
| 2 | 4.5 ± 0.6 | 3.7 | 12.3 | −16.3 | 4.9 ± 0.5 | 3.8 ± 0.8 | 11.2 | 4.4 ± 0.7 | −22.0 | −13.5 |
| 3 | 5.3 ± 0.7 | 3.6 | 23.7 | −32.6 | 5.4 ± 0.6 | 3.5 ± 0.6 | 17.3 | 4.6 ± 0.8 | −36.0 | −24.2 |
| Average | 4.9 ± 0.4 | 3.6 ± 0.1 | 20.1 ± 6.8 | −26.3 ± 8.7 | 4.9 ± 0.5 | 3.4 ± 0.5 | 15.3 ± 3.6 | 4.6 ± 0.2 | −31.4 ± 8.1 | −26.4 ± 14.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grimmer, M.; Zhao, G. Hip Exoskeleton for Cycling Assistance. Bioengineering 2024, 11, 683. https://doi.org/10.3390/bioengineering11070683
Grimmer M, Zhao G. Hip Exoskeleton for Cycling Assistance. Bioengineering. 2024; 11(7):683. https://doi.org/10.3390/bioengineering11070683
Chicago/Turabian StyleGrimmer, Martin, and Guoping Zhao. 2024. "Hip Exoskeleton for Cycling Assistance" Bioengineering 11, no. 7: 683. https://doi.org/10.3390/bioengineering11070683
APA StyleGrimmer, M., & Zhao, G. (2024). Hip Exoskeleton for Cycling Assistance. Bioengineering, 11(7), 683. https://doi.org/10.3390/bioengineering11070683