1. Introduction
Gait analysis is the systematic study of locomotion of human legs during gait and can be used in both clinical and research settings, such as patient diagnostics and biomechanical studies. One of the dominant state-of-the-art technologies is optical marker-based motion capture (OMC) systems. Kinematic signals are determined computationally based on the tracked positions of reflective markers in three-dimensional space using multiple infrared cameras [
1]. Maintaining consistent environmental conditions is important, as factors such as lighting and reflective surfaces can affect the accuracy of dynamic measurements, so setup typically requires an expert and is time-consuming. These characteristics tend to tie OMC systems to laboratory conditions and associate them with high costs [
2].
In recent years, the field of gait analysis has witnessed a significant shift towards the development of more mobile solutions with the emergence of wearable technologies such as inertial measurement units (IMUs). These systems offer a promising alternative to traditional optical marker-based approaches for assessing human movement patterns, particularly in the context of measuring rotational knee kinematics [
3,
4,
5,
6]. IMU-based systems are associated with more affordable prices, are more user-friendly, have smaller dimensions, and are therefore particularly well-suited for capturing motion inside and outside of laboratory settings [
6,
7]. Their application usually relies on processing linear acceleration data collected using an accelerometer, and angular velocity data collected using a gyroscope, to then estimate joint kinematics using sensor fusion algorithms. One of the key benefits of IMU-based systems is thus their potential to make gait analysis more accessible and cost-effective, enabling their use outside of laboratory settings, potentially even as part of routine clinical patient pathways.
Prior to clinical application, any gait analysis system should be thoroughly validated [
8]. To that end, the accuracy of an IMU-based system to estimate knee joint angles was previously assessed using a six-degrees-of-freedom joint simulator [
9]. Guided by fluoroscopy-based signals originally captured in vivo, the simulator replicated the tibiofemoral motion of six total knee arthroplasty patients performing daily activities [
10], while excluding the possible influence of soft tissue artefact. Raw inertial data collected using a pair of IMUs attached to the simulator were then processed using a Rauch–Tung–Striebel smoother to derive flexion/extension, abduction/adduction, and internal/external tibial rotation based on IMU measurements. To evaluate differences between the simulator and IMU-based signals, the root-mean-square errors (RMSEs) between them were calculated. For level walking, results showed mean RMSEs of 0.7° ± 0.1° for flexion/extension, 0.6° ± 0.3° for abduction/adduction, and 0.9° ± 0.2° for external/internal rotation, indicating promising accuracy. Another study tested the algorithm against an optical marker-based system with single iterations of a loaded squat cycle simulated on seven cadaveric specimens on a force-controlled knee rig and achieved mean RMSE values after aligning the underlying reference frames of 4.2° ± 3.6°, 0.9° ± 0.4°, and 1.5° ± 0.7° for flexion/extension, abduction/adduction, and external/internal rotation, respectively [
11]. In a clinical setting, however, motion capture systems consisting of skin-mounted sensors (whether optical or inertial) are usually subject to errors caused by non-rigid movements of the skin (and other soft tissue) relative to the underlying bone. This phenomenon, known as soft tissue artefact (STA), can involve either (a) the collective displacement of a group of markers, or (b) the variation in individual inter-marker distances due to skin elasticity [
12,
13].
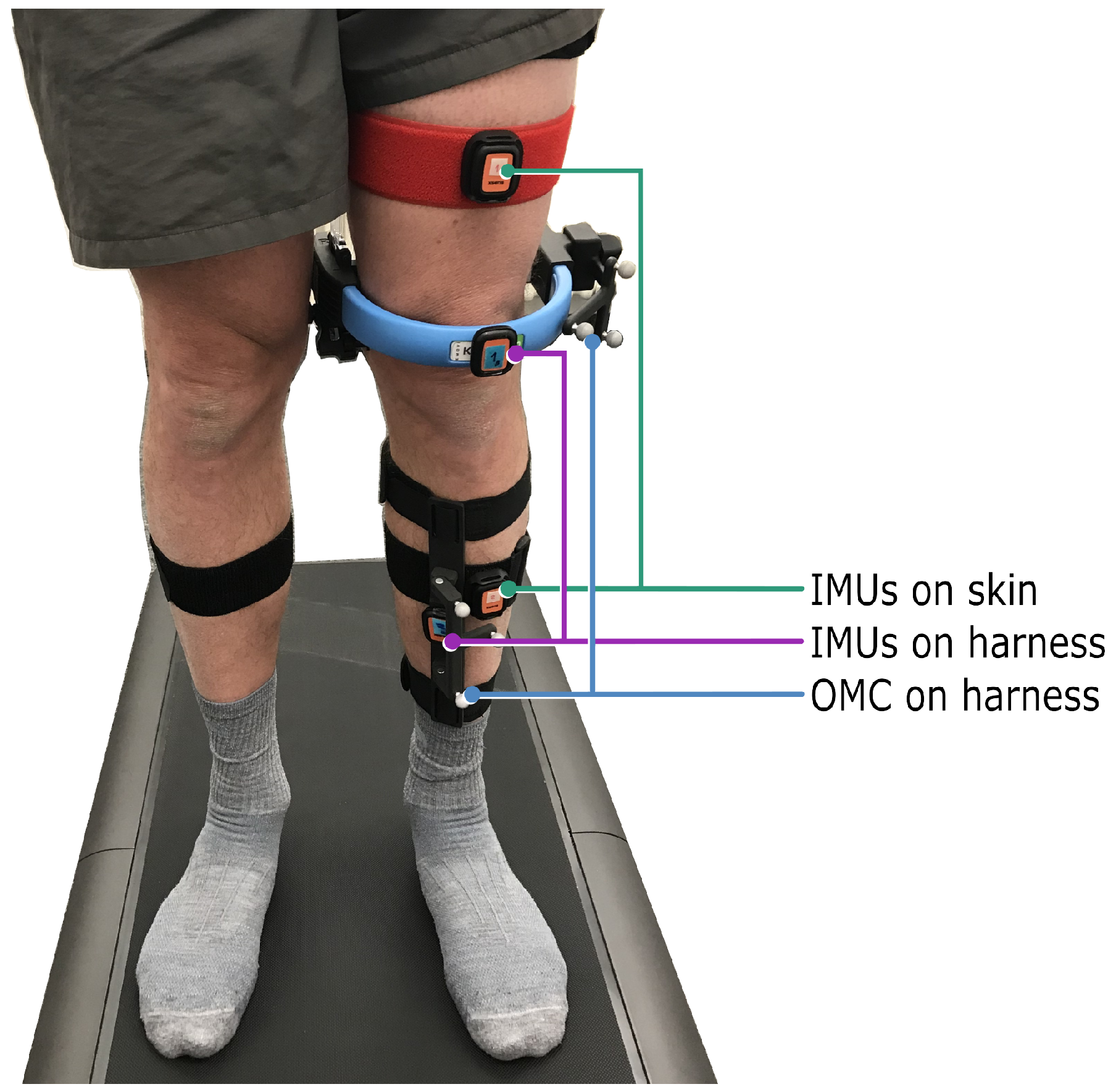
Consequently, a next step in the analytical validation of the described IMU-based knee kinematics analysis system is therefore to utilize the system in vivo, where results may be affected by errors due to STA. In the following study, we present an in vivo examination of IMU-based tibiofemoral kinematic estimates, considering two distinct configurations of IMU placement: (1) IMUs attached to a rigid harness (referred to as “IMUs on harness”, i.e., with harness fixation), and (2) IMUs mounted “on the skin” using elastic hook-and-loop bands (referred to as “IMUs on skin”, i.e., without harness fixation). (Note that “IMUs on skin” were technically not directly adhered onto the skin). Both datasets were then compared against a reference signal calculated from optical markers attached to the rigid harness (“OMC on harness”, i.e., the KneeKG system) [
14,
15,
16]. The underlying sensor fusion algorithm used to calculate the IMU-based knee joint angle estimates presented here was based on Ortigas-Vásquez et al.’s adaptation [
9] of the approaches previously developed by Seel et al. [
3] and Versteyhe et al. [
17]. IMU-based knee joint angles were estimated using the previously tested adaptation of Rauch–Tung–Striebel smoothing, after which the REference FRame Alignment MEthod (REFRAME) [
18,
19] was implemented to account for differences in coordinate system orientations, thus enabling a more rigorous comparison between the three sets of kinematic data (IMUs on harness, IMUs on skin, OMC on harness). Previous studies implementing the REFRAME approach on IMU data tested either on a robotic joint simulator [
9] or on cadaveric specimens [
11]. This is thus the first study to account for potential differences in local segment reference frame orientations using an optimization-based approach such as REFRAME within an in vivo evaluation of IMU-based tibiofemoral kinematics against optical motion capture.
3. Results
For the mean across all knees and cycles, minor differences between the raw kinematic signals (
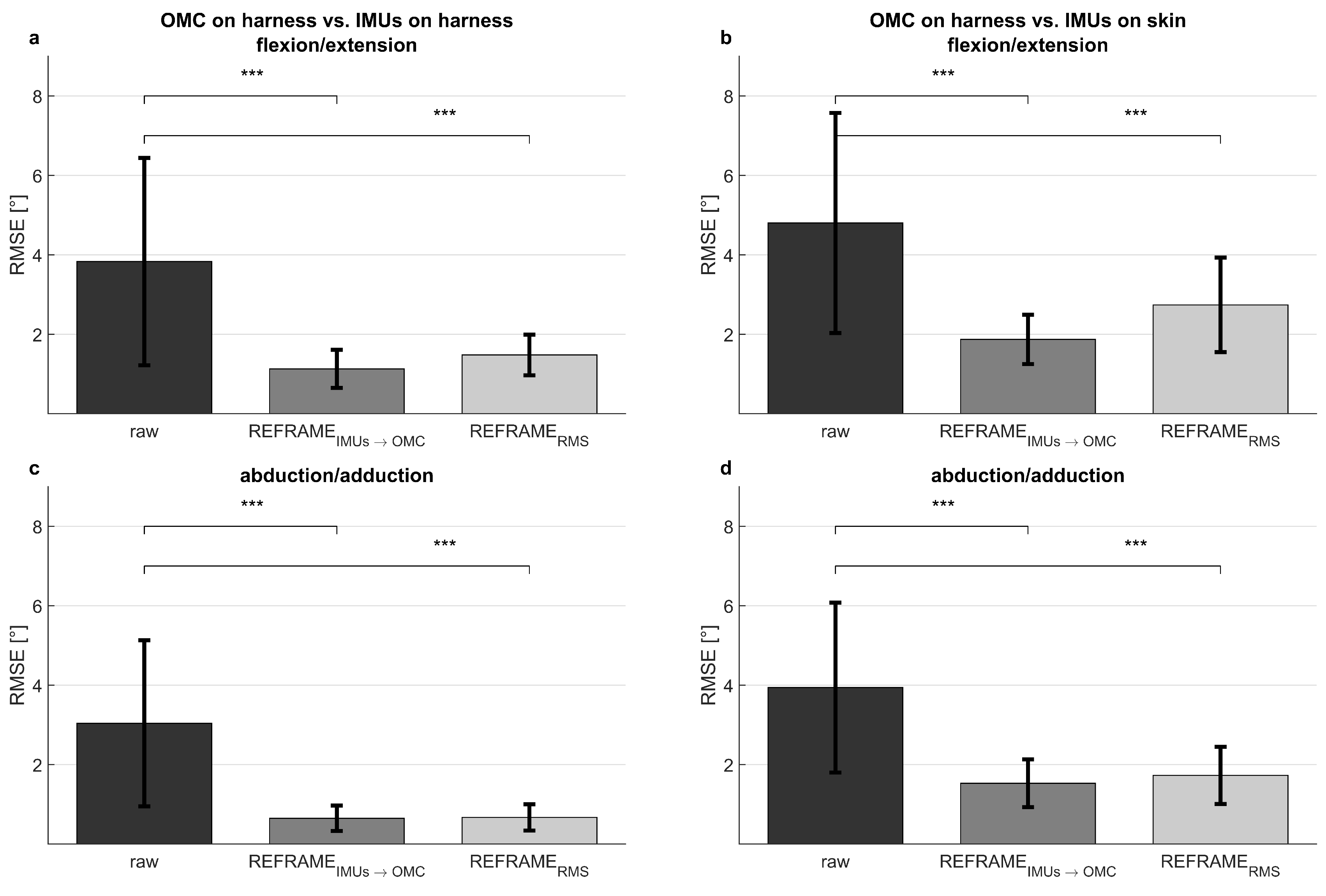
Figure 2, left column) from the IMUs on harness (purple) were observed versus the raw signals from OMC on harness (blue), in the frontal and transverse planes especially. Mean RMSEs between the two systems were 3.8° ± 2.6°, 3.0° ± 2.1°, and 5.1° ± 2.7°, for flexion/extension, abduction/adduction and external/internal rotation, respectively (
Table 2). Visibly larger differences could be observed between the IMUs on skin (green) and OMC on harness (blue) (also particularly for abduction/adduction and external/internal rotation) than between the IMUs on harness (purple) and OMC on harness (blue). Mean RMSEs between raw OMC on harness signals and raw IMUs on skin signals were 4.8° ± 2.8°, 3.9° ± 2.1°, and 6.5° ± 2.5°, for flexion/extension, abduction/adduction, and external/internal rotation, respectively (
Table 2). Analogous differences were more pronounced in participant-specific results (
Figure 3, left column), where mean values were affected by much smaller standard deviations (
Table 3). Furthermore, OMC on harness kinematic signals showed clear fluctuations upon heel strike for several knees (e.g.,
Figure 3; for more examples, see
Supplementary Materials). These fluctuations appeared highly repeatable, as demonstrated by the relatively small standard deviation across the trials (e.g.,
Table 3; for more examples see
Supplementary Materials).
The application of REFRAME
IMU→OMC (
Figure 2, middle column) resulted in a decrease in mean RMSEs between the OMC on harness (blue) and the IMUs on harness (purple) from 3.8° to 1.1° for flexion/extension, from 3.0° to 0.6° for abduction/adduction, and from 5.1° to 0.9° for external/internal rotation (
Table 2). However, mean RMSEs between OMC on harness (blue) and IMUs on skin (green) after the application of REFRAME
IMU→OMC resulted in a comparably smaller decrease from 4.8° to 1.9° for flexion/extension, from 3.9° to 1.5° for abduction/adduction, and from 6.5° to 4.1° for external/internal rotation (
Figure 4). On average, the frame transformations executed under REFRAME
IMU→OMC consisted of rotating the local segment frames of the IMUs on harness by no more than 3° around any of the three axes (
Table 4). In contrast, the average frame transformations resulting from REFRAME
IMU→OMC for the local segment frames of the IMUs on skin were comparably larger, in some cases exceeding 5°. Notably, the large magnitude of standard deviations affecting these average transformations (
Table 5) was not present for participant-specific averages, where mean transformations were affected by much smaller standard deviations (
Supplementary Materials, e.g.,
Tables S25, S43, and S76).
Analogously, the implementation of REFRAME
RMS (
Figure 2, right column) resulted in a decrease in mean RMSEs between OMC on harness (blue) and the IMUs on harness (purple) from 3.8° to 1.5° for flexion/extension, from 3.0° to 0.7° for abduction/adduction, and from 5.1° to 0.9° for external/internal rotation (
Table 2). Application of REFRAME
RMS also led to a relatively smaller decrease in mean RMSEs between OMC on harness (blue) and the IMUs on skin (green), from 4.8° to 2.7° for flexion/extension, from 3.9° to 1.7° for abduction/adduction, and from 6.5° to 4.0° for external/internal rotation. Notably, all changes in mean RMSEs were found to be statistically significant even after Bonferroni correction (
Figure 4;
Supplementary Materials Tables S121 and S122). Similar results were once again more evident for knee-specific averages (
Figure 3, right column;
Table 3). The transformations executed under REFRAME
RMS were lowest for OMC on harness and IMUs on harness, compared to those applied to IMUs on skin (
Table 6). Once again, participant-specific transformations demonstrated much smaller standard deviations (e.g.,
Table 7,
Supplementary Materials Tables S26, S35, and S101) than inter-participant averages.
4. Discussion
Despite showing promising results [
3,
4,
5,
31,
34], further validation of IMU-based motion capture systems is needed before they are widely used in clinics. Previously [
9], a sensor fusion algorithm based on Rauch–Tung–Striebel smoothing [
17] was assessed under ideal conditions (i.e., in the absence of STA) using a robotic simulator. In this study, we tested the same IMU-based system in vivo, under the presence of STA, against an optical harness-based reference system.
Both IMU- and optical marker-based motion capture systems aim to characterize the relative motion of the underlying bony segments. To achieve this non-invasively, the systems track (optical or inertial) sensors attached (non-rigidly) to the relevant segments. Any displacement of the sensors relative to the underlying bones therefore results in motion artefacts, which in this context referred not only to STA caused by the movement of skin, muscle, etc., but also displacements of the sensor fixation device (e.g., harness). Here, the IMU system was tested in two distinct configurations (attached to a rigid harness or, alternatively, to the skin using elastic hook-and-loop straps;
Figure 1), and differences between the resulting knee kinematic signals were evaluated against a harness-based optical reference system.
A preliminary assessment of the raw tibiofemoral kinematic signals obtained using each IMU configuration revealed visible differences against the optical reference. These differences could stem from a number of sources, especially STA and/or cross-talk effects. In the previous study [
9], the IMU-based system characterized rotational knee kinematics during simulated level walking with less than 1° of error in the absence of STA. Given our cohort’s normal average BMI of 23.7
, STA magnitudes could reasonably be expected to reach 5° [
35,
36]. Although average RMSE values between IMUs on skin and the optical reference were roughly within that range, peak RMSEs clearly exceeded these values (>10°,
Supplementary Materials; Tables S1 and S2), indicating that error sources beyond STA could be present. For IMUs on harness vs. OMC on harness, motion artefacts between systems could even be excluded, as both inertial sensors and optical markers were fixed to the same rigid brace, so peak RMSEs over 10° suggested that cross-talk effects were likely also present.
As described by Hagemeister et al., the optical reference system leveraged joint axes that involved some level of functional calibration, but were still largely dependent on the manual identification of the 3D coordinates of key anatomical landmarks in a laboratory reference frame [
15]. On the other hand, the joint axes implemented by the IMU-based system were based only on the available gyroscope and accelerometer data (as the position/orientation of bony points relative to the sensor positions/orientations were not directly measured) and were thus entirely functional [
3,
9,
17]. The joint axes estimated by the different systems were therefore likely similar, but not perfectly coincident [
37,
38]. Previous work has demonstrated that even very minor differences in joint axis definition leads to considerable artefacts on kinematic signals [
18,
37,
38,
39]. We therefore re-assessed signal differences after two distinct implementations of a REference FRame Alignment MEthod (REFRAME) [
18] to address such discrepancies in joint axis definition.
In order to address differences in joint axis orientations, REFRAME
IMU→OMC was applied to the set of kinematic signals stemming from each of the two IMU configurations (on harness and on skin) in turn. The underlying goal of this first REFRAME implementation was to re-align the IMU-based local segment reference frames to minimize the RMSE between IMU-based joint angles against the optical reference. The required transformations ranged from as little as 0.0° to as much as 31.0° (
Supplementary Table S1). In addition to a visible improvement in signal convergence, average RMSEs decreased to well below 2° for the IMUs on harness (
Table 2). The level of agreement observed after optimization suggested the underlying motion captured by both systems was highly comparable. Both the optical markers and the IMU sensors on the harness were effectively rigid relative to each other, so after frame alignment, the resulting signals were highly similar. However, average RMSEs between OMC on harness and IMUs on skin after REFRAME
IMU→OMC were higher (up to 5°;
Table 2), and clear disagreement remained between signals from the harness-mounted configurations and the skin-mounted IMU set up (
Figure 2, middle column;
Figure 3, middle column). The remaining differences could not plausibly stem from differences in frame alignment, so alternative sources of error, such as noise and/or measurement error, but especially differences in STA behavior, were suspected. The differences in these kinematic signals therefore indicated that tibiofemoral motion, as characterized by a harness-based system, was inherently different to that captured by a system using skin-mounted sensors. In contrast to the IMUs on harness, the IMUs on skin quantified the motion of the elastic hook-and-loop bands wrapped tightly around the limb segments (rather than the motion of the harness). Since the harness likely moved relative to the elastic hook-and-loop bands, even after reference frame alignment, the IMUs on skin and IMUs on harness did not quantify the same underlying movement pattern, and so those signals remained visibly different.
Even though the implementation of REFRAME
IMU→OMC revealed valuable new insights by characterizing the frame transformations needed to achieve maximum signal convergence, it inherently targeted the local frame orientations used by the OMC system, which we knew to also be error-prone (due to inaccurate palpation, marker placement, etc.). For example, in some cases, the OMC-based abduction/adduction signals were clearly dependent on flexion angle, a strong indicator of cross-talk (c.f. knees 10, 29, and 32 in
Supplementary Materials; Figures S10, S28, and S31, middle column). Moreover, this REFRAME configuration was not independent. In order to optimize one signal set, it relied on information contained within the other set. Consequently, we then implemented REFRAME
RMS, seeking to achieve a similar level of signal convergence using a strictly self-contained method. Mean RMSEs between OMC on harness and the IMUs on harness decreased after REFRAME
RMS, as did RMSEs between the OMC on harness and the IMUs on skin, although the latter did so to a lesser extent. Moreover, frame transformations implemented as part of REFRAME
RMS ranged from 0.0° to 32.7° (
Supplementary Table S2). The results of this second REFRAME implementation therefore corroborated our previous findings; inconsistencies in reference frame orientations could account for most, but not all, differences between systems, especially between IMUs on skin and the optical reference on harness.
Even after REFRAME implementation, certain differences between signals remained, most obviously between external/internal rotation signals (as reflected by RMSE values) of IMUs on skin and OMC on harness (and IMUs on harness as well) (c.f. knee 11 in
Supplementary Materials; Figure S11). A tendency to estimate larger ranges of axial rotation with the IMUs on skin was observed, although it remained unclear whether this reflected an overestimation of external/internal rotation by the IMUs on skin vs. an underestimation of this rotation by the harness-mounted sensors. Moreover, signals from harness-mounted systems often displayed characteristic fluctuations, sometimes throughout the entire cycle (c.f. knee 22 in
Supplementary Materials, Figure S21), or specifically upon heel strike for the OMC system (c.f. knee 17 in
Figure 3). Association with heel strike led us to hypothesize that the observed fluctuations could be due to the added mass of the harness, which interestingly was originally intended to reduce such artefacts [
14]. From a simplified spring–mass system perspective, heel strike can be thought of as representing a transformation of kinetic energy into spring potential, resulting in vibration of the harness, much like a mass on a spring. A larger mass would logically lead to a larger relative displacement, plausibly explaining the differences in relative motion between sensors on skin and sensors on harness. Notably, although the general movement patterns after REFRAME were essentially the same for both harness-mounted systems, heel-strike-related fluctuations were visible mostly on OMC on harness signals only (and not on IMUs on harness signals). We hypothesized that this effect was likely associated with the use of Rauch–Tung–Striebel smoothing to estimate the knee joint angles from inertial data. As this method considered the levels of uncertainty associated with state variables at different timepoints, it was likely able to “reject” sensor measurements pointing to non-physiological movement patterns. Nevertheless, it remained unclear whether this smoothing effect could inadvertently discard real, relevant information (e.g., the presence of tremors in Parkinson’s patients).
The added mass of the harness was not the only concern associated with the OMC system. The brace was designed to act as a femoral “clamp”, where the lateral femoral attachment was meant to fit between the iliotibial band and the biceps femoralis tendon [
14]. This not only led to difficulties related to harness placement in some of the more athletic participants (for example, due to muscle size obstructing this “groove”), but also to reported participant discomfort during dynamic activities and therefore possible gait alterations of natural movement patterns [
40]. Although the system was only tested on a healthy population within this study, these effects would likely be exacerbated in a patient population displaying pathological patterns of gait. Notably, the technician supervising data collection mentioned noticing a visible reduction in flexion/extension range of motion between treadmill familiarization trials without the brace and data collection trials with the brace for several participants. We hypothesized that this could be associated with the lateral femoral attachment of the brace obstructing the motion of the iliotibial band, which would otherwise naturally move from being anterior to the lateral femoral epicondyle in full knee extension, to being posterior of the epicondyle with flexion [
41]. Moreover, the optical marker-based system used in this study required the use of a treadmill for level walking to ensure that all markers stayed within the cameras’ field of view during the entire activity. Although this did allow for controlling of gait speed, it was nevertheless yet another limitation of the optical system that could be tackled using inertial sensors. The optical system also specifically instructed users to walk on the treadmill with socks for “better visualization”, which could be considered by some to be suboptimal (vs. walking in athletic shoes or barefoot).
In addition to participant discomfort arising from the use of the rigid harness and other usability-related issues that could clearly be improved, further limitations were identified. In a recent study, we established post-processing methods to ensure that consistent reference frame poses would ideally achieve three objectives: (1) clinical interpretability, (2) consistent reference frame orientation and position regardless of initial frame choice, and (3) method independence [
11]. We concluded, however, that achieving all three was extremely challenging. REFRAME
RMS prioritized method independence to fulfill objective #3. In order to achieve a similar level of convergence as with REFRAME
IMU→OMC (and therefore attempt to fulfill objective #2), it was necessary to additionally target a common starting flexion angle of 0°. The comparably higher RMSE achieved in flexion/extension after REFRAME
RMS vs. REFRAME
IMU→OMC, however, suggested that this objective was only partially fulfilled. Moreover, the target of 0° flexion at heel strike was chosen arbitrarily and was kept consistent across trials and participants for convenience. Fulfilling the remaining goal of clinical interpretability (objective #1) would naturally require targeting a clinically accurate value instead, determined based on, e.g., a sagittal view standing X-ray (assuming that knee flexion angle at heel strike was consistent with knee flexion angle during neutral standing). Likewise, the minimization of abduction/adduction RMS as part of REFRAME
RMS favored a zero mean for that signal, possibly leading to the loss of information regarding, e.g., static varus/valgus alignment. Importantly, while our study systematically analyzed agreement between the optical and inertial systems, establishing which of the systems most accurately captured the true motion of the underlying knee joints was considered a philosophical question beyond the scope of this investigation. The present comparison against the harness-based optical marker system was meant strictly to put the IMU-based estimates into context, by comparing against an established system that is currently used by experts for gait analysis [
21,
22,
23]. It was certainly not meant to be an assessment of objective accuracy of the IMU-based system, as that would have required the use of, e.g., fluoroscopy to obtain soft-tissue-artefact-free kinematic measurements.
In conclusion, the negligible magnitude of the differences between the harness-mounted IMUs and the optical system after REFRAME conclusively demonstrated that the inertial-based system was capable of capturing the same underlying motion pattern as the optical-based system. On the other hand, the visible differences that remained between the skin-mounted IMUs and the optical reference indicated that the movement profile captured by the sensors on the harness was fundamentally different to that captured by IMUs on the skin, even after accounting for differences due to reference frame misalignment. This difference, however, did not conclusively indicate that the IMUs attached to the skin were subject to greater soft tissue artefact. In fact, the small fluctuations observed in the kinematic signals obtained from both the optical and inertial sensors that were fixed to the harness were suggestive of vibrations undergone by the rigid device upon heel strike, likely due to inertial effects resulting from its additional mass. Our study results propose that (1) the use of optical markers and camera systems can be successfully replaced by more cost-effective IMUs with similar accuracy (although further testing should more thoroughly assess performance in characterizing more complex activities and, e.g., pathological gait patterns), while (2) further investigation (especially in vivo and upon heel strike) against moving videofluoroscopy is recommended. Further testing should enable us to not only conclusively validate IMU-based knee kinematics, but also establish exactly how the kinematics captured using a rigid brace compare to the actual relative movement of the underlying bone segments.



 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}