
Usability and Feasibility Assessment of a Social Assistive Robot for the Older People: Results from the GUARDIAN Project

 ,
,  , ,
, ,  ,
,
Abstract
:1. Introduction
1.1. Background
1.2. The GUARDIAN Project
1.3. Aim of the Paper
1.4. Structure of the Paper
2. Materials and Methods
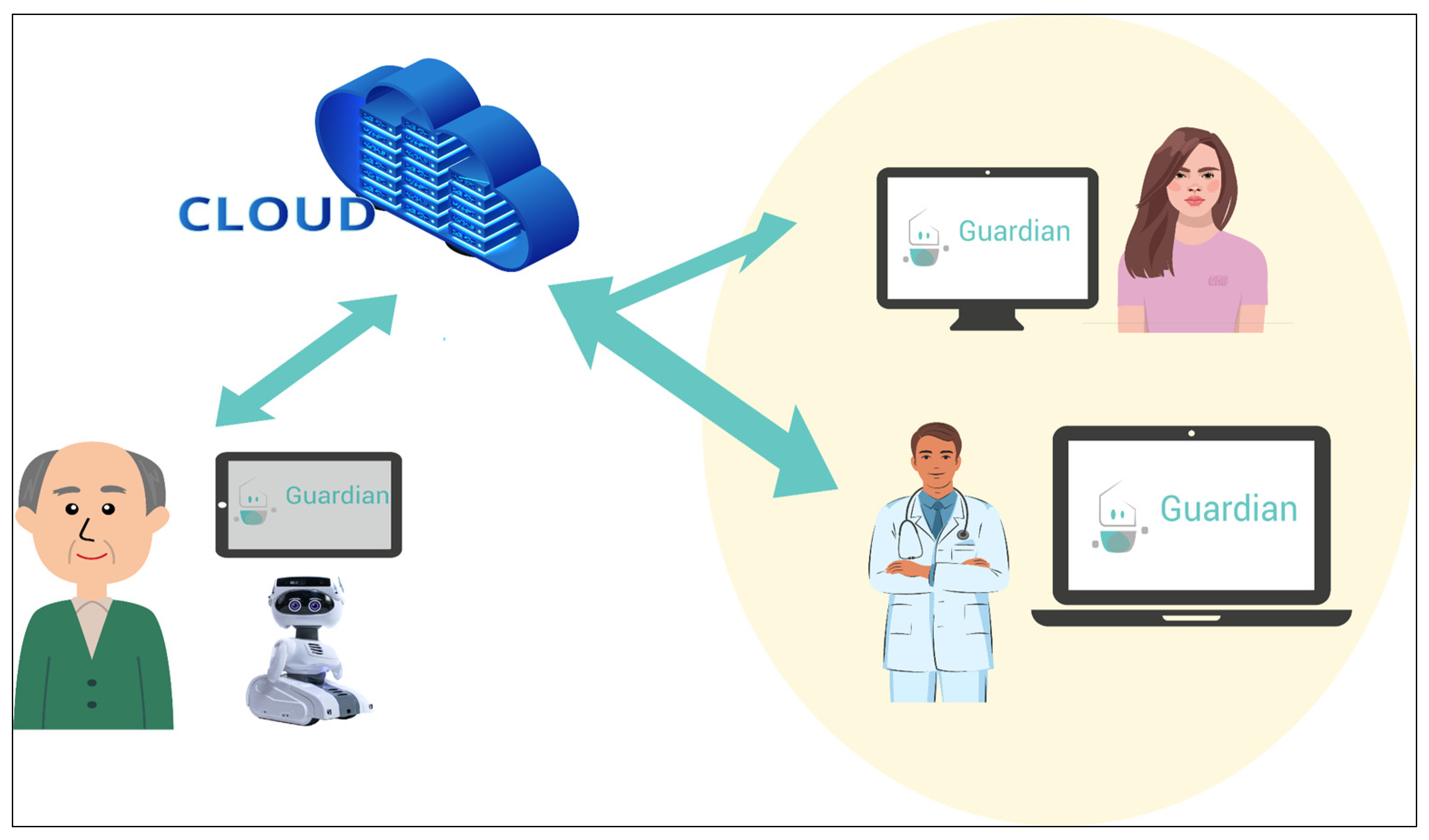
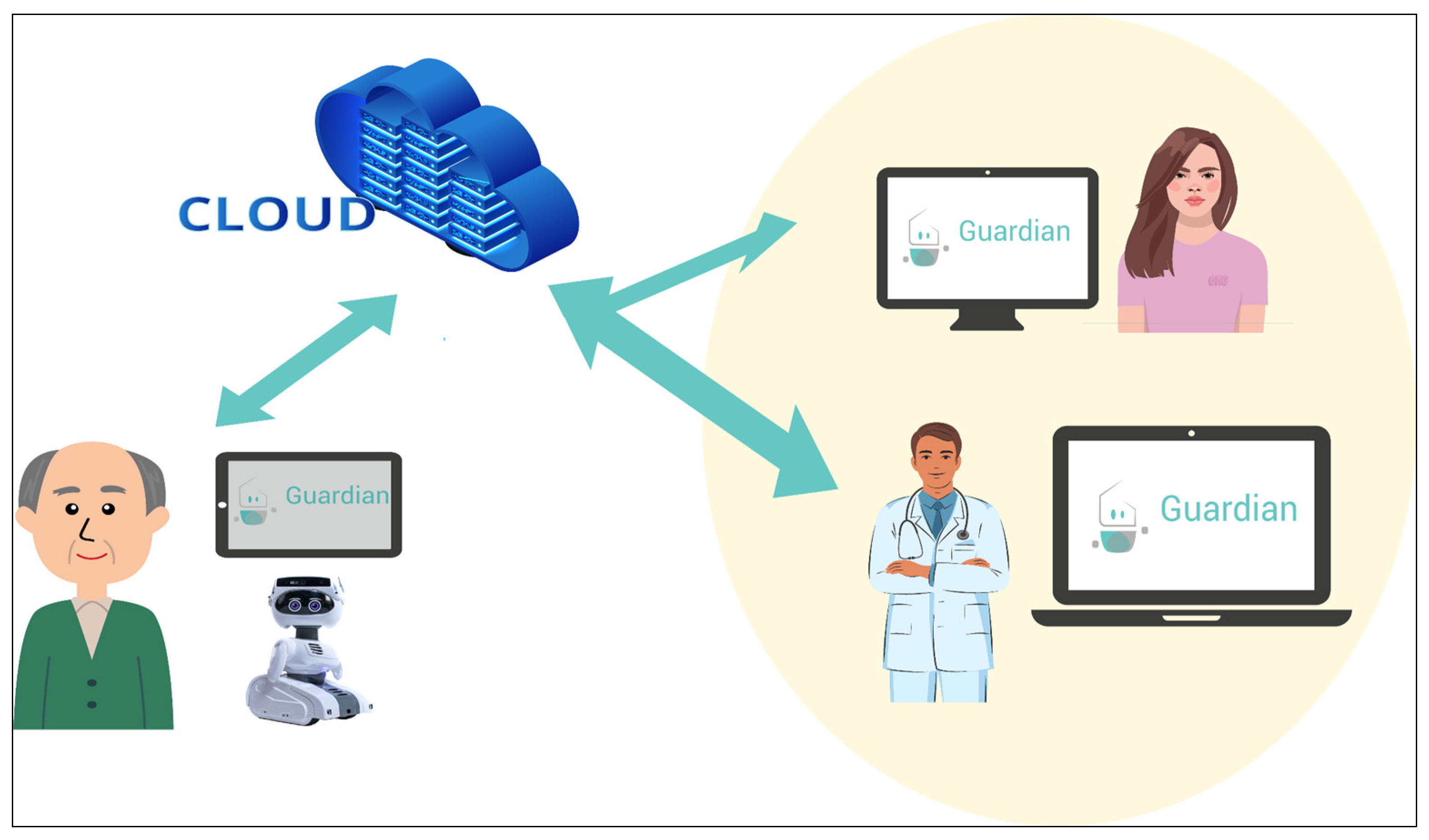
2.1. GUARDIAN Prototype 3
2.1.1. Smart Reminder System
- Reminder delay: specifies how long to delay the next reminder.
- Maximum snoozes: determines the maximum number of times a user can snooze a reminder (with the option to set it to 0 to disable snoozing).
- Past reminder time: tracks how many times the reminder has already been displayed.
2.1.2. Eye Contact Skill
- the intensity of the “look around” behavior was reduced in response to feedback indicating that it was perceived as excessive and made some individuals feel overly scrutinized. In P3, the robot now performs the “look around” action only once before returning to standby mode more promptly.
- the implementation of a sleep mode, allowing the robot to become unresponsive and refrain from providing messages. This feature is user-controlled, as opposed to autonomous control: when the robot is in sleep mode or engaged with the senior app, the eye contact skill is deactivated. In idle periods, the eye contact skill is activated, and the robot can operate in standby, normal, or alert modes. The new standby state excludes the “look around” behavior, but portrays a slightly sleepy expression, in contrast to being completely asleep when the system-wide sleep mode is activated. In Table 2 the different states of the eye contact skill are reported along with the associated functionalities:
2.1.3. Sleep Mode
2.2. Study Design
2.3. Inclusion and Exclusion Criteria
- Older adults:
- Aged over 65 years old;
- No previous diagnosis of mild cognitive impairment or dementia;
- Cognitive integrity (Mini Mental State Examination ≥ 24);
- Have an informal caregiver;
- Healthy sight and hearing;
- Good written and oral comprehension of the local language.
- 2.
- Informal caregivers:
- Relatives or close friends of a senior;
- Providing frequent support/care on a daily or weekly basis;
- Aged more than 18 years old.
- 3.
- Formal caregivers:
- Home care nurses, general practitioners, or health professionals involved in the daily/weekly care of a frail senior;
- At least 1 year of work experience.
2.4. Participants’ Involvement
2.5. Scales and Questionnaires
2.6. Statistical Analysis
2.7. Ethical Approval
3. Results
3.1. Participants
3.2. Usability Results
3.3. Robot User Friendliness
3.4. Impact on Daily Life
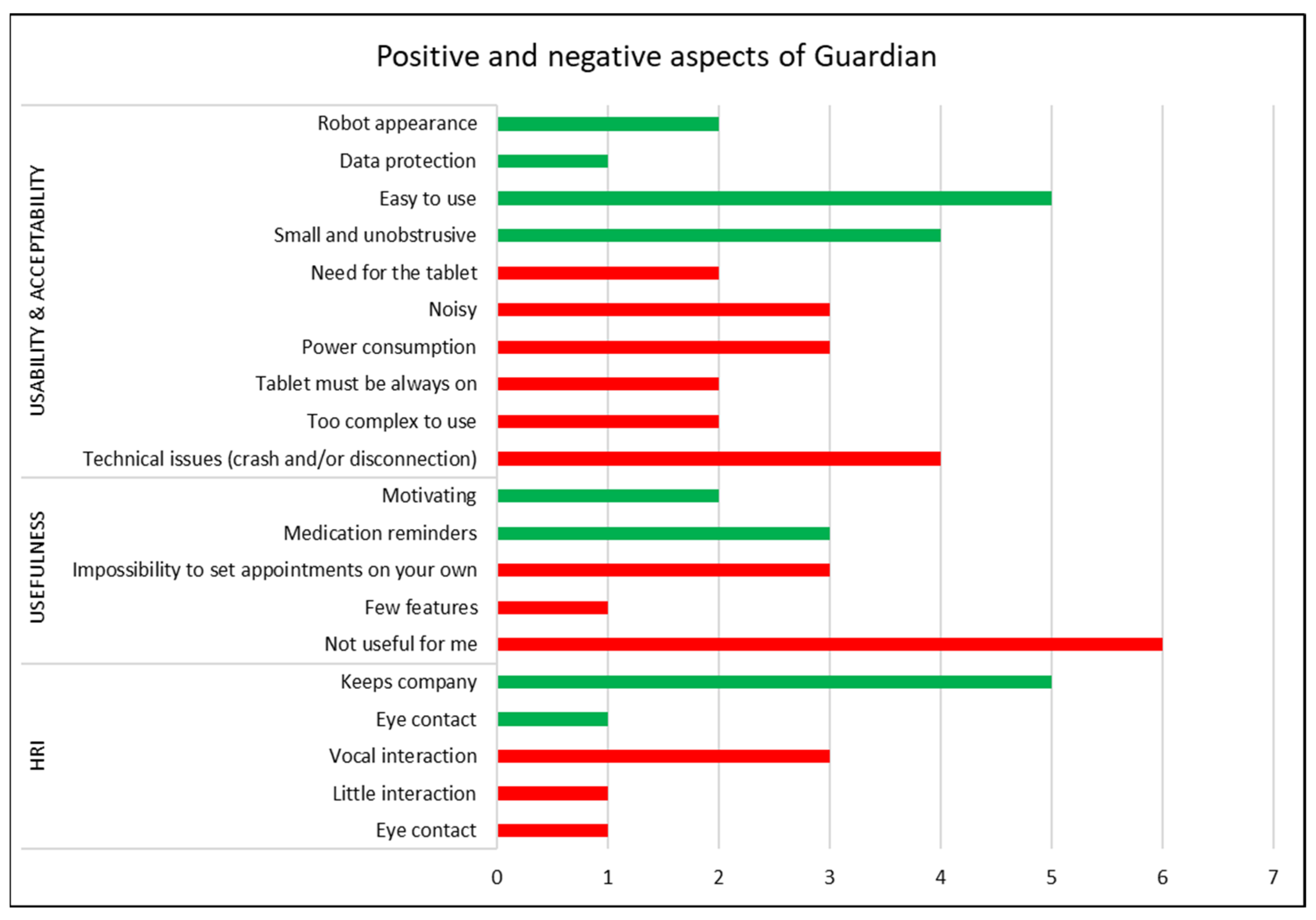
3.5. Qualitative Results
4. Discussion
4.1. Lessons Learnt
4.2. Limitations
4.3. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- ISTAT. Available online: https://www.istat.it/demografiadelleuropa/bloc-1c.html?lang=it (accessed on 16 November 2023).
- Gagliardi, C.; Piccinini, F.; Lamura, G.; Casanova, G.; Fabbietti, P.; Socci, M. The Burden of Caring for Dependent Older People and the Resultant Risk of Depression in Family Primary Caregivers in Italy. Sustainability 2022, 14, 3375. [Google Scholar] [CrossRef]
- ISTAT. Available online: https://www.istat.it/it/archivio/14562 (accessed on 16 November 2023).
- Bevilacqua, R.; Casaccia, S.; Cortellessa, G.; Astell, A.; Lattanzio, F.; Corsonello, A.; D’Ascoli, P.; Paolini, S.; Di Rosa, M.; Rossi, L.; et al. Coaching Through Technology: A Systematic Review into Efficacy and Effectiveness for the Ageing Population. Int. J. Environ. Res. Public Health 2020, 17, 5930. [Google Scholar] [CrossRef]
- McKee, K.; Matlabi, H.; Parker, S.G. Older People’s Quality of Life and Role of Home-Based Technology. Health Promot. Perspect. 2012, 2, 1–8. [Google Scholar] [CrossRef]
- Stara, V.; Soraci, L.; Takano, E.; Kondo, I.; Möller, J.; Maranesi, E.; Luzi, R.; Riccardi, G.R.; Browne, R.; Dacunha, S.; et al. Intrinsic Capacity and Active and Healthy Aging Domains Supported by Personalized Digital Coaching: Survey Study among Geriatricians in Europe and Japan on eHealth Opportunities for Older Adults. J. Med. Internet Res. 2023, 25, e41035. [Google Scholar] [CrossRef]
- Bevilacqua, R.; Maranesi, E.; Felici, E.; Margaritini, A.; Amabili, G.; Barbarossa, F.; Bonfigli, A.R.; Pelliccioni, G.; Paciaroni, L. Social robotics to support older people with dementia: A study protocol with Paro seal robot in an Italian Alzheimer’s day center. Front. Public Health 2023, 11, 1141460. [Google Scholar] [CrossRef]
- Lu, L.C.; Lan, S.H.; Hsieh, Y.P.; Lin, L.Y.; Lan, S.J.; Chen, J.C. Effectiveness of Companion Robot Care for Dementia: A Systematic Review and Meta-Analysis. Innov. Aging 2021, 5, igab013. [Google Scholar] [CrossRef]
- Bevilacqua, R.; Felici, E.; Cucchieri, G.; Amabili, G.; Margaritini, A.; Franceschetti, C.; Barboni, I.; Paolini, S.; Civerchia, P.; Raccichini, A.; et al. Results of the Italian RESILIEN-T Pilot Study: A Mobile Health Tool to Support Older People with Mild Cognitive Impairment. J. Clin. Med. 2023, 12, 6129. [Google Scholar] [CrossRef]
- Manca, M.; Paternò, F.; Santoro, C.; Zedda, E.; Braschi, C.; Franco, R.; Sale, A. The impact of serious games with humanoid robots on mild cognitive impairment older adults. Int. J. Hum. Comput. Stud. 2021, 145, 102509. [Google Scholar] [CrossRef]
- Rampioni, M.; Moșoi, A.A.; Rossi, L.; Moraru, S.-A.; Rosenberg, D.; Stara, V. A Qualitative Study toward Technologies for Active and Healthy Aging: A Thematic Analysis of Perspectives among Primary, Secondary, and Tertiary End Users. Int. J. Environ. Res. Public Health 2021, 18, 7489. [Google Scholar] [CrossRef] [PubMed]
- Fattah, S.M.M.; Sung, N.-M.; Ahn, I.-Y.; Ryu, M.; Yun, J. Building IoT Services for Aging in Place Using Standard-Based IoT Platforms and Heterogeneous IoT Products. Sensors 2017, 17, 2311. [Google Scholar] [CrossRef] [PubMed]
- Bevilacqua, R.; Felici, E.; Cavallo, F.; Amabili, G.; Maranesi, E. Designing Acceptable Robots for Assisting Older Adults: A Pilot Study on the Willingness to Interact. Int. J. Environ. Res. Public Health 2021, 18, 10686. [Google Scholar] [CrossRef]
- Cavallo, F.; Esposito, R.; Limosani, R.; Manzi, A.; Bevilacqua, R.; Felici, E.; Di Nuovo, A.; Cangelosi, A.; Lattanzio, F.; Dario, P. Robotic Services Acceptance in Smart Environments with Older Adults: User Satisfaction and Acceptability Study. J. Med. Internet Res. 2018, 20, e264. [Google Scholar] [CrossRef]
- Amabili, G.; Cucchieri, G.; Margaritini, A.; Benadduci, M.; Barbarossa, F.; Luzi, R.; Riccardi, G.R.; Pelliccioni, G.; Maranesi, E.; Bevilacqua, R. Social Robotics and Dementia: Results from the eWare Project in Supporting Older People and Their Informal Caregivers. Int. J. Environ. Res. Public Health 2022, 19, 13334. [Google Scholar] [CrossRef]
- McDonald, D.D.; Walsh, S.; Vergara, C.; Gifford, T.; Weiner, D.K. The effect of a Spanish virtual pain coach for older adults: A pilot study. Pain. Med. 2012, 13, 1397–1406. [Google Scholar] [CrossRef]
- Gaudiello, I.; Zibetti, E.; Lefort, S.; Chetouani, M.; Ivaldi, S. Trust as Indicator of Robot Functional and Social Acceptance. An Experimental Study on User Conformation to Icub Answers. Comput. Human Behav. 2016, 61, 633–655. [Google Scholar] [CrossRef]
- Feil-Seifer, D.; Mataric, M. Defining socially assistive robotics. In Proceedings of the 9th International Conference on Rehabilitation Robotics, Chicago, IL, USA, 28 June–1 July 2005. [Google Scholar] [CrossRef]
- Abdi, J.; Al-Hindawi, A.; Ng, T.; Vizcaychipi, M.P. Scoping review on the use of socially assistive robot technology in elderly care. BMJ Open 2018, 8, e018815. [Google Scholar] [CrossRef]
- Ciuffreda, I.; Amabili, G.; Casaccia, S.; Benadduci, M.; Margaritini, A.; Maranesi, E.; Marconi, F.; De Masi, A.; Alberts, J.; de Koning, J.; et al. Design and Development of a Technological Platform Based on a Sensorized Social Robot for Supporting Older Adults and Caregivers: GUARDIAN Ecosystem. Int. J. Soc. Robot. 2023, 1–20. [Google Scholar] [CrossRef]
- Naveira, A.V.; Masi, A.D.; Wacb, K.; Amabili, G.; Vastenburg, M.; Alberts, J.; Lovis, C. Designing a Social Robot Companion to Support Homecare: Usability Results. In Advances in Informatics, Management and Technology in Healthcare; Mantas, J., Gallos, P., Zoulias, E., Hasman, A., Househ, M.S., Diomidous, M., Liaskos, J., Charalampidou, M., Eds.; IOS Press: Amsterdam, The Netherlands, 2022; Volume 295, pp. 261–264. [Google Scholar] [CrossRef]
- Kim, T.K. T test as a parametric statistic. Korean J. Anesthesiol. 2015, 6, 540–546. [Google Scholar] [CrossRef] [PubMed]
- Mann, H.B.; Whitney, D.R. On a test of whether one of two random variables is stochastically larger than the other. Ann. Math. Stat. 1947, 18, 50–60. [Google Scholar] [CrossRef]
- World Medical Association. World Medical Association Declaration of Helsinki: Ethical principles for medical research involving human subjects. JAMA 2013, 310, 2191–2194. [Google Scholar] [CrossRef]
- Margaritini, A.; Benadduci, M.; Amabili, G.; Bonfigli, A.R.; Luzi, R.; Wac, K.; Nap, H.H.; Maranesi, E.; Bevilacqua, R. The social robot companion to support homecare nurses: The GUARDIAN study protocol. Contemp. Clin. Trials Commun. 2022, 30, 101024. [Google Scholar] [CrossRef] [PubMed]
- Bedaf, S.; Marti, P.; De Witte, L. What are the preferred characteristics of a service robot for the elderly? A multi-country focus group study with older adults and caregivers. Assist. Technol. 2019, 31, 147–157. [Google Scholar] [CrossRef]
- Boumans, R.; van Meulen, F.; Hindriks, K.; Mark Neerincx, M.; Olde Rikkert, M. Robot for health data acquisition among older adults: A pilot randomised controlled cross-over trial. BMJ Qual. Saf. 2019, 28, 793–799. [Google Scholar] [CrossRef]
- Pu, L.; Moyle, W.; Jones, C.; Todorovic, M. The Effectiveness of Social Robots for Older Adults: A Systematic Review and Meta-Analysis of Randomized Controlled Studies. Gerontologist 2019, 59, 37–51. [Google Scholar] [CrossRef]
- Lee, M.; Tran, D.T.; Lee, J.H. 3D Facial Pain Expression for a Care Training Assistant Robot in an Elderly Care Education Environment. Front. Robot. AI 2021, 8, 632015. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
| Services | Technical Development |
|---|---|
| Take photo * | Integrated to audio-based location better locate the user. |
| Sleep mode | Prevent reminders and interaction when system is in sleep mode;Dark screen on the senior app. |
| Snooze function * | Added the possibility to snooze the reminder; Repeat reminder after half an hour no response is given. |
| Send message to the user * | The robot spoke aloud the messages sent. |
| Sense touch * | Touching the robot head it is possible to switch from sleep to active mode and viceversa. |
| Eye contact * | Robot moves and changes eye images as the user answers. |
| Variance in gestures and facial expression | More eye images and arm movements added. |
| Sleep mode * | The system is in power saving mode and it is not responsive |
| Follow up question | Added more answer options (also in case of positive answers) |
| State | Listen to MQQT Cloud Commands | Time to Revert to Lower State | Number of Times to Look Around | Facial Expression | Color of Chest Led | Face Detection |
|---|---|---|---|---|---|---|
| OFF/Standby | Yes | - | - | - | Off | - |
| ON/Normal Alert | Yes | 20 s | 2 | White | Yes | |
| Yes | 10 s | 3 | Green | Yes |
| Monitoring and Reminders Action | Functions | Developed Movement | Animated Eye Images |
|---|---|---|---|
| Well-being | When the robot understands: “yes” | Move the head up and down and then return to the neutral position (3 s). |  |
| Medication | When the robot asks for medication report |  | |
| When the robot understands that the senior has taken the medications | Move the head up and down and then return to the neutral position (3 s). |  | |
| Meal | When the robot asks for meals report | Both hands in the air for 4 s. After the default condition. |  |
| Sleep | When the robot asks for a sleep report | Left arm up and after 3 s neutral position |  |
| Arms up and down and after 3 s neutral position |  | ||
| Activity suggestions | When the robot suggests activities | Both hand in the air and after 3 s neutral position |  |
| Extra features | When the robot activates the localization | Look right, center, left and after 3 s neutral head position |  |
| Sleep mode | Simulate a sleep mode Move the head down | Simulate a sleep mode Move the head down |  |
| Phase | Data | Older Adults | Informal Caregivers | Formal Caregivers |
|---|---|---|---|---|
| Alpha | Participants, n | 5 | 5 | 1 |
| Age (years), mean (SD) | 74.4 (8.9) | 39.6 (13.7) | 30 | |
| MMSE, mean (SD) | 27.6 (2.3) | - | - | |
| Female, n (%) | 4 (80%) | 3 (60%) | 0 (0%) | |
| Male, n (%) | 1 (20%) | 2 (40%) | 1 (100%) | |
| Living alone, n (%) | 2 (40%) | - | - | |
| Educational level, mean (SD) | 3.6 (1.1) | 4.8 (0.4) | 5.0 | |
| Technological competence, mean (SD) | 3.6 (1.3) | 4.6 (0.5) | 5.0 | |
| Beta | Participants | 10 | 10 | 10 |
| Age (years), mean (SD) | 75.4 (5.8) | 47.9 (10.5) | 39.3 (13.0) | |
| MMSE, mean (SD) | 29.9 (0.3) | - | - | |
| Female, n | 5 (50%) | 5 (50%) | 5 (50%) | |
| Male, n | 5 (50%) | 5 (50%) | 5 (50%) | |
| Living alone, n (%) | 3 (30%) | - | - | |
| Educational level, mean (SD) | 3.2 (1.3) | 4.3 (0.7) | 4.8 (0.4) | |
| Technological competence, mean (SD) | 3.3 (1.7) | 4.6 (0.7) | 4.6 (0.5) | |
| Total | Participants, n | 15 | 15 | 11 |
| Female, n (%) | 9 (60%) | 8 (53.3%) | 5 (45.5%) | |
| Male, n (%) | 6 (40%) | 7 (46.7%) | 6 (54.5%) |
| Items | P2 | P3 | |
|---|---|---|---|
| Mean (SD) | Mean (SD) | Diff | |
| Overall, I am satisfied with how easy it is to use. | 5.40 (2.61) | 5.11 (1.27) | −0.29 |
| It was simple to use. | 5.20 (2.49) | 5.11 (1.27) | −0.09 |
| I could (effectively) successfully complete the tasks and scenarios using the system. | 5.60 (2.61) | 4.56 (1.88) | −1.04 |
| I was able to complete the tasks and scenarios quickly using the system. | 5.20 (1.92) | 4.78 (1.79) | −1.42 |
| I was able to efficiently complete the tasks and scenarios using the system. | 5.20 (1.92) | 4.78 (1.79) | −1.42 |
| I feel comfortable using the system. | 4.80 (2.68) | 6.11 (0.78) | +1.31 |
| It was easy to learn to use. | 4.80 (2.68) | 5.44 (1.01) | +0.64 |
| I believe I could become productive quickly using the system. | 5.40 (1.34) | 4.00 (1.32) | −1.40 |
| The system gave error messages that clearly told me how to fix problems. | 4.60 (3.29) | 1.56 (0.73) | −3.04 |
| Whenever I made a mistake, I could recover easily and quickly * | 4.60 (2.30) | 3.56 (1.42) | −1.04 |
| The information (such as online help, on-screen messages) provided was clear. | 3.40 (3.29) | 4.44 (1.81) | +1.04 |
| It was easy to find the information I needed. | 4.20 (2.17) | 5.56 (0.88) | +1.36 |
| The information provided was easy to understand. | 4.50 (2.65) | 6.11 (0.78) | +1.61 |
| The information was effective in helping me complete the tasks and scenarios. | 4.20 (2.28) | 5.33 (0.87) | +1.13 |
| The organization of information on screens was clear. | 4.60 (3.29) | 6.33 (0.50) | +1.73 |
| The interface was pleasant. | 4.00 (2.55) | 6.56 (0.73) | +2.56 |
| I liked using the interface of the system. * | 3.60 (1.95) | 5.33 (1.50) | +1.73 |
| Overall, I am satisfied with the system. | 4.60 (1.34) | 3.89 (1.60) | −0.71 |
| This system has all the functions and capabilities I expect it to have. | 4.60 (2.88) | 2.44 (0.88) | −2.16 |
| Items | P2 | P3 Bugs Fixed | |
|---|---|---|---|
| Mean (SD) | Mean (SD) | Diff | |
| Overall, I am satisfied with how easy it is to use. | 5.40 (2.61) | 5.75 (0.50) | 0.35 |
| It was simple to use. | 5.20 (2.49) | 5.75 (0.50) | 0.55 |
| I could (effectively) successfully complete the tasks and scenarios using the system. | 5.60 (2.61) | 5.75 (0.50) | 0.15 |
| I was able to complete the tasks and scenarios quickly using the system. | 5.20 (1.92) | 6.00 (0.00) | 0.80 |
| I was able to efficiently complete the tasks and scenarios using the system. | 5.20 (1.92) | 6.00 (0.00) | 0.80 |
| I feel comfortable using the system. | 4.80 (2.68) | 6.00 (0.00) | 1.20 |
| It was easy to learn to use. | 4.80 (2.68) | 5.75 (0.50) | 0.95 |
| I believe I could become productive quickly using the system. | 5.40 (1.34) | 5.00 (0.82) | −0.40 |
| The system gave error messages that clearly told me how to fix problems. | 4.60 (3.29) | 2.25 (0.50) | −2.32 |
| Whenever I made a mistake, I could recover easily and quickly. * | 4.60 (2.30) | 4.50 (1.00) | −0.10 |
| The information (such as online help, on-screen messages) provided was clear. | 3.40 (3.29) | 5.75 (0.96) | 2.35 |
| It was easy to find the information I needed. | 4.20 (2.17) | 5.75 (1.26) | 1.55 |
| The information provided was easy to understand. | 4.50 (2.65) | 6.00 (0.82) | 1.50 |
| The information was effective in helping me complete the tasks and scenarios. | 4.20 (2.28) | 6.00 (0.82) | 1.80 |
| The organization of information on screens was clear. * | 4.60 (3.29) | 6.50 (0.58) | 1.90 |
| The interface was pleasant. * | 4.00 (2.55) | 6.50 (0.58) | 2.50 |
| I liked using the interface of the system. * | 3.60 (1.95) | 5.50 (1.00) | 1.90 |
| Overall, I am satisfied with the system. | 4.60 (1.34) | 4.75 (1.50) | 0.15 |
| This system has all the functions and capabilities I expect it to have. | 4.60 (2.88) | 3.00 (0.82) | −1.60 |
| Statement | P3 with Bugs | P3 Bugs Fixed | Difference | P3 |
|---|---|---|---|---|
| Mean (SD) | Mean (SD) | Mean (SD) | ||
| It was easy to use the robot. | 3.40 (2.61) | 6.50 (0.58) | 3.10 | 4.78 (2.49) |
| I feel comfortable while using the robot. | 3.40 (2.61) | 6.25 (0.50) | 2.85 | 4.67 (2.40) |
| It was easy to learn it how to use the robot. | 4.20 (1.92) | 6.00 (0.82) | 1.80 | 5.00 (1.73) |
| The given information about the robot was easy to understand. | 5.20 (2.05) | 7.00 (0.00) | 1.80 | 6.00 (1.73) |
| The interface of the robot was pleasant. | 6.20 (1.10) | 6.75 (0.50) | 0.55 | 6.44 (0.88) |
| I liked to use the robot. | 3.00 (2.35) | 5.50 (0.58) | 2.50 | 4.11 (2.15) |
| The robot has all the features and capabilities I expected. | 2.80 (1.30) | 4.75 (0.96) | 1.95 | 3.67 (1.50) |
| The robot has an influence on me. | 1.80 (1.79) | 3.50 (0.58) | 1.70 | 2.56 (1.59) |
| The robot is important to me personally. | 1.80 (1.79) | 3.50 (1.00) | 1.70 | 2.56 (1.67) |
| The robot makes me reconsider certain habits such as my diet, exercise pattern or medication intake. | 1.6 (1.34) | 3.00 (1.41) | 1.40 | 2.22 (1.48) |
| Overall, I am satisfied with the robot. | 2.2 (2.17) | 5.00 (0.82) | 2.80 | 3.44 (2.19) |
| Statement | P3 with Bugs | P3 Bugs Fixed | Difference | Overall |
|---|---|---|---|---|
| Mean (SD) | Mean (SD) | Mean (SD) | ||
| Using GUARDIAN helps me take my medication on time. | 1.8 (1.3) | 3.5 (1.0) | 1.7 | 2.44 (1.51) |
| Using GUARDIAN encourages me to be more active. | 1.2 (0.4) | 2.0 (0.8) | 0.8 | 1.56 (0.73) |
| Using GUARDIAN helps me eat and/or drink enough. | 1.2 (0.4) | 2.0 (1.4) | 0.8 | 1.56 (1.01) |
| Using GUARDIAN makes me less lonely. | 1.8 (1.8) | 2.0 (1.2) | 0.2 | 1.89 (1.45) |
| Using GUARDIAN makes me more independent. | 1.2 (0.4) | 2.0 (0.8) | 0.8 | 1.56 (0.73) |
| GUARDIAN helps me have a daily routine. | 1.4 (0.9) | 2.3 (1.3) | 0.9 | 1.78 (1.09) |
| GUARDIAN helps me inform my caregivers about my well-being. | 1.6 (0.9) | 2.5 (1.3) | 0.9 | 2.00 (1.12) |
| Using GUARDIAN makes me feel safer. | 1.4 (0.9) | 2.3 (1.0) | 0.9 | 1.78 (0.97) |
| I feel confident while using GUARDIAN. | 3.2 (0.4) | 3.8 (0.5) | 0.6 | 3.44 (0.53) |
| Overall, I am satisfied with GUARDIAN. | 1.8 (1.3) | 3.5 (1.0) | 1.7 | 3.00 (1.73) |
| Statement | P2 | P3 without Bugs | Difference |
|---|---|---|---|
| Mean (SD) | Mean (SD) | ||
| Using GUARDIAN helps me take my medication on time. | 3.60 (1.67) | 3.50 (1.00) | −0.10 |
| Using GUARDIAN encourages me to be more active. | 2.40 (1.34) | 2.00 (0.82) | −0.40 |
| Using GUARDIAN helps me eat and/or drink enough. | 2.00 (1.41) | 2.00 (1.41) | 0 |
| Using GUARDIAN makes me less lonely. | 3.40 (2.19) | 2.00 (1.15) | −1.40 |
| Using GUARDIAN makes me more independent. | 2.00 (1.73) | 2.00 (0.82) | 0 |
| GUARDIAN helps me have a daily routine. | 2.80 (1.79) | 2.25 (1.26) | −0.55 |
| GUARDIAN helps me inform my caregivers about my well-being. | 3.40 (3.40) | 2.50 (1.29) | −1.10 |
| Using GUARDIAN makes me feel safer. | - | 2.25 (0.96) | - |
| I feel confident while using GUARDIAN. | - | 3.75 (0.50) | - |
| Overall, I am satisfied with GUARDIAN. | - | 3.50 (1.00) | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amabili, G.; Maranesi, E.; Margaritini, A.; Benadduci, M.; Barbarossa, F.; Casaccia, S.; Nap, H.H.; Bevilacqua, R. Usability and Feasibility Assessment of a Social Assistive Robot for the Older People: Results from the GUARDIAN Project. Bioengineering 2024, 11, 20. https://doi.org/10.3390/bioengineering11010020
Amabili G, Maranesi E, Margaritini A, Benadduci M, Barbarossa F, Casaccia S, Nap HH, Bevilacqua R. Usability and Feasibility Assessment of a Social Assistive Robot for the Older People: Results from the GUARDIAN Project. Bioengineering. 2024; 11(1):20. https://doi.org/10.3390/bioengineering11010020
Chicago/Turabian StyleAmabili, Giulio, Elvira Maranesi, Arianna Margaritini, Marco Benadduci, Federico Barbarossa, Sara Casaccia, Henk Herman Nap, and Roberta Bevilacqua. 2024. "Usability and Feasibility Assessment of a Social Assistive Robot for the Older People: Results from the GUARDIAN Project" Bioengineering 11, no. 1: 20. https://doi.org/10.3390/bioengineering11010020
APA StyleAmabili, G., Maranesi, E., Margaritini, A., Benadduci, M., Barbarossa, F., Casaccia, S., Nap, H. H., & Bevilacqua, R. (2024). Usability and Feasibility Assessment of a Social Assistive Robot for the Older People: Results from the GUARDIAN Project. Bioengineering, 11(1), 20. https://doi.org/10.3390/bioengineering11010020