
Optimization Design and Performance Analysis of a Bionic Knee Joint Based on the Geared Five-Bar Mechanism
Abstract
1. Introduction
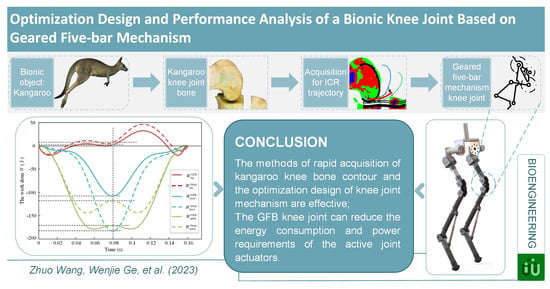
- Rapid acquisition for the ICR trajectory of the knee joint. Based on the image of the kangaroo leg bone, the contact curve between the kangaroo femur and tibia was automatically acquired using a high-order polynomial fitting method with computer image processing technology;
- Kangaroo-inspired knee joint mechanism design and optimization. The bionic knee joint was designed by a geared five-bar (GFB) mechanism with a single-degree-of-freedom and the parameters for each part of the mechanism were optimized. The ICR trajectory of the kangaroo knee joint was accurately tracked, and the rotation angles of the thigh and tibia in the designed mechanism were consistent with the motion data on the kangaroo lower limb;
- Performance analysis of the GFB joint during high-speed gaits. Based on the spring inverted pendulum model, the Newton–Euler recursive method was used to establish the dynamics model of the single leg of the robot in the landing stage and the centroid trajectory of the robot model was planned. The effects of the hinge joint mechanism and the GFB joint mechanism on the required driving power and energy consumption of the robot at high speed were compared and analyzed.
2. The Design and Modeling of a New Bionic Knee Joint Mechanism
2.1. The ICR Analysis of the Knee Joint of the Australian Grey Kangaroo
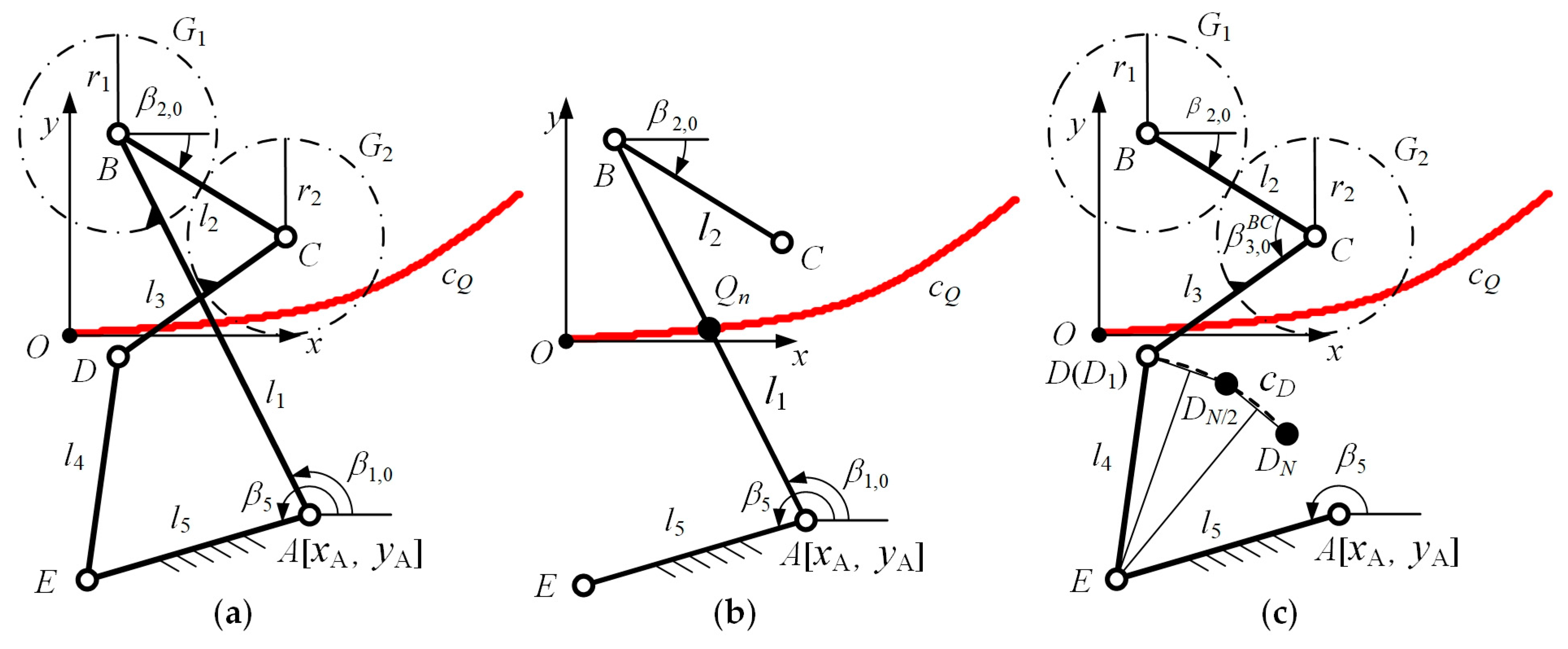
2.2. The Design and Optimization of the Bionic GFB Knee Joint Mechanism
3. The Analysis and Discussion of the Inverse Kinematics
3.1. The Modeling of the Single Leg for Robots
3.2. The Analysis of the TCM Trajectory
3.3. Inverse Kinematics Analysis
4. The Analysis and Discussion of the Inverse Dynamics
4.1. The Modeling of the Inverse Dynamics
4.2. Interpolation Process of the Dynamics
4.3. The Required Drive Torque of the Knee Joint
4.4. The Analysis of the Energy Cost and Power Requirement
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hutter, M.; Gehring, C.; Jud, D.; Lauber, A.; Bellicoso, C.D.; Tsounis, V.; Hwangbo, J.; Bodie, K.; Fankhauser, P.; Bloesch, M.; et al. ANYmal—A Highly Mobile and Dynamic Quadrupedal Robot. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 38–44. [Google Scholar] [CrossRef]
- Hutter, M.; Diethelm, R.; Bachmann, S.; Fankhauser, P.; Gehring, C.; Tsounis, V.; Lauber, A.; Guenther, F.; Bjelonic, M.; Isler, L.; et al. Towards a Generic Solution for Inspection of Industrial Sites. In Field and Service Robotics; Springer Proceedings in Advanced Robotics; Springer International Publishing: Cham, Switzerland, 2018; Volume 5, pp. 575–589. [Google Scholar] [CrossRef]
- Bellicoso, C.D.; Bjelonic, M.; Wellhausen, L.; Holtmann, K.; Günther, F.; Tranzatto, M.; Fankhauser, P.; Hutter, M. Advances in Real-World Applications for Legged Robots. J. Field Robot. 2018, 35, 1311–1326. [Google Scholar] [CrossRef]
- Davids, A. Urban Search and Rescue Robots: From Tragedy to Technology. IEEE Intell. Syst. 2002, 17, 81–83. [Google Scholar] [CrossRef]
- Klamt, T.; Schwarz, M.; Lenz, C.; Baccelliere, L.; Buongiorno, D.; Cichon, T.; DiGuardo, A.; Droeschel, D.; Gabardi, M.; Kamedula, M.; et al. Remote Mobile Manipulation with the Centauro Robot: Full-body Telepresence and Autonomous Operator Assistance. J. Field Robot. 2020, 37, 889–919. [Google Scholar] [CrossRef]
- Röning, J.; Kauppinen, M.; Pitkänen, V.; Kemppainen, A.; Tikanmäki, A. The Challenge of Preparing Teams for the European Robotics League: Emergency. In IS&T International Symposium on Electronic Imaging Science and Technology; IS&T Digital Library: Burlingame, CA, USA, 2017; pp. 22–30. [Google Scholar] [CrossRef]
- Winfield, A.F.T.; Franco, M.P.; Brueggemann, B.; Castro, A.; Limon, M.C.; Ferri, G.; Ferreira, F.; Liu, X.; Petillot, Y.; Roning, J.; et al. EuRathlon 2015: A Multi-Domain Multi-Robot Grand Challenge for Search and Rescue Robots. In Towards Autonomous Robotic Systems; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2016; Volume 9716, pp. 351–363. [Google Scholar] [CrossRef]
- Dietrich, A.; Bussmann, K.; Petit, F.; Kotyczka, P.; Ott, C.; Lohmann, B.; Albu-Schäffer, A. Whole-Body Impedance Control of Wheeled Mobile Manipulators: Stability Analysis and Experiments on the Humanoid Robot Rollin’ Justin. Auton. Robot. 2016, 40, 505–517. [Google Scholar] [CrossRef]
- Melson, G.F.; Kahn, P.H.; Beck, A.M.; Friedman, B.; Roberts, T.; Garrett, E. Robots as Dogs?: Children’s Interactions with the Robotic Dog AIBO and a Live Australian Shepherd. In CHI ’05 Extended Abstracts on Human Factors in Computing Systems; ACM: Portland, OR, USA, 2005; pp. 1649–1652. [Google Scholar] [CrossRef]
- Shigemi, S. ASIMO and Humanoid Robot Research at Honda. In Humanoid Robotics: A Reference; Springer: Dordrecht, The Netherlands, 2019; pp. 55–90. [Google Scholar] [CrossRef]
- Louie, D.R.; Eng, J.J. Powered Robotic Exoskeletons in Post-Stroke Rehabilitation of Gait: A Scoping Review. J. NeuroEng. Rehabil. 2016, 13, 53. [Google Scholar] [CrossRef] [PubMed]
- Yamamoto, K.; Ishii, M.; Hyodo, K.; Yoshimitsu, T.; Matsuo, T. Development of Power Assisting Suit (Miniaturization of Supply System to Realize Wearable Suit). JSME Int. J. Ser. C 2003, 46, 923–930. [Google Scholar] [CrossRef][Green Version]
- Farris, R.J.; Quintero, H.A.; Goldfarb, M. Preliminary Evaluation of a Powered Lower Limb Orthosis to Aid Walking in Paraplegic Individuals. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 652–659. [Google Scholar] [CrossRef]
- Settembre, N.; Maurice, P.; Paysant, J.; Theurel, J.; Claudon, L.; Kimmoun, A.; Levy, B.; Hani, H.; Chenuel, B.; Ivaldi, S. The Use of Exoskeletons to Help with Prone Positioning in the Intensive Care Unit during COVID-19. Ann. Phys. Rehabil. Med. 2020, 63, 379–382. [Google Scholar] [CrossRef]
- Boston Dynamics. Atlas. Available online: https://www.bostondynamics.com/atlas (accessed on 5 April 2023).
- Miki, T.; Lee, J.; Hwangbo, J.; Wellhausen, L.; Koltun, V.; Hutter, M. Learning Robust Perceptive Locomotion for Quadrupedal Robots in the Wild. Sci. Robot. 2022, 7, eabk2822. [Google Scholar] [CrossRef]
- Badri-Spröwitz, A.; Aghamaleki Sarvestani, A.; Sitti, M.; Daley, M.A. BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching. Sci. Robot. 2022, 7, eabg4055. [Google Scholar] [CrossRef]
- Seok, S.; Wang, A.; Chuah, M.Y.; Hyun, D.J.; Lee, J.; Otten, D.M.; Lang, J.H.; Kim, S. Design Principles for Energy-Efficient Legged Locomotion and Implementation on the MIT Cheetah Robot. IEEE/ASME Trans. Mechatron. 2015, 20, 1117–1129. [Google Scholar] [CrossRef]
- Wang, Z.; Kou, L.; Ke, W.; Chen, Y.; Bai, Y.; Li, Q.; Lu, D. A Spring Compensation Method for a Low-Cost Biped Robot Based on Whole Body Control. Biomimetics 2023, 8, 126. [Google Scholar] [CrossRef]
- Polet, D.T.; Bertram, J.E.A. An Inelastic Quadrupedal Model Discovers Four-Beat Walking, Two-Beat Running, and Pseudo-Elastic Actuation as Energetically Optimal. PLoS Comput. Biol. 2019, 15, e1007444. [Google Scholar] [CrossRef]
- Goswami, A.; Thuilot, B.; Espiau, B. A Study of the Passive Gait of a Compass-Like Biped Robot: Symmetry and Chaos. Int. J. Robot. Res. 1998, 17, 1282–1301. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, S.; Huang, B.; Luo, H.; Min, F. Forced Servoing of a Series Elastic Actuator Based on Link-Side Acceleration Measurement. Actuators 2023, 12, 126. [Google Scholar] [CrossRef]
- Katz, B.G. A Low Cost Modular Actuator for Dynamic Robots. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2018. [Google Scholar]
- Farve, N.N. Design of a Low-Mass High-Torque Brushless Motor for Application in Quadruped Robotics. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2012. [Google Scholar]
- Ishida, T.; Takanishi, A. A Robot Actuator Development with High Backdrivability. In Proceedings of the 2006 IEEE Conference on Robotics, Automation and Mechatronics, Bangkok, Thailand, 1–3 June 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Park, J.; Kim, K.-S.; Kim, S. Design of a Cat-Inspired Robotic Leg for Fast Running. Adv. Robot. 2014, 28, 1587–1598. [Google Scholar] [CrossRef]
- Shin, H.; Ishikawa, T.; Kamioka, T.; Hosoda, K.; Yoshiike, T. Mechanistic Properties of Five-Bar Parallel Mechanism for Leg Structure Based on Spring Loaded Inverted Pendulum. In 2019 IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids), Toronto, ON, Canada, 15–17 October 2019; IEEE: Toronto, ON, Canada, 2019; pp. 320–327. [Google Scholar] [CrossRef]
- Kenneally, G.; De, A.; Koditschek, D.E. Design Principles for a Family of Direct-Drive Legged Robots. IEEE Robot. Autom. Lett. 2016, 1, 900–907. [Google Scholar] [CrossRef]
- Wiczkowski, E.; Skiba, K. Kinetic analysis of the human knee joint. Biol. Sport 2008, 25, 77–91. [Google Scholar]
- Holden, J.P.; Stanhope, S.J. The Effect of Variation in Knee Center Location Estimates on Net Knee Joint Moments. Gait Posture 1998, 7, 1–6. [Google Scholar] [CrossRef]
- Gerber, C.; Matter, P. Biomechanical Analysis of the Knee after Rupture of the Anterior Cruciate Ligament and Its Primary Repair. An Instant-Centre Analysis of Function. J. Bone Jt. Surgery. Br. 1983, 65, 391–399. [Google Scholar] [CrossRef]
- Nägerl, H.; Dathe, H.; Fiedler, C.; Gowers, L.; Kirsch, S.; Kubein-Meesenburg, D.; Dumont, C.; Wachowski, M.M. The Morphology of the Articular Surfaces of Biological Knee Joints Provides Essential Guidance for the Construction of Functional Knee Endoprostheses. Acta Bioeng. Biomech. 2015, 17, 45–53. [Google Scholar]
- Hamon, A.; Aoustin, Y. Study of Different Structures of the Knee Joint for a Planar Bipedal Robot. In 2009 9th IEEE-RAS International Conference on Humanoid Robots, Paris, France, 7–10 December 2009; IEEE: Paris, France, 2009; pp. 113–120. [Google Scholar] [CrossRef]
- Aoustin, Y.; Hamon, A. Human like Trajectory Generation for a Biped Robot with a Four-Bar Linkage for the Knees. Robot. Auton. Syst. 2013, 61, 1717–1725. [Google Scholar] [CrossRef]
- Steele, A.G.; Hunt, A.; Etoundi, A.C. Development of a Bio-Inspired Knee Joint Mechanism for a Bipedal Robot. In Biomimetic and Biohybrid Systems; Mangan, Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2017; Volume 10384. [Google Scholar] [CrossRef]
- Liu, Y.; Zang, X.; Li, C.; Heng, S.; Lin, Z.; Zhao, J. Design and Control of a Pneumatic-Driven Biomimetic Knee Joint for Biped Robot. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017; pp. 70–75. [Google Scholar] [CrossRef]
- Olinski, M.; Gronowicz, A.; Ceccarelli, M. Development and Characterisation of a Controllable Adjustable Knee Joint Mechanism. Mech. Mach. Theory 2021, 155, 104101. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, E.; Wang, M.; Liu, S.; Ge, W. Design and Experimental Research of Knee Joint Prosthesis Based on Gait Acquisition Technology. Biomimetics 2021, 6, 28. [Google Scholar] [CrossRef]
- Anand, T.; Sujatha, S. A Method for Performance Comparison of Polycentric Knees and Its Application to the Design of a Knee for Developing Countries. Prosthet. Orthot. Int. 2017, 41, 402–411. [Google Scholar] [CrossRef] [PubMed]
- Sudeesh, S.; Sujatha, S.; Shunmugam, M.S. The Effects of Polycentric Knee Design and Alignment on Swing Phase Gait Parameters: A Simulation Approach. J. Prosthet. Orthot. 2021, 33, 266–278. [Google Scholar] [CrossRef]
- Dawson, T.J.; Taylor, C.R. Energetic Cost of Locomotion in Kangaroos. Nature 1973, 246, 313–314. [Google Scholar] [CrossRef]
- Nisell, R. Mechanics of the Knee: A Study of Joint and Muscle Load with Clinical Applications. Acta Orthop. Scand. 1985, 56 (Suppl. S216), 1–42. [Google Scholar] [CrossRef]
- Kangaroo Skeleton, Australian Museum. Available online: https://pbase.com/bmcmorrow/australianmuseum (accessed on 11 February 2023).
- He, B.; Wu, J.P.; Xu, J.; Day, R.E.; Kirk, T.B. Microstructural and Compositional Features of the Fibrous and Hyaline Cartilage on the Medial Tibial Plateau Imply a Unique Role for the Hopping Locomotion of Kangaroo. PLoS ONE 2013, 8, e74303. [Google Scholar] [CrossRef]
- Negrello, F.; Garabini, M.; Catalano, M.G.; Kryczka, P.; Choi, W.; Caldwell, D.; Bicchi, A.; Tsagarakis, N. WALK-MAN Humanoid Lower Body Design Optimization for Enhanced Physical Performance. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1817–1824. [Google Scholar] [CrossRef]
- Reher, J.; Ma, W.-L.; Ames, A.D. Dynamic Walking with Compliance on a Cassie Bipedal Robot. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 2589–2595. [Google Scholar] [CrossRef]
- Bledt, G.; Powell, M.J.; Katz, B.; Di Carlo, J.; Wensing, P.M.; Kim, S. MIT Cheetah 3: Design and Control of a Robust, Dynamic Quadruped Robot. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 2245–2252. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value | Variable | Value |
|---|---|---|---|
| l1 (mm) | 244.00 | xA (mm) | 40.54 |
| l2 (mm) | 145.90 | yA (mm) | −70.08 |
| l3 (mm) | 87.20 | Β1,0 (rad) | 2.0952 |
| l4 (mm) | 149.50 | β2,0 (rad) | 0.4396 |
| l5 (mm) | 120.20 | β5 (rad) | −2.8709 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Ge, W.; Zhang, Y.; Liu, B.; Liu, B.; Jin, S.; Li, Y. Optimization Design and Performance Analysis of a Bionic Knee Joint Based on the Geared Five-Bar Mechanism. Bioengineering 2023, 10, 582. https://doi.org/10.3390/bioengineering10050582
Wang Z, Ge W, Zhang Y, Liu B, Liu B, Jin S, Li Y. Optimization Design and Performance Analysis of a Bionic Knee Joint Based on the Geared Five-Bar Mechanism. Bioengineering. 2023; 10(5):582. https://doi.org/10.3390/bioengineering10050582
Chicago/Turabian StyleWang, Zhuo, Wenjie Ge, Yonghong Zhang, Bo Liu, Bin Liu, Shikai Jin, and Yuzhu Li. 2023. "Optimization Design and Performance Analysis of a Bionic Knee Joint Based on the Geared Five-Bar Mechanism" Bioengineering 10, no. 5: 582. https://doi.org/10.3390/bioengineering10050582
APA StyleWang, Z., Ge, W., Zhang, Y., Liu, B., Liu, B., Jin, S., & Li, Y. (2023). Optimization Design and Performance Analysis of a Bionic Knee Joint Based on the Geared Five-Bar Mechanism. Bioengineering, 10(5), 582. https://doi.org/10.3390/bioengineering10050582