1. Introduction
In many treatments for medical and psychosomatic disorders, such as physical therapy and other relaxation techniques, there is often a lack of consistent feedback on how well a patient responds to the therapy. This lack of feedback often leads to high drop-out rates and irregular training, which hinders the therapy’s ability to constantly yield an improved physical or psychological state. Moreover, therapies for which a patient’s psycho-physiological state is of particular importance require a human-centered design approach to effectively address subjective pain and emotions experienced by patients. For example, physiotherapy using vaginal dilators to treat genital pain and penetration disorders or re-validation treatment after genital surgery are invasive and may cause high levels of discomfort [
1]. There is hence, an evident need for emotional feedback.
The concept of affective engineering extends beyond the scope of the vaginal dilation therapy example above and encompasses various domains where understanding and incorporating human emotions are crucial. For example, Balters and Steinert [
2] highlight the need for novel methods that account for the influence of human emotions, which often lead to irrational behavior. They propose that physiological signals and machine learning (ML) techniques could be fundamental in advancing research in this field, as these signals cannot be intentionally influenced by the subject. The underlying assumption is that our body functions are regulated by the autonomic nervous system, which is in turn influenced by emotions [
3]. Thus, by measuring physiological signals, emotional states can be inferred. Consequently, the emergence of user-friendly devices capable of non-invasive measurements presents an excellent opportunity to incorporate biofeedback and emotion reactivity into human-machine interactions and to personalize medical therapies. However, the integration of using such information as a form of feedback or to impact the control of a smart device is currently lacking. Further, there is a clear incentive to integrate the collection and classification of physiological signals in home-based physical therapy sessions. Consequently, it is of high importance to use minimally invasive and user-friendly data collection methods.
1.1. State of the Art
Emotion recognition using physiological signals is an extensively researched area. Using various approaches, both binary [
4,
5,
6,
7,
8,
9,
10] and multi-class classification [
11,
12,
13] have achieved high accuracy rates exceeding 80%. Nevertheless, cross-study results comparison poses a challenge due to varying factors such as the number of subjects, subject-dependent results, the chosen machine learning and validation methods, the signals used, emotion elicitation techniques, and emotion models. For a comprehensive review covering these aspects, please see [
14,
15]. For this study, it is particularly important to us that the data collection method is applicable outside of a laboratory setting. The sensors and the methods for emotion elicitation play a vital role in the technological readiness level of the system. Hence, we review these categories with a focus on their applicability to a minimally invasive scenario.
1.1.1. Signals
The autonomic nervous system (ANS) regulates “somatic homeostasis and regulates visceral activity, such as the heart rate, digestion, respiratory rate, salivation, perspiration, pupil diameter, micturition, and sexual arousal” [
2]. Hence, it is often assumed that measuring these physiological reactions can offer insights into emotional states, and there have even been attempts to establish fixed relationships between certain signals or features and emotional changes [
15]. It is important to note, however, that not all of the mediated reactions indicate emotional changes [
3], and we must acknowledge that any such correlations are likely to be highly nonlinear.
Due to the complex relationship between emotions and body responses, most studies utilize multiple physiological signals. As per a review conducted by Bota et al. [
14], the most frequently used sensor systems and signals (listed from the most to the least often used) include electrodermal activity (EDA), electrocardiography (ECG), respiration rate (RESP), electroencephalography (EEG), electromygraphy (EMG), skin temperature (SKT), acceleration (ACC), blood volume pulse (BVP), and electrooculography (EOG). However, it is crucial to note that many of these signals are only viable in a laboratory setting, e.g., due to electrode placement challenges and the need for specialized equipment which often reduces the mobility of the participants. In settings that are closer to a real-life scenario, the emphasis shifts from, e.g., EEG features to cardiovascular and EDA features.
With this objective in mind, photoplethysmography (PPG) sensors, measuring BVP, provide essential heart rate data. These non-invasive sensors, found in smartwatches and medical wearables, aren’t widely used in emotion recognition due to their sensitivity to movement. Nonetheless, PPG sensors have been implemented in several studies [
4,
12], and sometimes in conjunction with other non-invasive sensors for EDA [
11,
16]. One of the most widely used open databases incorporating PPG measurements is the database for emotion analysis using physiological signals (DEAP) [
17], as shown in studies such as [
5,
9,
10,
18]. Yet, data transferability to other studies using a BVP signal remains challenging due to DEAP’s use of a fingertip PPG sensor and the inclusion of other measures like ECG or EEG for classification.
There are instances where researchers conducted short-term emotion recognition with a minimally invasive setup, for example, [
5] used only a 10
BVP signal and achieved accuracy rates exceeding 80% for binary classification. Moreover, ppg sensors embedded in wearables have been applied in real-life situations by [
7,
18,
19]. Both [
7,
18] utilized a measurement wristband developed by Empatica. While these devices offer the advantage of portability and easy setup, participants often need to remain still to get a clean PPG signal [
20] and researchers are required to deal with noisy signals, e.g., by disregarding corrupted parts [
7].
1.1.2. Emotion Models and Elicitation
Emotions are typically defined by two types of models: discrete emotion spaces and continuous dimensions [
14]. Discrete models assume emotions can be grouped into categories like “sad” or “happy”, but this can lead to individual interpretation differences due to factors such as cultural backgrounds [
14]. Continuous models, on the other hand, measure emotions along one or more axes, which simplifies emotion comparison [
14]. According to Bota et al. [
14], the most popular model that uses continuous dimensions is the valence-arousal model by Russell [
21], where valence represents the positivity or negativity of an emotion, and arousal indicates its intensity.
The majority of emotion elicitation methods occur in a laboratory setting, utilizing various stimuli such as pictures, films, sounds, words, or recall schemes [
14,
22]. Just as with the emotion models, the environment of the participants, including factors like language and cultural background, will considerably impact the emotion elicitation process inherent to the stimuli of some of these methods. Though recall schemes, such as the autobigraphical emotion memory task (AEMT), offer an established way for emotion elicitation without relying on external stimuli [
23], they are notably underrepresented in emotion recognition studies. As highlighted by Bota et al. [
14], a mere two out of over seventy reviewed studies employed any form of recall scheme. For instance, Picard et al. [
13] effectively employed a recall scheme over two decades ago, achieving correct rates of 81% across eight emotion classes for a single subject. Yet, these results have been infrequently reproduced. Chanel et al. [
24] worked with a group of 10 participants and achieved a correct recognition rate of up to 50% for four emotions using a subject-dependent model.
1.1.3. Methods for Classification and Validation
In emotion recognition using physiological signals, methods generally fall into two categories: traditional machine learning and deep learning [
14]. Traditional machine learning involves signal preprocessing, feature engineering, feature fusion, feature-dependent classification, and validation. The aim of signal preprocessing is to reduce noise while retaining relevant information. Feature engineering, the subsequent step, is intended to maximize the informative content of the preprocessed signals [
14]. After feature computation, dimensionality reduction methods are typically applied to avoid the curse of dimensionality. Selecting appropriate features and dimensionality reduction techniques is critical, and the classifier’s success heavily depends on these choices. Features are usually fused into a single vector, which is then used to train and validate the classifier. Most commonly, support vector machine (SVM) algorithms are employed as a supervised learning (SL) method [
14], as demonstrated in [
6,
7,
8,
10,
11,
12,
24].
In contrast to feature-dependent classifiers, deep learning (DL) methods can perform pattern recognition directly on preprocessed signals without feature engineering [
18]. For instance, convolutional neural networks (CNNs) can be used to learn feature-like representations [
5,
25]. Additional representation learning algorithms like autoencoders, utilized in [
16], serve as a method for dimensionality reduction, where the autoencoder’s output feeds into the CNN. While such techniques can greatly reduce the time-consuming steps of preprocessing and feature engineering, DL methods have the limitation of behaving like a black box and require large data sets for training [
14], which are often unavailable in medical experiments.
1.1.4. Validation, Segmentation, and Subject-Dependency
After the classifier is trained and hyperparameters are learned, the model is typically validated on a test data set to measure performance on unseen data [
14]. Common cross validation (CV) methods include
k-fold, leave-one-subject-out (LOSO), and leave-one-out (LOO) CV. In the development of patient models, since we are using multiple experiments from the same subject, the CV method is of particular importance. Notably, both
k-fold and LOO CV methods include subject data in the validation set. Thus, it is important to note that to be able to claim subject-independent results, LOSO CV should be used, where the classifier is tested on data exclusively from one subject, with none of this subject’s data used in training [
14]. The subject-dependency in the context of
k-fold cross-validation becomes increasingly pronounced when multiple trials are conducted per emotion or class, and even more so when several samples are derived from a single trial. In this context, the use of LOSO CV for subject-independent results is absolutely crucial.
Table 1 provides an overview of some studies, including their segmentation approaches, validation methods, trained models, and achieved accuracy rates. As mentioned previously, conducting a fair cross-study comparison is a complex issue. Nevertheless, we anticipate that this table can give a qualitative perspective on the significance of segmentation and validation methodologies. The segment number indicates the total count of segments/data points utilized for training and testing and can be inferred from other numbers. For instance, the number of subjects and labels used for emotion elicitation (which could refer to various emotions or high/low arousal levels) can be an indicator. Furthermore, some researchers conducted multiple trials per label, such as presenting several movie clips to elicit an emotion. In some cases, researchers split a single continuous segment from one trial into multiple segments for data analysis. However, the number of studies listed in the table is limited as not all researchers detail their segmentation methods. It becomes apparent that, despite the overall aim to achieve subject-independent results for greater generalizability, only a few studies utilize LOSO.
1.2. Proposed Approach and Novelty
As discussed above, numerous emotion recognition approaches have been tested, but only a few of them employ measuring devices that can be easily applied outside laboratory settings. Furthermore, to the best of our knowledge, there is a scarcity of experimental evidence that is collected through setups that accurately replicate real-life scenarios and that stimulate the persons by evoking self-triggered emotions. One of our contributions is thus addressing this lack by proposing a novel methodology for the design of experiments that combines emotional recalls with non-invasive wrist measurement devices. This approach is designed so to closely approximate real-life scenarios while ensuring minimal intrusion for medical therapies.
Another contribution is examining which potential factors may be the root of the lack of emotion recognition systems with high technology readiness levels, and applicable to non-laboratory settings. Most interestingly, we have seen that while most researchers work with data sets from multiple subjects, only a few researchers use LOSO CV. Moreover, we see that there is a lack of studies that clearly present the differences (e.g., by presenting the results of a leave-one-subject-out validation along with the results of k-fold) between subject-independent and subject-dependent evaluation and critically discuss their results. Our analyses show though that LOSO CV is needed to obtain subject-independent results. Hence, our analyses eventually check the limitations of existing approaches in emotion recognition by examining the impact of subject dependency by testing multiple data sets using different methods for segmentation and validation.
1.3. Structure of the Manuscript
We continue the manuscript by outlining the minimally invasive data collection process we adopted, followed by the signal preprocessing and feature selection methods. We then briefly discuss the classification and validation methods. In
Section 3, we provide a comprehensive comparison of different data sets, feature sets, and validation methods. We compare and discuss our results compared to the standing literature, with a particular emphasis on segmentation and validation methods. Finally, we provide an outlook for emotion recognition experiments and the methods adopted in this area of research, with a specific focus on the efficacy of methods for producing subject-independent results.
2. Materials and Methods
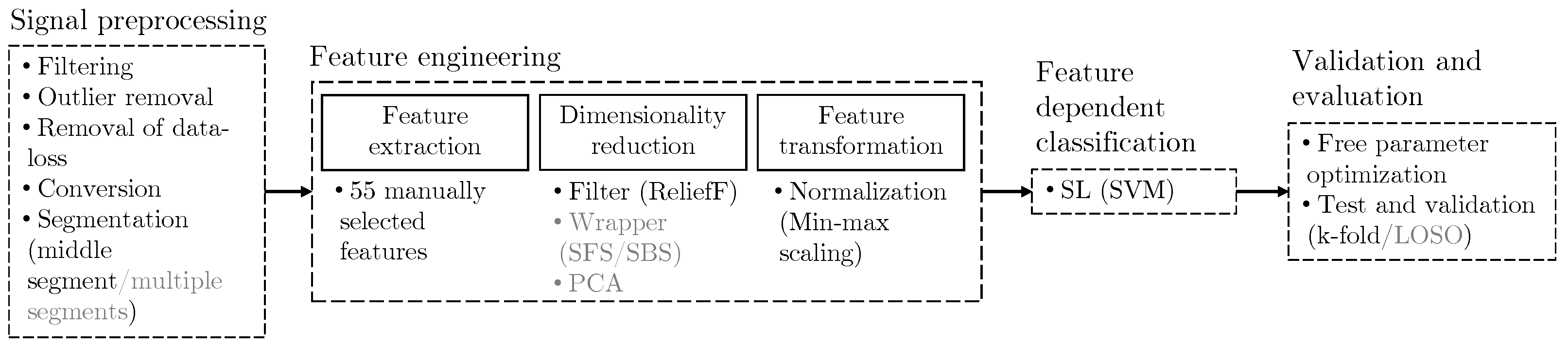
Given our emphasis on improving experimental design and investigating subject-dependency in emotion recognition, our strategy is to use machine learning methods already proven effective in prior studies. Recognizing that recall methods are time-consuming during experiments, which consequently restricts the collection of a large data set, our study employs traditional machine learning methods, i.e., SVM. This algorithm has been frequently and successfully employed in past research. The overall structure of the methods used in this study is depicted in
Figure 1. The steps for our approach to get a subject-independent method, which we favor due to the generalizability of the approach, are represented in black. Importantly, we choose to create a data set that only extracts a single segment per trial. The effect of this is that, since we only ran one trial per emotion, it is possible to use
k-fold validation for the purpose of checking the stability of subject-independent models. In other words, the adopted strategy enables the formation of training sets for which there are no multiple segments with the same emotion from the same participant.
Besides validating our methodology, we recall that one of our goals is to investigate why there seems to be a lack of high technology readiness levels of emotion detectors in commerce. To perform this investigation we used the alternative strategies illustrated in grey in
Figure 1. Most importantly, we wanted to examine the significance of subject dependency in the final classification results. For the subject-dependent approach, we extracted multiple segments per trial and tested these data sets using
k-fold, and LOSO for comparison. We also experimented with different techniques for dimensionality reduction, since this key aspect of our machine learning process could have a significant impact on the performance of the classifier.
2.1. Experimental Protocol
In our pursuit of a minimally invasive setup, we employed the Empatica E4 [
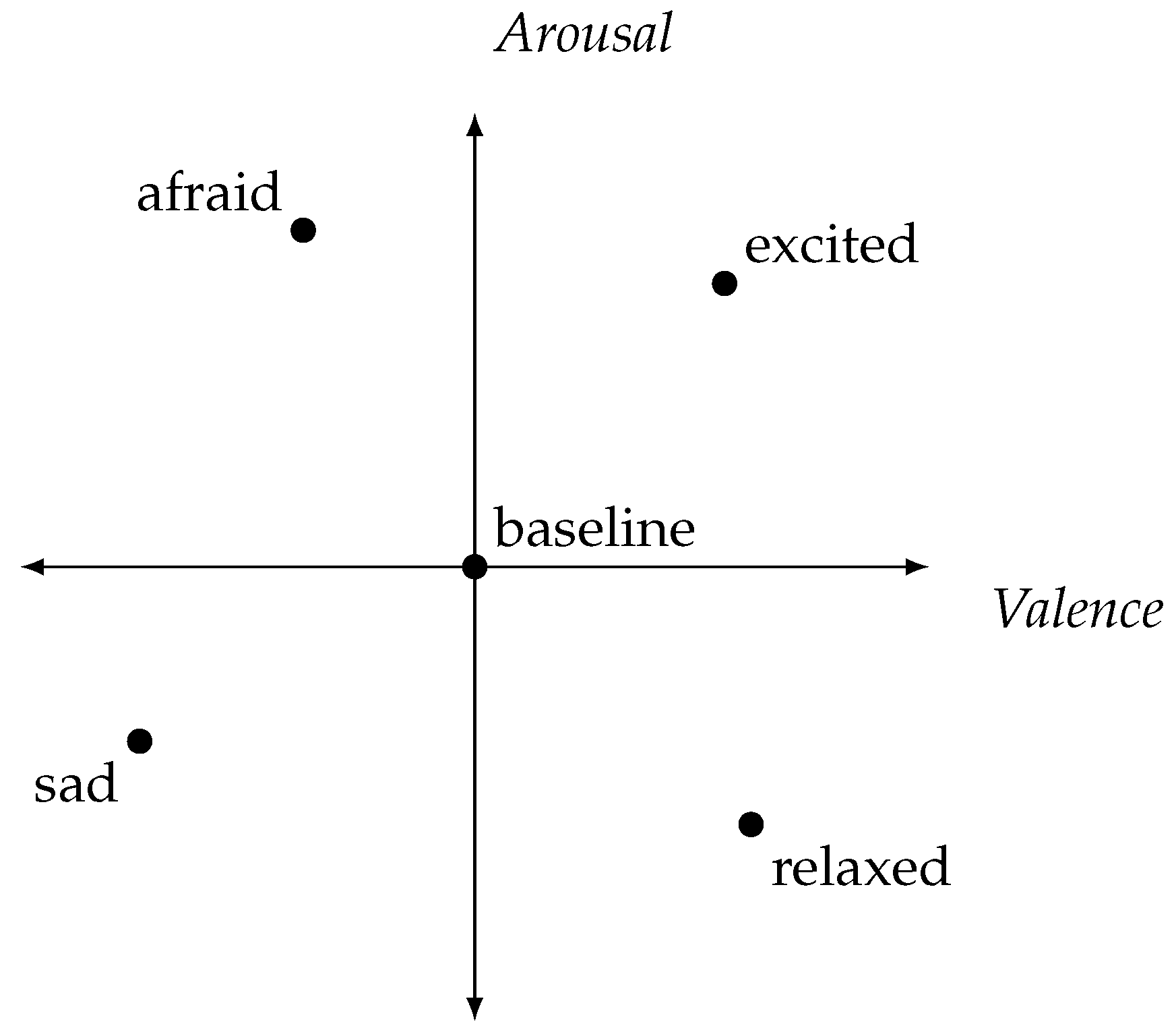
28], a device that captures non-invasive metrics including BVP, EDA, SKT, and ACC. Our emotion elicitation technique was inspired by the AEMT, wherein participants recall and write about personal experiences to generate specific emotions. For our experiment, we sought to elicit four distinct emotions: sadness, excitement, fear, and relaxation, along with a baseline measurement. As shown in
Figure 2, the chosen emotions are distant and lie in different quadrants of the valance-arousal plane. The emotion theory developed by Russell [
21] suggests that similar emotions will still fall within the same quadrant, allowing for good separability even in instances where participants may experience a mix of emotions.
The experimental protocol, as illustrated in
Figure 3, starts with the participant writing about neutral topics, such as their morning routine or personal facts, to establish a baseline that corresponds to a neutral state on the valence-arousal plane. The participant then completes a randomized distraction task (chosen from options such as Sudoku, a labyrinth, finding all ‘A’s in a text, or copying geometric shapes from one sheet to another), followed by their first randomized emotion task. This sequence was repeated until all four emotions were elicited. After each distraction and emotion task, participants rated their level of valence and arousal using the picture-based self-assessment manikin (SAM) [
29]. Due to the sensitivity of the PPG sensor to wrist movement, participants were instructed to keep their wrists still during the experiment. Following this protocol, we collected data from 45 participants (7 female, 19 male, 19 not answered, ranging in age from 12 to 77, with an average age of 29.7 years).
2.2. Preprocessing
Figure 4 illustrates the various preprocessing methods we applied to the different signals. Due to the structure of the experiment, see
Figure 3, the participants needed to interact with a computer to answer the SAM assessment and change between distraction and emotional tasks. To eliminate the potential outliers in the data caused by the unavoidable movement, we removed the non-relevant start and end sequences from each signal before the preprocessing stage.
For the BVP signal, we used a 4th-order Butterworth bandpass filter with cutoff frequencies of 1
and 8
to minimize both high-frequency measurement noise and low-frequency movement noise, following the method used by Domínguez-Jiménez et al. [
11]. Then, we eliminated outliers by leveraging the ACC information. Movement-related points were classified by computing the jerk and identifying any absolute values above 2 m s
−3. All BVP signal values within a 200-point window after any derivative of the ACC exceeded this jerk threshold were tagged as corrupted. This 200-point window corresponds to roughly 3
given a sample rate of 64
. Another outlier removal step addressed outliers not due to wrist movements by calculating the standard deviation and marking data points outside of a threshold of three times the standard deviation. The inter-beat interval (IBI) and heart rate (HR) were computed from the BVP signal using Empatica’s proprietary algorithm, with interpolated IBI signal values being removed.
The EDA signal was processed using a 2nd-order Butterworth lowpass filter with a cutoff frequency of 1
. We then extracted the skin conductance response (SCR) signal from the preprocessed EDA signal using the continious decomposition analysis (CDA) as described by Benedek and Kaernbach [
30]. After the CDA, it is important to apply a threshold for the minimum amplitude of the detected peaks to avoid misinterpreting noise as SCRs [
30]. While most commonly, a threshold of
μS is applied [
30], we observed that numerous participants didn’t present many SCRs above
μS. As a result, we lowered the threshold to
μS, which remains within acceptable limits according to the Empatica recommendations [
31]. The SKT signal was processed using a 2nd-order Butterworth lowpass filter with a cutoff frequency of 1
. The resolution of the SKT signal and the accuracy of the sensor are
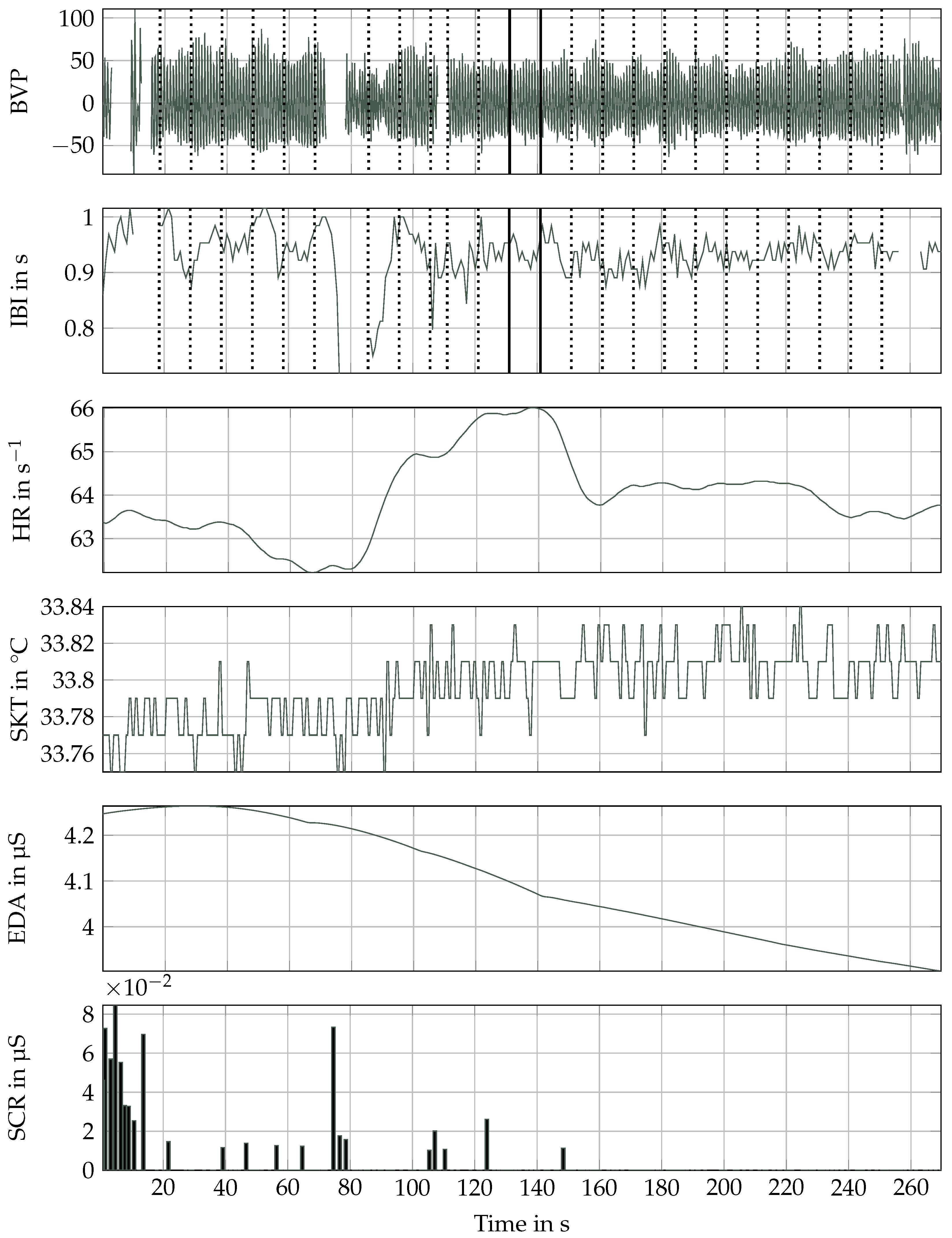
°C. Consequently, in
Figure 5, the observable variations are limited to a subtle shift in the baseline temperature.
After individual signal processing, all signals were segmented. Given our goal of using feedback as input for a controller, immediate feedback is ideal. As such, we opted for shorter segments and selected a segment length of 20 for the subject-independent approach, but also tested segment lengths between 10 and 40 . We utilized the freedom granted by the 300 duration of each emotion segment to avoid the use of noisy data. Firstly, we removed the initial 30 from each segment to allow for the time it might take subjects to immerse themselves in the situation and truly feel the corresponding emotion. Secondly, we identified all uncorrupted segments that meet the required length, noting that only the BVP and IBI signals were filtered for outliers. We then selected the segment closest to the midpoint of the remaining 270 worth of signal.
The relatively lengthy duration of the emotion elicitation also offers the opportunity to extract multiple segments from each emotion segment, providing more training data for the classifier, as has been done in several studies. However, this approach requires caution as these segments won’t be interspersed with distraction tasks intended to reset the emotional baseline. To somewhat counteract this, we decided to consider only segments that are at least 10
apart.
Figure 5 displays all preprocessed signals, illustrating both taking a segment from the middle (indicated by a solid line) or multiple segments (represented by dashed lines) from the uncorrupted parts of the signal.
2.3. Feature Engineering
In this study, we decided to extract a broad set of features manually selected from related studies that worked with similar signals [
5,
7,
11,
12,
18,
27]. An overview of these features can be seen in
Table A1. Only those features that appeared meaningful were selected. For instance, some features extracted from the SKT were suspected to be influenced by a baseline drift, and no frequency-domain features were extracted from the IBI signal, given they don’t provide meaningful information when computed for a short segment. Some features for the BVP signal were computed using Welch’s power spectral density (PSD), which is a noise-reducing method for spectral density estimation, implemented in Matlab [
32].
As a filter method for features, we implemented the ReliefF algorithm in Matlab with ten nearest neighbors in the subject-independent approach. The ten features with the highest predictor importance weights were subsequently selected. We preferred to use a filter algorithm like ReliefF, which selects features, over projecting the data into a low-dimensional space, as the latter approach might fail to select meaningful features due to a possible non-linearity, or otherwise. Therefore, we used a principle component analysis (PCA) algorithm with a polynomial kernel as a reference using a toolbox [
33]. We also utilized sequential forward selection (SFS) and sequential backward selection (SBS), implemented in Matlab. The algorithm iteratively selects a subset of features from the feature matrix by assessing a custom criterion. Typically, the loss of the classifier to be later trained on the reduced feature set is used, making wrapper methods classifier-dependent. To stabilize the results, we took the average of three cross-validations as the criterion.
Given that we used a distance-based classifier, scaling our features is advisable. To compensate for individual differences, we min-max-scaled each individual’s features, considering the maximum and minimum values of the extracted features across all emotions.
2.4. Classification and Validation
For classification and hyperparameter optimization, we implemented an SVM algorithm in Matlab. While using 10-fold validation is a very common approach, even when working with multi-subject data, for the purpose of generalizability one should perform LOSO validation to make sure that the model is not trained on data from the same subject as the test is performed on. Since we only extracted one segment per emotion per subject in the subject-dependent approach, we decided that k-fold validation was sufficient. However, for the multi-segment approach, we also tested our model using LOSO validation, where we manually split the data set into folds where segments from one participant were set as the test set and the rest of the segments were used as the training data set.
3. Results
In this section, we present the results from the preprocessing, feature engineering, and classification with different validation methods. We additionally split our results into the accuracy of the four emotions within the valance-arousal plane as well as the accuracy of the valance and arousal dimensions separately.
3.1. Preprocessing Results
This section presents the outcomes of our signal processing, focusing on two crucial aspects. Firstly, we chose not to interpolate the BVP and IBI data due to the potential presence of long sequences of missing data points, rendering interpolated data unreliable, which impacts the number of segments available for classification. Secondly, we encountered difficulties in detecting SCRs in the EDA data.
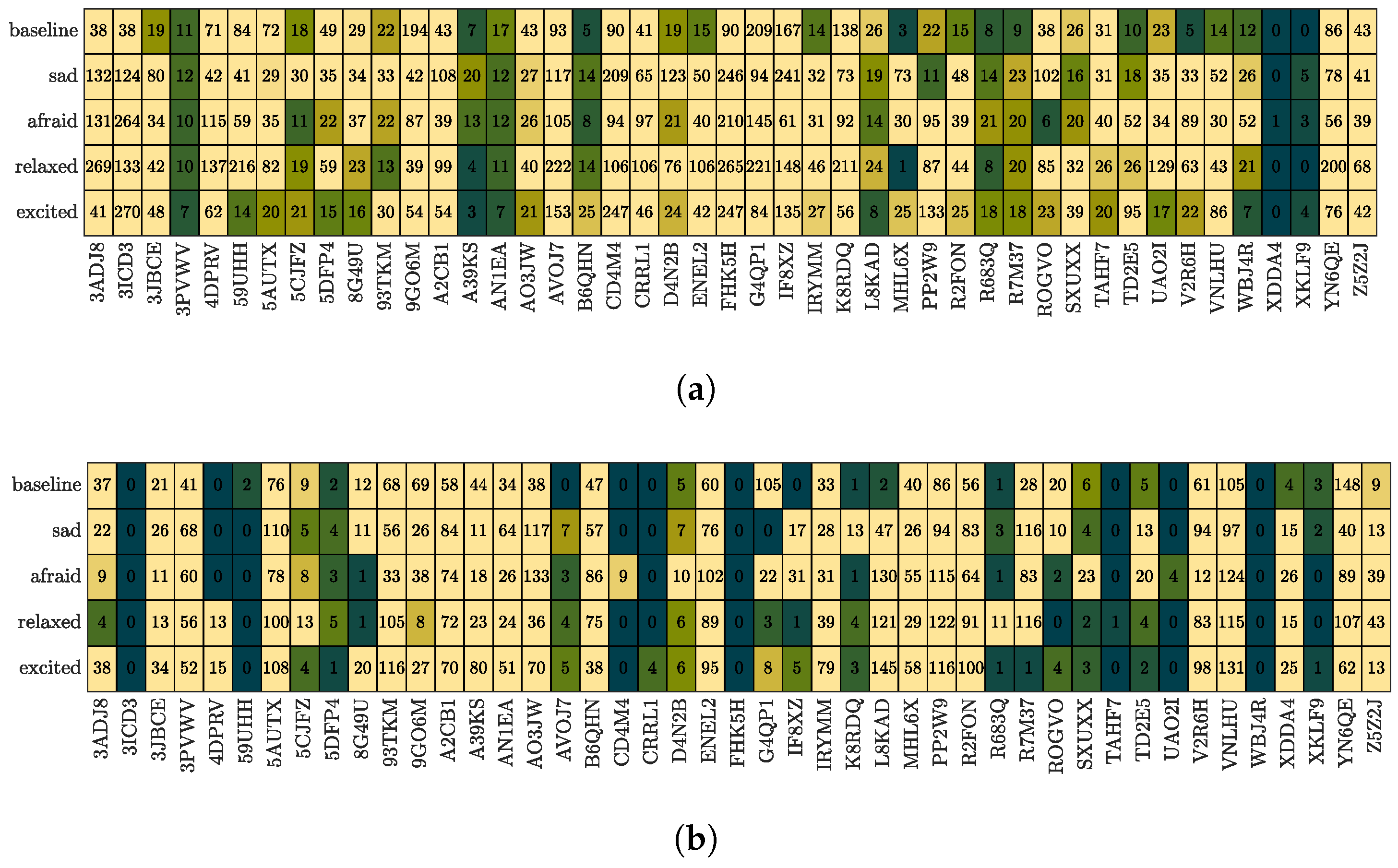
Figure 6 provides an overview of the corruption of the BVP. In
Figure 6a, we visualize the longest uncorrupted segment for each emotion task and each participant. The color scale’s upper limit was set to 30
. The data corruption appears to be subject-dependent, with some participants’ data almost entirely corrupted (e.g., XDDA4), while others are almost completely uncorrupted.
Figure 6b presents the number of detected SCRs during each emotion task with an amplitude above
μS. The color scale’s upper limit was set to ten, revealing some participant data sets with very few SCRs (e.g., 3ICD3). This is in spite of our choice to use an unconservatively low threshold for detecting peaks, suggesting that we may risk identifying insignificant SCRs. Again, corruption does not seem to occur randomly and some sub-data sets appear more affected than others.
Given our approach of excluding data without an uncorrupted BVP segment of the required length, the size of the data set depends on the segment length. For a segment length of 20 s, which was used for subject-dependent testing, the data set consists of:
134 uncorrupted segments (out of 180 segments),
Data from 40 participants (out of 45),
Label distribution for emotions: Afraid: 35, Excited: 31, Relaxed: 34, Sad: 34,
Label distribution for arousal according to the SAM: High: 73, Low: 61,
Label distribution for valence according to the SAM: High: 75, Low: 59.
Even though the segment length was chosen relatively low in comparison to the length of one emotion task (270 s), the number of segments for testing was reduced significantly.
3.2. Feature Engineering and Classification Results
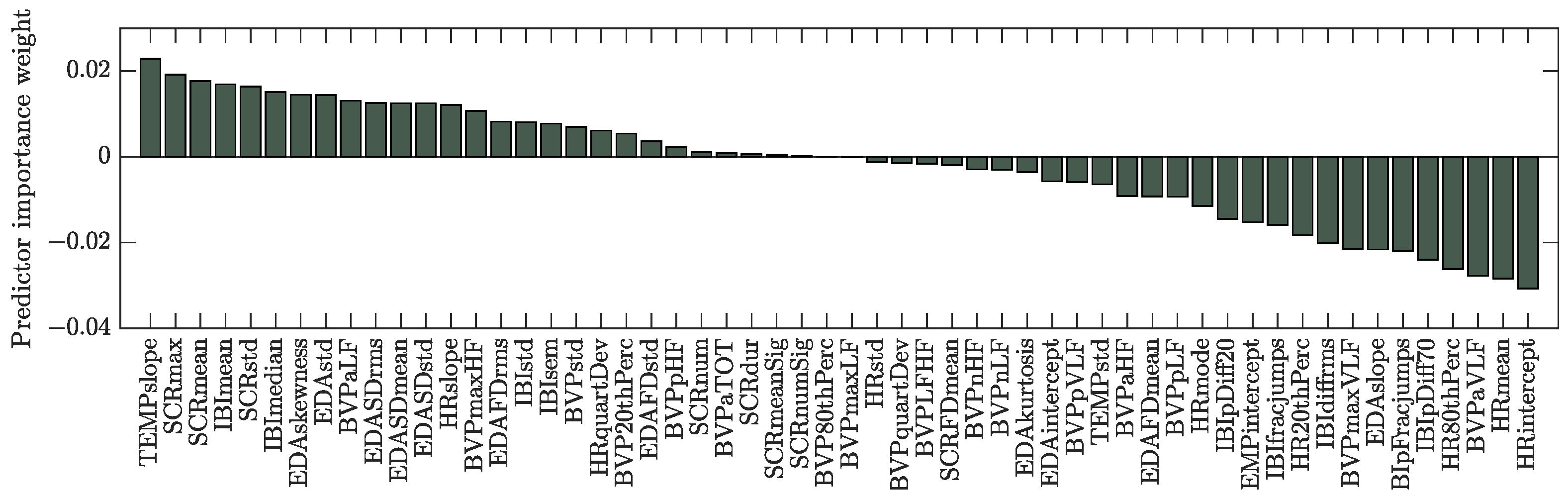
The predictor importance weights computed for the emotion label with the ReliefF algorithm can be found in
Figure 7. Only the ten features with the highest weights were selected in the subject-independent approach. It is clear that selected features were extracted from all of the available sensors.
Figure 8 shows the confusion matrices for all predictions from the 10-fold CV. While the classification for emotion performs better than random for all classes, the emotion “afraid” seems especially difficult to distinguish.
The results of the classifications for different data sets, feature sets, and validation methods are then displayed in
Table 2. The accuracy of the trained model, defined as the average proportion of correctly classified instances averaged accross all test folds, is presented for classifications for the emotion labels, as well for binary classification (low/high) along the valence and arousal scales, according to the results of the self-assessments. Ten features were selected with the ReliefF algorithm from a segment of length 20
as discussed above unless otherwise specified.
The first subdivision of the table shows classification results for segment lengths ranging from 10 to 40 . None of the trained models achieved accuracy significantly better than average guessing.
The second subdivision presents the outcomes for different feature selection methods: Feature selection with the ReliefF algorithm with five and fifteen features, and SFS and SBS. None of these methods significantly improved the results. Furthermore, it is essential to highlight that the use of SFS and SBS resulted in the selection or deselection of only a limited number of features, raising concerns about the robustness and meaningfulness of these feature sets. Given the marginal improvement in correct rates, it appears that the issue may not lie with the selected features.
The last subdivision contains the results of the multi-segment approach with segment lengths of 20 and 10 . The first data set (multi20) contains all segments with a minimum length of 20 . The second data set (multi20 (5–10)) is similar, but the minimum and maximum numbers of extracted segments per emotion and participant were limited to a range of five to ten to minimize a bias toward participants with more uncorrupted segments. To maximize the number of segments, a third data set (multi10 (10–20)) was computed with a segment length of 10 and a range of ten to twenty segments. Each of these data sets was tested using both 10-fold and LOSO classification.
The classifier’s accuracy did improve significantly, but only for the data sets with a limited range of segments. The best results were achieved for the multi10 (10–20) data set, with an accuracy of 75%. However, this was only the case if the model was validated using 10-fold validation, as the accuracy dropped to almost the same as random guessing with LOSO validation.
We see that the accuracy of our model improved notably when we extracted multiple segments from each emotion task. This improvement, however, was primarily observed when we constrained the range of segments for each emotion per participant and used k-fold validation. These findings suggest that the success of classification in emotion recognition might significantly depend on the similarity of the data between training and testing sets (e.g., segments with identical emotions and participants). This could potentially explain why the classifier performs better when there is a minimum number of segments to be extracted from each emotion task. In this way, the data set does not include segments from participants for which only a small amount of data is available.
4. Discussion
We can note how the subject-independent approach leads to an accuracy of our SVM classifier on segment lengths of 20 that is just above random guessing both when considering four emotions (36%) and when considering only two of them (58% for one case and 62% for the other). Raising the rate of correct classifications requires taking a subject-dependent approach, i.e., using multiple segments from each emotion task per participant. In this case, using 10-fold cross validation, the correct rates increase to up to 75% for four emotions. This result can be then used for interpreting prior research, and highlight the issues that subject-dependency has in the previously published results in emotion recognition. The remainder of this section does thus such interpretation.
4.1. On Experimental Design
After preprocessing, a significant portion of the BVP and EDA data was found to be corrupted, reducing the usable data from 180 to 134 segments. While the problem of missing and noisy data due to movement has been reported in previous studies [
7,
20], the percentage is still surprisingly high considering that participants were asked to remain still. The lost data not only increased the time spent on the project but also potentially impacted our results. Despite SCR measures potentially providing valuable emotion indicators, only 126 segments had more than 10 SCRs, which could lower correct rates even if these measures were perfectly predictive. The overall amount of data corruption might be especially challenging for real-time applications. Another challenge is that writing about emotions is time-consuming, limiting the size of a single-session data set when using the AEMT.
4.2. Comparison to Previous Studies
Particularly with the machine learning methods, we purposely remained closely aligned with the literature, for instance, [
6,
7,
8,
10,
11,
12,
24]. The accuracies achieved in these papers are claimed to be of 80% and above, see
Table 1. However, it is challenging to make direct comparisons to other studies due to differences in signals used, emotion elicitation methods, and subject dependency across studies.
We identified two studies that used Empatica devices similar to ours. Gjoreski et al. [
7] achieved around 73% accuracy for three stress levels and 90% for two stress levels. The study conducted by Li et al. [
18] effectively identified periods of intense stress; however, since they used a regression model instead of a classification model, it is difficult to directly compare their results to our study. These studies demonstrate Empatica’s potential for stress measurement, but it’s unclear if these methodologies are transferable to emotion detection.
Chanel et al. [
24] used a recall scheme similar to ours and achieved 50% accuracy for four classes and 70% for binary classifications compared to our best results of 75% and 85%, respectively. Their approach differed, as they used EEG data, trained a subject-dependent model, and collected more data due to shorter emotion tasks. The study by Picard et al. [
13] also used a recall setup and achieved 81% accuracy with a k-nearest neighbours (kNN) classifier, but it only involved a single subject.
While these studies demonstrate the potential utility of the different components within our experimental design for emotion recognition using physiological signals, to the best of our knowledge, there has been no successful demonstration of subject-independent emotion recognition using a recall scheme. We take this a step further by asserting that many studies based on multi-subject datasets may create a misleading impression of favorable subject-independent results, while our findings emphasize the significant impact of subject-dependency on these outcomes. We will discuss this in detail below.
4.3. On Subject-Dependency
While the results for the multi-segment approach are encouraging, it is important to raise concerns regarding the fact that these segments originate from a single emotion task. Our observations, however, serve as evidence that emotion recognition is highly subject-dependent. Our assertion that subject dependency plays a critical role in emotion recognition gains further support upon examining
Table 1. While nearly all researchers employ
k-fold validation, the majority conduct multiple trials per emotion. As a result, the training data set contains information similar to that in the test data set. Notably, some studies even extract multiple segments from one emotion task [
5,
9]. Our analyses suggest that this practice disregards the importance of LOSO in obtaining subject-independent, and, hence, generalizable results.
By examining our data using both a subject-dependent and a subject-independent approach, we believe to have successfully demonstrated the strong subject dependency in emotion recognition. Results from literature with high accuracy and data sets collected from multiple subjects might thus provide too optimistic performances and achievable correct rates. This optimism is likely due to uncertainty regarding whether validation is consistently performed with data from an entirely new subject. Our study, however, clearly shows the need to collect subject-dependent data.
In addition to our best-performing model’s inherent subject-dependent nature; rendering it unsuitable for extrapolation to individuals who are not present in the dataset; there exists an element of uncertainty surrounding its temporal stability and its adaptability to diverse demographic cohorts. This concern is not unique to our model but extends across the field, hence requiring further investigation.
5. Conclusions
Our first main objective was to establish a minimally invasive setup to advance technology readiness levels in emotion recognition, particularly to provide emotional feedback during medical and non-medical treatments involving emotional and psycho-physiological feedback. The second main objective was to examine the impact of subject dependency by working with different methods for segmentation and validation.
Relatively to the first objective, the experience gained through the collection and processing of our data may be summarized in a set of experimental design recommendations. In primis, due to the sensors’ high sensitivity to noise, we advise against using the Empatica E4 device in environments with significant movement or where rapid emotion classification is essential, such as in control-oriented scenarios. For instance, from a total of 180 segments with a length of 270 s, we were only able to extract 134 uncorrupted segments with a length of 20 s. Moreover, our literature review suggests that issues like segmentation and sample size may have larger importance than what they seem to be typically credited with. We thus collected some advice on which data set sampling approaches one may follow in our discussion section.
Relatively to the second objective, we note that while the SVM we trained with a subject-independent data set barely performed better than random guessing (36% for four emotions). However, we achieved good results when we extracted multiple segments from each emotion task for each participant (75% for four emotions). This strategy obviously compromises generalizability, but is nonetheless useful to collect evidence that strongly suggests that emotion recognition is affected by a highly subject-dependent issue. This finding, in turn, highlights the importance of taking individual differences into account in studies of emotion recognition.
Expanding the dataset by including a more extensive and diverse pool of participants is one avenue for improving subject-independent results; in line with the need for larger datasets when employing deep learning techniques. Furthermore, the incorporation of a broader range of sensors may enhance the approach at the possible expense of reduced experimental flexibility. It is crucial to acknowledge that, despite their success in some instances, these strategies may not ensure favorable outcomes, given that they have predominantly been evaluated within subject-dependent validation frameworks.
Still relative to our second objective, and considering that getting subject-independent results in emotion recognition using physiological signals is still a challenge, we propose to start data collection campaigns by focusing first on a single subject. In scenarios involving individualized, long-term therapies, developing personalized emotion recognition models could be advantageous. From an experimental design point of view, we also emphasize the importance of collecting multiple emotion segments from each participant. We also note that we cannot exclude the possibility that time variance may also play a crucial role; likely models will need to be trained in an online fashion at the beginning of each session.
The most suitable model for a participant might be chosen based on easily collectible metadata, potentially offering a more personalized and accurate approach to emotion recognition.
Author Contributions
Conceptualization, R.R.J., M.D. and S.K.; methodology, E.M. and R.R.J.; software, E.M.; validation, E.M., R.R.J. and D.V.; formal analysis, E.M.; investigation, R.R.J. and R.D.; resources, S.K. and D.V.; data curation, R.R.J., R.D. and E.M.; writing—original draft preparation, R.R.J. and E.M.; writing—review and editing, E.M., R.R.J., R.D., M.D., D.V. and S.K.; visualization, E.M.; supervision, S.K. and D.V.; project administration, R.R.J. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
The experiments were performed at the Technical University of Berlin and the Norwegian University of Science and Technology. The study was approved by the ethics review board for faculty three at the Technical University of Berlin and the Norwegian Centre for Research Data (NSD). All 45 participants were aware that they were able to withdraw from the experiment at any time, without penalty. All participants signed a consent form that highlighted that the experiments were on self-triggered emotions and that people with mental health issues or cognitive impairments should not participate in the study. Data protection laws were followed by anonymizing the data by using a random participant identifier, which can also be used by the participant to withdraw their data at any time in the future.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
Data available on request due to privacy restrictions.
Acknowledgments
We thank Petter Skau-Nilsen for helping with the design of the experimental protocol and data collection.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| ACC | acceleration |
| AEMT | autobigraphical emotion memory task |
| ANS | autonomic nervous system |
| BVP | blood volume pulse |
| CDA | continious decomposition analysis |
| CNN | convolutional neural network |
| CV | cross validation |
| DEAP | database for emotion analysis using physiological signals |
| DL | deep learning |
| ECG | electrocardiography |
| EDA | electrodermal activity |
| EEG | electroencephalography |
| EMDC | emotion-specific multilevel dichotomous classification |
| EMG | electromygraphy |
| EOG | electrooculography |
| HR | heart rate |
| IBI | inter-beat interval |
| kNN | k-nearest neighbours |
| LOO | leave-one-out |
| LOSO | leave-one-subject-out |
| LR | logistic regression |
| ML | machine learning |
| NN | neural network |
| PCA | principle component analysis |
| PPG | photoplethysmography |
| PSD | power spectral density |
| RESP | respiration rate |
| RF | random forests |
| SAM | self-assessment manikin |
| SBS | sequential backward selection |
| SCR | skin conductance response |
| SFS | sequential forward selection |
| SKT | skin temperature |
| SL | supervised learning |
| SVM | support vector machine |
Appendix A
Table A1.
Overview of the 55 features selected for this study.
Table A1.
Overview of the 55 features selected for this study.
| Name | Description | Name | Description |
|---|
| PPGmaxVLF | Highest power in VLF band | HRintercept | Intercept of a linear regression line |
| PPGmaxLF | Highest power in LF band | HR20thPerc | 20th percentile |
| PPGmaxHF | Highest power in HF band | HR80thPerc | 80th percentile |
| PPGaVLF | Raw area of VLF band | HRquartDev | Quartile deviation (75th–25th percentile) |
| PPGaLF | Raw area of LF band | EDAstd | Standard deviation |
| PPGaHF | Raw area HF band | EDAslope | Slope of a linear regression line |
| PPGaTOT | Total raw area of VLF, LF and HF bands | EDAintercept | Intercept of a linear regression line |
| PPGpVLF | Relative VLF area w.r.t. total area | EDAkurtosis | Kurtosis |
| PPGpLF | Relative LF area w.r.t. total area | EDAskewness | Skewness |
| PPGpHF | Relative HF area w.r.t. total area | EDAFDsqrtMean | Root mean square of first derivative GSR signal |
| PPGLFHF | Ratio of LF to HF power | EDAFDmean | Mean value of first derivative GSR signal. |
| PPGstd | Standard deviation | EDAFDstd | standard deviation |
| PPG20thPerc | 20th percentile | EDASDsqrtMean | Root mean square of second derivative |
| PPG80thPerc | 80th percentile | EDASDmean | Mean value of second derivative |
| PPGquartDev | Quartile deviation (75th–25th percentile) | EDASDstd | Standard deviation |
| IBImean | Mean value | SCRnum | Number of SCR |
| IBImedian | Median value | SCRmean | Average amplitude |
| IBIstd | Standard deviation | SCRnumSig | Number of significant responses (
μS) |
| IBIsem | Standard error of the mean value | SCRmeanSig | Avergage amplitude of significant responses (
μS) |
| IBIfracjumps | Number of successive RR differing by greater or equal to 50 ms | SCRdur | Average duration |
| IBIpFracjumps | Percentage of successive RR differing by greater or equal to 50 ms | SCRmax | Maximum amplitude |
| IBIdiffRms | Root mean square of successive RR differences | SCRstd | Standard deviation |
| IBIpDiff20/IBIpDiff50/IBIpDiff70 | Percentage of the differences between adjacent RR samples that are greater than 20 ms/50 ms/70 ms | SCRFdmean | Mean of first derivative |
| HRmean | Mean value of heart rates | TEMPstd | Standard deviation |
| HRstd | Standard deviation heart rates | TEMPslope | Slope of a linear regression line |
| HRmode | Mode | TEMPintercept | Intercept of a linear regression line |
| HRslope | Slope of a linear regression line | | |
References
- Varagnolo, D.; Knorn, S.; Melles, R.; Dewitte, M. Qualitative modeling of pressure vs. pain relations in women suffering from dyspareunia. IFAC-PapersOnLine 2017, 50, 2043–2050. [Google Scholar] [CrossRef]
- Balters, S.; Steinert, M. Capturing emotion reactivity through physiology measurement as a foundation for affective engineering in engineering design science and engineering practices. J. Intell. Manuf. 2017, 28, 1585–1607. [Google Scholar] [CrossRef]
- Levenson, R.W. The Autonomic Nervous System and Emotion. Emot. Rev. 2014, 6, 100–112. [Google Scholar] [CrossRef]
- Kim, D.; Seo, Y.; Cho, J.; Cho, C.H. Detection of subjects with higher self-reporting stress scores using heart rate variability patterns during the day. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–25 August 2008; pp. 682–685. [Google Scholar] [CrossRef]
- Lee, M.; Lee, Y.K.; Lim, M.T.; Kang, T.K. Emotion Recognition Using Convolutional Neural Network with Selected Statistical Photoplethysmogram Features. Appl. Sci. 2020, 10, 3501. [Google Scholar] [CrossRef]
- Zhai, J.; Barreto, A. Stress detection in computer users based on digital signal processing of noninvasive physiological variables. In Proceedings of the 2006 International Conference of the IEEE Engineering in Medicine and Biology Society, New York, NY, USA, 30 August–3 September 2006; pp. 1355–1358. [Google Scholar] [CrossRef]
- Gjoreski, M.; Luštrek, M.; Gams, M.; Gjoreski, H. Monitoring stress with a wrist device using context. J. Biomed. Inform. 2017, 73, 159–170. [Google Scholar] [CrossRef]
- Mozos, O.M.; Sandulescu, V.; Andrews, S.; Ellis, D.; Bellotto, N.; Dobrescu, R.; Ferrandez, J.M. Stress Detection Using Wearable Physiological and Sociometric Sensors. Int. J. Neural Syst. 2017, 27, 1650041. [Google Scholar] [CrossRef]
- Lin, W.; Li, C.; Sun, S. Deep Convolutional Neural Network for Emotion Recognition Using EEG and Peripheral Physiological Signal. In Image and Graphics; Zhao, Y., Kong, X., Taubman, D., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2017; Volume 10667, pp. 385–394. [Google Scholar] [CrossRef]
- Garcia, H.F.; Alvarez, M.A.; Orozco, A.A. Gaussian process dynamical models for multimodal affect recognition. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Orlando, FL, USA, 16–20 August 2016; pp. 850–853. [Google Scholar] [CrossRef]
- Domínguez-Jiménez, J.A.; Campo-Landines, K.C.; Martínez-Santos, J.C.; Delahoz, E.J.; Contreras-Ortiz, S.H. A machine learning model for emotion recognition from physiological signals. Biomed. Signal Process. Control 2020, 55, 101646. [Google Scholar] [CrossRef]
- Rakshit, R.; Reddy, V.R.; Deshpande, P. Emotion detection and recognition using HRV features derived from photoplethysmogram signals. In Proceedings of the 2nd Workshop on Emotion Representations and Modelling for Companion Systems, New York, NY, USA, 16 November 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Picard, R.; Vyzas, E.; Healey, J. Toward Machine Emotional Intelligence: Analysis of Affective Physiological State. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 1175–1191. [Google Scholar] [CrossRef]
- Bota, P.J.; Wang, C.; Fred, A.L.N.; Da Placido Silva, H. A Review, Current Challenges, and Future Possibilities on Emotion Recognition Using Machine Learning and Physiological Signals. IEEE Access 2019, 7, 140990–141020. [Google Scholar] [CrossRef]
- Shu, L.; Xie, J.; Yang, M.; Li, Z.; Li, Z.; Liao, D.; Xu, X.; Yang, X. A Review of Emotion Recognition Using Physiological Signals. Sensors 2018, 18, 2074. [Google Scholar] [CrossRef]
- Martinez, H.P.; Bengio, Y.; Yannakakis, G.N. Learning deep physiological models of affect. IEEE Comput. Intell. Mag. 2013, 8, 20–33. [Google Scholar] [CrossRef]
- Koelstra, S.; Muhl, C.; Soleymani, M.; Lee, J.S.; Yazdani, A.; Ebrahimi, T.; Pun, T.; Nijholt, A.; Patras, I. DEAP: A Database for Emotion Analysis; Using Physiological Signals. IEEE Trans. Affect. Comput. 2012, 3, 18–31. [Google Scholar] [CrossRef]
- Li, M.; Xie, L.; Wang, Z. A Transductive Model-based Stress Recognition Method Using Peripheral Physiological Signals. Sensors 2019, 19, 429. [Google Scholar] [CrossRef] [PubMed]
- Zenonos, A.; Khan, A.; Kalogridis, G.; Vatsikas, S.; Lewis, T.; Sooriyabandara, M. HealthyOffice: Mood recognition at work using smartphones and wearable sensors. In Proceedings of the IEEE International Conference on Pervasive Computing and Communication Workshops (PerCom Workshops), Sydney, NSW, Australia, 14–18 March 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Menghini, L.; Gianfranchi, E.; Cellini, N.; Patron, E.; Tagliabue, M.; Sarlo, M. Stressing the accuracy: Wrist-worn wearable sensor validation over different conditions. Psychophysiology 2019, 56, e13441. [Google Scholar] [CrossRef] [PubMed]
- Russell, J.A. A circumplex model of affect. J. Personal. Soc. Psychol. 1980, 39, 1161–1178. [Google Scholar] [CrossRef]
- Kreibig, S.D. Autonomic nervous system activity in emotion: A review. Biol. Psychol. 2010, 84, 394–421. [Google Scholar] [CrossRef]
- Mills, C.; D’Mello, S. On the validity of the autobiographical emotional memory task for emotion induction. PloS ONE 2014, 9, e95837. [Google Scholar] [CrossRef]
- Chanel, G.; Kierkels, J.J.; Soleymani, M.; Pun, T. Short-term emotion assessment in a recall paradigm. Int. J. Hum. Comput. Stud. 2009, 67, 607–627. [Google Scholar] [CrossRef]
- Santamaria-Granados, L.; Munoz-Organero, M.; Ramirez-Gonzalez, G.; Abdulhay, E.; Arunkumar, N. Using Deep Convolutional Neural Network for Emotion Detection on a Physiological Signals Dataset (AMIGOS). IEEE Access 2019, 7, 57–67. [Google Scholar] [CrossRef]
- Kim, J.; André, E. Emotion recognition based on physiological changes in music listening. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 30, 2067–2083. [Google Scholar] [CrossRef]
- Wen, W.; Liu, G.; Cheng, N.; Wei, J.; Shangguan, P.; Huang, W. Emotion Recognition Based on Multi-Variant Correlation of Physiological Signals. IEEE Trans. Affect. Comput. 2014, 5, 126–140. [Google Scholar] [CrossRef]
- Empatica. Empatica E4. Available online: https://www.empatica.com/en-eu/research/e4/ (accessed on 23 November 2022).
- Bradley, M.M.; Lang, P.J. Measuring emotion: The self-assessment manikin and the semantic differential. J. Behav. Ther. Exp. Psychiatry 1994, 25, 49–59. [Google Scholar] [CrossRef] [PubMed]
- Benedek, M.; Kaernbach, C. A continuous measure of phasic electrodermal activity. J. Neurosci. Methods 2010, 190, 80–91. [Google Scholar] [CrossRef] [PubMed]
- Empatica. EDA Expected Signal. Available online: https://support.empatica.com/hc/en-us/articles/360030048131-E4-data-EDA-Expected-signal (accessed on 21 June 2022).
- The MathWorks. Welch’s Power Spectral Density Estimate. Available online: https://de.mathworks.com/help/signal/ref/pwelch.html (accessed on 26 November 2022).
- van der Maaten, L. Matlab Toolbox for Dimensionality Reduction. Available online: https://lvdmaaten.github.io/drtoolbox/ (accessed on 26 November 2022).
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).



 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}