
Comparing Combined 1D/2D and 2D Hydraulic Simulations Using High-Resolution Topographic Data: Examples from Sri Lanka—Lower Kelani River Basin

 , , ,
, , ,  and
and
Abstract
:1. Introduction
2. Hydraulic Modelling of River Flow
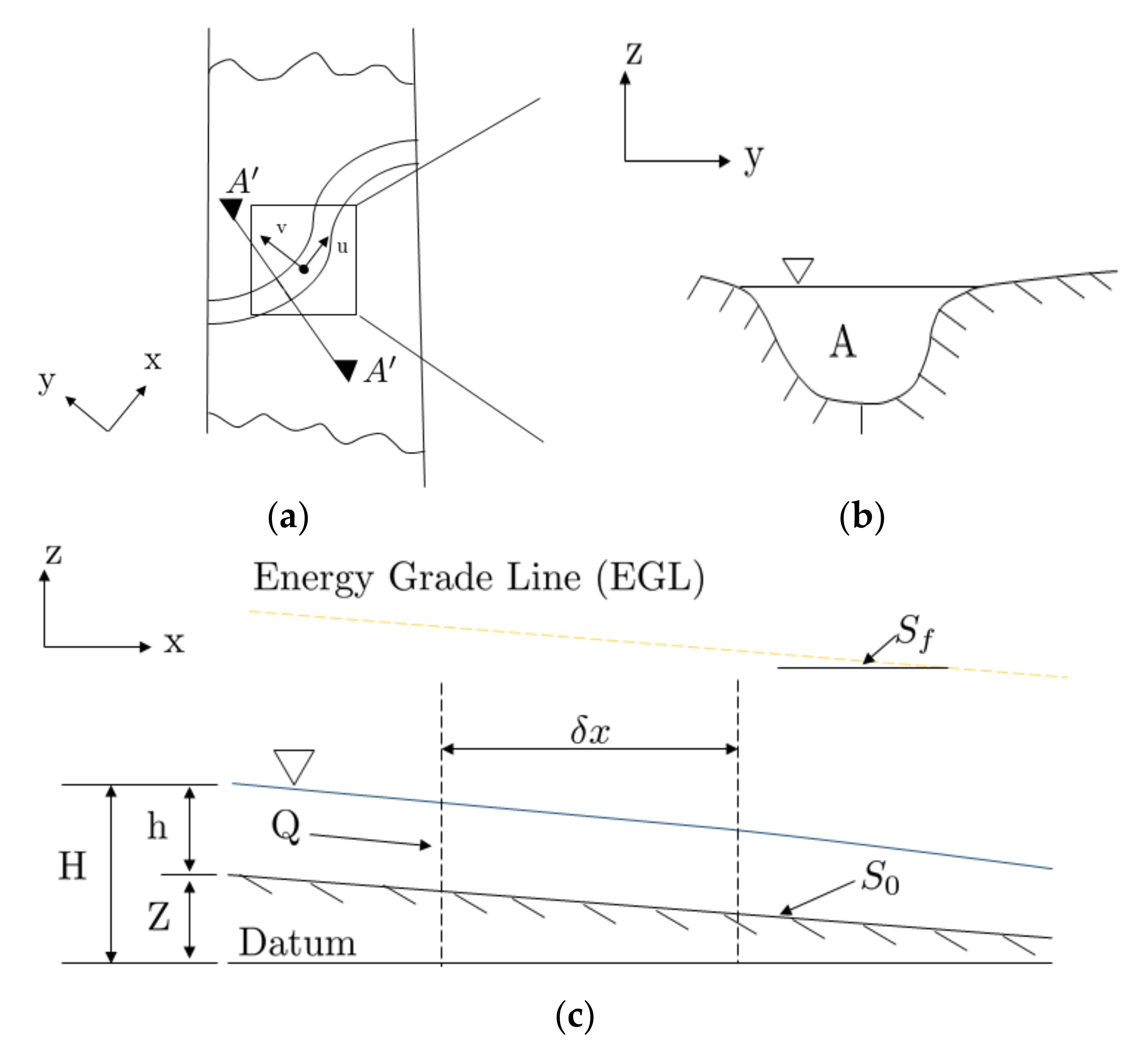
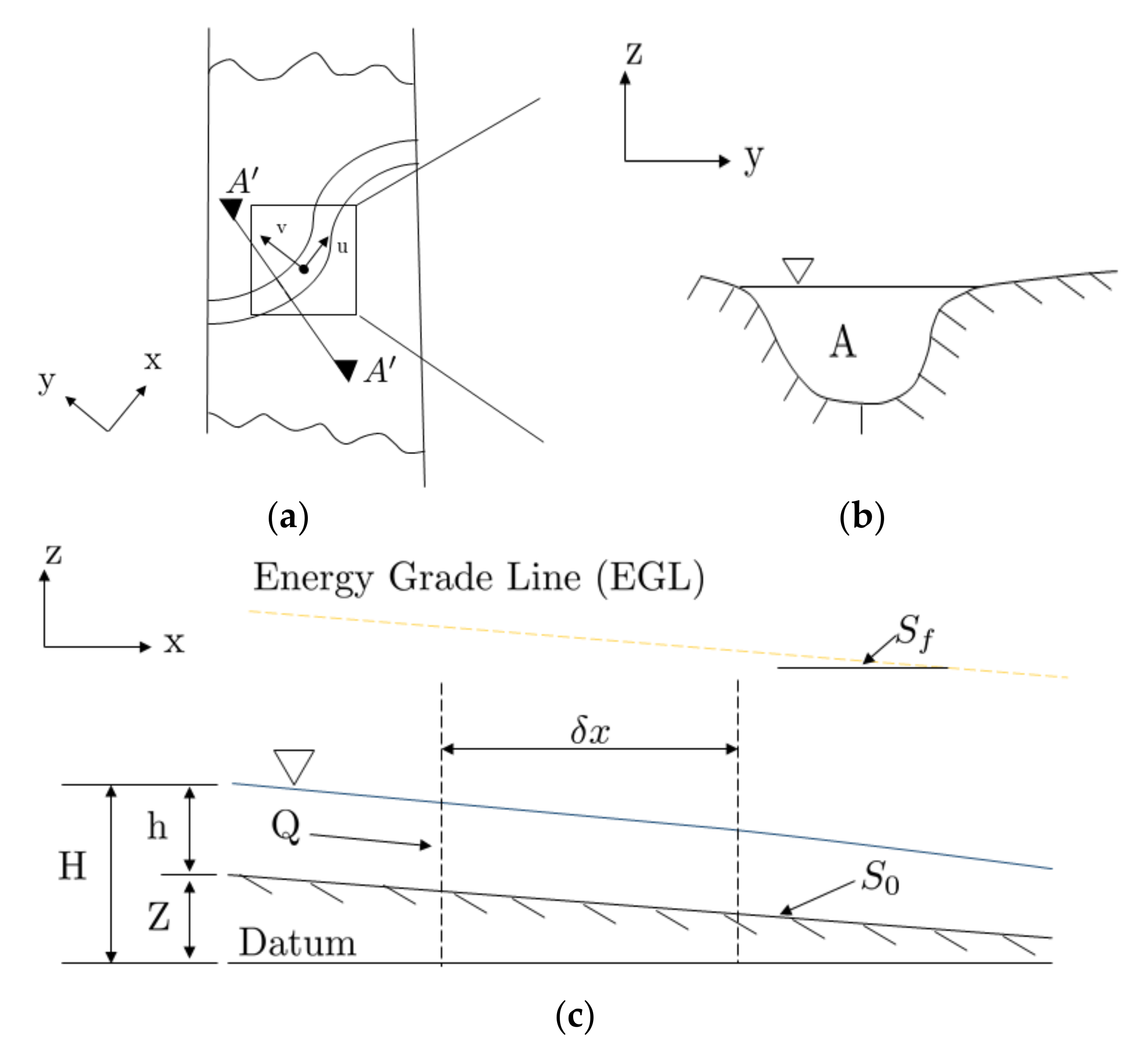
2.1. Governing Equations for 2D HEC-RAS Hydrodynamic Model
2.2. Governing Equations for 1D/2D HEC-RAS Hydrodynamic Model
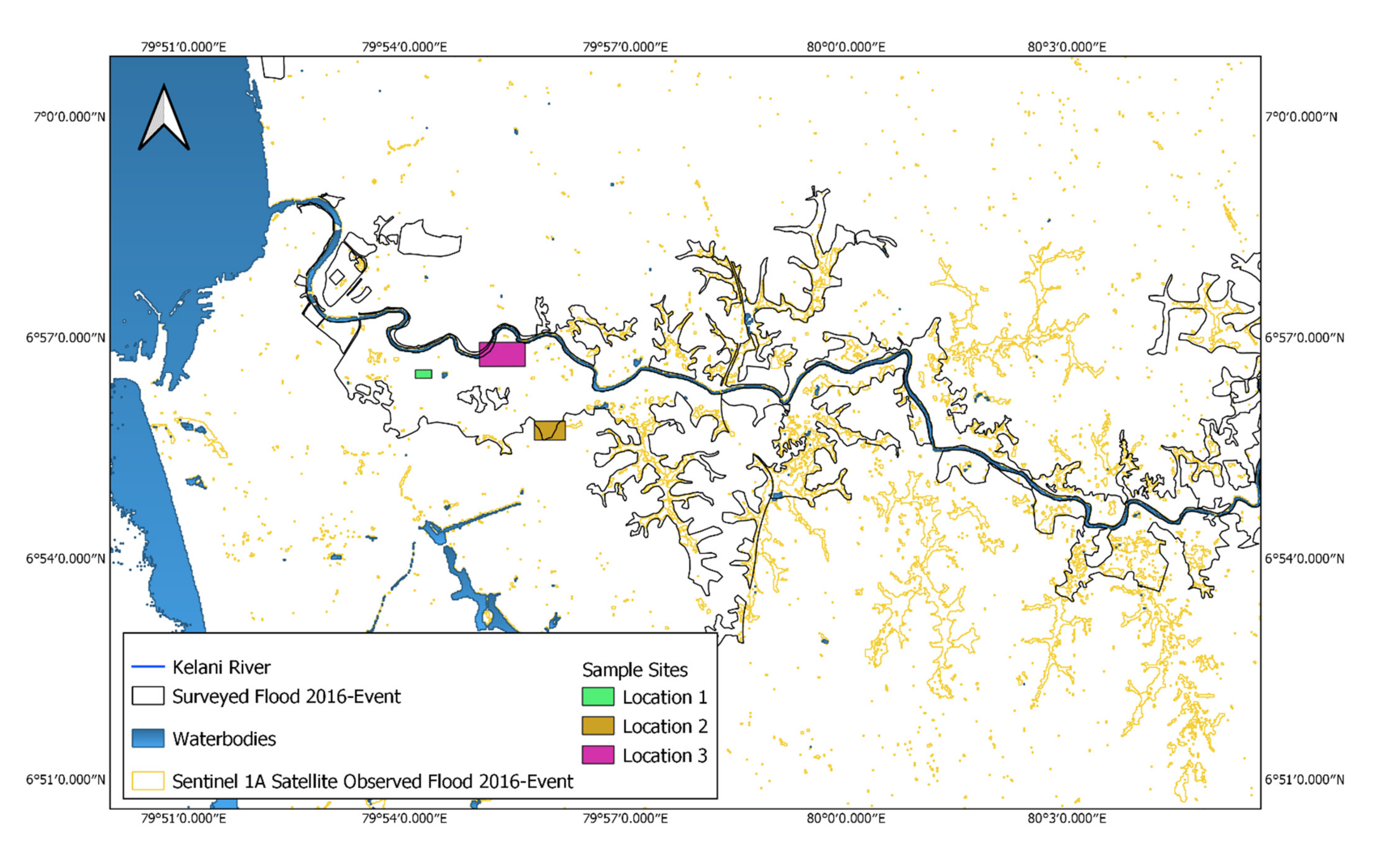
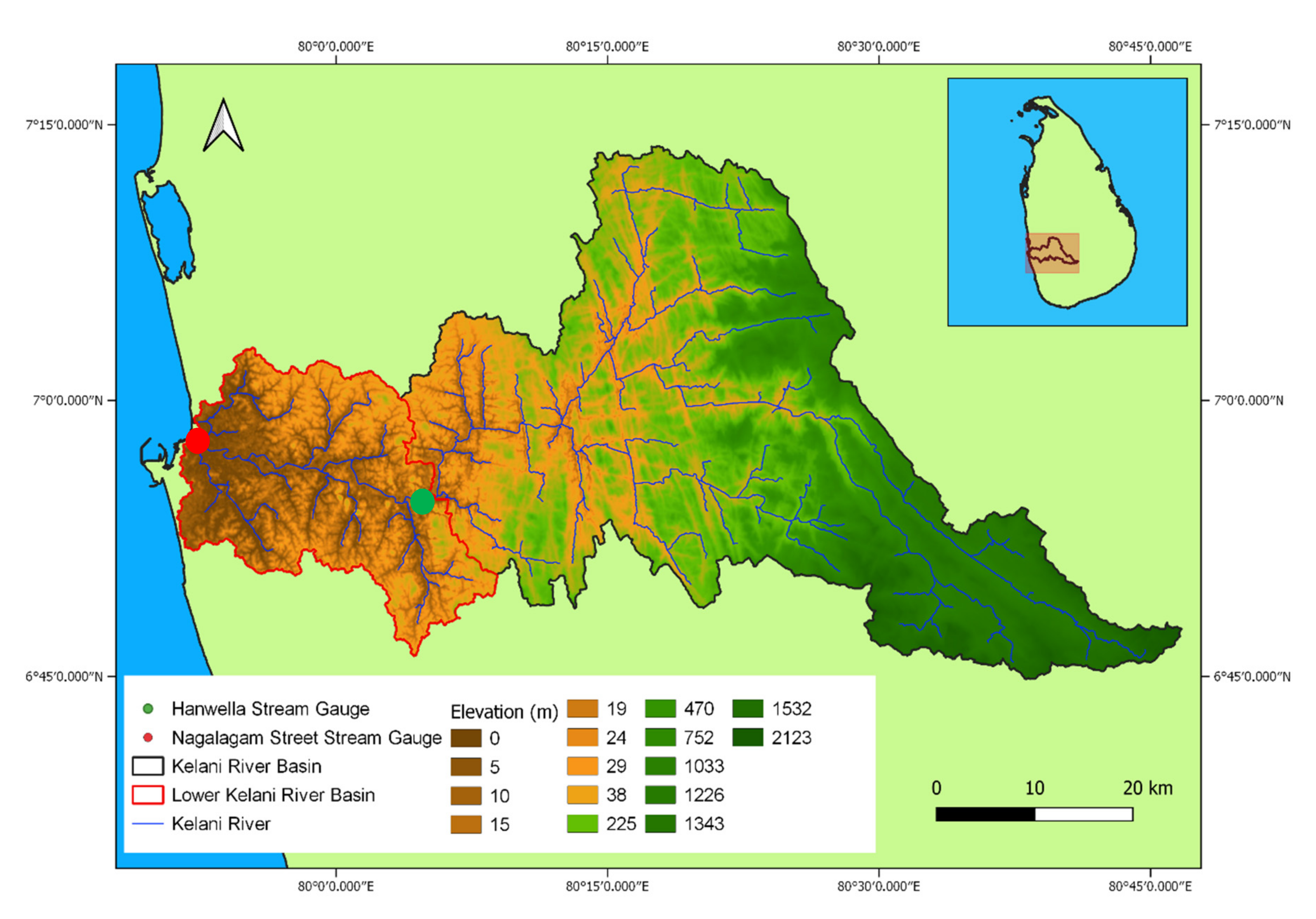
3. Case Study Application
4. Methodology
4.1. Overall Methodology
4.2. HEC-RAS Model Inputs
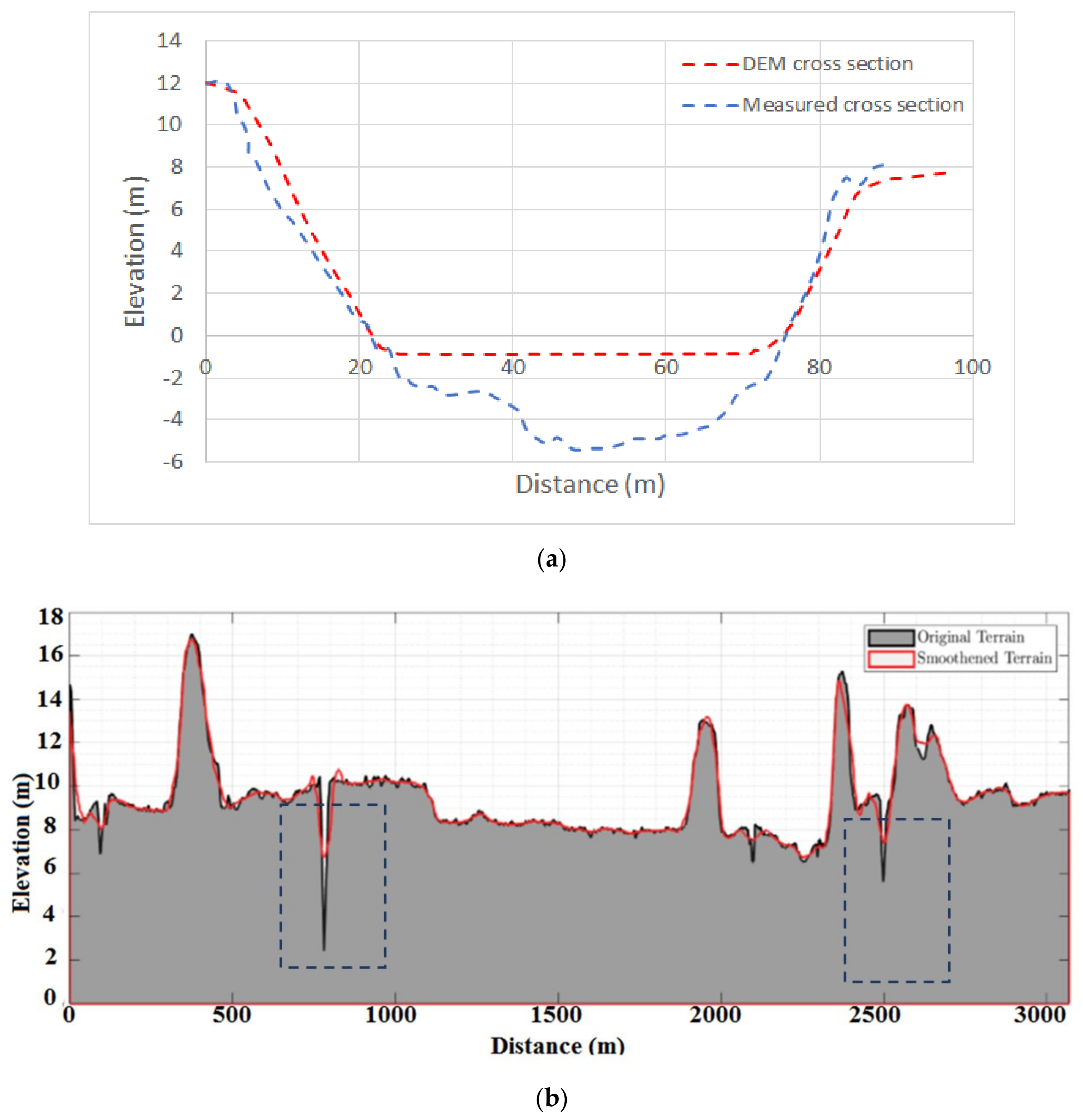
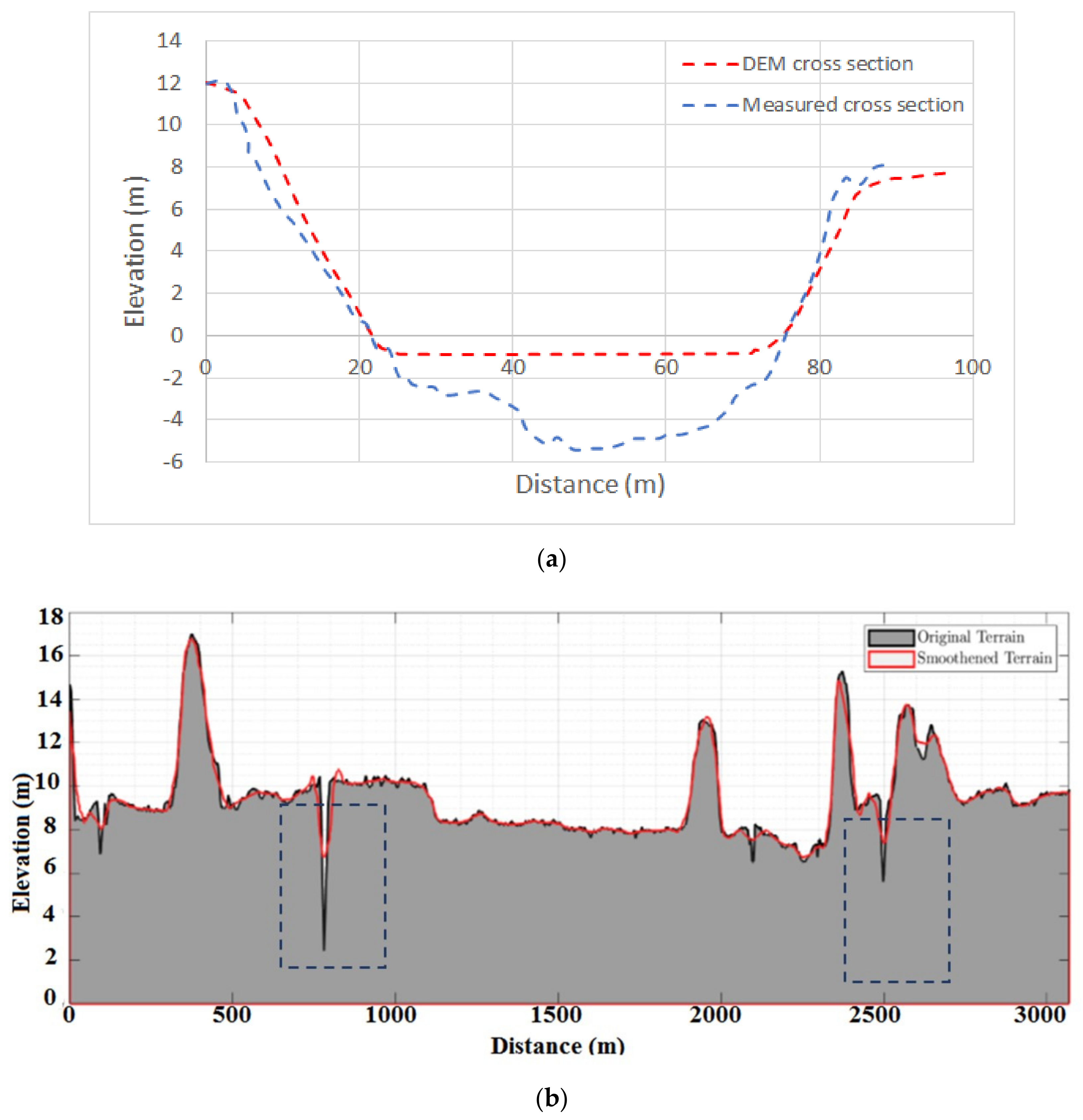
4.2.1. Elevation and Modification of River Bathymetry
4.2.2. Land Use Characteristics
4.2.3. Boundary Conditions
4.2.4. Implicit Weighting Factor, Calculation Time Step, and Optimal Mesh Size
4.3. Model Analysis and Results Comparison
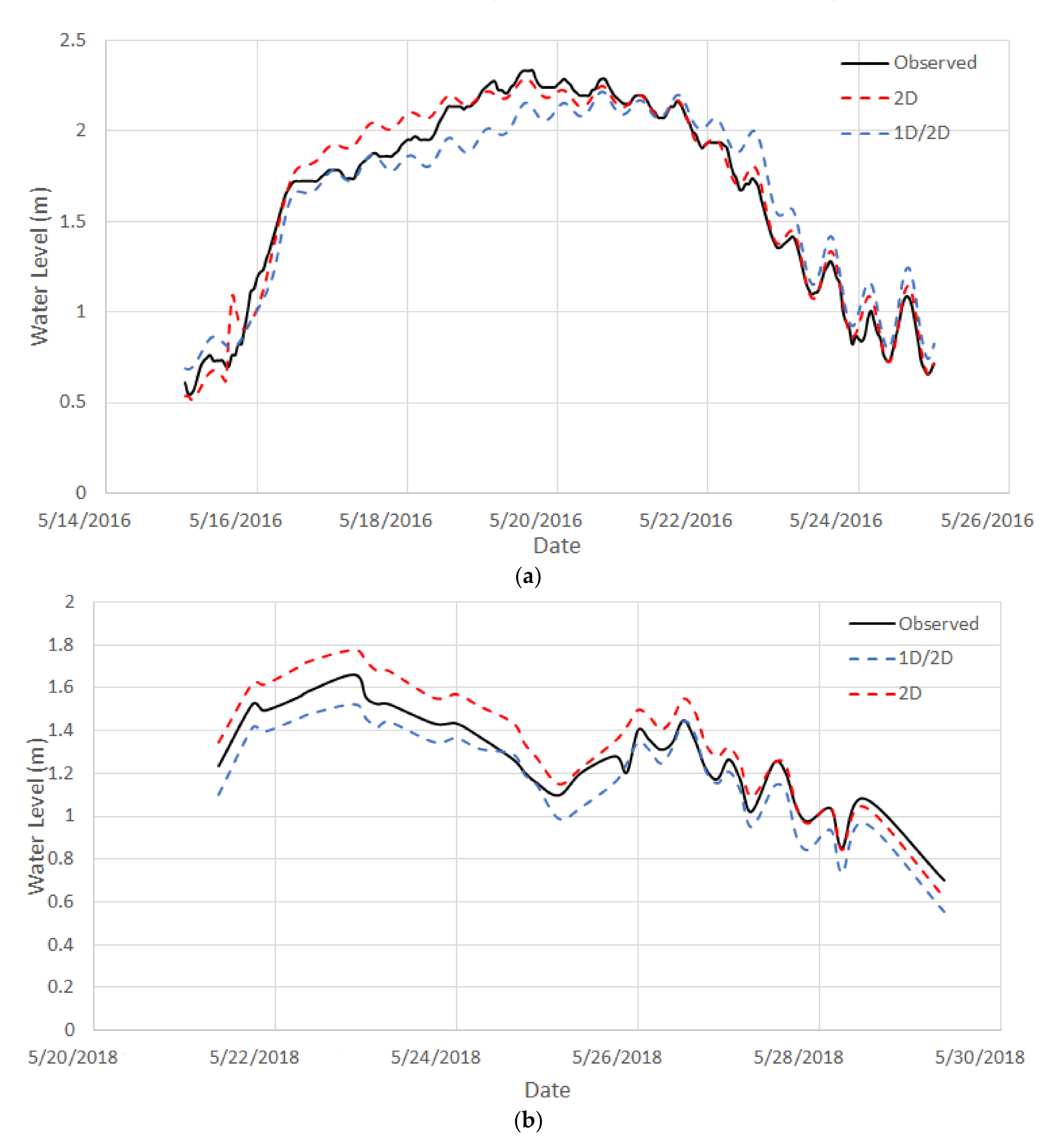
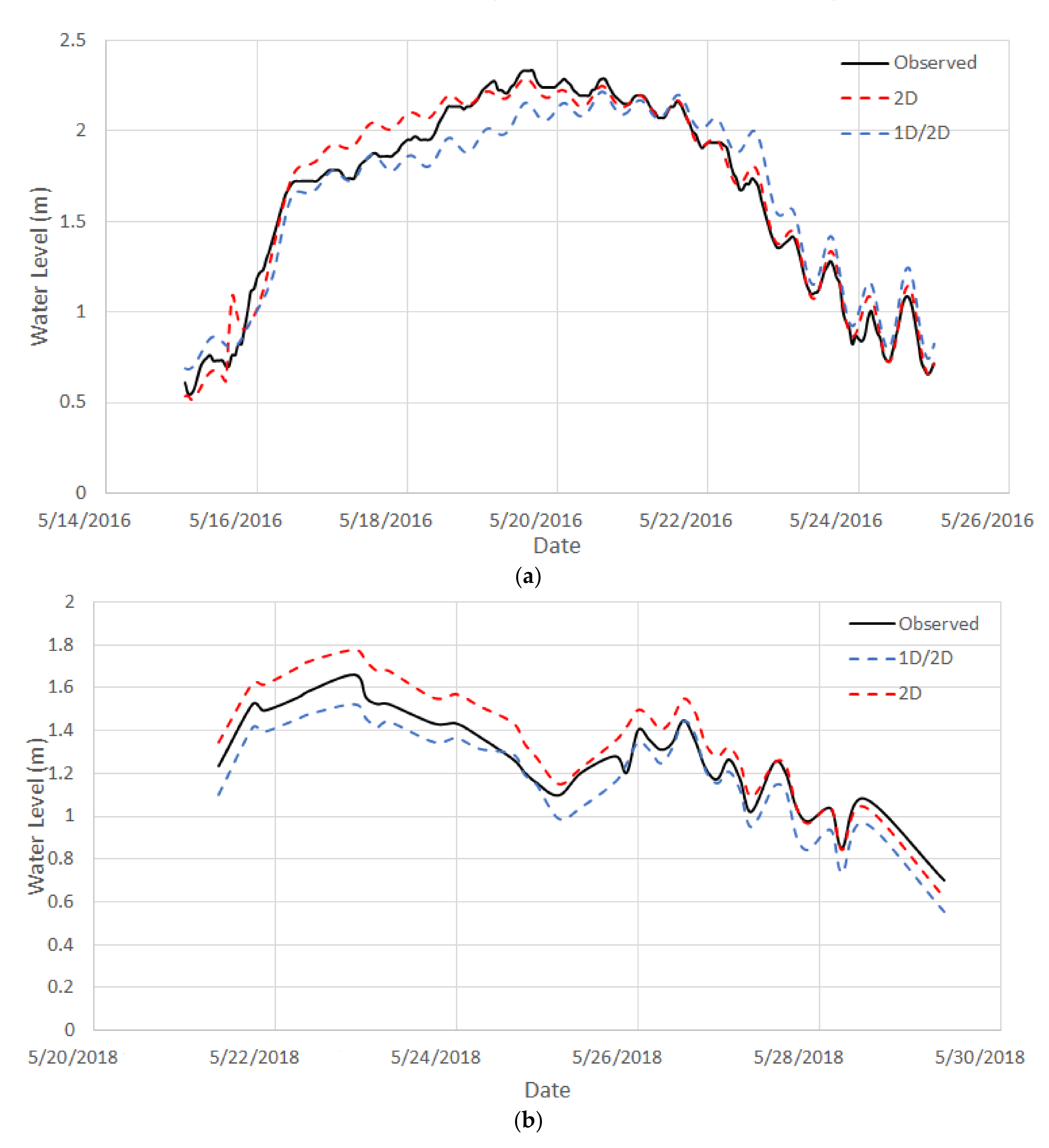
4.3.1. Water Level Comparison
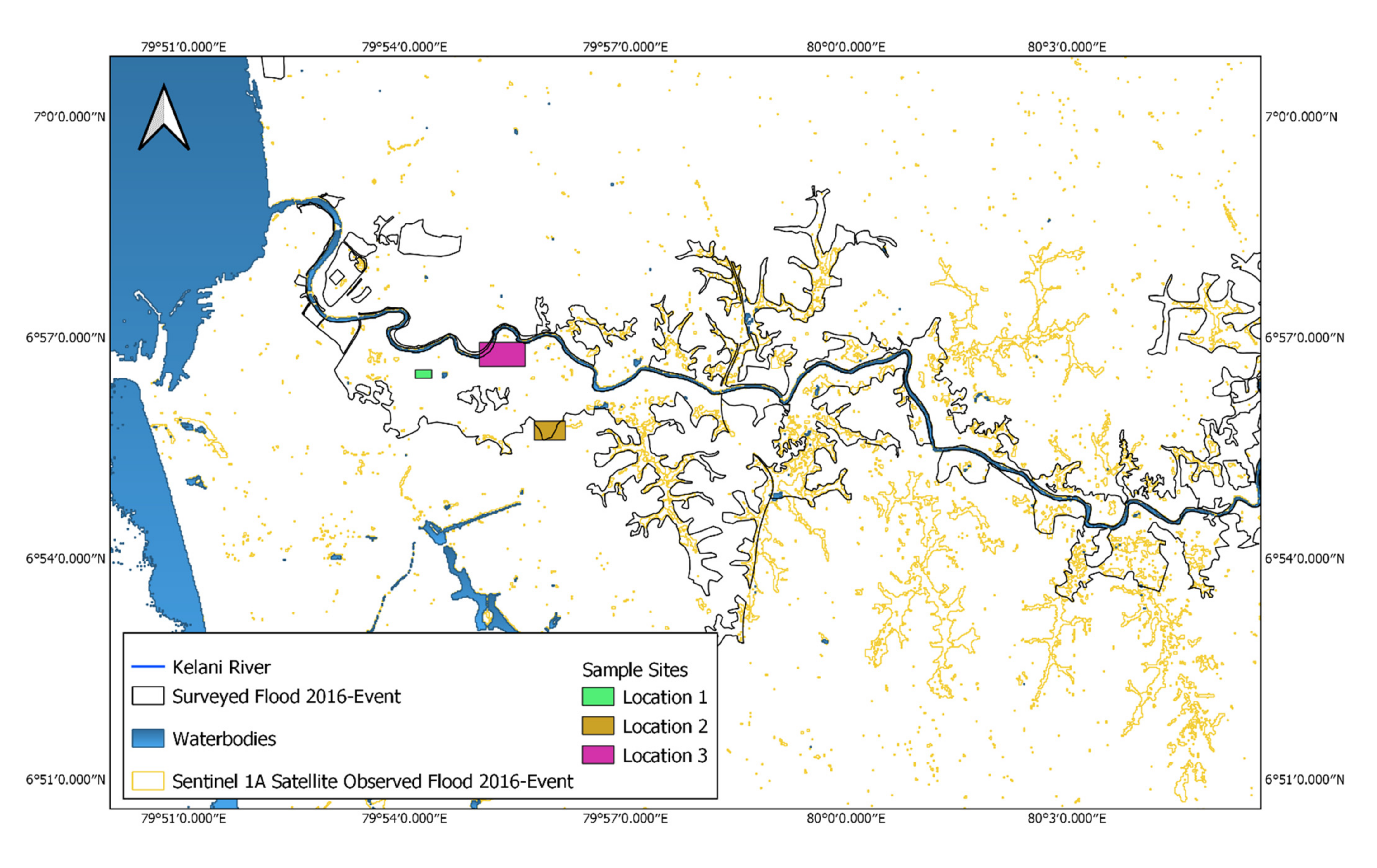
4.3.2. Inundation Extent Comparison
4.3.3. Calibration and Validation
5. Results and Discussion
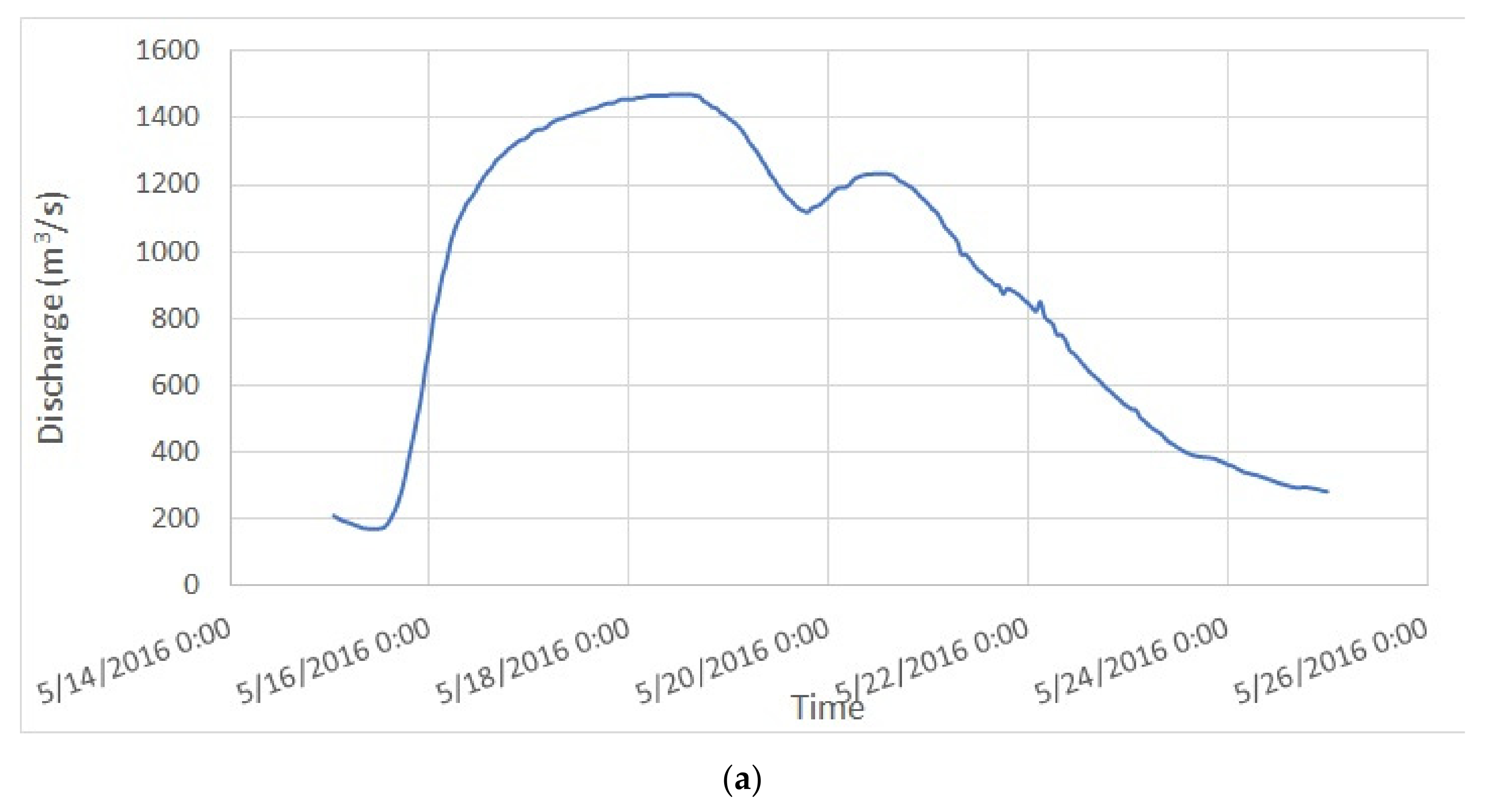
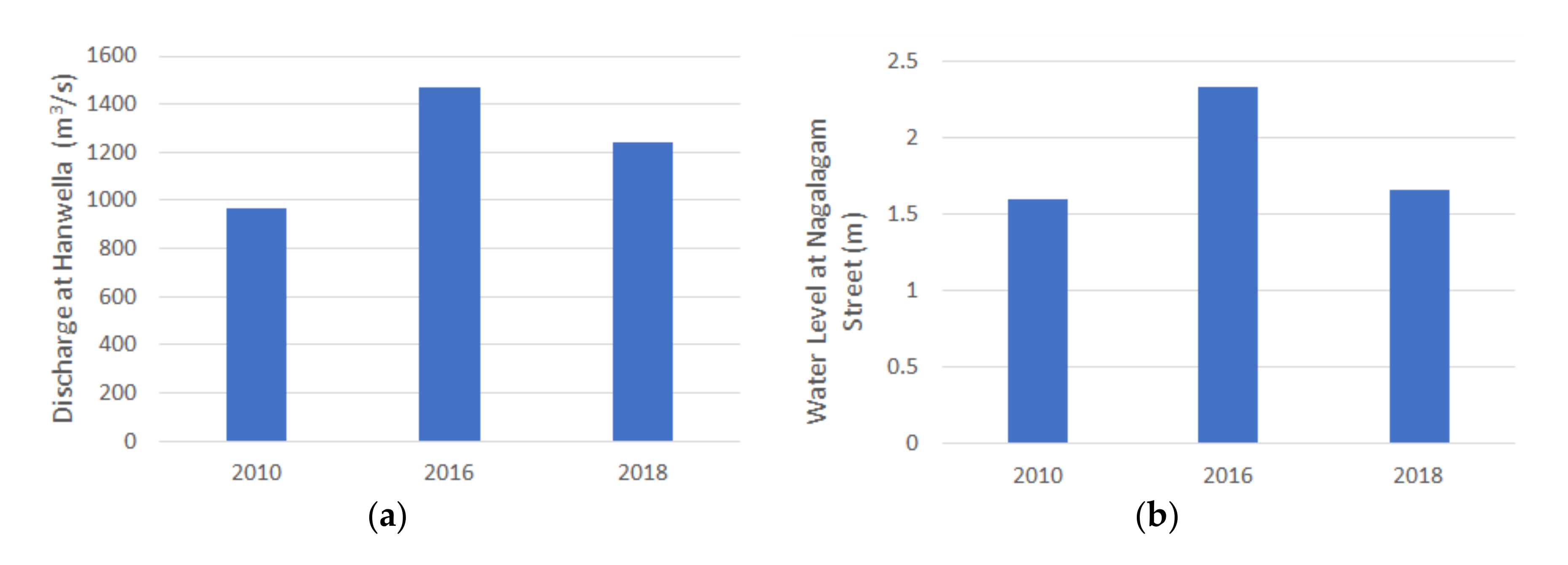
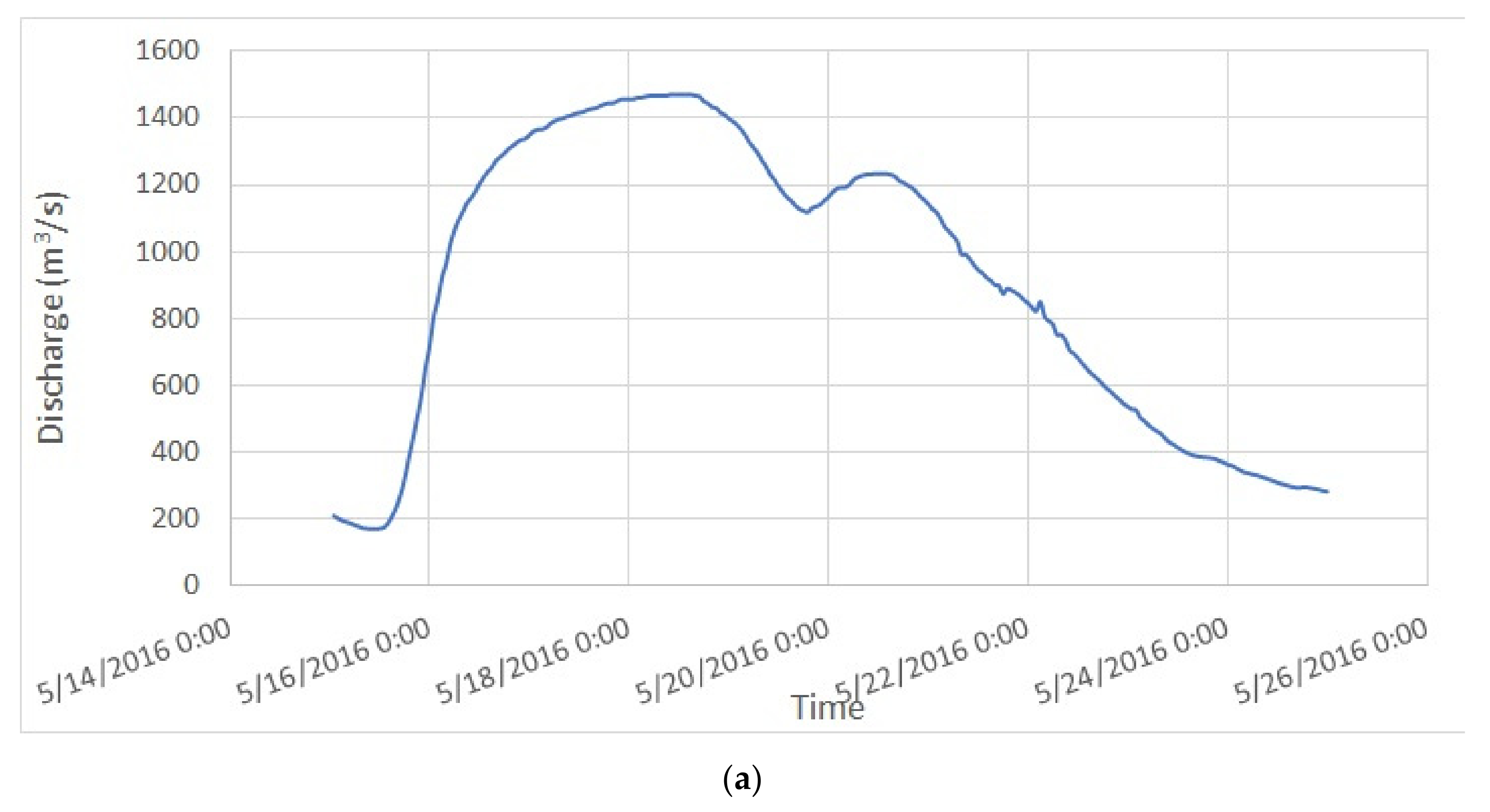
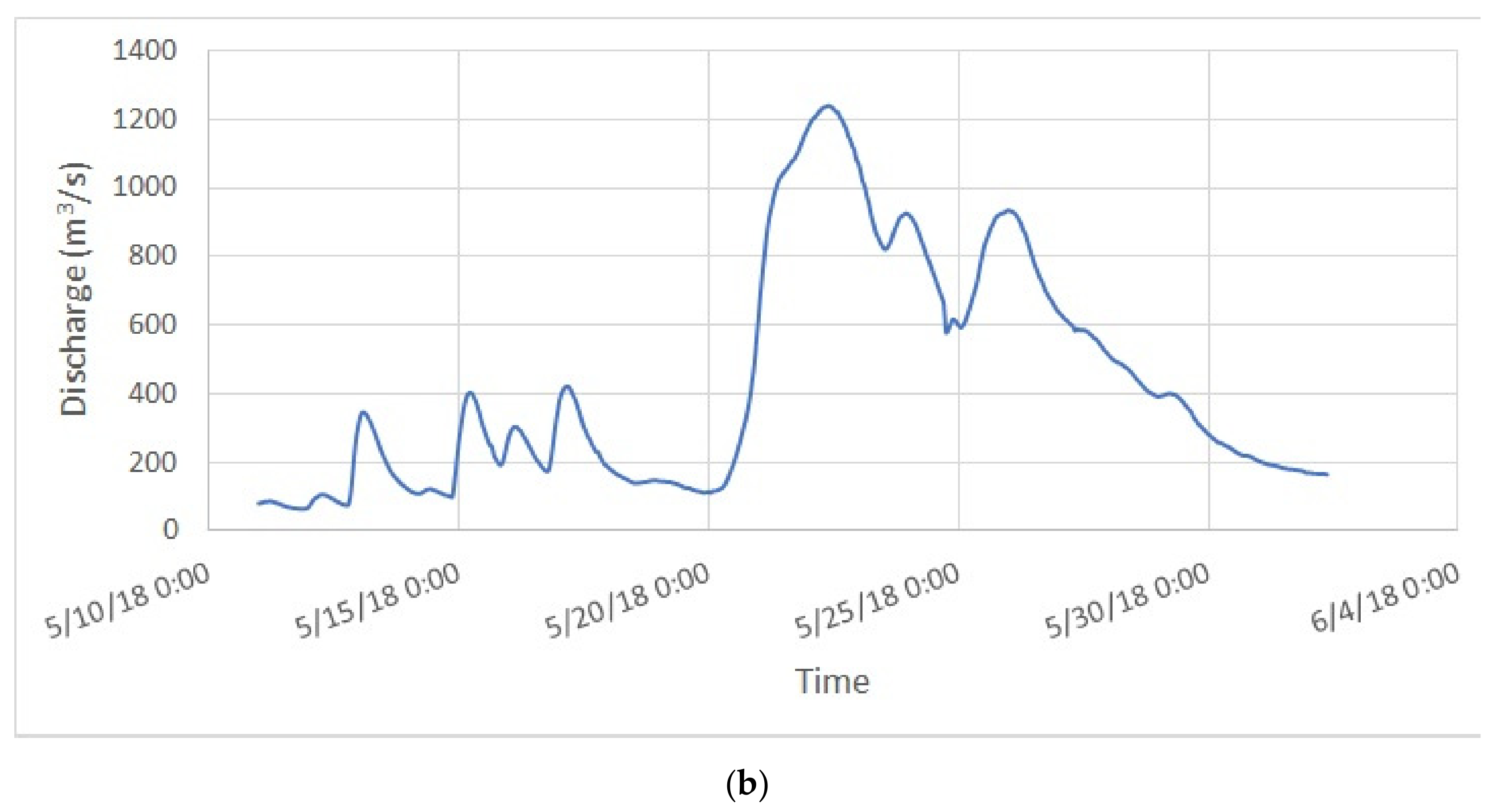
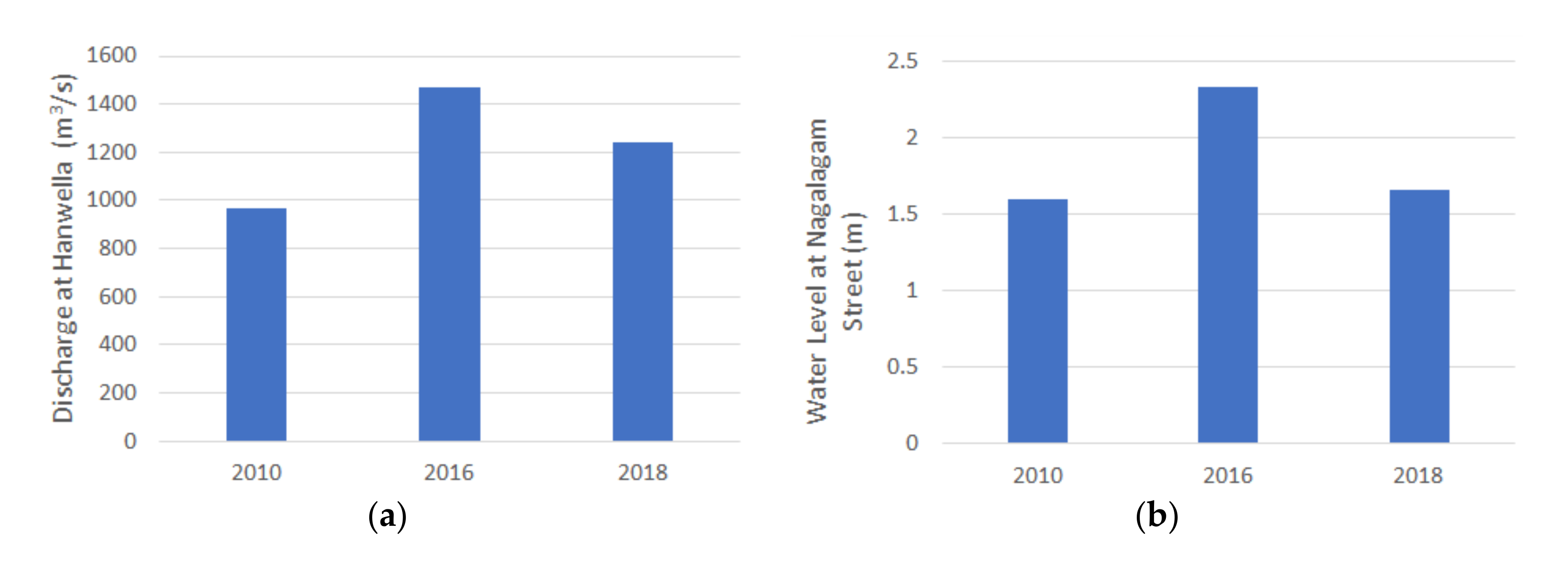
5.1. Comparison of 2016 and 2018 Flood Stages
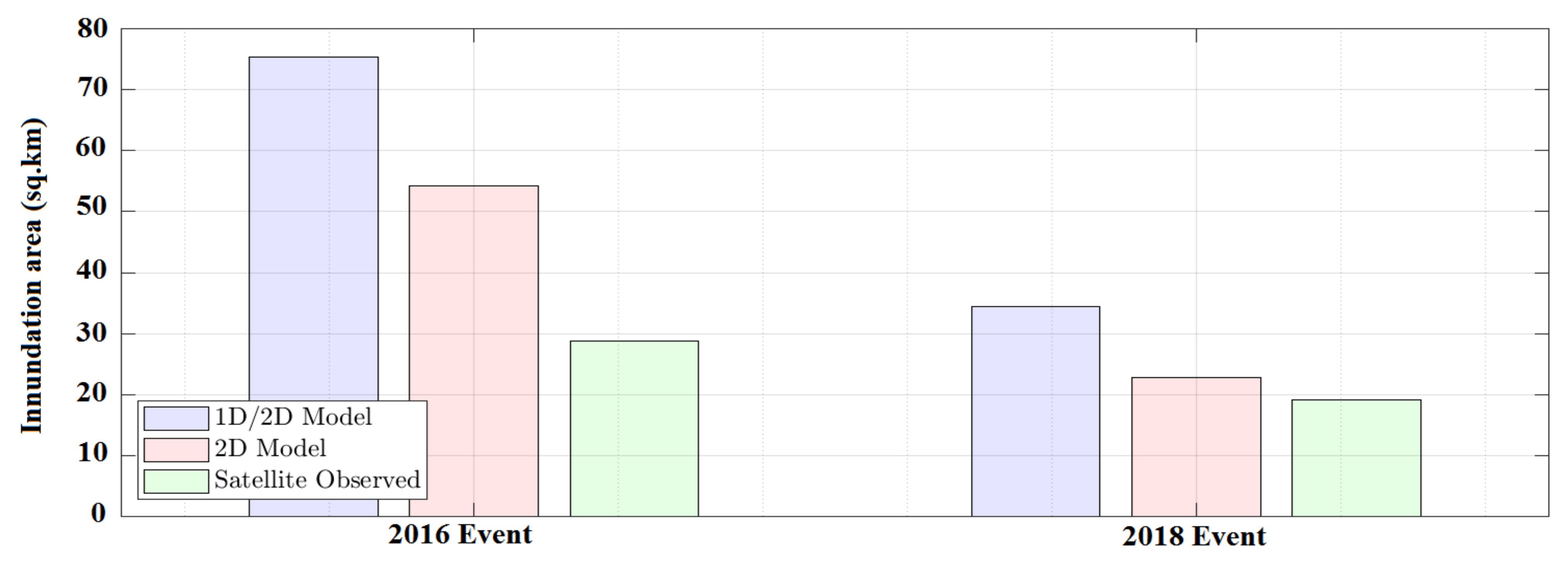
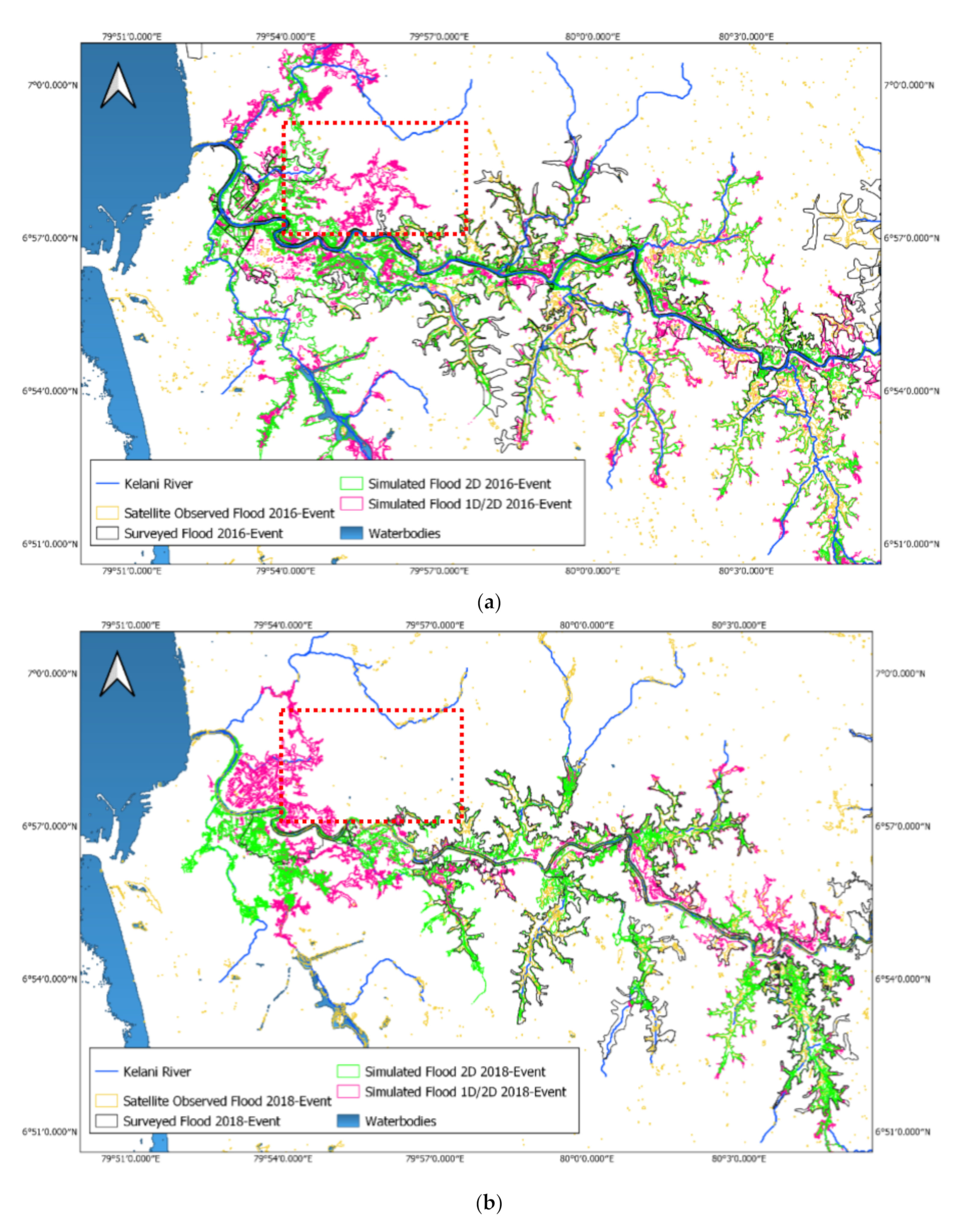
5.2. Inundation Extent Comparison
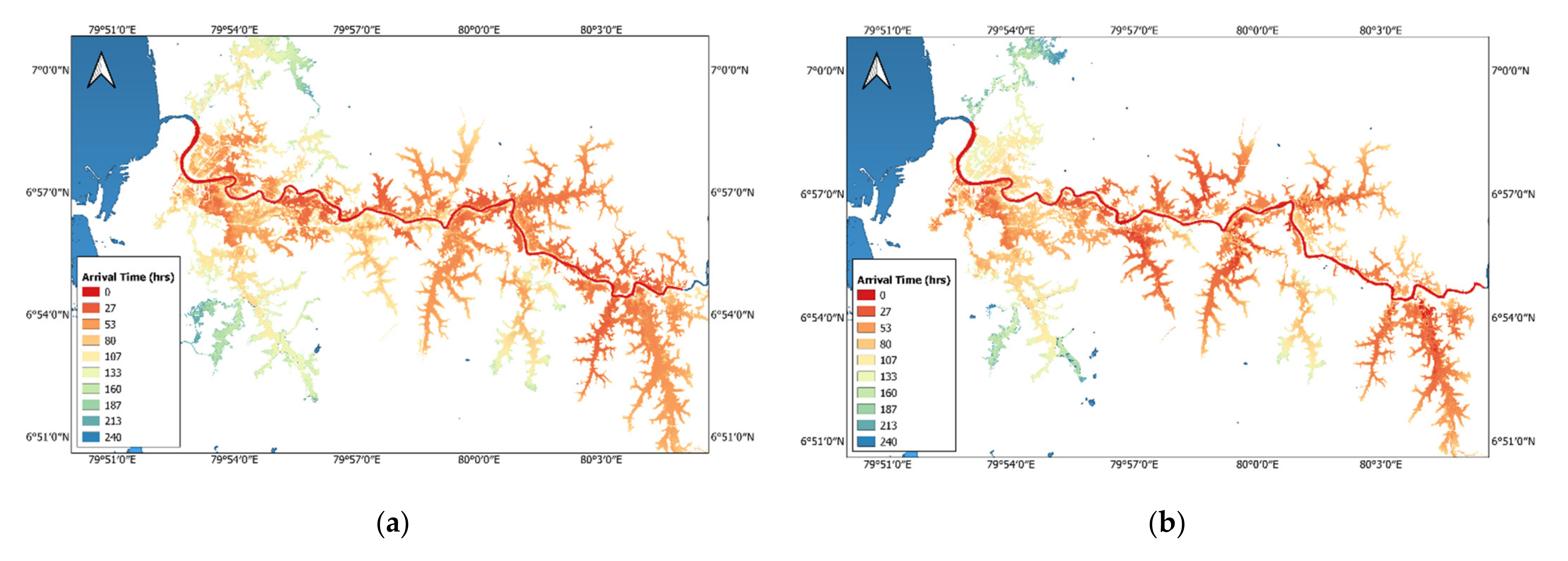
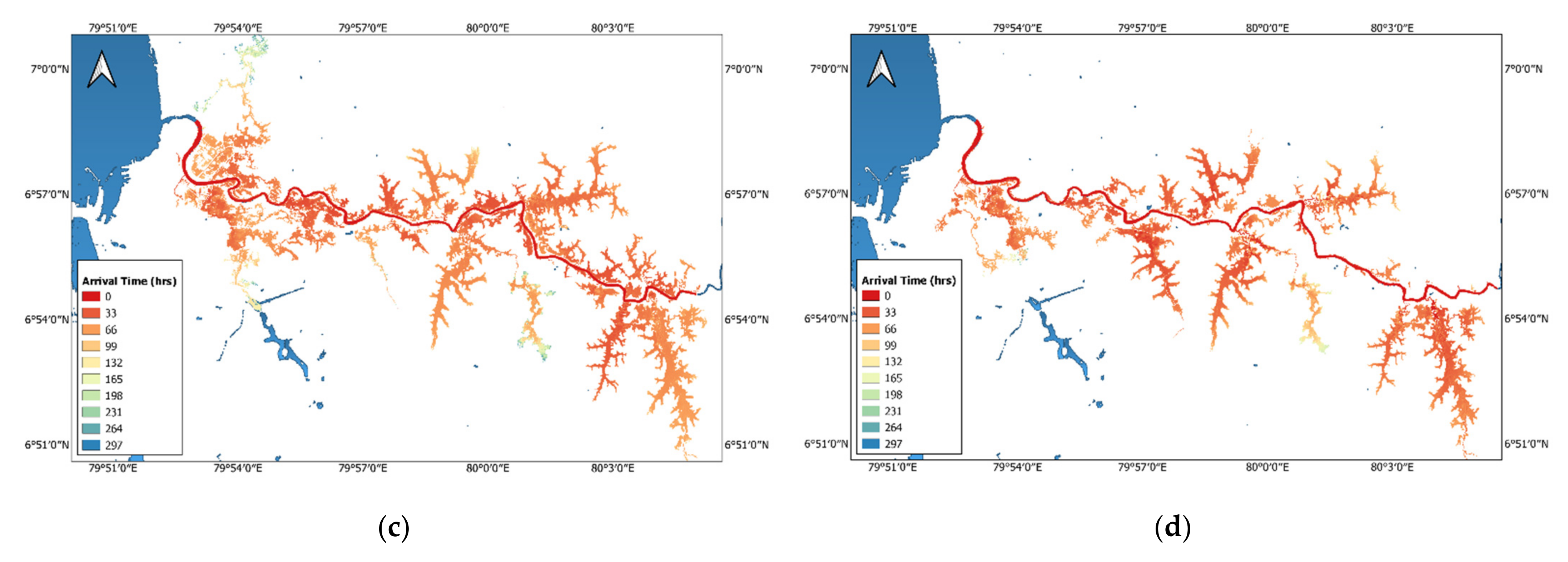
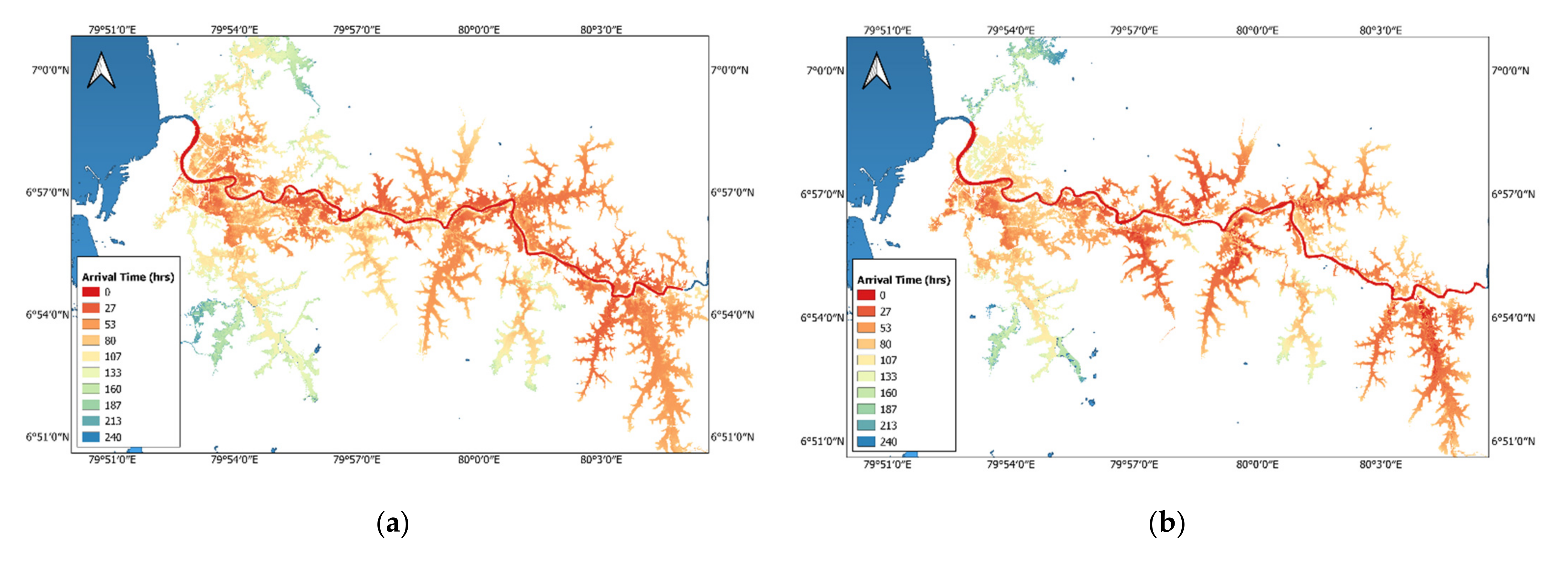
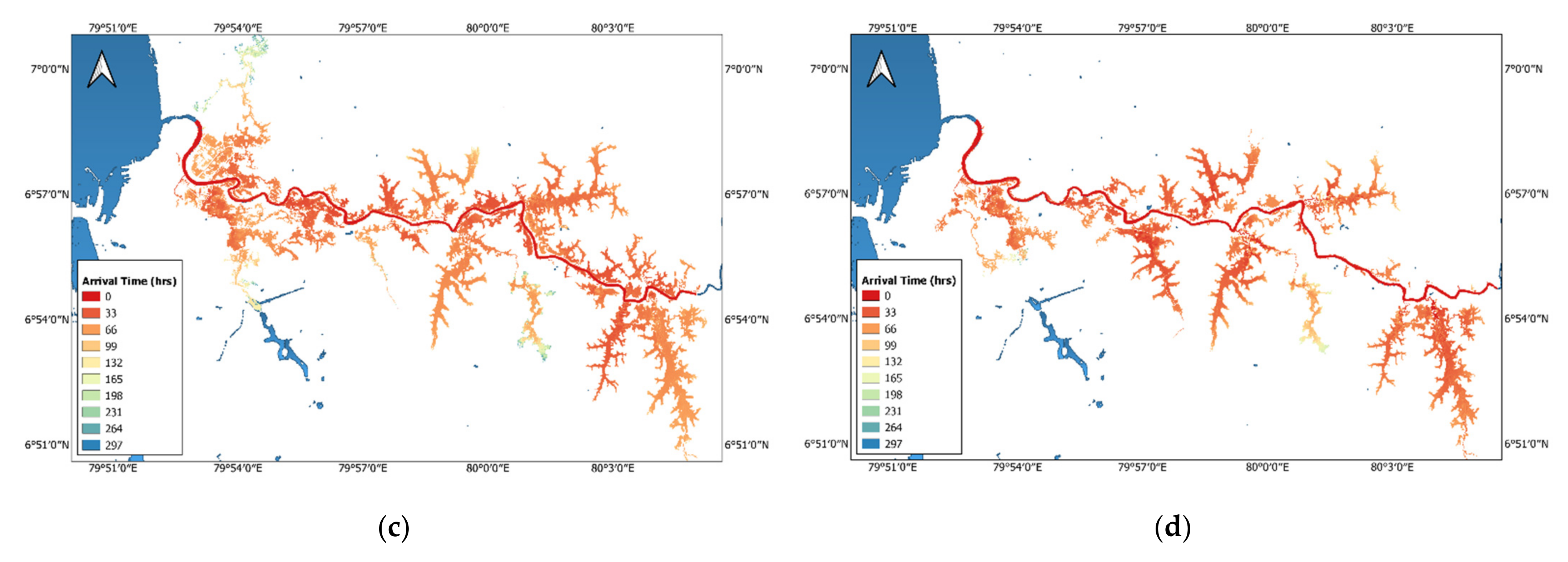
5.3. Travel Time Comparison
6. Summary and Conclusions
- The HEC-RAS 2D model was able to successfully capture the flow process when compared to the coupled 1D/2D HEC-RAS models during high flow conditions.
- The 1D/2D HEC-RAS model was a better predictor of flows when it came to low flow situations.
- Combining the prediction capability of flows during high flows and low flows, the HEC-RAS 1D/2D model is a better predictor than the 2D model.
- The HEC-RAS coupled 1D/2D model is a better predictor when predicting inundation extents during high flow and low flow situations.
- Overall, the HEC-RAS 1D/2D model is a better model compared to the 2D model in predicting inundation extents and the flows under high and low flow situations.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- UNISDR. The Human Costs of Weather-Related Disasters. 2015. Available online: https://www.unisdr.org/2015/docs/climatechange/COP21_WeatherDisastersReport_2015_FINAL.pdf (accessed on 30 December 2021).
- Caddis, B.; Nielsen, C.; Hong, W.; Tahir, P.A.; Teo, F.Y. Guidelines for floodplain development—A Malaysian case study. Int. J. River Basin Manag. 2012, 10, 161–170. [Google Scholar] [CrossRef]
- Nandalal, K. Use of a hydrodynamic model to forecast floods of Kalu River in Sri Lanka. J. Flood Risk Manag. 2009, 2, 151–158. [Google Scholar] [CrossRef]
- Apel, H.; Thieken, A.; Merz, B.; Bloschl, G. Flood risk assessment and associated uncertainty. Nat. Hazards Earth Syst. Sci. 2004, 4, 295–308. [Google Scholar] [CrossRef]
- Morris, M.; Hassan, M.; Vaskinn, K. Breach formation: Field test and laboratory experiments. J. Hydraul. Res. 2007, 45 (Suppl. 1), 9–17. [Google Scholar] [CrossRef]
- Thieken, A.H.; Kienzler, S.; Kreibich, H.; Kuhlicke, C.; Kunz, M.; Mühr, B.; Müller, M.; Otto, A.; Petrow, T.; Pisi, S.; et al. Review of the flood risk management system in Germany after the major flood in 2013. Ecol. Soc. 2016, 21, 51. [Google Scholar] [CrossRef]
- Vorogushyn, S.; Lindenschmidt, K.-E.; Kreibich, H.; Apel, H.; Merz, B. Analysis of a detention basin impact on dike failure probabilities and flood risk for a channel-dike-floodplain system along the river Elbe, Germany. J. Hydrol. 2012, 436–437, 120–131. [Google Scholar] [CrossRef] [Green Version]
- Barredo, J.I.; Sauri, D.; Llasat, M.C. Assessing trends in insured losses from floods in Spain 1971–2008. Nat. Hazards Earth Syst. Sci. 2012, 12, 1723–1729. [Google Scholar] [CrossRef] [Green Version]
- Cunderlik, J.M.; Ouarda, T.B. Trends in the timing and magnitude of floods in Canada. J. Hydrol. 2009, 375, 471–480. [Google Scholar] [CrossRef]
- Kundzewicz, Z.W.; Pińskwar, I.; Brakenridge, G.R. Large floods in Europe, 1985–2009. Hydrol. Sci. J. 2013, 58, 1–7. [Google Scholar] [CrossRef]
- Najibi, N.; Devineni, N. Recent trends in the frequency and duration of global floods. Earth Syst. Dyn. 2018, 9, 757–783. [Google Scholar] [CrossRef] [Green Version]
- Baker, J.L. Climate Change, Disaster Risk, and the Urban Poor: Cities Building Resilience for a Changing World; The World Bank: Washington, DC, USA, 2012. [Google Scholar]
- Egbinola, C.; Olaniran, H.; Amanambu, A. Flood management in cities of developing countries: The example of Ibadan, Nigeria. J. Flood Risk Manag. 2017, 10, 546–554. [Google Scholar] [CrossRef]
- Teo, F.Y.; Falconer, R.A.; Lin, B.; Xia, J. Investigations of hazard risks relating to vehicles moving in flood. J. Water Resour. Manag. 2012, 1, 52–66. [Google Scholar]
- Teo, F.Y.; Xia, J.; Falconer, R.A.; Lin, B. Experimental studies on the interaction between vehicles and floodplain flows. Int. J. River Basin Manag. 2012, 10, 149–160. [Google Scholar] [CrossRef]
- Daksiya, V.; Mandapaka, P.V.; Lo, E.Y.M. Effect of climate change and urbanisation on flood protection decision-making. J. Flood Risk Manag. 2020, 14, e12681. [Google Scholar] [CrossRef]
- Kay, A.; Rudd, A.; Fry, M.; Nash, G.; Allen, S. Climate change impacts on peak river flows: Combining national-scale hydrological modelling and probabilistic projections. Clim. Risk Manag. 2021, 31, 100263. [Google Scholar] [CrossRef]
- Mehryar, S.; Surminski, S. National laws for enhancing flood resilience in the context of climate change: Potential and shortcomings. Clim. Policy 2021, 21, 133–151. [Google Scholar] [CrossRef]
- Ponting, J.; Kelly, T.J.; Verhoef, A.; Watts, M.; Sizmur, T. The impact of increased flooding occurrence on the mobility of potentially toxic elements in floodplain soil—A review. Sci. Total Environ. 2021, 754, 142040. [Google Scholar] [CrossRef]
- Lea, D.; Yeonsu, K.; Hyunuk, A. Case study of HEC-RAS 1D–2D coupling simulation: 2002 Baeksan flood event in Korea. Water 2019, 11, 2048. [Google Scholar]
- Vozinaki, A.-E.K.; Morianou, G.G.; Alexakis, D.D.; Tsanis, I.K. Comparing 1D and combined 1D/2D hydraulic simulations using high-resolution topographic data: A case study of the Koiliaris basin, Greece. Hydrol. Sci. J. 2016, 62, 642–656. [Google Scholar] [CrossRef]
- Betsholtz, A.N.B. Potentials and Limitations of 1D, 2D and Coupled 1D-2D Flood Modelling in HEC-RAS. Master’s Thesis, Lund University, Lund, Sweden, 2017; pp. 1–128, Report number TVVR17/5003. [Google Scholar]
- Cook, A.; Merwade, V. Effect of topographic data, geometric configuration and modeling approach on flood inundation mapping. J. Hydrol. 2009, 377, 131–142. [Google Scholar] [CrossRef]
- Horritt, M.; Bates, P. Evaluation of 1D and 2D numerical models for predicting river flood inundation. J. Hydrol. 2002, 268, 87–99. [Google Scholar] [CrossRef]
- Timbadiya, P.V.; Patel, P.L.; Porey, P.D. Calibration of HEC-RAS model on prediction of flood for lower Tapi River, India. J. Water Resour. Prot. 2011, 3, 805–811. [Google Scholar] [CrossRef] [Green Version]
- Jun, S.M.; Song, J.-H.; Choi, S.-K.; Lee, K.-D.; Kang, M.S. Combined 1D/2D Inundation Simulation of Riverside Farmland using HEC-RAS. J. Korean Soc. Agric. Eng. 2018, 60, 135–147. [Google Scholar] [CrossRef]
- Patel, D.P.; Ramirez, J.A.; Srivastava, P.K.; Bray, M.; Han, D. Assessment of flood inundation mapping of Surat city by coupled 1D/2D hydrodynamic modeling: A case application of the new HEC-RAS 5. Nat. Hazards 2017, 89, 93–130. [Google Scholar] [CrossRef]
- Pasquier, U.; He, Y.; Hooton, S.; Goulden, M.; Hiscock, K.M. An integrated 1D–2D hydraulic modelling approach to assess the sensitivity of a coastal region to compound flooding hazard under climate change. Nat. Hazards 2018, 98, 915–937. [Google Scholar] [CrossRef] [Green Version]
- Brunner, G. HEC—RAS, River Analysis System Hydraulic Reference Manual; US Army Corps Engineers, Hydrologic Engineering Center: Davis, CA, USA, 2016. [Google Scholar]
- Brunner, G. HEC-RAS 5.0 2D Modeling User’s Manual; US Army Corps Engineers, Hydrologic Engineering Center: Davis, CA, USA, 2016. [Google Scholar]
- Raman, A.; Liu, F. An investigation of the Brumadinho Dam Break with HEC RAS simulation. arXiv 2019, arXiv:1911.05219. [Google Scholar]
- Gunathilaka, M.; Wikramanayake, W.; Perera, D.; Lanka, S. Identifying the impact of tidal level variation on river basin flooding. In Proceedings of the National Conference on Water, Food Security, and Climate Change in Sri Lanka, BMICH, Colombo, Sri Lanka, 9–11 June 2009; Water Quality, Environment, and Climate Change. IWMI: Colombo, Sri Lanka, 2010; Volume 2, p. 119. [Google Scholar]
- Hettiarachchi, P. Hydrological Report on the Kelani River Flood in May 2016; Department of Irrigation: Colombo, Sri Lanka, 2020. [Google Scholar]
- Brunner, G. Combined 1D and 2D Modelling with HEC–RAS, v. 5; US Army Corps Engineers, Hydrologic Engineering Center: Davis, CA, USA, 2016. [Google Scholar]
- Podhorányi, M.; Fedorcak, D. Inaccuracy introduced by LiDAR-generated cross sections and its impact on 1D hydrodynamic simulations. Environ. Earth Sci. 2015, 73, 1–11. [Google Scholar] [CrossRef]
- Gorry, P.A. General least-squares smoothing and differentiation by the convolution (Savitzky-Golay) method. Anal. Chem. 1990, 62, 570–573. [Google Scholar] [CrossRef]
- De Silva, M.M.G.T.; Weerakoon, S.B.; Herath, S. Modeling of event and continuous flow hydrographs with HEC–HMS: Case study in the Kelani River Basin, Sri Lanka. J. Hydrol. Eng. 2014, 19, 800–806. [Google Scholar] [CrossRef]
- Chow, V.T. Open-Channel Hydraulics; McGraw-Hill Civil Engineering Series; Kogakusha Company LTD: Tokyo, Japan; McGraw-Hill Publishers: New York, NY, USA, 1959. [Google Scholar]
- Bakhtyar, R.; Maitaria, K.; Velissariou, P.; Trimble, B.; Mashriqui, H.; Moghimi, S.; Abdolali, A.; Van Der Westhuysen, A.J.; Ma, Z.; Clark, E.P.; et al. A New 1D/2D coupled modeling approach for a riverine-estuarine system under storm events: Application to Delaware River Basin. J. Geophys. Res. Oceans 2020, 125, e2019JC015822. [Google Scholar] [CrossRef]
- Brunner, G. HEC—RAS River Analysis System User’s Manual Version 5.0; US Army Corps Engineers, Hydrologic Engineering Center: Davis, CA, USA, 2016. [Google Scholar]
- Nash, J.E.; Sutcliffe, J.V. River flow forecasting through conceptual models part I—A discussion of principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Bennett, N.D.; Croke, B.F.W.; Guariso, G.; Guillaume, J.H.A.; Hamilton, S.H.; Jakeman, A.J.; Marsili-Libell, S.; Newham, L.T.; Norton, J.P.; Perrin, C.; et al. Characterising performance of environmental models. Environ. Model. Softw. 2013, 40, 1–20. [Google Scholar] [CrossRef]
- Falter, D.; Schröter, K.; Dung, N.V.; Vorogushyn, S.; Kreibich, H.; Hundecha, Y.; Apel, H.; Merz, B. Spatially coherent flood risk assessment based on long-term continuous simulation with a coupled model chain. J. Hydrol. 2015, 524, 182–193. [Google Scholar] [CrossRef] [Green Version]
- Khaing, Z.M.; Zhang, K.; Sawano, H.; Shrestha, B.; Sayama, T.; Nakamura, K. Flood hazard mapping and assessment in data-scarce Nyaungdon area, Myanmar. PLoS ONE 2019, 14, e0224558. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Moriasi, D.N.; Arnold, J.G.; Van Liew, M.W.; Bingner, R.L.; Harmel, R.D.; Veith, T.L. Model evaluation guidelines for systematic quantification of accuracy in watershed simulations. Trans. Am. Soc. Agric. Biol. Eng. 2007, 50, 885–900. [Google Scholar]
- De Silva, M.M.G.T.; Weerakoon, S.B.; Herath, S.; Ratnayake, U.R.; Mahanama, S. Flood Inundation Mapping along the Lower Reach of Kelani River Basin under the Impact of Climatic Change. Eng. J. Inst. Eng. Sri Lanka 2012, 45, 23. [Google Scholar] [CrossRef] [Green Version]
- Solbø, S.; Solheim, I. Towards Operational Flood Mapping with Satellite SAR; European Space Agency, (Special Publication) ESA SP: Paris, France, 2005. [Google Scholar]
- University of Kelaniya. Sri Lanka: Science and Technology Human Resource Development Project Proposed Faculty of Computing and Technology Building Complex; Part II-Annexes; University of Kelaniya: Colombo, Sri Lanka, 2018. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Statistical Parameters | 2016 Event | 2018 Event | ||
|---|---|---|---|---|
| 2D | 1D/2D | 2D | 1D/2D | |
| R2 | 0.98 | 0.95 | 0.97 | 0.95 |
| NSE | 0.98 | 0.91 | 0.72 | 0.80 |
| RMSE | 0.08 | 0.14 | 0.11 | 0.09 |
| Statistical Parameter | 2016 | 2018 | Average | Average | ||
|---|---|---|---|---|---|---|
| 1D/2D | 2D | 1D/2D | 2D | 1D/2D | 2D | |
| FAI | 0.51 | 0.36 | 0.55 | 0.26 | 0.53 | 0.31 |
| Accuracy | 0.88 | 0.86 | 0.94 | 0.89 | 0.91 | 0.88 |
| Bias Score | 1.97 | 1.49 | 1.35 | 0.99 | 1.66 | 1.23 |
| Hit rate | 0.97 | 0.68 | 0.83 | 0.41 | 0.90 | 0.55 |
| False Alarm Ratio | 0.48 | 0.50 | 0.34 | 0.50 | 0.41 | 0.50 |
| False Alarm Rate | 0.13 | 0.12 | 0.05 | 0.06 | 0.09 | 0.09 |
| Success Index | 0.92 | 0.78 | 0.89 | 0.68 | 0.90 | 0.73 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Samarasinghe, J.T.; Basnayaka, V.; Gunathilake, M.B.; Azamathulla, H.M.; Rathnayake, U. Comparing Combined 1D/2D and 2D Hydraulic Simulations Using High-Resolution Topographic Data: Examples from Sri Lanka—Lower Kelani River Basin. Hydrology 2022, 9, 39. https://doi.org/10.3390/hydrology9020039
Samarasinghe JT, Basnayaka V, Gunathilake MB, Azamathulla HM, Rathnayake U. Comparing Combined 1D/2D and 2D Hydraulic Simulations Using High-Resolution Topographic Data: Examples from Sri Lanka—Lower Kelani River Basin. Hydrology. 2022; 9(2):39. https://doi.org/10.3390/hydrology9020039
Chicago/Turabian StyleSamarasinghe, Jayanga T., Vindhya Basnayaka, Miyuru B. Gunathilake, Hazi M. Azamathulla, and Upaka Rathnayake. 2022. "Comparing Combined 1D/2D and 2D Hydraulic Simulations Using High-Resolution Topographic Data: Examples from Sri Lanka—Lower Kelani River Basin" Hydrology 9, no. 2: 39. https://doi.org/10.3390/hydrology9020039
APA StyleSamarasinghe, J. T., Basnayaka, V., Gunathilake, M. B., Azamathulla, H. M., & Rathnayake, U. (2022). Comparing Combined 1D/2D and 2D Hydraulic Simulations Using High-Resolution Topographic Data: Examples from Sri Lanka—Lower Kelani River Basin. Hydrology, 9(2), 39. https://doi.org/10.3390/hydrology9020039