Merging Real-Time Channel Sensor Networks with Continental-Scale Hydrologic Models: A Data Assimilation Approach for Improving Accuracy in Flood Depth Predictions


Abstract
:1. Introduction
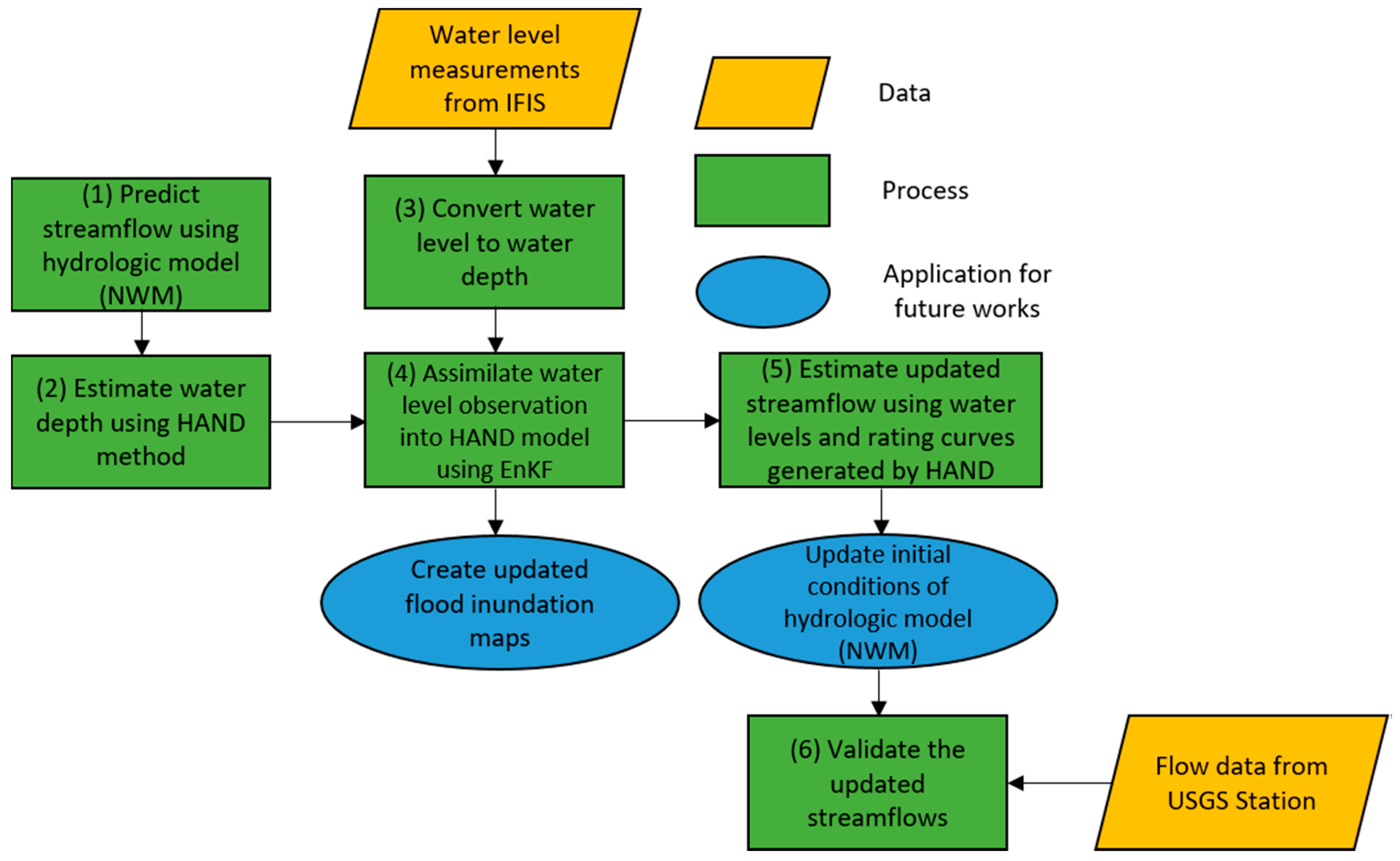
- (1)
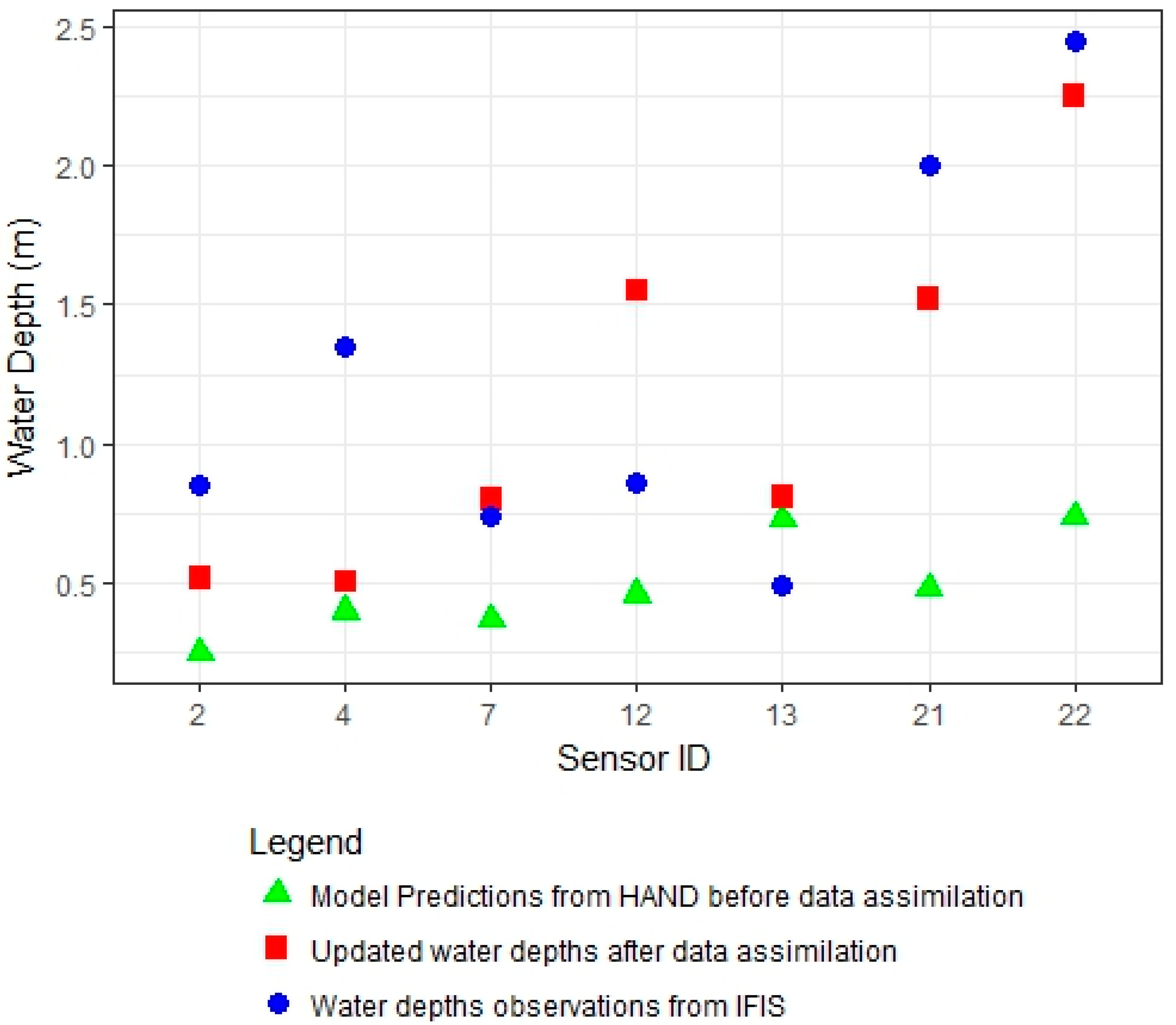
- Assimilating water depth measurements to dynamically update water level predictions.
- (2)
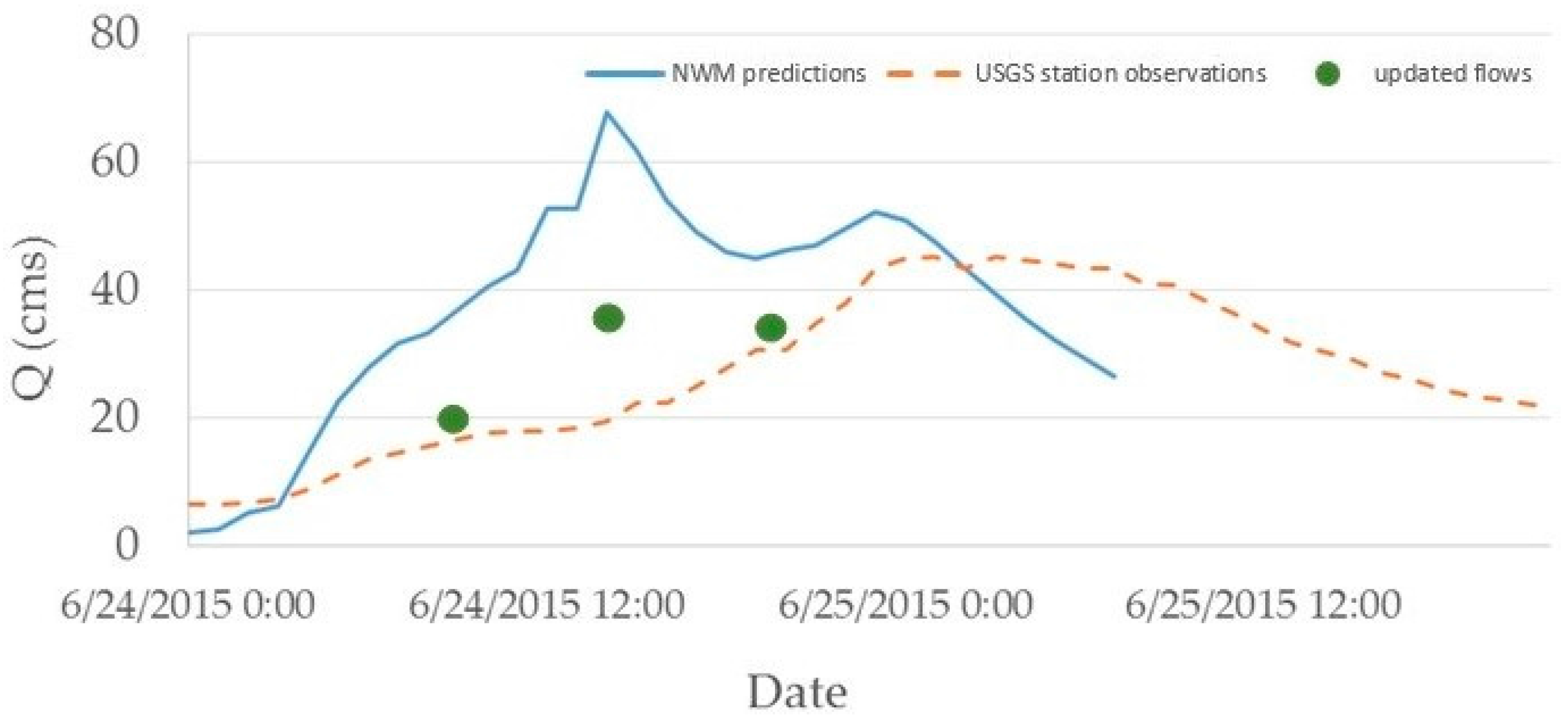
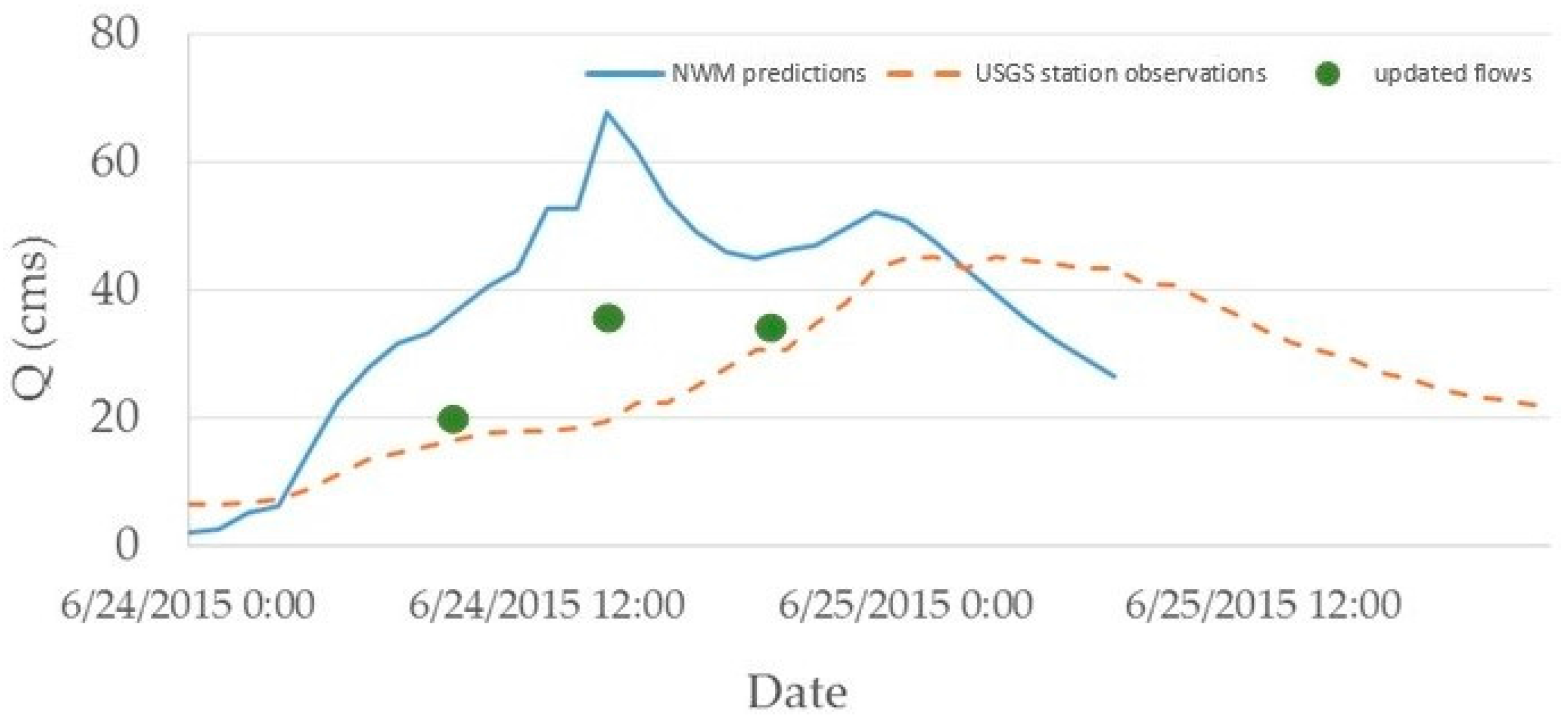
- Improving streamflow predicted by the National Water Model (NWM) using updated water levels.
- (3)
- Proposing a scope to update continental-scale hydrologic models (e.g., NWM).
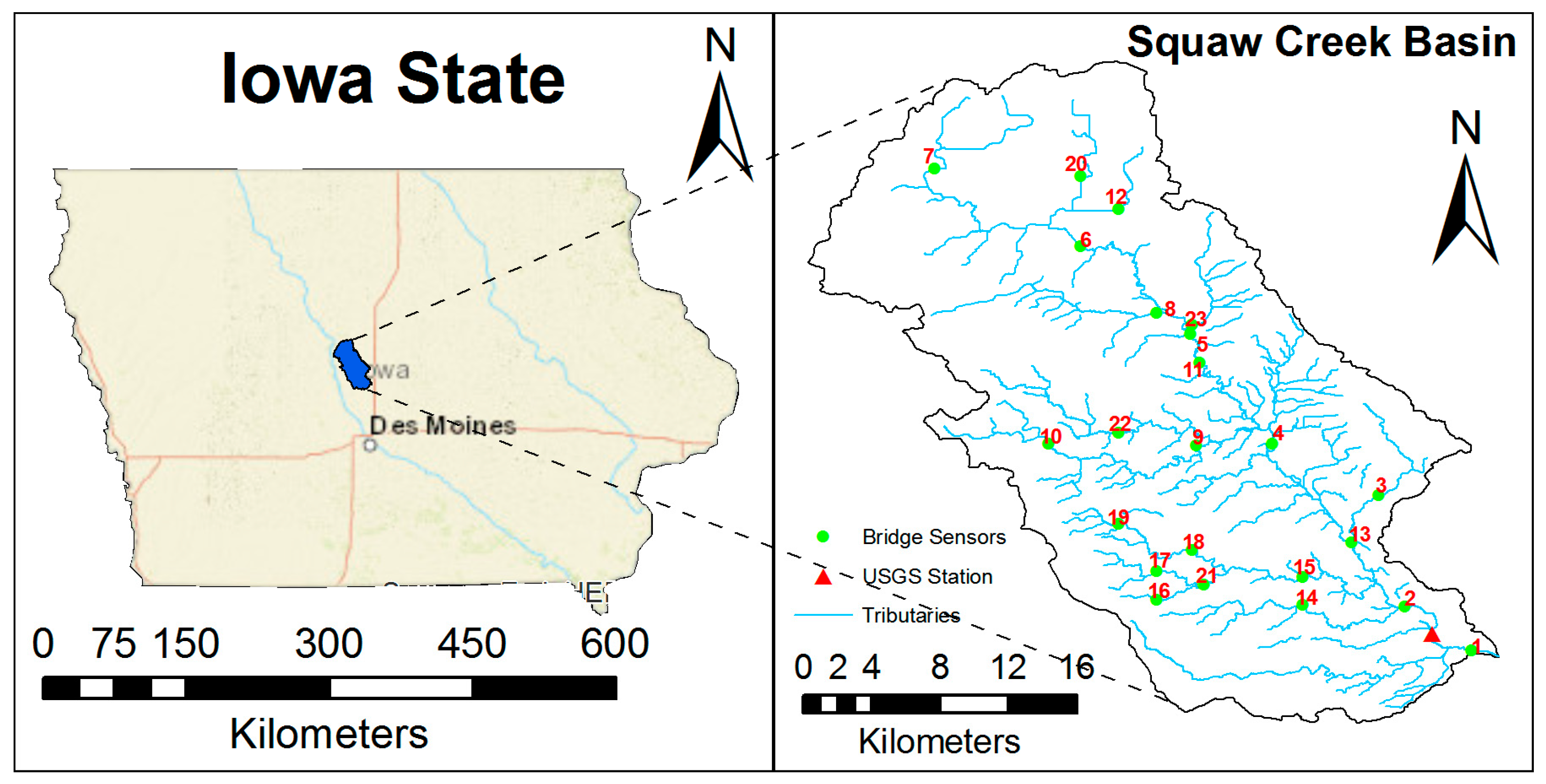
2. Study Area and Methodology
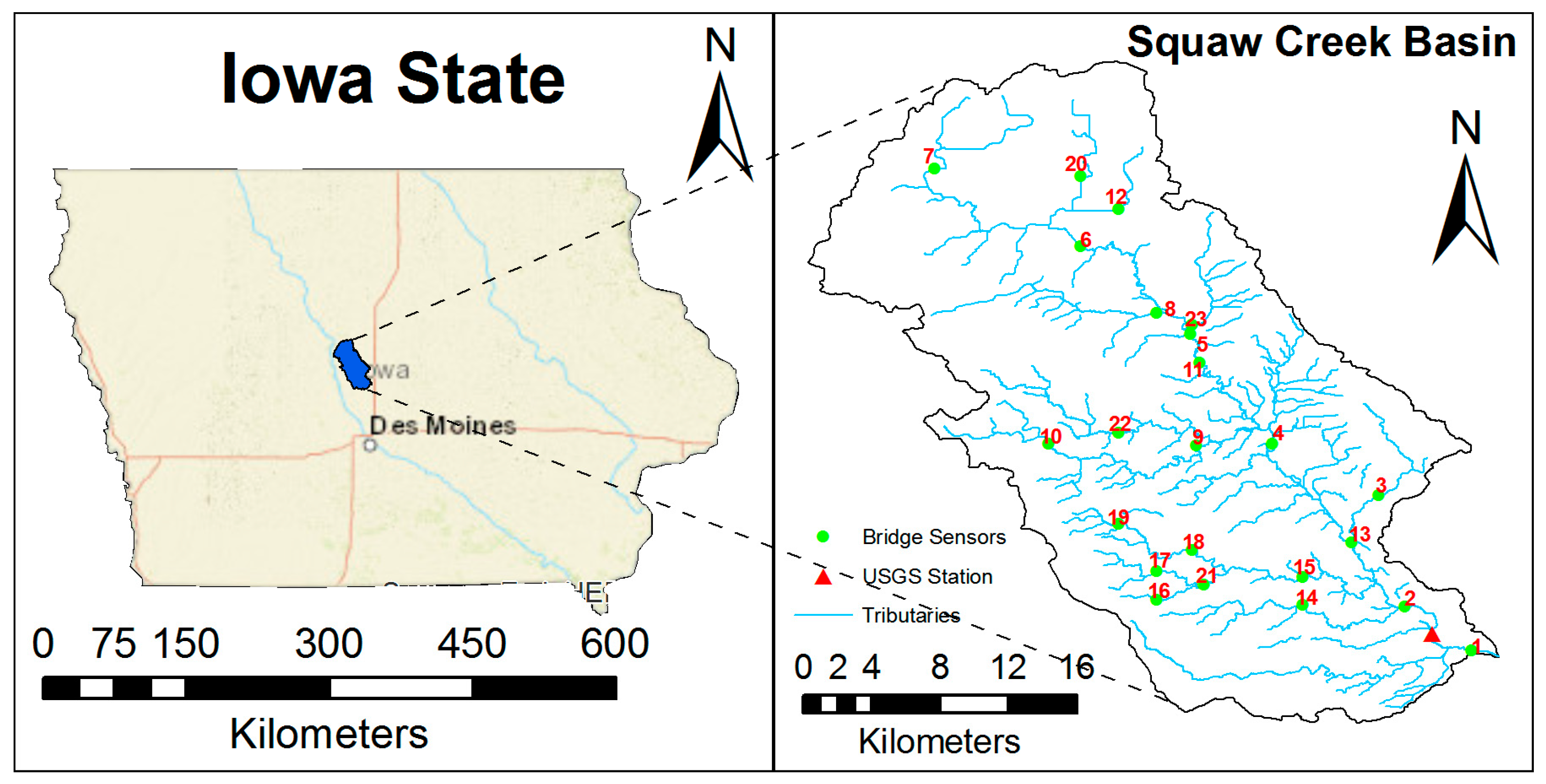
2.1. Study Area Characteristics and Data Collection
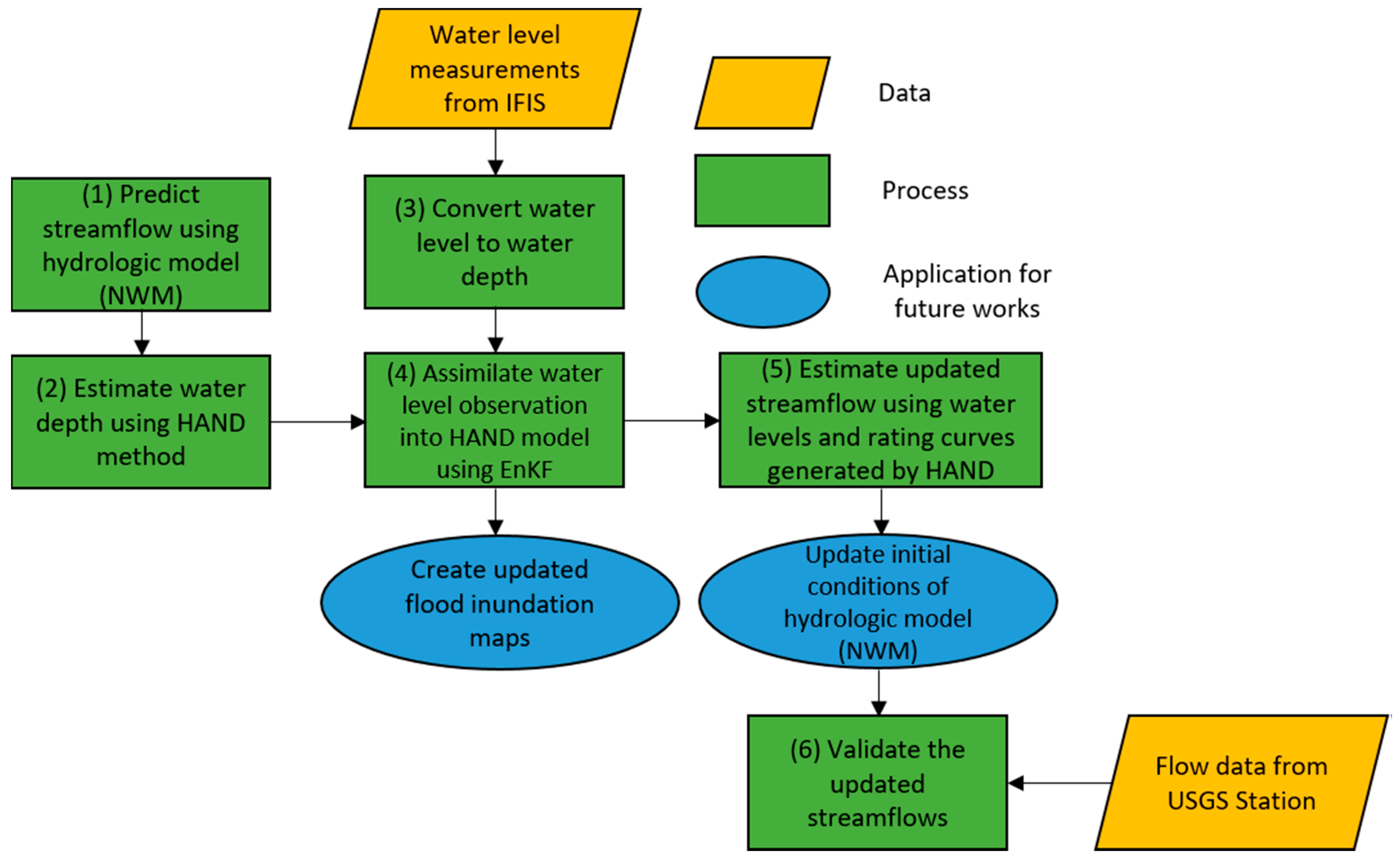
2.2. Proposed Approach
2.3. National Water Model
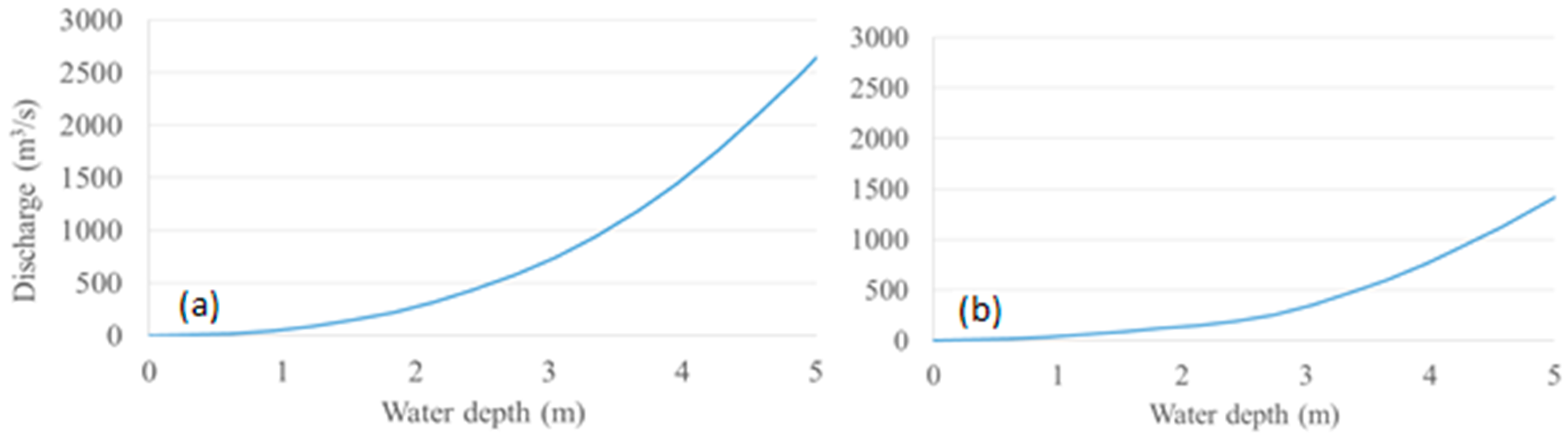
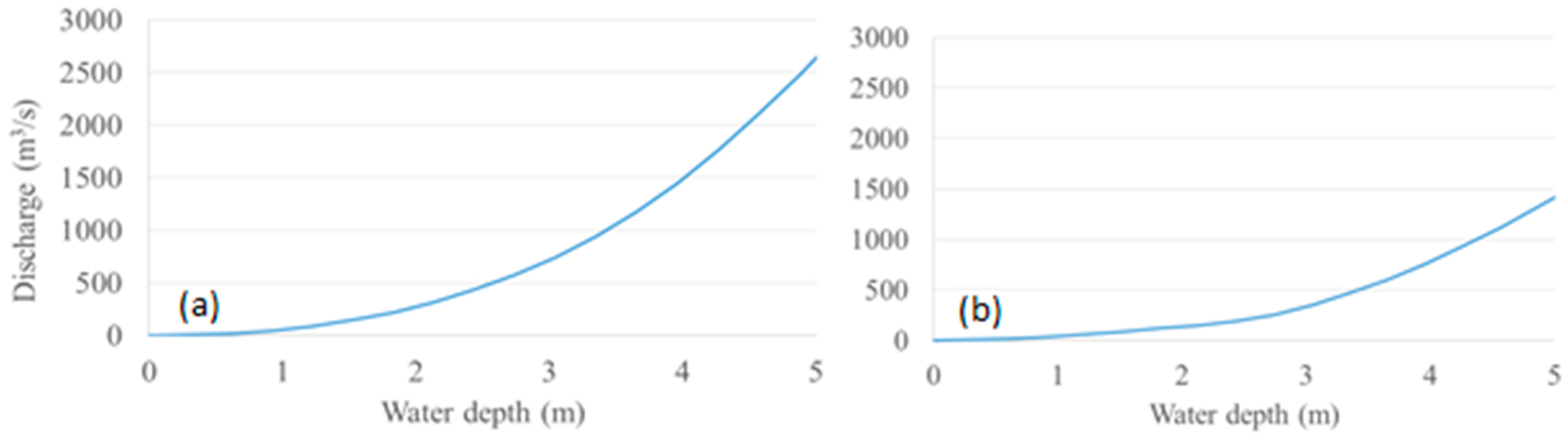
2.4. The HAND Method
2.5. Ensemble Kalman Filter
2.5.1. Undersampling
2.5.2. Covariance Inflation
2.5.3. Covariance Localization
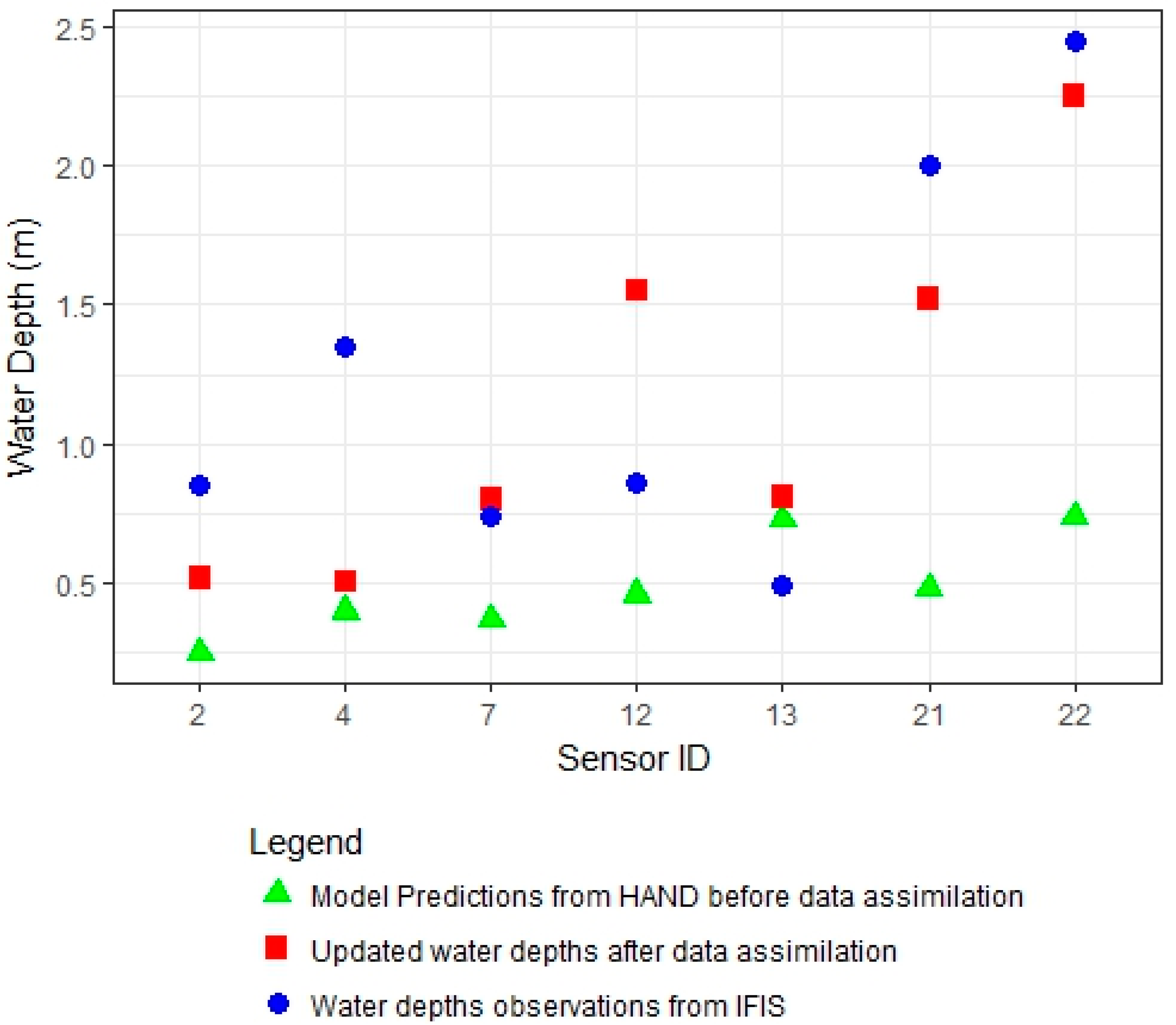
3. Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Saksena, S.; Merwade, V. Incorporating the effect of DEM resolution and accuracy for improved flood inundation mapping. J. Hydrol. 2015, 530, 180–194. [Google Scholar] [CrossRef]
- Zarekarizi, M.; Rana, A.; Moradkhani, H. Precipitation extremes and their relation to climatic indices in the Pacific Northwest USA. Clim. Dyn. 2017. [Google Scholar] [CrossRef]
- Omranian, E.; Sharif, H.O. Evaluation of the Global Precipitation Measurement (GPM) Satellite Rainfall Products Over the Lower Colorado River Basin, Texas. J. Am. Water Resour. Assoc. 2018. [Google Scholar] [CrossRef]
- Follum, M.L.; Tavakoly, A.A.; Niemann, J.D.; Snow, A.D. AutoRAPID: A Model for Prompt Streamflow Estimation and Flood Inundation Mapping over Regional to Continental Extents. JAWRA J. Am. Water Resour. Assoc. 2017, 53, 280–299. [Google Scholar] [CrossRef]
- Afshari, S.; Omranian, E.; Feng, D. Relative Sensitivity of Flood Inundation Extent by Different Physical and Semi-Empirical Models; CUAHSI Technical Report No. 13; Consortium of Universities for the Advancement of Hydrologic Science, Inc.: Cambridge, MA, USA, 2016; pp. 19–24. [Google Scholar]
- Jafarzadegan, K.; Merwade, V. A DEM-based approach for large-scale floodplain mapping in ungauged watersheds. J. Hydrol. 2017, 550, 650–662. [Google Scholar] [CrossRef]
- McHugh, P.A.; Saunders, W.C.; Bouwes, N.; Wall, C.E.; Bangen, S.; Wheaton, J.M.; Nahorniak, M.; Ruzycki, J.R.; Tattam, I.A.; Jordan, C.E. Linking models across scales to assess the viability and restoration potential of a threatened population of steelhead (Oncorhynchus mykiss) in the Middle Fork John Day River, Oregon, USA. Ecol. Model. 2017, 355, 24–38. [Google Scholar] [CrossRef]
- Hamidi, S.A.; Hosseiny, H.; Ekhtari, N.; Khazaei, B. Using MODIS remote sensing data for mapping the spatio-temporal variability of water quality and river turbid plume. J. Coast. Conserv. 2017, 21, 939–950. [Google Scholar] [CrossRef]
- Durand, M.; Andreadis, K.M.; Alsdorf, D.E.; Lettenmaier, D.P.; Moller, D.; Wilson, M. Estimation of bathymetric depth and slope from data assimilation of swath altimetry into a hydrodynamic model. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- Evensen, G. Data Assimilation: The Ensemble Kalman Filter; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Moradkhani, H. Hydrologic Remote Sensing and Land Surface Data Assimilation. Sensors 2008, 8. [Google Scholar] [CrossRef] [PubMed]
- Yan, H.; Moradkhani, H.; Zarekarizi, M. A probabilistic drought forecasting framework: A combined dynamical and statistical approach. J. Hydrol. 2017, 548, 291–304. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Maybeck, P.S. Stochastic Models, Estimation and Control; Academic Press: Cambridge, MA, USA, 1979. [Google Scholar]
- Krener, A.; Duarte, A. A Hybrid Computational Approach to Nonlinear Estimation. In Proceedings of the Decision and Control, Kobe, Japan, 13 December 1996. [Google Scholar]
- Evensen, G. Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics. J. Geophys. Res. 1994, 99, 10143–10162. [Google Scholar] [CrossRef]
- Crow, W.; Wood, E. The assimilation of remotely sensed soil brightness temperature imagery into a land surface model using Ensemble Kalman filtering: A case study based on ESTAR measurements during SGP97. Adv. Water Resour. 2003, 26, 137–149. [Google Scholar] [CrossRef]
- Noh Seong, J.; Tachikawa, Y.; Shiiba, M.; Kim, S. Ensemble Kalman Filtering and Particle Filtering in a Lag-Time Window for Short-Term Streamflow Forecasting with a Distributed Hydrologic Model. J. Hydrol. Eng. 2013, 18, 1684–1696. [Google Scholar] [CrossRef]
- Miller, R.N.; Cane, M.A. A Kalman Filter Analysis of Sea Level Height in the Tropical Pacific. J. Phys. Oceanogr. 1989, 19, 773–790. [Google Scholar] [CrossRef]
- Schilling, K.E.; Thompson, C.A. Walnut creek watershed monitoring project, iowa monitoring water quality in response to Prairie restoration. JAWRA J. Am. Water Resour. Assoc. 2000, 36, 1101–1114. [Google Scholar] [CrossRef]
- Zogg, J. The Top Five Iowa Floods; National Weather Service WFO: Des Monies, IA, USA, 2014. [Google Scholar]
- Liu, Y.; Maidment, D.; Tarboton, D.; Zheng, X.; Yıldırım, A.; Sazib, N.; Wang, S. A CyberGIS Approach to Generating High-Resolution Height Above Nearest Drainage (HAND) Raster for National Flood Mapping. In Proceedings of the Third International Conference on CyberGIS and Geospatial Data Science, Urbana, IL, USA, 26–28 July 2016. [Google Scholar]
- National Oceanic and Atmospheric Administration (NOAA). NOAA Launches America’s First National Water Forecast Model; National Oceanic and Atmospheric Administration: Silver Spring, MD, USA, 2016.
- Souffront Alcantara, M.A.; Crawley, S.; Stealey, M.J.; Nelson, E.J.; Ames, D.P.; Jones, N.L. Open Water Data Solutions for Accessing the National Water Model. Open Water J. 2017, 4, 1–14. [Google Scholar]
- Afshari, S.; Tavakoly, A.A.; Rajib, M.A.; Zheng, X.; Follum, M.L.; Omranian, E.; Fekete, B.M. Comparison of new generation low-complexity flood inundation mapping tools with a hydrodynamic model. J. Hydrol. 2018, 556, 539–556. [Google Scholar] [CrossRef]
- Nobre, A.D.; Cuartas, L.A.; Hodnett, M.; Rennó, C.D.; Rodrigues, G.; Silveira, A.; Waterloo, M.; Saleska, S. Height Above the Nearest Drainage—A hydrologically relevant new terrain model. J. Hydrol. 2011, 404, 13–29. [Google Scholar] [CrossRef]
- Rennó, C.D.; Nobre, A.D.; Cuartas, L.A.; Soares, J.V.; Hodnett, M.G.; Tomasella, J.; Waterloo, M.J. HAND, a new terrain descriptor using SRTM-DEM: Mapping terra-firme rainforest environments in Amazonia. Remote Sens. Environ. 2008, 112, 3469–3481. [Google Scholar] [CrossRef]
- Fan, Y.; Liu, Y.; Wang, S.; Tarboton, D.; Yildirim, A.; Wilkins-Diehr, N. Accelerating TauDEM as a Scalable Hydrological Terrain Analysis Service on XSEDE. In Proceedings of the 2014 Annual Conference on Extreme Science and Engineering Discovery Environment, Atlanta, GA, USA, 13–18 July 2014; pp. 1–2. [Google Scholar]
- Burgers, G.; Jan van Leeuwen, P.; Evensen, G. Analysis Scheme in the Ensemble Kalman Filter. Mon. Weather Rev. 1998, 126, 1719–1724. [Google Scholar] [CrossRef]
- Petrie, R.E. Localization in the Ensemble Kalman Filter; University of Reading: Reading, UK, 2008. [Google Scholar]
- Hamill, T.M.; Whitaker, J.S.; Snyder, C. Distance-Dependent Filtering of Background Error Covariance Estimates in an Ensemble Kalman Filter. Mon. Weather Rev. 2001, 129, 2776–2790. [Google Scholar] [CrossRef]
- Anderson, J.L.; Anderson, S.L. A Monte Carlo Implementation of the Nonlinear Filtering Problem to Produce Ensemble Assimilations and Forecasts. Mon. Weather Rev. 1999, 127, 2741–2758. [Google Scholar] [CrossRef]
- Wang, X.; Bishop, C.H. A Comparison of Breeding and Ensemble Transform Kalman Filter Ensemble Forecast Schemes. J. Atmos. Sci. 2003, 60, 1140–1158. [Google Scholar] [CrossRef]
- Wu, G.; Zheng, X.; Wang, L.; Zhang, S.; Liang, X.; Li, Y. A new structure for error covariance matrices and their adaptive estimation in EnKF assimilation. Q. J. R. Meteorol. Soc. 2013, 139, 795–804. [Google Scholar] [CrossRef]
- Houtekamer, P.L.; Mitchell, H.L. Data Assimilation Using an Ensemble Kalman Filter Technique. Mon. Weather Rev. 1998, 126, 796–811. [Google Scholar] [CrossRef]
- Gaspari, G.; Cohn, S.E. Construction of correlation functions in two and three dimensions. Q. J. R. Meteorol. Soc. 1999, 125, 723–757. [Google Scholar] [CrossRef]
- Javaheri, A.; Babbar-Sebens, M.; Miller, R.N. From skin to bulk: An adjustment technique for assimilation of satellite-derived temperature observations in numerical models of small inland water bodies. Adv. Water Resour. 2016, 92, 284–298. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forecast Product | Forecast Latency | Frequency | Forecast Duration |
|---|---|---|---|
| Analysis and assimilation | 1 h | Hourly | 0–3 h |
| Short range forecast | 1 h | Hourly | 0–15 h |
| Medium range forecast | 3 h | Daily | 0–10 days |
| Long range forecast | 6 h | 4× Daily | 0–30 days |
| Water Depth (m) | |||
|---|---|---|---|
| Observation | Before Data Assimilation | After Data Assimilation | |
| Training Tributaries | 0.85 | 0.24 | 0.55 |
| 1.34 | 0.37 | 0.52 | |
| 0.72 | 0.36 | 0.81 | |
| 0.85 | 0.44 | 1.27 | |
| 0.48 | 0.69 | 0.84 | |
| 2.00 | 0.49 | 1.25 | |
| 2.39 | 0.71 | 2.26 | |
| Testing Tributaries | 1.30 | 2.01 | 1.67 |
| 0.32 | 1.01 | 0.71 | |
| 1.50 | 0.30 | 0.81 | |
| 1.86 | 1.01 | 1.99 | |
| Overall RMSE (m) | 0.95 | 0.47 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Javaheri, A.; Nabatian, M.; Omranian, E.; Babbar-Sebens, M.; Noh, S.J. Merging Real-Time Channel Sensor Networks with Continental-Scale Hydrologic Models: A Data Assimilation Approach for Improving Accuracy in Flood Depth Predictions. Hydrology 2018, 5, 9. https://doi.org/10.3390/hydrology5010009
Javaheri A, Nabatian M, Omranian E, Babbar-Sebens M, Noh SJ. Merging Real-Time Channel Sensor Networks with Continental-Scale Hydrologic Models: A Data Assimilation Approach for Improving Accuracy in Flood Depth Predictions. Hydrology. 2018; 5(1):9. https://doi.org/10.3390/hydrology5010009
Chicago/Turabian StyleJavaheri, Amir, Mohammad Nabatian, Ehsan Omranian, Meghna Babbar-Sebens, and Seong Jin Noh. 2018. "Merging Real-Time Channel Sensor Networks with Continental-Scale Hydrologic Models: A Data Assimilation Approach for Improving Accuracy in Flood Depth Predictions" Hydrology 5, no. 1: 9. https://doi.org/10.3390/hydrology5010009
APA StyleJavaheri, A., Nabatian, M., Omranian, E., Babbar-Sebens, M., & Noh, S. J. (2018). Merging Real-Time Channel Sensor Networks with Continental-Scale Hydrologic Models: A Data Assimilation Approach for Improving Accuracy in Flood Depth Predictions. Hydrology, 5(1), 9. https://doi.org/10.3390/hydrology5010009