1. Introduction
The field of chemical and biochemical engineering is plagued with various control problems, one of which is the primary focus of current work: the regulation of unstable open-loop processes. For instance, when irreversible exothermic reactions occur, many continuously operating chemical reactors become unstable in open-loop operation due to runaway reactions. This can occur if the reaction heat is particularly high and the heat exchanger cannot remove all the produced heat. Unfortunately, conventional control techniques are not always sufficient for dealing with this process. If this is the case, the control loops are not robust enough to handle the existing uncertainties, such as modeling errors, unmodeled process dynamics, or noise in signals. In addition, some typical performance specifications for self-regulating processes cannot be employed in non-self-regulating processes [
1]. These facts require the development of mechanisms for addressing open-loop unstable processes, which are characterized by the mentioned issues [
2]. In addition, many chemical processing units are inherently open-loop unstable. Particularly, nonlinear chemical processes exhibit multiple operating states, and some of them can be unstable. For example, some continuous-time stirred exothermic tank reactors, reactive distillation columns, polymerization processes, and some biochemical processes can have unstable poles. These processes must operate around an unstable steady state to achieve better productivity. While this high productivity is due to better driving forces for the heat or mass transfer involved, operating in an unstable steady state can pose hazards such as over-temperature and over-pressure, which can affect the construction materials of the equipment, degrade catalysts, and cause undesired phase changes, among others. Furthermore, if a time delay, commonly an inherent part of many industrial processes, is added to the unstable process, the control becomes more complicated [
1].
A common robust control technique in control systems is the sliding mode control (SMC) methodology [
3]. The traditional drawbacks of sliding and sampled sliding mode control policies are due to the “bang-bang” nature of the input signals, leading to “chattering” of output and state variable response signals [
3,
4,
5]. In that sense, it is crucial to reduce the chattering phenomenon in SMC to mitigate the effect of high-frequency oscillations on the final control element. Consequently, some techniques within an SMC strategy address the elevated control activity caused by the unwanted switching of the system output. Furthermore, many strategies extend the SMC approach to other control techniques, such as Higher-Order SMC (HOSMC), Terminal SMC (TSMC), and Dynamic Sliding Mode Control (DSMC), looking for reducing or eliminating the chattering effects [
3,
4,
6,
7,
8,
9,
10,
11,
12,
13].
Dynamic Sliding Mode Control (DSMC) incorporates additional systems for dynamic compensation into a sliding surface [
4,
9], demonstrating the suitability of this control strategy for enhancing performance and stability [
4]. DSMC preserves the fundamental robustness characteristics of sliding mode control techniques while producing smoothed-out controller output, thus eliminating the need for smoothing functions such as sigmoid, saturation, and hyperbolic tangent functions to replace the signum function. Furthermore, the terms of the dynamic in the control law allow that when the control signal is integrated for its application, it is smoothed against rapid oscillations of the system output for attaining the sliding surface, degrading the effects of chattering. [
4,
8,
9,
12,
13]. The attributes of DSMC are especially important in chemical process control tasks where discontinuities in actuator behavior are not desirable and where fast oscillations of the controlled variable are not usually permitted due to their effect on the quality of the final product. In particular, the DSMC approach has been used in chemical processes [
4,
12,
13], achieving minimum chattering effects while maintaining robust performance under extreme conditions of disturbances and uncertainties.
DSMC has been employed in open-loop self-regulating systems [
4,
13,
14,
15,
16], and some works report the application of SMC to open-loop unstable systems [
17,
18,
19,
20,
21,
22,
23]. However, to the author’s knowledge, there are only a small number of reported studies on the application of DSMC to open-loop non-self-regulating systems processes [
24,
25]. Controlling open-loop non-self-regulating processes has significant challenges, even more so if they have a time delay, which further complicates the control. In this study, DSMC is applied to open-loop unstable systems, and its design and simulation are presented. Conventional SMCs can achieve DSMC based on the ideas of internal model control (IMC) to achieve the concept of a fixed structure controller but applied to a nonlinear system [
26]. Moreover, IMC reduces the adverse effects of time delay because it is closely related to the Smith Predictor concept, which improves performance until the effects of time delay are negligible [
27].
The design of DSMCs for unstable systems starts with identifying the unstable plant. For example, a first-order delayed unstable process (FODUP) can be used for this purpose. Therefore, identifying the unstable system is essential for designing and tuning the control [
12]. The identification process involves closing the control loop with a P/PI/PID controller and changing the setpoint. By analyzing the closed-loop system response and using analytical formulas for identification proposed by Padma and Chidambaram using a P controller [
26] and by Ananth and Chidambaram using a PI/PID controller [
28], the model gain, time delay, and time constant of an unstable system can be determined.
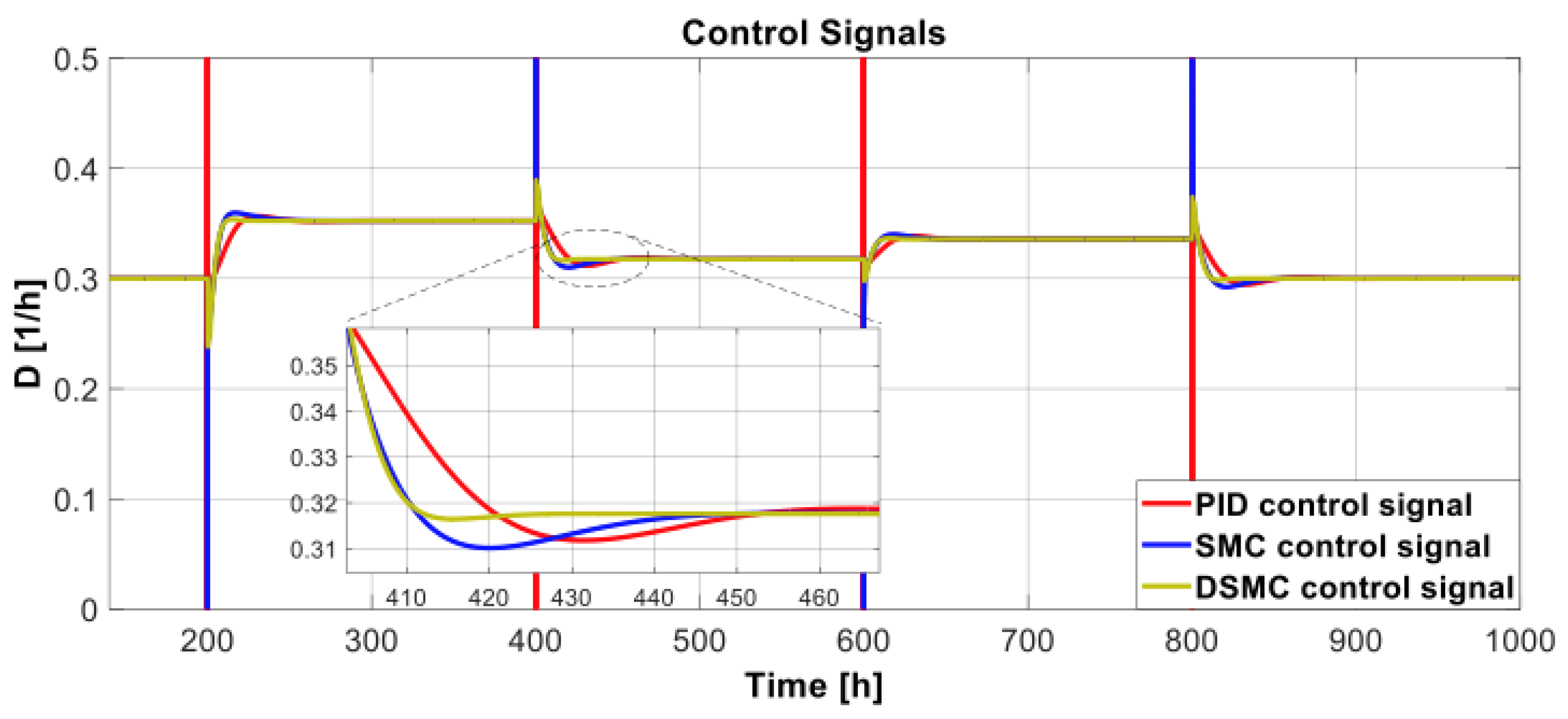
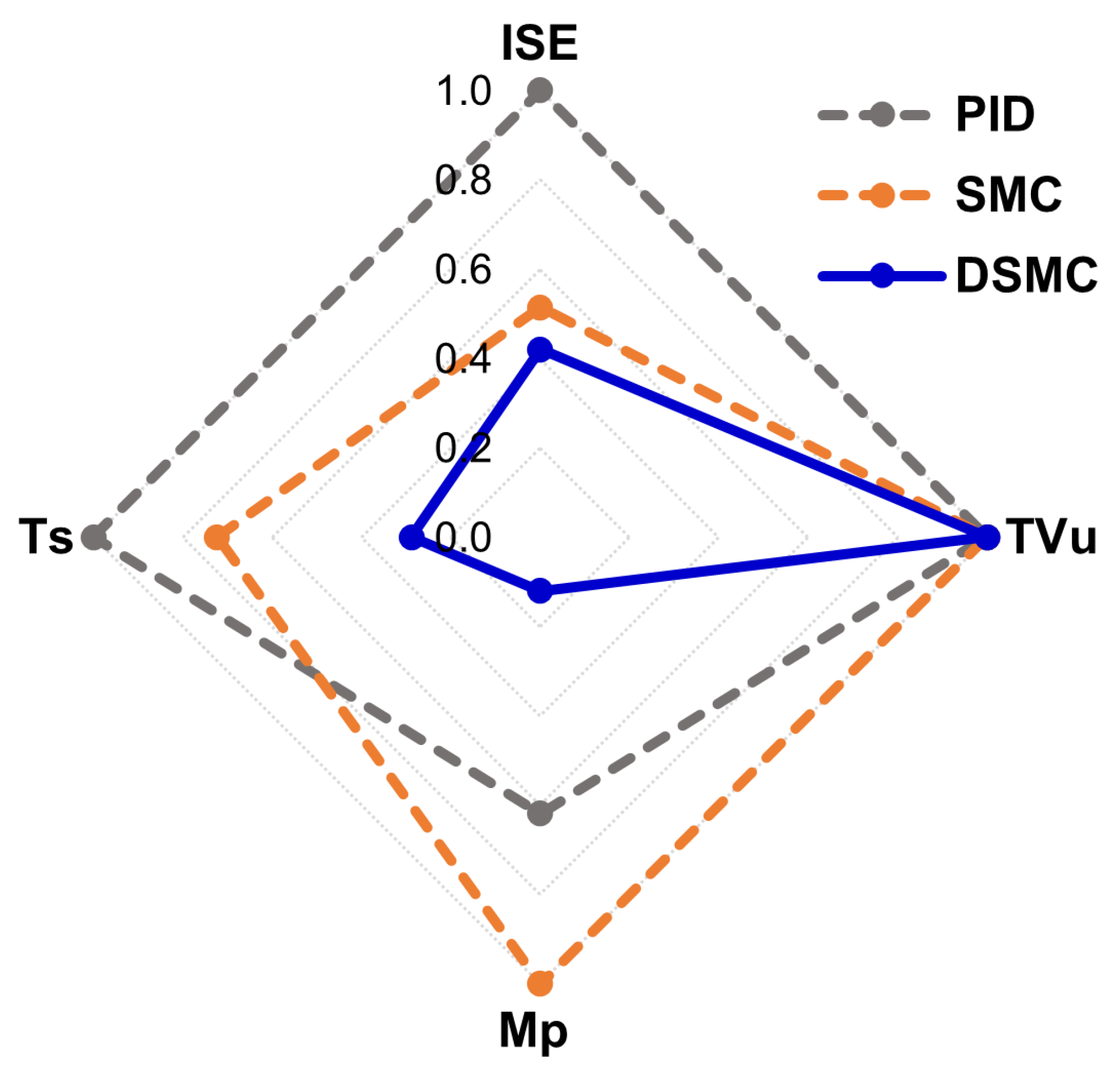
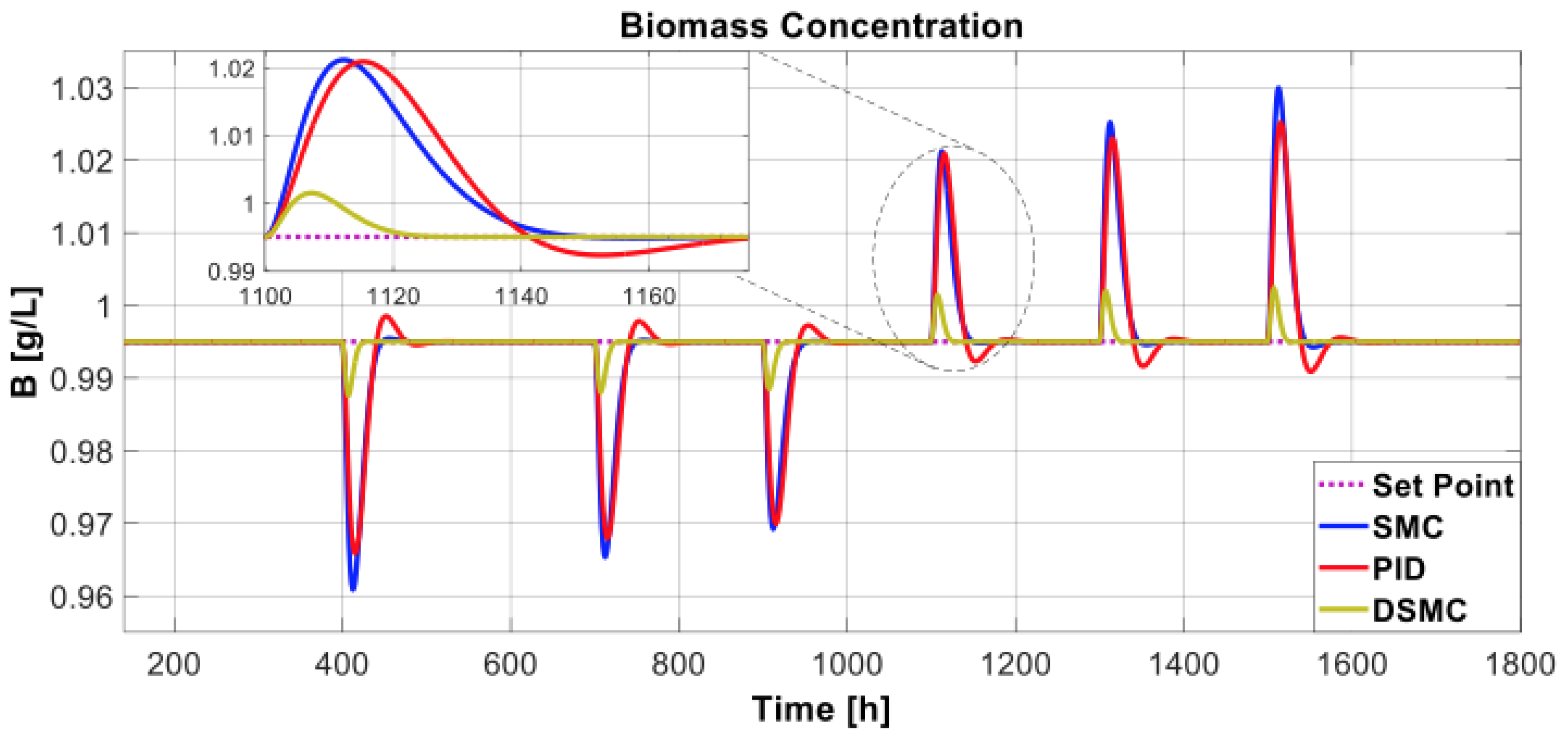
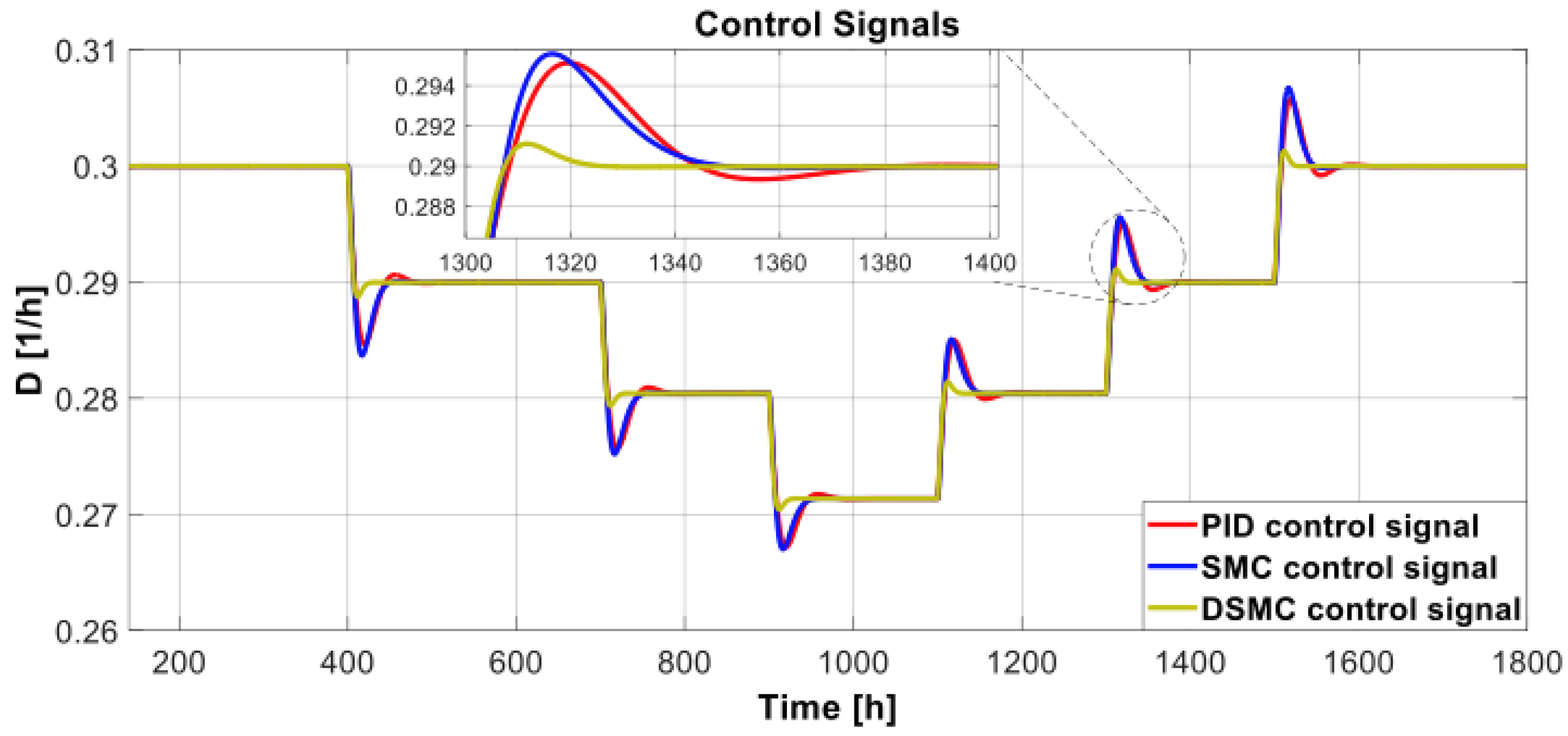
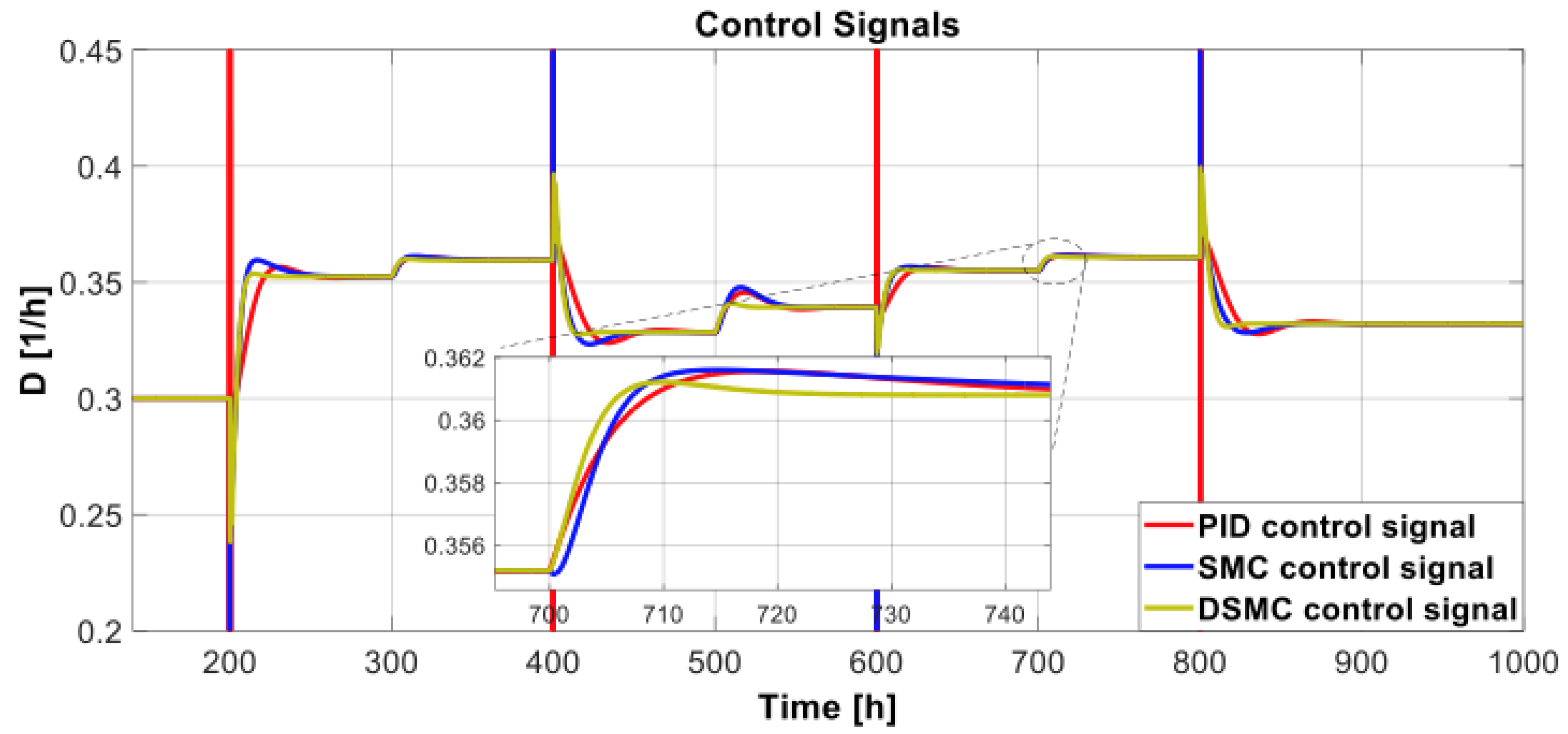
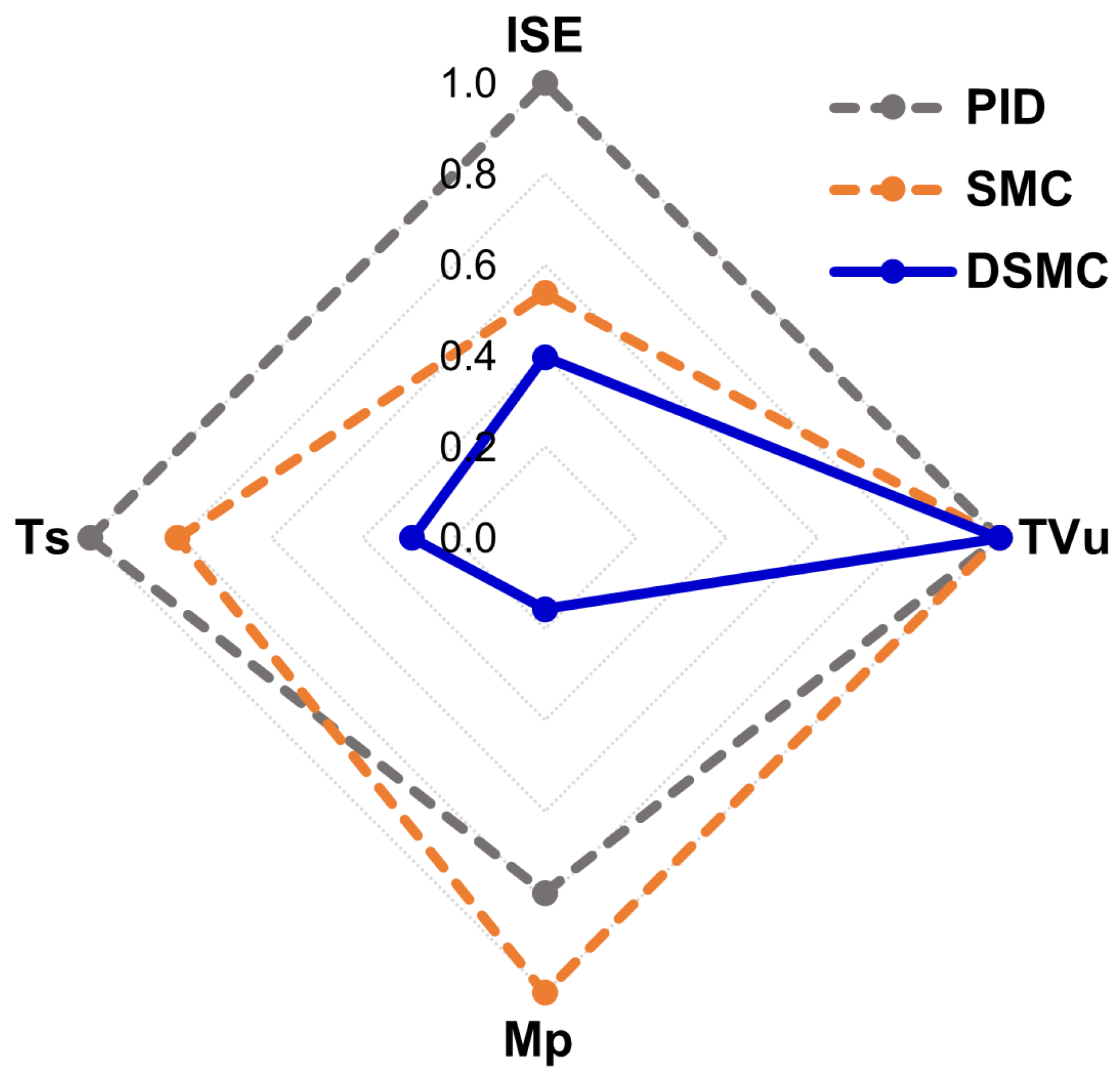
Based on the mentioned concepts, herein, by simulation, we designed and tested a DSMC for unstable open-loop systems with time delay, employing the ideas of sliding modes and internal model structures. The obtained controller has an internal P/PD controller to provide systems with disturbance rejection. In addition, the DSMC corrects modeling errors, providing better performance and increasing the lifetime of the final control element. The proposed DSMC was applied to a nonlinear bioreactor operating at an unstable point [
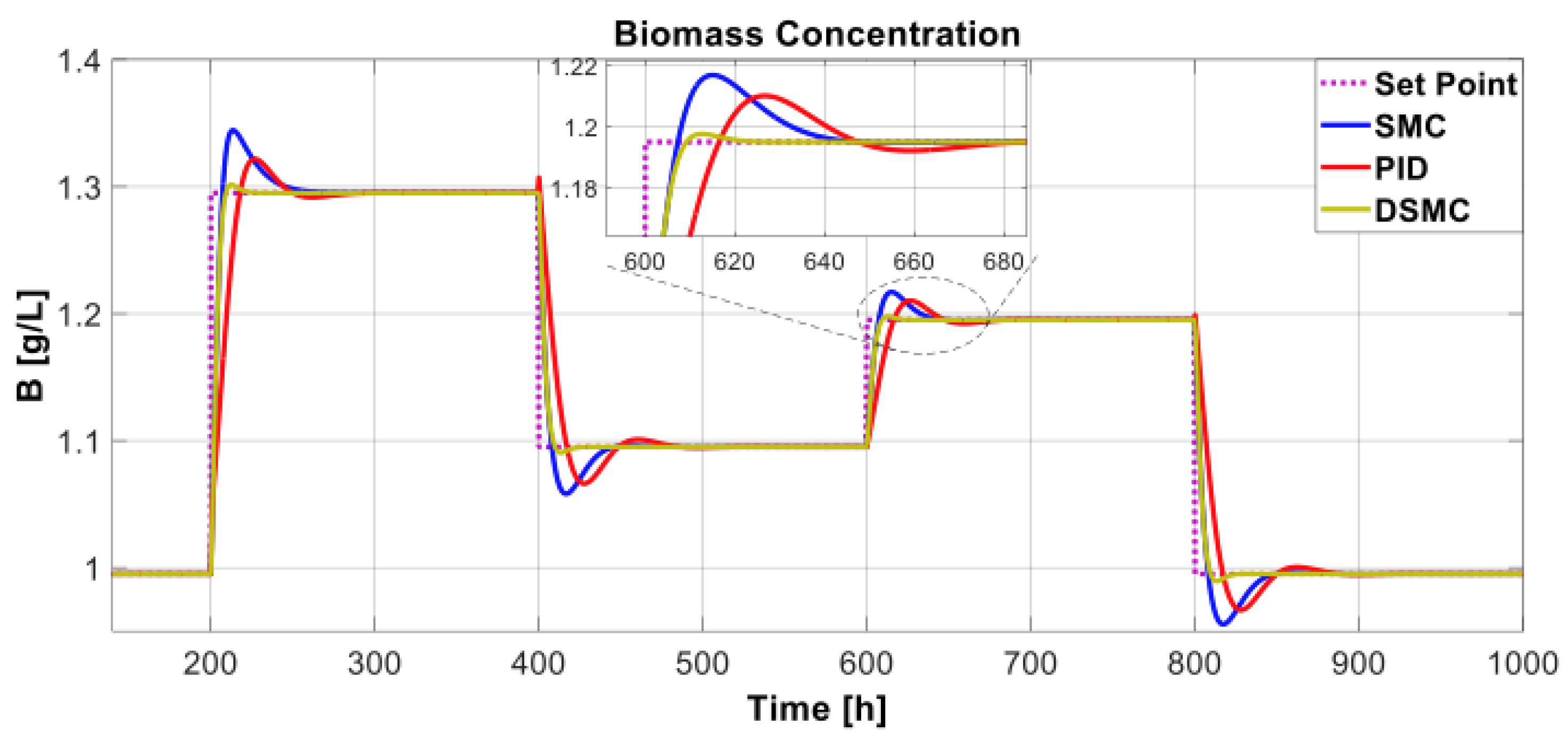
18] and was compared with the SMC presented in [
17] and the PID developed in [
29]. The performance analysis of the control schemes was evaluated based on various indices and transient characteristics, including the integral square error (ISE), the total variation of control effort (TVu), the maximum overshoot (Mp), and the settling time (ts).
The main novelties and contributions of this paper are as follows: (i) a controller for chemical processes with an unstable open-loop response and time delay was designed and implemented by combining the concepts of IMC and SMC; (ii) the controller was developed based on a reduced-order model of the process, specifically the first-order delayed unstable process (FODUP), avoiding a complex model, resulting in a controller of fixed structure easy to implement in any computer system; (iii) the DSMC design approach has a smooth transition, and enhances tracking and disturbance rejection compared with SMC and PID; and (iv) to the best of the authors’ knowledge, this approach has not been previously employed in open-loop unstable nonlinear chemical processes.
The rest of the paper is organized as follows:
Section 2 presents, in brief, the basic concepts of unstable systems, IMCs, and SMC;
Section 3 presents an unstable system using a PI/PID controller; and
Section 4 describes the nonlinear system for testing the controller and discusses their results. Finally,
Section 5 presents the conclusions of the study.
3. Identification Procedure for Unstable Systems Using PI/PID Control
This section describes a method for identifying the characteristic parameters of a model for designing the controller using a single experiment on a closed loop system with a step-change in the set-point of the PI or PID controller. This method was first proposed by Yuwana and Seborg [
33], extended by Kavdia and Chidambaram [
34], and modified by Ananth and Chidambaram [
28]. The details of the procedure can be found in [
28,
34]. It should be noted that open-loop identification methods are not suitable for unstable systems.
In most previous studies, it was assumed that the dynamics of an open-loop unstable process with a positive pole and dead time could be described by a transfer function as follows:
where
K is the gain,
is the time constant, and
is the dead time.
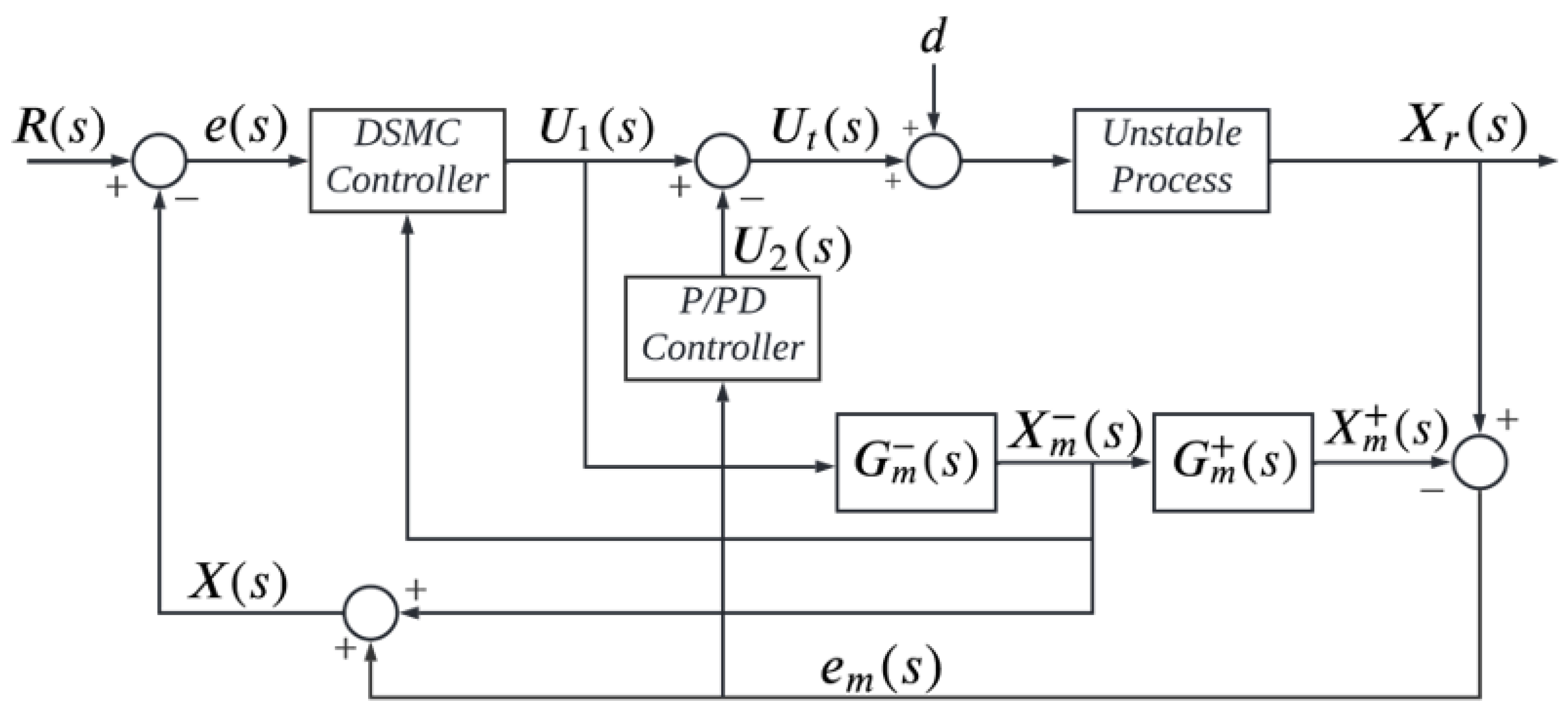
Figure 1 shows the block diagram employed herein, with the required PI/PID controller in a closed-loop [
28].
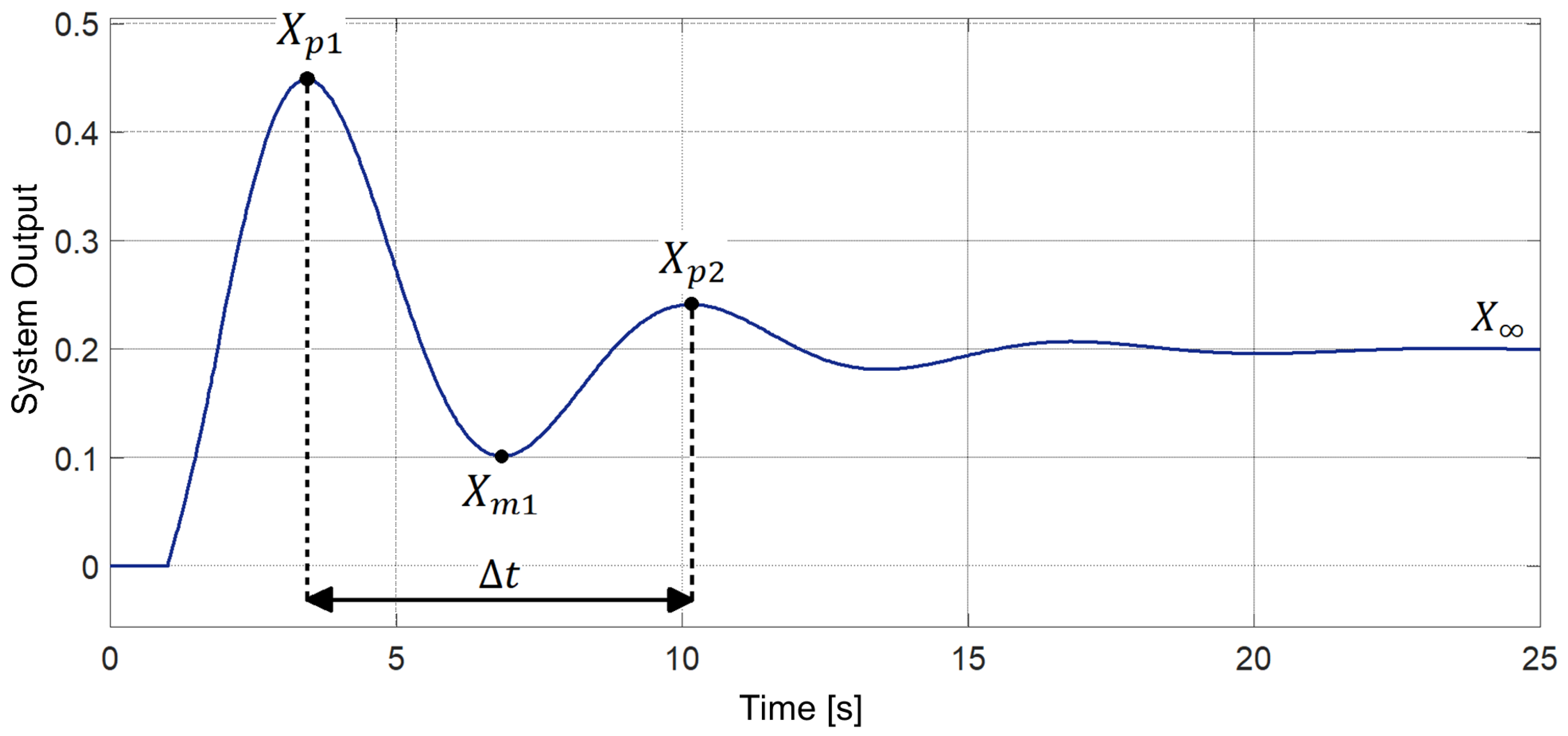
The excitation of the system is a step-input value. The controller constant values are varied until the system response is similar to or equal to that shown in
Figure 2.
The response in
Figure 2 provides the parameters for determining the FODUP model of the unstable system, which include the following:
, the first peak of the response;
, the first minimum value of the response;
, the second peak of the response;
, the steady-state response value; and
, the time difference between
and
. Based on the values of these parameters and the PID constants (
, and
), the first-order model values are determined from the equations proposed in [
28], as shown:
where:
Notably, the time delay
is obtained from the initial part of the response to the step input. Besides, in a case where the controller is a PI, the derivative constant
is 0. In summary, the identification method uses the closed-loop response shown in
Figure 2 to obtain the first-order open-loop unstable model using the equations proposed in [
28].
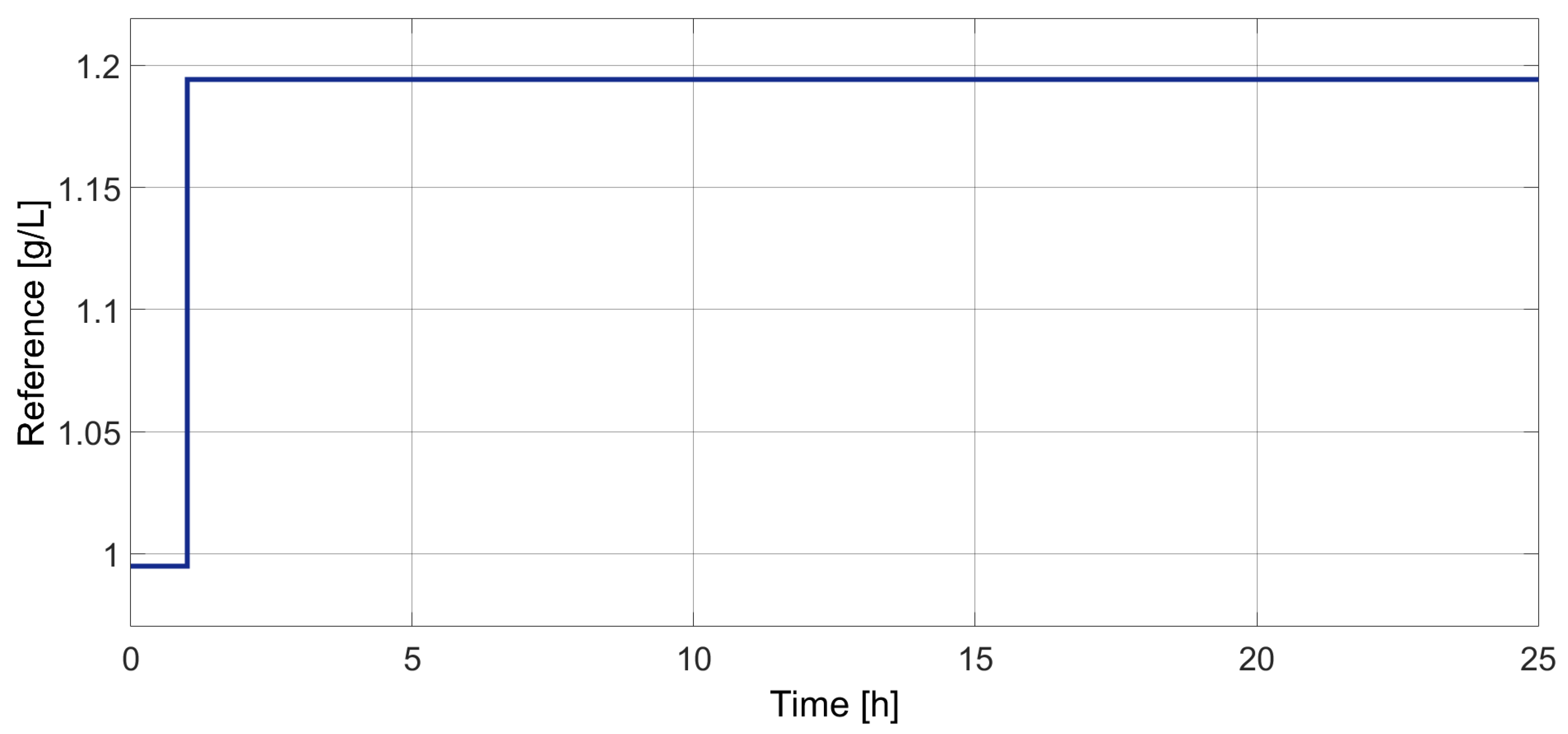
The identification method of the chemical process starts with an input setting that has an initial amplitude of 0.995 [g/L] and then, after 1 [h], grows to 1.194 [g/L] as shown in
Figure 3.
PID controller is tuned from the linearized model
. The linearized model is obtained from [
28]:
Also, the tuning parameters of the PID controller are acquired from [
28], where:
,
and
. The expression of the PID controller is shown below.
With the reference shown in
Figure 3 and the PID controller shown in Equation (
15), the response of the chemical process is shown in
Figure 4.
The identification parameters shown in
Table 1 are obtained from the process output shown in
Figure 4.
From the identification parameters and the equations proposed in [
28], the process can be represented by the transfer function shown in Equation (
16).
Figure 5 shows the response of the process using the PID controller. The nonlinear process and process modeling do not show marked differences, so the identified model is ideal for use in the controller’s design.
6. Conclusions
In this study, a DSMC was developed that combines the concepts of the internal model and sliding mode control. The controller synthesis used a FODUP model of actual processes. The DSMC aims to reduce chattering effects in the control signal. Additionally, an internal loop with a PD controller was incorporated to provide the system with a suitable response to disturbances. The computer simulation of the proposed controller in a bioreactor revealed that the performance of the controller is stable and satisfactory despite nonlinearities in the operating conditions, set-point changes, process disturbances, and modeling errors.
Furthermore, DSMC improved tracking and regulatory tasks by reducing half or more of the response time compared with PID and SMC controllers. Thus, the internal PID controller provides a better response to disturbances. Furthermore, DSMC remarkably balances the response speed and smoothness of the control action. Therefore, considering the incidence of the final control elements, a quick and smooth control response is attained.
Future work for this research includes the use of optimization algorithms to find appropriate parameters or tuning equations for the proposed controller.
In addition, to further validate the proposed control strategy in real-time, Hardware In the Loop (HIL) simulations can be used to implement the proposed algorithm in an embedded system and simulate the dynamics of a nonlinear, unstable chemical process using Matlab®.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}