
An Overview of Indoor Positioning and Mapping Technology Standards



Abstract
:1. Introduction
2. Related Work
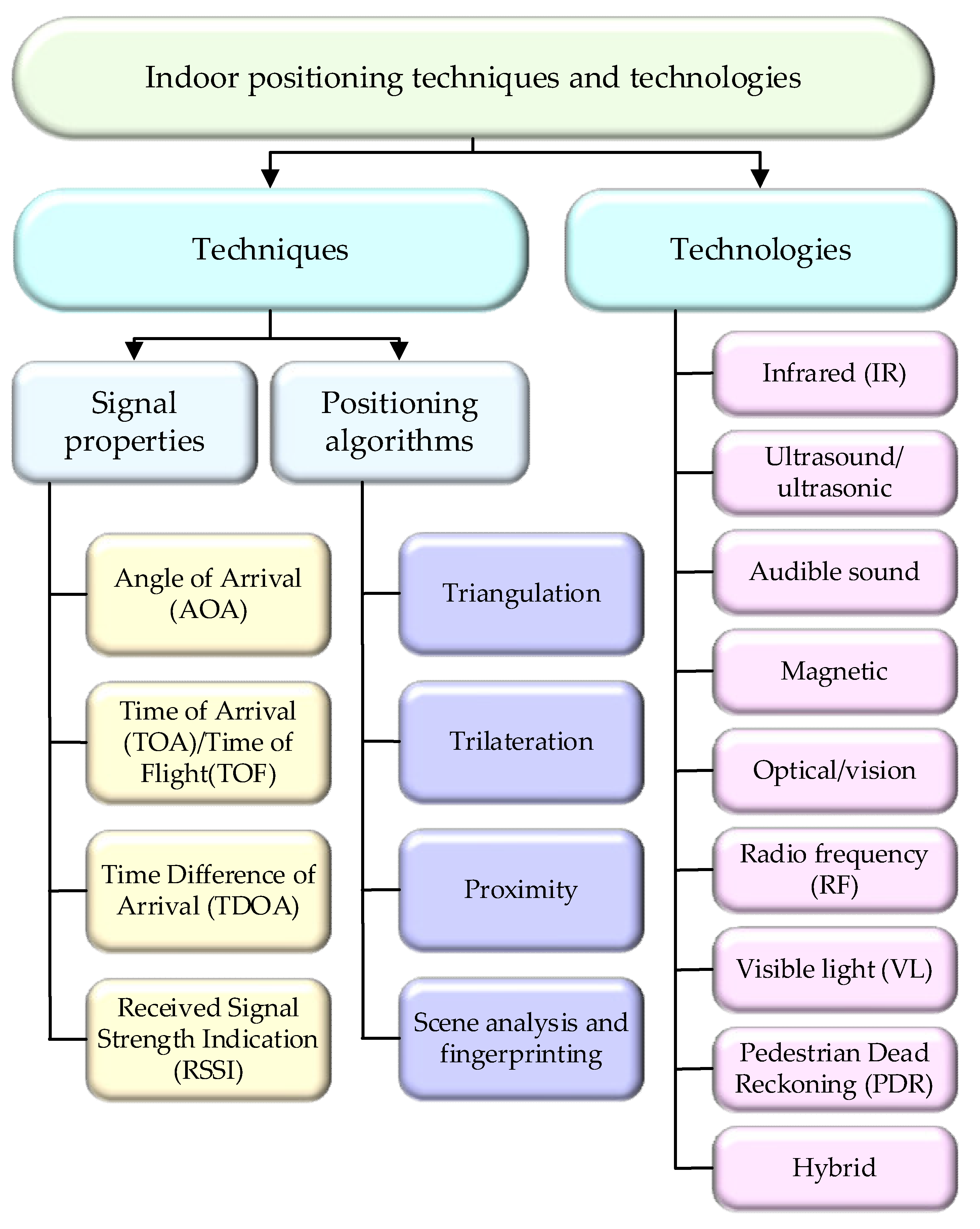
2.1. Indoor Positioning Technologies
2.2. Indoor Mapping Technologies
2.3. Standards for Indoor Positioning, Mapping and Navigation
2.3.1. ISO/IEC RTLS
- Based on a direct sequence spread spectrum (DSSS), ISO/IEC 24730-2 defines a networked location system that provides X-Y coordinates and data telemetry, and it is comprised of this main document [57] and two additional components, that is ISO/IEC 24730-21:2012 [58], which specifies transmitters operating with a single spread code and employing a differential binary phase shift keying (DBPSK) data encoding and binary phase shift keying (BPSK) spreading scheme and ISO/IEC 24730-22:2012 [59], which specifies the air interface for a system that locates an asset in a controlled area.
- Standard ISO/IEC 24730-5 [60], based on a chirp spread spectrum (CSS) technique, defines an air interface protocol which utilizes CSS at frequencies from 2.4 GHz to 2.483 GHz. This protocol supports bidirectional communication and two-way ranging between the readers and tags of an RTLS.
- The ISO/IEC 24730-6 UWB air interface protocol is also comprised of two parts: ISO/IEC 24730-61:2013 [61] defines the physical layer (PHY) and tag management layer (TML) of an UWB air interface protocol that supports one directional simplex communication readers and tags of an RTLS that operate within the 6~10.6 GHz unlicensed band; and ISO/IEC 24730-62:2013 [62] defines the air-interface for RTLS using a physical layer UWB signaling mechanism (based on IEEE 802.15.4a UWB) with high rate pulse repetition frequencies (PRF) of 16 MHz or 64 MHz.
2.3.2. ISO TC204 ITS
2.3.3. OGC CityGML and IndoorGML
- Modularization
- Application Domain Extensions (ADE)
- Multi-scale modelling
- Other characteristics
2.3.4. IEEE MDR
2.3.5. IFC of BuildingSMART
2.3.6. Other Standards and Formats
- ISO 19116:2019 Positioning services, which specifies the data structures and contents of an interface between position-providing device(s) and position-using devices(s) so that position information can be interpreted unambiguously.
- ISO 19133:2005 LBS—Tracking and navigation, which describes the data types, and operations associated with those types, for the implementation of tracking and navigation services.
- ISO 19134:2007 LBS—Multimodal routing and navigation, which specifies the data types and their associated operations for the implementation of multimodal location-based services for routing and navigation.
- ISO 19147:2015 Transfer Nodes, which specifies the data types and code lists associated with those types for the implementation of transfer nodes and their services in transport modelling and location-based services.
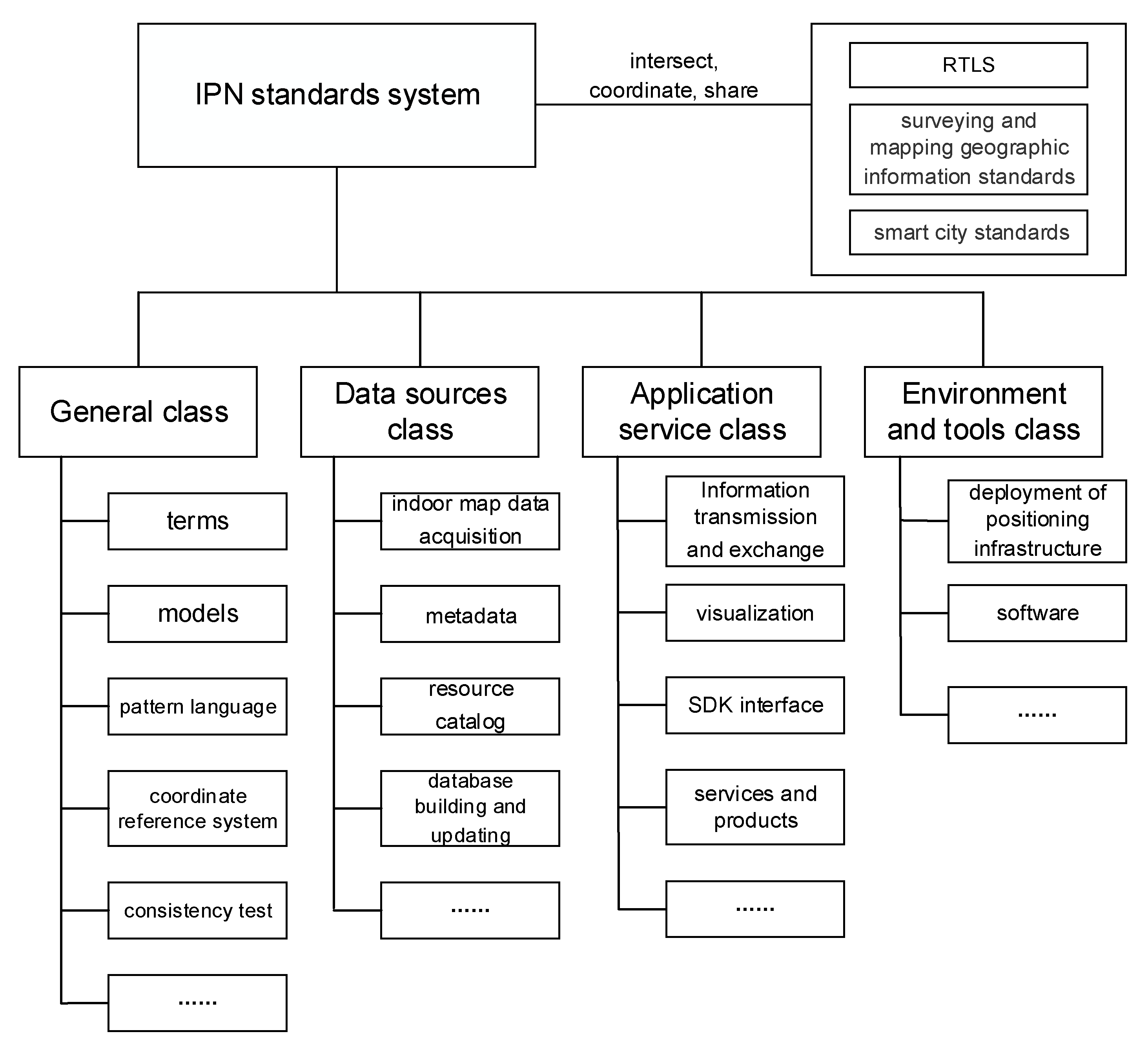
3. Requirements and Architecture of IPMN Standards System
- Positioning device deployment. Indoor positioning technology can be divided as one requiring external equipment and the other, device-free. When utilizing external equipment, such as WIFI, as positioning method, deployment of equipment in indoor scene is needed in advance. Standardization in this stage is required in choosing a deployment method and the equipment and testing method suitable for indoor environments.
- Indoor map data acquisition and organization. Indoor positioning cannot be separated from the visualization of indoor scenes. First, indoor map data models must be built to express indoor scenes explicitly. Second, standards for data acquisition and organization are required because indoor maps are usually limited by wireless network transmission rates and mobile network terminal resolution. In addition, map visualization of large-scale indoor spaces should consider the expression of symbols, color, and semantic information, which also needs relevant standards.
- Seamless indoor and outdoor positioning and navigation services. In large-scale applications, only indoor positioning is not of practical significance. When the environment of pedestrians switches from indoors to outdoors, the corresponding location method, map data, and coordinate system should be switched accordingly, meaning that there must be provision of standards for these transformations. For the final development of an integrated multi-mode indoor positioning systems, software and related protocol standards are required. To achieve navigation, standards for navigation models are a requirement.
- Testing and evaluation. The last stage is testing and evaluating accuracy and cost of positioning technologies. A consistency test is also required for software development. Both of the tests should have standards as guidance.
4. Our Research on IPMN Standards
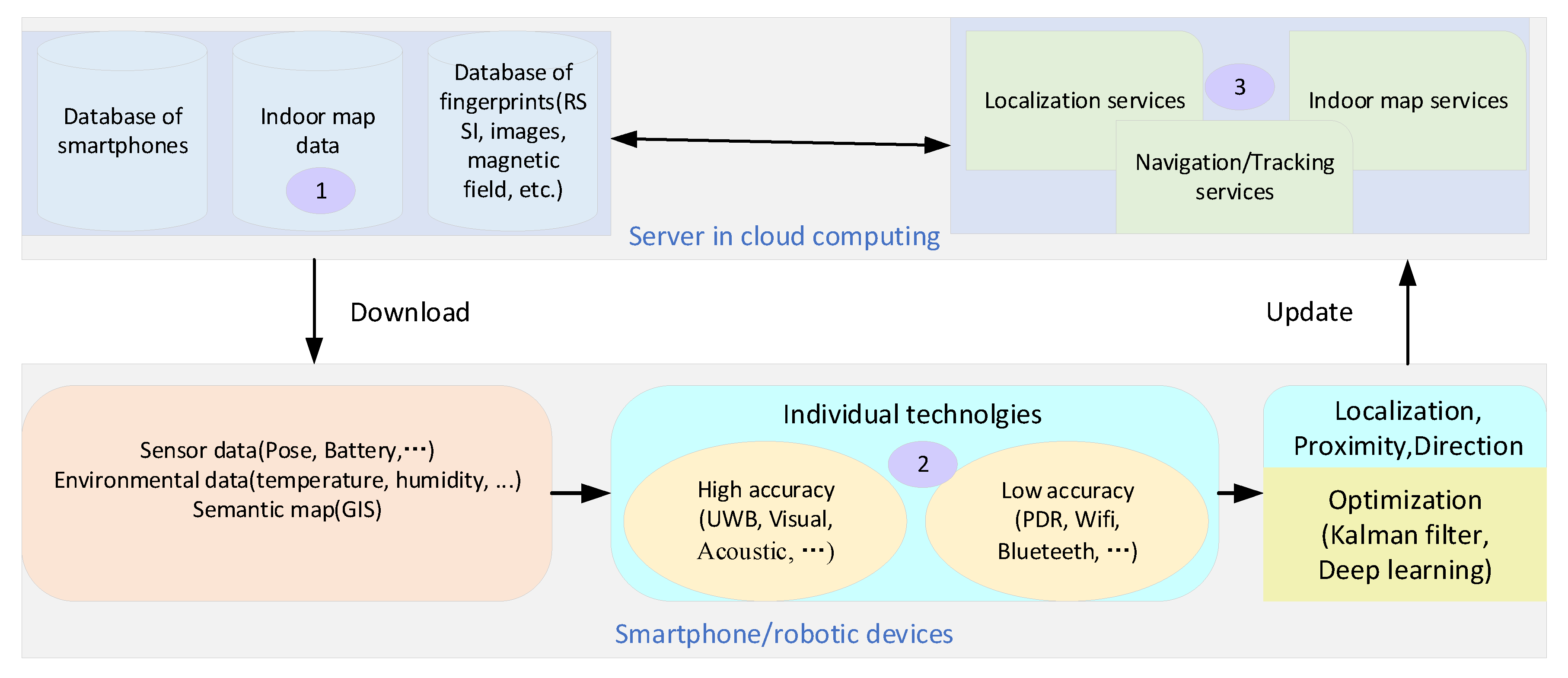
4.1. Hybrid Indoor Positioning System Architecture
- Standards for indoor map data.
- Standards for positioning technologies.
- Standards for navigation service.
- Content model for indoor mapping.
- Data collection for indoor maps.
- GIS model for indoor spatial data.
- Indoor map symbols.
- Specification for digital indoor map products.
- Multi-source fusion positioning data interfaces.
- Seamless cooperative positioning service interfaces.
4.2. Standards for Indoor Map Data
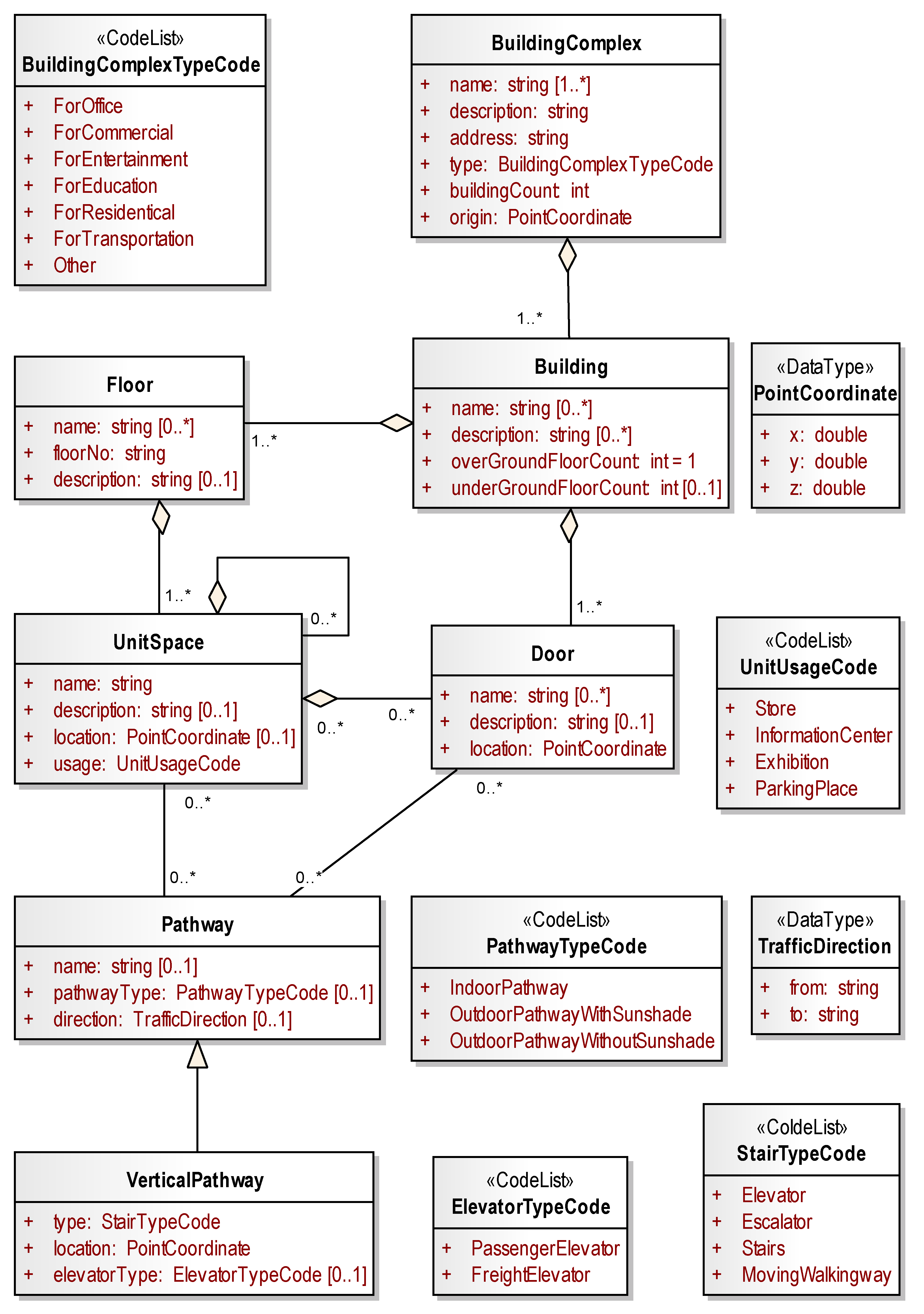
4.2.1. Content Model for Indoor Mapping
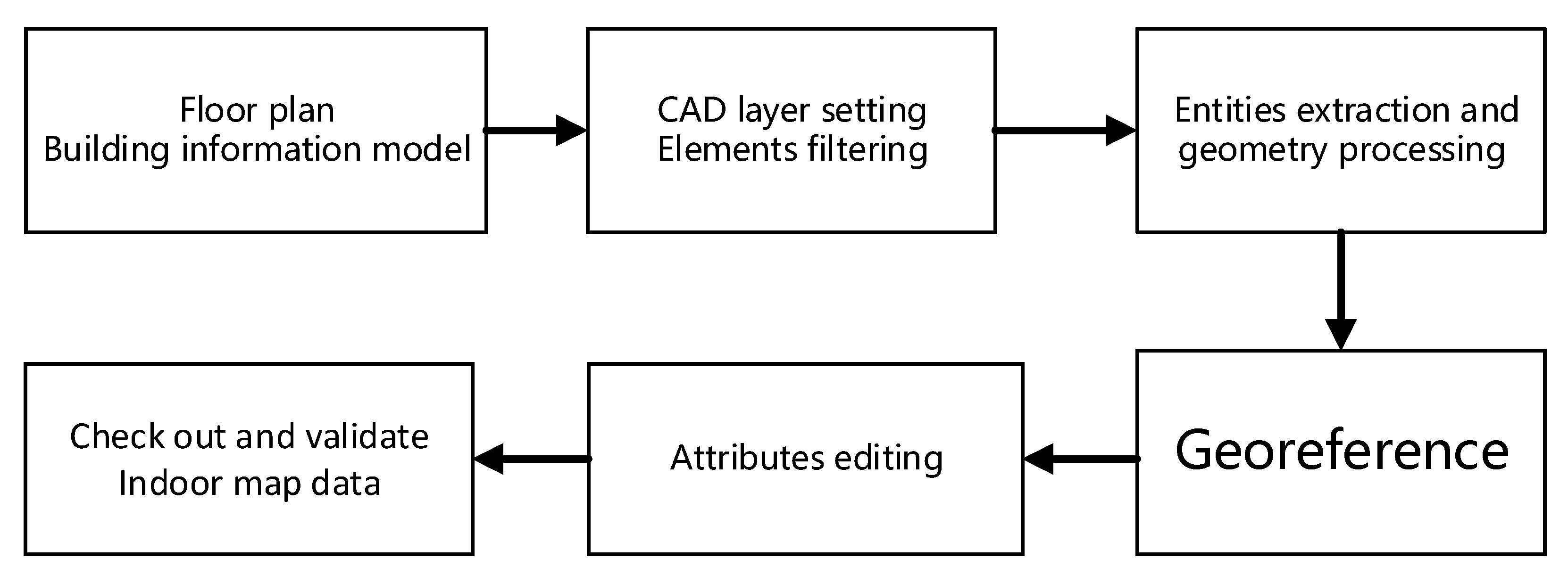
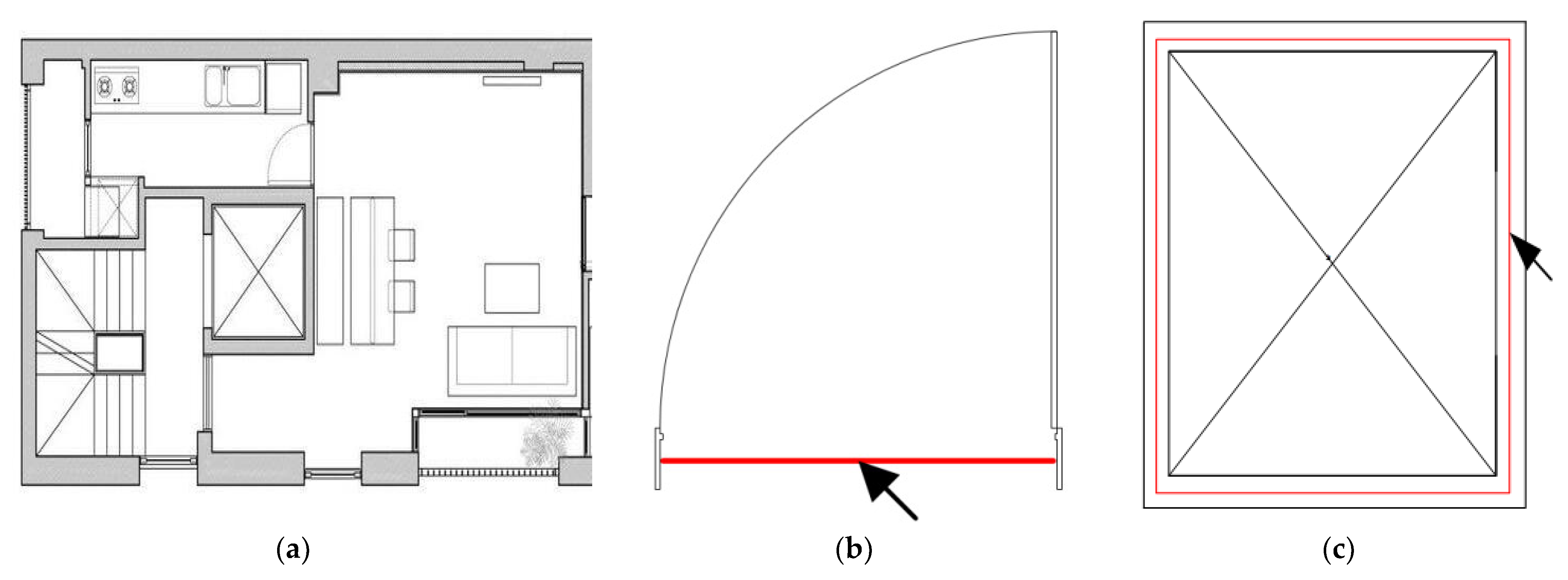
4.2.2. Data Collection for Indoor Maps
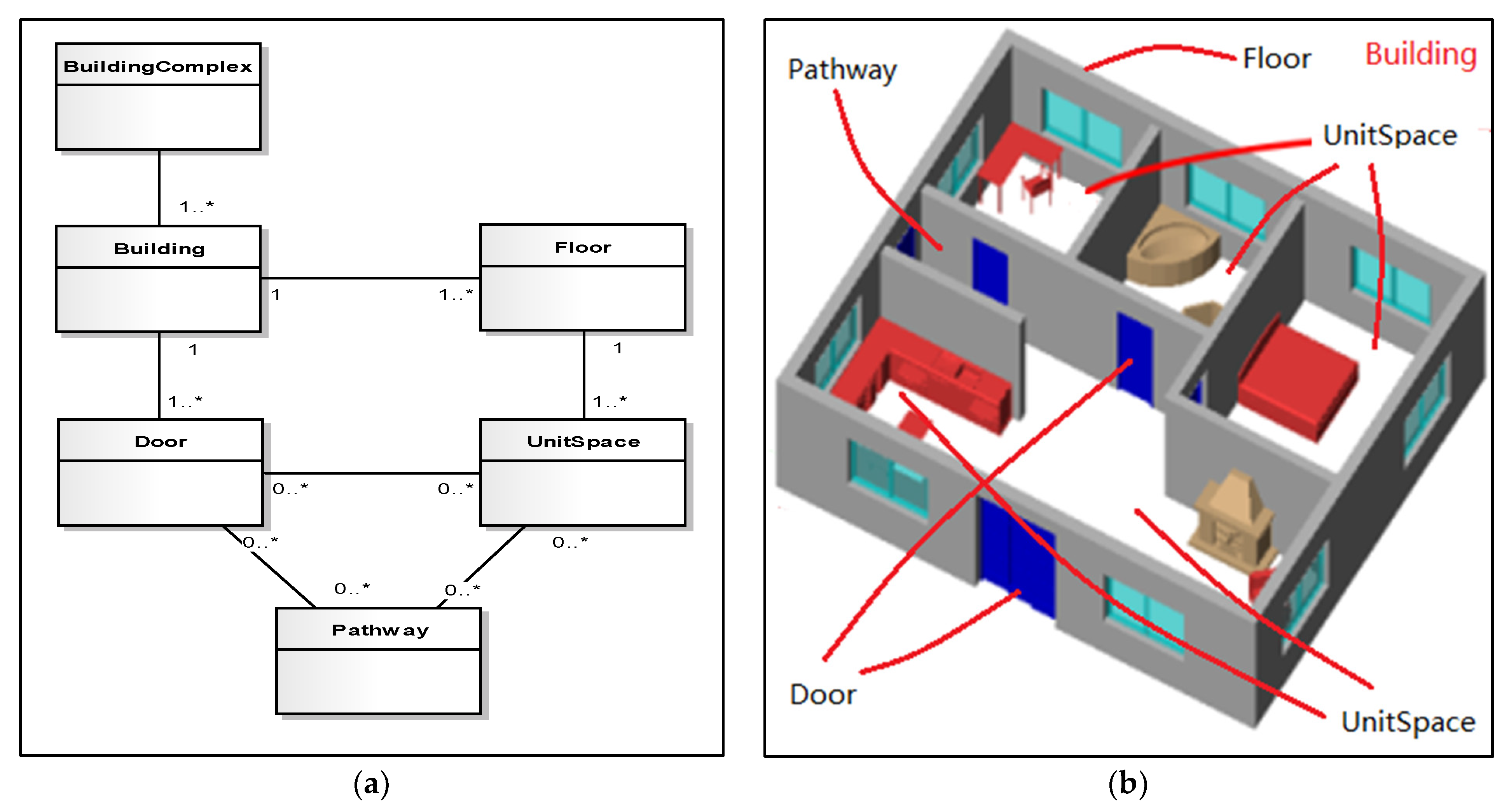
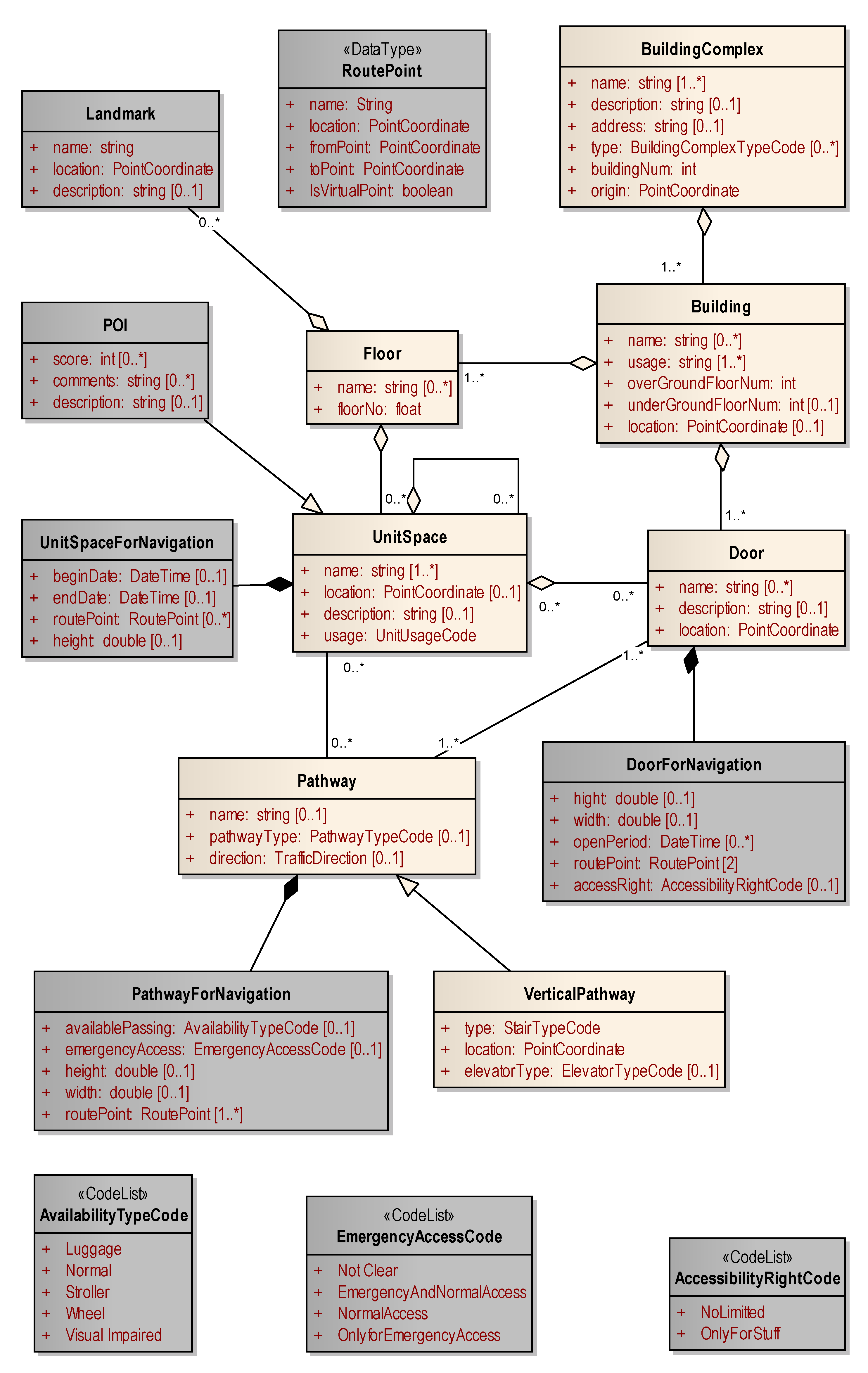
4.2.3. GIS Model for Indoor Spatial Data
4.2.4. Indoor Map Symbols
4.2.5. Specification for Digital Indoor Map Products
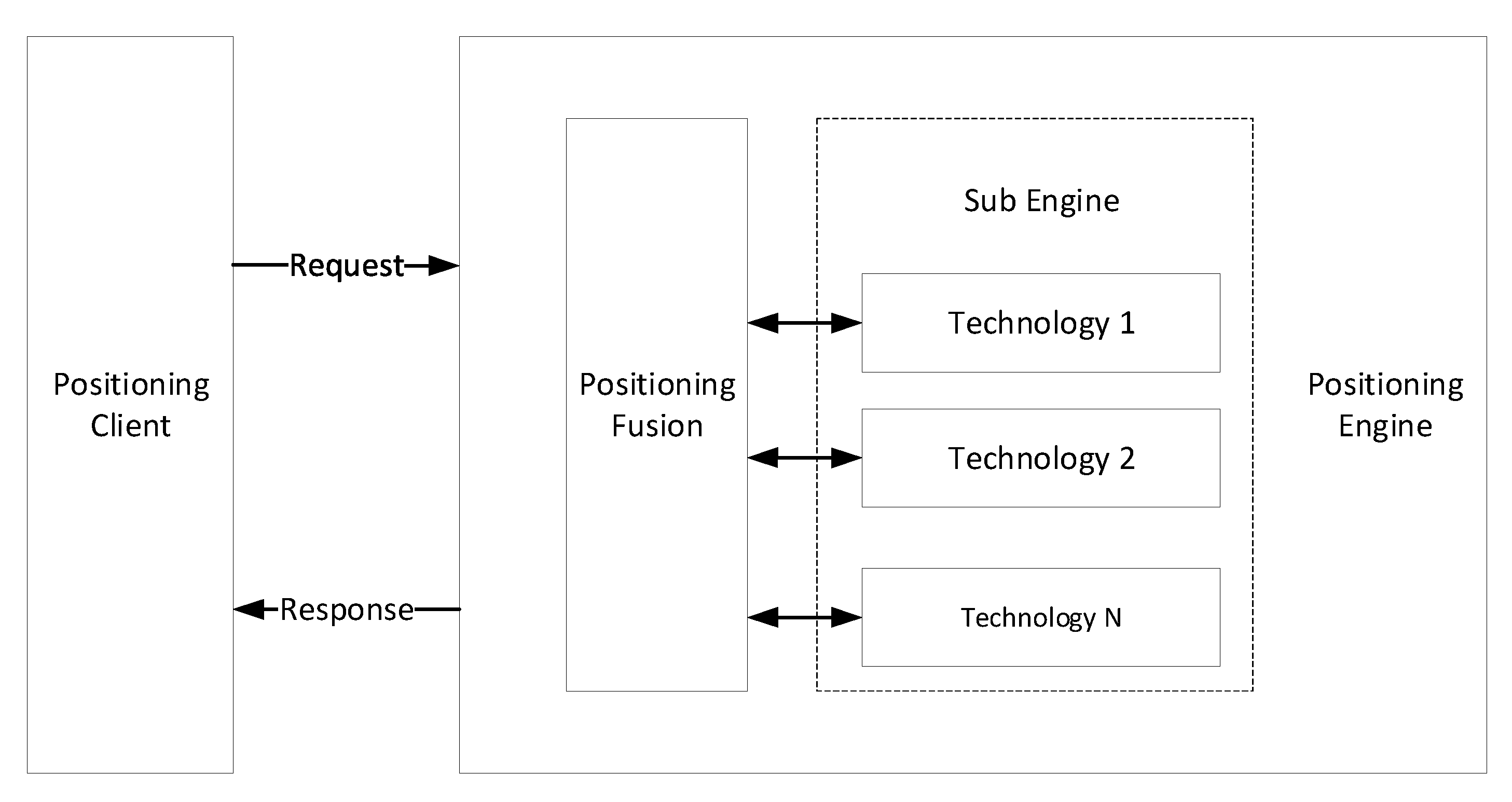
4.3. Multi-Source Fusion Positioning Data Interface
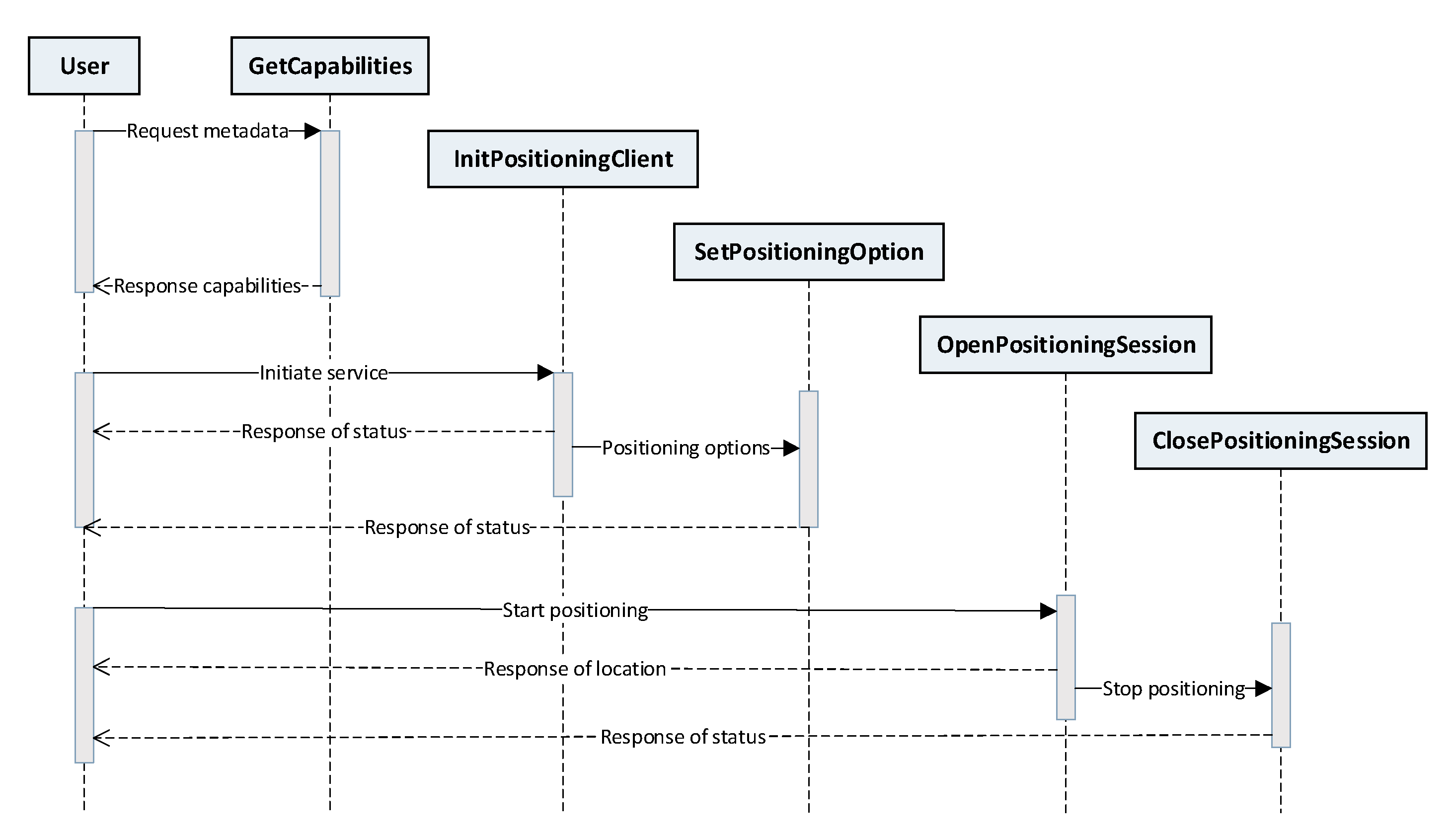
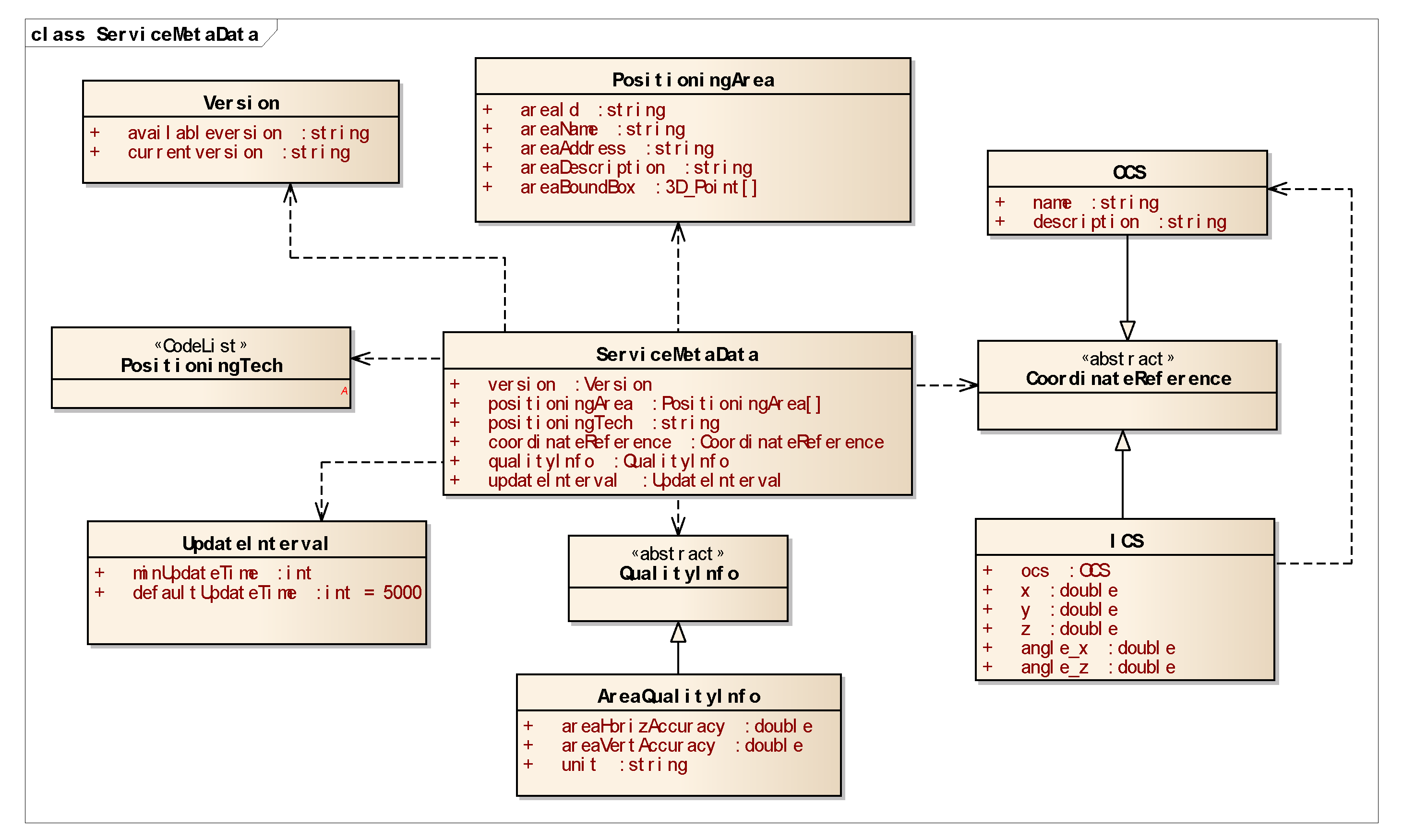
4.4. Seamless Cooperative Positioning Service Interface
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, K.-J.; Zlatanova, S.; Torres-Sospedra, J.; Perez-Navarro, A.; Laoudias, C.; Moreira, A. Survey on Indoor Map Standards and Formats. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–8. [Google Scholar]
- Smith, G.S. Technavio Indoor Positioning and Indoor Navigation Market by Application and Geography—Forecast and Analysis 2021–2025. Available online: https://www.technavio.com/report/indoor-positioning-and-indoor-navigation-market-industry-analysis (accessed on 3 March 2022).
- Tomažič, S. Indoor Positioning and Navigation. Sensors 2021, 21, 4793. [Google Scholar] [CrossRef] [PubMed]
- Basiri, A.; Lohan, E.S.; Moore, T.; Winstanley, A.; Peltola, P.; Hill, C.; Amirian, P.; Figueiredo e Silva, P. Indoor Location Based Services Challenges, Requirements and Usability of Current Solutions. Comput. Sci. Rev. 2017, 24, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Zafari, F.; Gkelias, A.; Leung, K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Mendoza-Silva, G.M.; Torres-Sospedra, J.; Huerta, J. A Meta-Review of Indoor Positioning Systems. Sensors 2019, 19, 4507. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Simões, W.C.S.S.; Machado, G.S.; Sales, A.M.A.; de Lucena, M.M.; Jazdi, N.; de Lucena, V.F. A Review of Technologies and Techniques for Indoor Navigation Systems for the Visually Impaired. Sensors 2020, 20, 3935. [Google Scholar] [CrossRef] [PubMed]
- Gunduz, M.; Isikdag, U.; Basaraner, M. A Review of Recent Research in Indoor Modelling & Mapping. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B4, 289–294. [Google Scholar] [CrossRef] [Green Version]
- Teixeira, H.; Magalhães, A.; Ramalho, A.; de Pina, M.F.; Gonçalves, H. Indoor Environments and Geographical Information Systems: A Systematic Literature Review. SAGE Open 2021, 11, 215824402110503. [Google Scholar] [CrossRef]
- Nossum, A.S. Developing a Framework for Describing and Comparing Indoor Maps. Cartogr. J. 2013, 50, 218–224. [Google Scholar] [CrossRef]
- Ryoo, H.-G.; Kim, T.; Li, K.-J. Comparison between Two OGC Standards for Indoor Space: CityGML and IndoorGML. In Proceedings of the Seventh ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness, Bellevue, WA, USA, 3 November 2015; pp. 1–8. [Google Scholar]
- Lluvia, I.; Lazkano, E.; Ansuategi, A. Active Mapping and Robot Exploration: A Survey. Sensors 2021, 21, 2445. [Google Scholar] [CrossRef]
- ISO 17438-4:2019; Intelligent Transport Systems—Indoor Navigation for Personal and Vehicle ITS Station—Part 4: Requirements and Specifications for Interface between Personal/Vehicle and Central ITS Stations. International Organization for Standardization: Geneva, Switzerland, 2019.
- Sakpere, W.; Adeyeye Oshin, M.; Mlitwa, N.B. A State-of-the-Art Survey of Indoor Positioning and Navigation Systems and Technologies. S. Afr. Comput. J. 2017, 29, 145–197. [Google Scholar] [CrossRef] [Green Version]
- Brena, R.F.; García-Vázquez, J.P.; Galván-Tejada, C.E.; Muñoz-Rodriguez, D.; Vargas-Rosales, C.; Fangmeyer, J. Evolution of Indoor Positioning Technologies: A Survey. J. Sens. 2017, 2017, 1–21. [Google Scholar] [CrossRef]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent Advances in Indoor Localization: A Survey on Theoretical Approaches and Applications. IEEE Commun. Surv. Tutor. 2017, 19, 1327–1346. [Google Scholar] [CrossRef] [Green Version]
- Kunhoth, J.; Karkar, A.; Al-Maadeed, S.; Al-Ali, A. Indoor Positioning and Wayfinding Systems: A Survey. Hum. Cent. Comput. Inf. Sci. 2020, 10, 18. [Google Scholar] [CrossRef]
- Mautz, R. Overview of Current Indoor Positioning Systems. Geod. Cartogr. 2009, 35, 18–22. [Google Scholar] [CrossRef]
- Al-Ammar, M.A.; Alhadhrami, S.; Al-Salman, A.; Alarifi, A.; Al-Khalifa, H.S.; Alnafessah, A.; Alsaleh, M. Comparative Survey of Indoor Positioning Technologies, Techniques, and Algorithms. In Proceedings of the 2014 International Conference on Cyberworlds, Santander, Spain, 6–8 October 2014; pp. 245–252. [Google Scholar]
- Ferreira, A.F.G.; Fernandes, D.M.A.; Catarino, A.P.; Monteiro, J.L. Localization and Positioning Systems for Emergency Responders: A Survey. IEEE Commun. Surv. Tutor. 2017, 19, 2836–2870. [Google Scholar] [CrossRef]
- Khelifi, F.; Bradai, A.; Benslimane, A.; Rawat, P.; Atri, M. A Survey of Localization Systems in Internet of Things. Mob. Netw. Appl. 2019, 24, 761–785. [Google Scholar] [CrossRef]
- Liu, Z.; Dai, W.; Win, M.Z. Mercury: An Infrastructure-Free System for Network Localization and Navigation. IEEE Trans. Mob. Comput. 2018, 17, 1119–1133. [Google Scholar] [CrossRef]
- He, S.; Chan, S.-H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]
- Xiao, J.; Zhou, Z.; Yi, Y.; Ni, L.M. A Survey on Wireless Indoor Localization from the Device Perspective. ACM Comput. Surv. 2016, 49, 1–31. [Google Scholar] [CrossRef]
- Lymberopoulos, D.; Liu, J.; Yang, X.; Choudhury, R.R.; Handziski, V.; Sen, S. A Realistic Evaluation and Comparison of Indoor Location Technologies: Experiences and Lessons Learned. In Proceedings of the 14th International Conference on Information Processing in Sensor Networks, Seattle, WA, USA, 13 April 2015; pp. 178–189. [Google Scholar]
- Singh, S.P.; Sharma, S.C. A Survey on Cluster Based Routing Protocols in Wireless Sensor Networks. Procedia Comput. Sci. 2015, 45, 687–695. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Zhu, H.-B.; Du, Q.-X.; Tang, S.-M. A Survey of the Research Status of Pedestrian Dead Reckoning Systems Based on Inertial Sensors. Int. J. Autom. Comput. 2019, 16, 65–83. [Google Scholar] [CrossRef]
- Chen, R.; Chen, L. Smartphone-Based Indoor Positioning Technologies. In Urban Informatics; Shi, W., Goodchild, M.F., Batty, M., Kwan, M.-P., Zhang, A., Eds.; The Urban Book Series; Springer: Singapore, 2021; pp. 467–490. ISBN 9789811589829. [Google Scholar]
- Van Haute, T.; De Poorter, E.; Crombez, P.; Lemic, F.; Handziski, V.; Wirström, N.; Wolisz, A.; Voigt, T.; Moerman, I. Performance Analysis of Multiple Indoor Positioning Systems in a Healthcare Environment. Int. J. Health Geogr. 2016, 15, 7. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Saeed, N.; Nam, H.; Al-Naffouri, T.Y.; Alouini, M.-S. A State-of-the-Art Survey on Multidimensional Scaling-Based Localization Techniques. IEEE Commun. Surv. Tutor. 2019, 21, 3565–3583. [Google Scholar] [CrossRef] [Green Version]
- Boudani, B.E.; Kanaris, L.; Kokkinis, A.; Chrysoulas, C.; Dagiuklas, T.; Stavrou, S. Positioning as Service for 5G IoT Networks. In Proceedings of the 2021 Telecoms Conference (ConfTELE), Leiria, Portugal, 11 February 2021; pp. 1–6. [Google Scholar]
- Chen, L.; Zhou, X.; Chen, F.; Yang, L.-L.; Chen, R. Carrier Phase Ranging for Indoor Positioning with 5G NR Signals. IEEE Internet Things J. 2021. Available online: https://ieeexplore.ieee.org/document/9601204 (accessed on 3 March 2022). [CrossRef]
- Boudani, B.E.; Kanaris, L.; Kokkinis, A.; Kyriacou, M.; Chrysoulas, C.; Stavrou, S.; Dagiuklas, T. Implementing Deep Learning Techniques in 5G IoT Networks for 3D Indoor Positioning: DELTA (DeEp Learning-Based Co-OperaTive Architecture). Sensors 2020, 20, 5495. [Google Scholar] [CrossRef]
- Horsmanheimo, S.; Lembo, S.; Tuomimaki, L.; Huilla, S.; Honkamaa, P.; Laukkanen, M.; Kemppi, P. Indoor Positioning Platform to Support 5G Location Based Services. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Kapovits, A.; Gavras, A.; Cosmas, J.; Ghoraishi, M.; Li, X.; Zhang, Y. Delivery of 5G Services Indoors—The Wireless Wire Challenge and Solutions. 2021. Available online: https://zenodo.org/record/4280750#.YiXYXGhByMo (accessed on 3 March 2022).
- Keller, F.; Sternberg, H. Multi-Sensor Platform for Indoor Mobile Mapping: System Calibration and Using a Total Station for Indoor Applications. Remote Sens. 2013, 5, 5805–5824. [Google Scholar] [CrossRef] [Green Version]
- Zlatanova, S.; Sithole, G.; Nakagawa, M.; Zhu, Q. Problems In Indoor Mapping and Modelling. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-4/W4, 63–68. [Google Scholar] [CrossRef] [Green Version]
- Otero, R.; Lagüela, S.; Garrido, I.; Arias, P. Mobile Indoor Mapping Technologies: A Review. Autom. Constr. 2020, 120, 103399. [Google Scholar] [CrossRef]
- Di Stefano, F.; Chiappini, S.; Gorreja, A.; Balestra, M.; Pierdicca, R. Mobile 3D Scan LiDAR: A Literature Review. Geomat. Nat. Hazards Risk 2021, 12, 2387–2429. [Google Scholar] [CrossRef]
- Virtanen, J.-P.; Kurkela, M.; Turppa, T.; Vaaja, M.T.; Julin, A.; Kukko, A.; Hyyppä, J.; Ahlavuo, M.; von Numers, J.E.; Haggrén, H.; et al. Depth Camera Indoor Mapping for 3D Virtual Radio Play. Photogram Rec. 2018, 33, 171–195. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Tang, J.; Jiang, C.; Zhu, L.; Lehtomäki, M.; Kaartinen, H.; Kaijaluoto, R.; Wang, Y.; Hyyppä, J.; Hyyppä, H.; et al. The Accuracy Comparison of Three Simultaneous Localization and Mapping (SLAM)-Based Indoor Mapping Technologies. Sensors 2018, 18, 3228. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, Y.; Shang, J.; Chen, P.; Zlatanova, S.; Hu, X.; Zhou, Z. Indoor Mapping and Modeling by Parsing Floor Plan Images. Int. J. Geogr. Inf. Sci. 2021, 35, 1205–1231. [Google Scholar] [CrossRef]
- Khoshelham, K.; Tran, H.; Acharya, D.; Vilariño, L.D.; Kang, Z.; Dalyot, S. Results of the ISPRS Benchmark on Indoor Modelling. ISPRS Open J. Photogramm. Remote Sens. 2021, 2, 100008. [Google Scholar] [CrossRef]
- Afyouni, I.; Ray, C.; Claramunt, C. Spatial Models for Context-Aware Indoor Navigation Systems: A Survey. J. Spat. Inf. Sci. 2012, 1, 85–123. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Wang, X.; Wright, G.; Cheng, J.; Li, X.; Liu, R. A State-of-the-Art Review on the Integration of Building Information Modeling (BIM) and Geographic Information System (GIS). ISPRS Int. J. Geo-Inf. 2017, 6, 53. [Google Scholar] [CrossRef] [Green Version]
- Penttilä H Describing the Changes in Architectural Information Technology to Understand Design Complexity and Free-Form Architectural Expression. J. Inf. Technol. Constr. 2006, 11, 395–408.
- Biljecki, F.; Stoter, J.; Ledoux, H.; Zlatanova, S.; Çöltekin, A. Applications of 3D City Models: State of the Art Review. ISPRS Int. J. Geo-Inf. 2015, 4, 2842–2889. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.; Chen, J.; Huang, W. Method for Generation of Indoor GIS Models Based on BIM Models to Support Adjacent Analysis of Indoor Spaces. ISPRS Int. J. Geo-Inf. 2020, 9, 508. [Google Scholar] [CrossRef]
- Liu, L.; Li, B.; Zlatanova, S.; van Oosterom, P. Indoor Navigation Supported by the Industry Foundation Classes (IFC): A Survey. Autom. Constr. 2021, 121, 103436. [Google Scholar] [CrossRef]
- Wu, B.; Zhang, S. Integration of gis and bim for indoor geovisual analytics. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B2, 455–458. [Google Scholar] [CrossRef] [Green Version]
- Sun, Q.; Zhou, X.; Hou, D. A Simplified CityGML-Based 3D Indoor Space Model for Indoor Applications. Appl. Sci. 2020, 10, 7218. [Google Scholar] [CrossRef]
- Weinmann, M.; Wursthorn, S.; Weinmann, M.; Hübner, P. Efficient 3D Mapping and Modelling of Indoor Scenes with the Microsoft HoloLens: A Survey. PFG 2021, 89, 319–333. [Google Scholar] [CrossRef]
- Andersen, D.; Popescu, V. An AR-Guided System for Fast Image-Based Modeling of Indoor Scenes. In Proceedings of the 2018 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Reutlingen, Germany, 18–22 March 2018; pp. 501–502. [Google Scholar]
- Chen, J.; Clarke, K.C. Modeling Standards and File Formats for Indoor Mapping. In Proceedings of the 3rd International Conference on Geographical Information Systems Theory, Applications and Management, Porto, Portugal, 27–28 April 2017; pp. 268–275. [Google Scholar]
- Rácz-Szabó, A.; Ruppert, T.; Bántay, L.; Löcklin, A.; Jakab, L.; Abonyi, J. Real-Time Locating System in Production Management. Sensors 2020, 20, 6766. [Google Scholar] [CrossRef] [PubMed]
- ISO/IEC 24730-1:2014; Information Technology—Real-Time Locating Systems (RTLS)—Part 1: Application Programming Interface (API). International Organization for Standardization: Geneva, Switzerland, 2014.
- ISO/IEC 24730-2:2012; Information Technology—Real Time Locating Systems (RTLS)—Part 2: Direct Sequence Spread Spectrum (DSSS) 2,4 GHz Air Interface Protocol. International Organization for Standardization: Geneva, Switzerland, 2012.
- ISO/IEC 24730-21:2012; Information Technology—Real Time Locating Systems (RTLS)—Part 21: Direct Sequence Spread Spectrum (DSSS) 2,4 GHz Air Interface Protocol: Transmitters Operating with a Single Spread Code and Employing a DBPSK Data Encoding and BPSK Spreading Scheme. International Organization for Standardization: Geneva, Switzerland, 2012.
- ISO/IEC 24730-22:2012; Information Technology—Real Time Locating Systems (RTLS)—Part 22: Direct Sequence Spread Spectrum (DSSS) 2,4 GHz Air Interface Protocol: Transmitters Operating with Multiple Spread Codes and Employing a QPSK Data Encoding and Walsh Offset QPSK (WOQPSK) Spreading Scheme. International Organization for Standardization: Geneva, Switzerland, 2012.
- ISO/IEC 24730-5:2010; Information Technolog—Real-Time Locating Systems (RTLS)—Part 5: Chirp Spread Spectrum (CSS) at 2,4 GHz Air Interface. International Organization for Standardization: Geneva, Switzerland, 2012.
- ISO/IEC 24730-61:2013; Information Technology—Real Time Locating Systems (RTLS)—Part 61: Low Rate Pulse Repetition Frequency Ultra Wide Band (UWB) Air Interface. International Organization for Standardization: Geneva, Switzerland, 2013.
- ISO/IEC 24730-62:2013; Information Technology—Real Time Locating Systems (RTLS)—Part 62: High Rate Pulse Repetition Frequency Ultra Wide Band (UWB) Air Interface. International Organization for Standardization: Geneva, Switzerland, 2013.
- ISO/IEC 24769-2:2013; Information Technology—Real-Time Locating Systems (RTLS) Device Conformance Test Methods—Part 2: Test Methods for Air Interface Communication at 2,4 GHz. International Organization for Standardization: Geneva, Switzerland, 2013.
- ISO/IEC 24769-5:2012; Information Technology—Automatic Identification and Data Capture Techniques—Real Time Locating Systems (RTLS) Device Conformance Test Methods—Part 5: Test Methods for Chirp Spread Spectrum (CSS) at 2,4 GHz Air Interface. International Organization for Standardization: Geneva, Switzerland, 2012.
- ISO/IEC 24769-61:2015; Information Technology—Real Time Locating System (RTLS) Device Conformance Test Methods—Part 61: Low Rate Pulse Repetition Frequency Ultra Wide Band (UWB) Air Interface. International Organization for Standardization: Geneva, Switzerland, 2015.
- ISO/IEC 24769-62:2015; Information Technology—Real Time Locating System (RTLS) Device Conformance Test Methods—Part 62: High Rate Pulse Repetition Frequency Ultra Wide Band (UWB) Air Interface. International Organization for Standardization: Geneva, Switzerland, 2015.
- ISO/IEC 24770:2012; Information Technology—Real-Time Locating System (RTLS) Device Performance Test Methods—Test Methods for Air Interface Communication at 2,4 GHz. International Organization for Standardization: Geneva, Switzerland, 2012.
- ISO/IEC 24770-5:2019; Information Technology—Real-Time Locating System (RTLS) Device Performance Test Methods—Part 5: Test Methods for Chirp Spread Spectrum (CSS) Air Interface. International Organization for Standardization: Geneva, Switzerland, 2019.
- ISO/IEC 24770-61:2015; Information Technology—Real Time Locating System (RTLS) Device Performance Test Methods—Part 61: Low Rate Pulse Repetition Frequency Ultra Wide Band (UWB) Air Interface. International Organization for Standardization: Geneva, Switzerland, 2015.
- ISO/IEC 24770-62:2015; Information Technology—Real-Time Locating System (RTLS) Device Performance Test Methods—Part 62: High Rate Pulse Repetition Frequency Ultra Wide Band (UWB) Air Interface. International Organization for Standardization: Geneva, Switzerland, 2015.
- ISO/IEC 18305:2016; Information Technology—Real Time Locating Systems—Test and Evaluation of Localization and Tracking Systems. International Organization for Standardization: Geneva, Switzerland, 2016.
- Potorti, F.; Crivello, A.; Barsocchi, P.; Palumbo, F. Evaluation of Indoor Localisation Systems: Comments on the ISO/IEC 18305 Standard. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–7. [Google Scholar]
- Market-Growth, S.; Trends, F. Mordor Intelligence Intelligent Transport Systems Market—Growth, Trends, COVID-19 Impact, and Forecasts (2021–2026). Available online: https://www.researchandmarkets.com/reports/4557725/intelligent-transport-systems-market-growth (accessed on 3 March 2022).
- National Research Council (U.S.). Committee for Review of the U.S. Department of Transportation’s Intelligent Transportation Systems Standards Program Standards for Intelligent Transportation Systems: Review of the Federal Program; Transportation Research Board: Washington, DC, USA, 2000; ISBN 978-0-309-06745-4. [Google Scholar]
- Uden, L.; Dimitrakopoulos, G.J.; Varlamis, I. (Eds.) The Future of Intelligent Transport Systems, 1st ed.; Elsevier: San Diego, CA, USA, 2020; ISBN 978-0-12-818281-9. [Google Scholar]
- Williams, B. Intelligent Transport Systems Standards; Artech House: Boston, UK, 2008. [Google Scholar]
- ISO 17438-1:2016; Intelligent Transport Systems—Indoor Navigation for Personal and Vehicle ITS Station—Part 1: General Information and Use Case Definition. International Organization for Standardization: Geneva, Switzerland, 2016.
- ISO 17267:2009; Intelligent Transport Systems—Navigation Systems—Application Programming Interface (API). International Organization for Standardization: Geneva, Switzerland, 2009.
- ISO 14825:2011; Intelligent Transport Systems—Geographic Data Files (GDF)—GDF5.0. International Organization for Standardization: Geneva, Switzerland, 2011.
- ISO 20524-1:2020; Intelligent Transport Systems—Geographic Data Files (GDF) GDF5.1—Part 1: Application Independent Map Data Shared between Multiple Sources. International Organization for Standardization: Geneva, Switzerland, 2020.
- ISO 20524-2:2020; Intelligent Transport Systems—Geographic Data Files (GDF) GDF5.1—Part 2: Map Data Used in Automated Driving Systems, Cooperative ITS, and Multi-Modal Transport. International Organization for Standardization: Geneva, Switzerland, 2020.
- Gröger, G.; Kolbe, T.H.; Nagel, C.; Häfele, K. OGC City Geography Markup Language (CityGML) Encoding Standard. Available online: https://www.ogc.org/standards/citygml (accessed on 3 March 2022).
- Noardo, F.; Arroyo Ohori, K.; Biljecki, F.; Ellul, C.; Harrie, L.; Krijnen, T.; Eriksson, H.; van Liempt, J.; Pla, M.; Ruiz, A.; et al. Reference Study of CityGML Software Support: The GeoBIM Benchmark 2019—Part II. Trans. GIS 2021, 25, 842–868. [Google Scholar] [CrossRef]
- Biljecki, F.; Kumar, K.; Nagel, C. CityGML Application Domain Extension (ADE): Overview of Developments. Open Geospat. Data Softw. Stand. 2018, 3, 13. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.; Kang, H.; Lee, J. Developing CityGML Indoor ADE to Manage Indoor Facilities. In Innovations in 3D Geo-Information Sciences; Isikdag, U., Ed.; Lecture Notes in Geoinformation and Cartography; Springer International Publishing: Cham, Switzerland, 2014; pp. 243–265. ISBN 978-3-319-00514-0. [Google Scholar]
- Lee, J.; Li, K.-J.; Zlatanova, S.; Kolbe, T.H.; Nagel, C.; Becker, T. OGC IndoorGML. Available online: https://docs.ogc.org/is/19-011r4/19-011r4.html (accessed on 3 March 2022).
- Kang, H.-K.; Li, K.-J. A Standard Indoor Spatial Data Model—OGC IndoorGML and Implementation Approaches. ISPRS Int. J. Geo-Inf. 2017, 6, 116. [Google Scholar] [CrossRef]
- Li, K.-J.; Conti, G.; Konstantinidis, E.; Zlatanova, S.; Bamidis, P. OGC IndoorGML: A Standard Approach for Indoor Maps. In Geographical and Fingerprinting Data to Create Systems for Indoor Positioning and Indoor/Outdoor Navigation; Elsevier: Amsterdam, The Netherlands, 2019; pp. 187–207. ISBN 978-0-12-813189-3. [Google Scholar]
- Kim, J.-S.; Yoo, S.-J.; Li, K.-J. Integrating IndoorGML and CityGML for Indoor Space. In Web and Wireless Geographical Information Systems; Pfoser, D., Li, K.-J., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2014; Volume 8470, pp. 184–196. ISBN 978-3-642-55333-2. [Google Scholar]
- Diakité, A.A.; Zlatanova, S.; Alattas, A.F.M.; Li, K.J. Towards INDOORGML 2.0: Updates and case study illustrations. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIII-B4-2020, 337–344. [Google Scholar] [CrossRef]
- IEEE Robotics and Automation Society; Standing Committee for Standards; Institute of Electrical and Electronics Engineers; IEEE-SA Standards Board. IEEE Standard for Robot Map Data Representation for Navigation; IEEE: New York, NY, USA, 2015; ISBN 978-0-7381-9893-4. [Google Scholar]
- Amigoni, F.; Yu, W.; Andre, T.; Holz, D.; Magnusson, M.; Matteucci, M.; Moon, H.; Yokotsuka, M.; Biggs, G.; Madhavan, R. A Standard for Map Data Representation: IEEE 1873-2015 Facilitates Interoperability Between Robots. IEEE Robot. Automat. Mag. 2018, 25, 65–76. [Google Scholar] [CrossRef] [Green Version]
- ISO 16739-1:2018; Industry Foundation Classes (IFC) for Data Sharing in the Construction and Facility Management Industries—Part 1: Data Schema. International Organization for Standardization: Geneva, Switzerland, 2018.
- Noardo, F.; Krijnen, T.; Arroyo Ohori, K.; Biljecki, F.; Ellul, C.; Harrie, L.; Eriksson, H.; Polia, L.; Salheb, N.; Tauscher, H.; et al. Reference Study of IFC Software Support: The GeoBIM Benchmark 2019—Part I. Trans. GIS 2021, 25, 805–841. [Google Scholar] [CrossRef]
- Lim, J.; Tauscher, H.; Biljecki, F. Graph transformation rules for ifc-to-citygml attribute conversion. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, IV-4/W8, 83–90. [Google Scholar] [CrossRef] [Green Version]
- Lin, Y.-H.; Liu, Y.-S.; Gao, G.; Han, X.-G.; Lai, C.-Y.; Gu, M. The IFC-Based Path Planning for 3D Indoor Spaces. Adv. Eng. Inform. 2013, 27, 189–205. [Google Scholar] [CrossRef] [Green Version]
- Gilbert, T.; Rönsdorf, C.; Plume, J.; Simmons, S.; Nisbet, N.; Gruler, H.C.; Kolbe, T.H.; van Berlo, L.; Mercer, A. Built Environment Data Standards and Their Integration: An Analysis of IFC. CityGML and LandInfra. Available online: https://buildingsmart-1xbd3ajdayi.netdna-ssl.com/wp-content/uploads/2021/02/IDBE_Standards_Integration_v1.1_28_JAN_2021.pdf (accessed on 3 March 2022).
- OGC. Land and Infrastructure Conceptual Model Standard (LandInfra); Open Geospatial Consortium: Arlington, VA, USA, 2016; Available online: https://www.ogc.org/standards/landinfra (accessed on 3 March 2022).
- OGC. Indoor Mapping Data Format; Open Geospatial Consortium: Arlington, VA, USA, 2021; Available online: https://docs.ogc.org/cs/20-094/index.html (accessed on 3 March 2022).
- Goetz, M. Using Crowdsourced Indoor Geodata for the Creation of a Three-Dimensional Indoor Routing Web Application. Future Internet 2012, 4, 575–591. [Google Scholar] [CrossRef] [Green Version]
- GB/T 38630-2020; Information Technology—Real-Time Positioning—Multi-Source Fusion Positioning Data Interface. Standards Press of China: Beijing, China, 2020.
- GB/T 38627-2020; Information Technology—Real-Time Positioning—Magnetic Positioning Data Interface. Standards Press of China: Beijing, China, 2020.
- GB/T 35629-2017; Indoor and Outdoor Multi-Mode Cooperative Positioning Service Interface. Standards Press of China: Beijing, China, 2017.
- Open Geospatial Consortium. Web Services Common Standard. Available online: https://www.ogc.org/standards/common (accessed on 3 March 2022).
- OGC. Web Map Server Implementation Specification; Open Geospatial Consortium: Arlington, VA, USA, 2006; Available online: https://www.ogc.org/standards/wms (accessed on 3 March 2022).
- Open Geospatial Consortium. Web Feature Service 2.0 Interface Standard. Available online: https://www.ogc.org/standards/wfs (accessed on 3 March 2022).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Code | Name | Symbol |
|---|---|---|
| A.1.1 | exit |  |
| A.1.4 | stair |  |
| A.1.5 | elevator |  |
| A.1.6 | escalator |  |
| A.2.5 | parking |  |
| A.4.1.3 | ATM |  |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, Y.; Ai, H.; Deng, Z.; Gao, W.; Shang, J. An Overview of Indoor Positioning and Mapping Technology Standards. Standards 2022, 2, 157-183. https://doi.org/10.3390/standards2020012
Deng Y, Ai H, Deng Z, Gao W, Shang J. An Overview of Indoor Positioning and Mapping Technology Standards. Standards. 2022; 2(2):157-183. https://doi.org/10.3390/standards2020012
Chicago/Turabian StyleDeng, Yuejin, Haojun Ai, Zeyu Deng, Wenxiu Gao, and Jianga Shang. 2022. "An Overview of Indoor Positioning and Mapping Technology Standards" Standards 2, no. 2: 157-183. https://doi.org/10.3390/standards2020012
APA StyleDeng, Y., Ai, H., Deng, Z., Gao, W., & Shang, J. (2022). An Overview of Indoor Positioning and Mapping Technology Standards. Standards, 2(2), 157-183. https://doi.org/10.3390/standards2020012