1. Introduction
We are witnessing a new industrial revolution that has the potential to transform industries worldwide. This revolution ushers in an era in which a bridge is built between the physical and digital worlds, and human–machine interaction is enhanced through intelligent machines, mainly as artificial intelligence advances [
1]. This revolution, which altered all aspects of society, also altered business models. Many firms in the manufacturing and service industries are pursuing efficiency by optimizing their processes following digital technologies [
2]. It is true that automation has been used in manufacturing for quite some time [
3]. However, recent advances in robotics and artificial intelligence have also impacted the service sector [
4]. This has opened up enormous job opportunities for people [
5]. Artificial intelligence (AI) appears to be a crucial part of the revolution we referred to above because it enables machines to collect and process data without human intervention, allowing them to conduct tasks traditionally associated with human intelligence, such as making decisions and solving problems [
1].
Even though robots have been used in industry for some time now, it appears that the current state of robotics technology and other social developments in the world (such as COVID-19) will lead to even greater adoption of robots in the workplace [
3]. With the advent of Industry 4.0 and its accompanying technologies, such as the IoT, big data analytics, and cloud computing, all business procedures are rethought from the ground up. Robotics, automation, and AI have given businesses a leg up in the marketplace and helped them to stay in business [
6].
Forward-thinking businesses frequently adopt new processes and technologies, often as proactive marketing of new products, quality improvements, capacity increases, and investment in innovative processes. For optimal performance, these businesses require a wide range of technological tools [
7]. Companies gain a distinct competitive edge from robotic technology because of its increased productivity and adaptability in manufacturing and service [
6]. Innovative businesses are quicker to adopt new technologies. This innovation economy relies heavily on robotics, AI, machine learning, and large amounts of data, particularly in manufacturing [
7].
A new approach to using industrial robots has emerged that allows for completing previously reserved tasks while simultaneously increasing product quality and decreasing production costs [
8]. Human operators in manual manufacturing systems can use their perception, planning, and movement abilities to handle various tasks, tools, materials, and unforeseen changes. However, as physical, and mental fatigue set in, human operator performance typically declines across the board [
9]. To prevent accidents, robots in the conventional model of automation work in isolation within predetermined spaces [
10]. When producing and assembling complex products in small batches, the traditional business model’s inflexibility and accompanying higher costs are major drawbacks [
8]. In addition, when humans and robots work together, exhaustion is reduced. Industrial robots can continuously perform their programmed tasks with accuracy, speed, and repeatability that humans cannot achieve [
11], allowing businesses to increase quality and efficiency without sacrificing speed or adaptability.
The conventional model of industrial robot application has shifted from one in which robots work independently in a closed cell, to one in which they collaborate with humans [
10]. Robots can increasingly do jobs that were once thought possible only by humans, and they no longer must be big, inflexible, and mechanical-looking. This trend is expected to continue as technological developments in robotics make robots better suited to human-centered work environments, boost their ability to perform tasks that humans can, and familiarize the public with robots [
12].
One of the most critical factors in the widespread adoption of robots for various uses and tasks in the workplace is their ability to mimic human behavior. Studies of how humans and robots can effectively communicate and work together are expanding rapidly [
13]. People’s perspectives and actions in response to industrial robots can be understood through various innovation theories, such as the technology acceptance model, the innovation diffusion model, the reasoned action theory, the planned behavior theory, and the social-cognitive theory [
14]. Even though robots have not entirely replaced humans, as was once predicted [
13], there are still some serious concerns to be addressed, as robots are widely expected to become an integral part of the working world soon. These include people’s fears of robots [
15], people’s views on robots’ usefulness and ease of use [
16], and people’s plans for incorporating robotics into the workplace [
6]. As new robot technology could drastically alter the current business climate, it is expected that blue-collar workers may be resistant to this change. The adoption of robotic technologies in blue-collar jobs is primarily driven by people’s fear of automation and subsequent resistance to change [
17].
Using industrial robots in manufacturing has received much attention in recent years, and there has been much research on how humans respond to new technologies. The advantages of industrial robots, such as increased efficiency and reduced costs, have made them an attractive option for manufacturing operations. However, despite their benefits, the adoption of industrial robots is still limited due to negative attitudes toward robots, and far fewer studies have focused on how workers feel about robots in the workplace, especially considering recent advances in robotics. Negative attitudes can lead to resistance to change, which can hinder the adoption of industrial robots. To understand the abovementioned factors affecting the acceptance of industrial robots in manufacturing, we conducted an empirical study. This study aims to investigate the impact of negative attitudes on the acceptance of industrial robots. The following study questions were developed:
Section 2 of this research comprises a literature review.
Section 3 will go into detail about the materials and methods used. In
Section 4, we present the data analysis results from the survey. Finally,
Section 5 discusses the study’s findings, and
Section 6 concludes the paper with the study’s implications and limitations, and provides some suggestions for further research.
4. Results
Some demographic characteristics of the participants are given in
Table 1.
Before putting the research model to the test, we ensured the scales we were using were reliable and valid. To what extent the latent structure of the variables contributes to the total variance is indicated by the Kaiser–Meyer–Olkin (KMO) value. For adequate sampling, it needs to be as high as possible (>0.70) [
47]. Then, the research scales were examined for their construct validity and reliability. Exploratory and confirmatory factor analyses, as well as reliability analyses, were conducted for this purpose.
Table 2 displays the results of the EFA performed on the scales.
Except for the second and tenth items of the Trust in Industrial Human–Robot Collaboration factor, all factor loads were above 0.50. Here, we excluded them. Above 0.70 was the KMO value. Results from the Barlett sphericity test were found to be statistically significant. Since the sample size is large enough, factor analysis can be performed. The results showed that the various scales could account for more than half of the variation. Kurtosis and skewness values were calculated to be from −2 to +2. The data are normally distributed, as showed by this result.
The weighing scales were subjected to CFA after the EFA had been completed.
Table 3 displays the obtained goodness-of-fit values.
The results of the CFA indicated the scales had sufficient goodness of fit.
After completing EFA and CFA, the scales’ reliability was evaluated.
Table 4 displays the results of the reliability analysis and the component validity test, including the alpha coefficient value, average variance explained, and composite reliability.
Regarding reliability, the analysis yielded alpha values greater than 0.70. This result shows the validity of the scales. If the obtained AVE is greater than 0.50 and the CR is greater than 0.70, then the scales are valid and reliable.
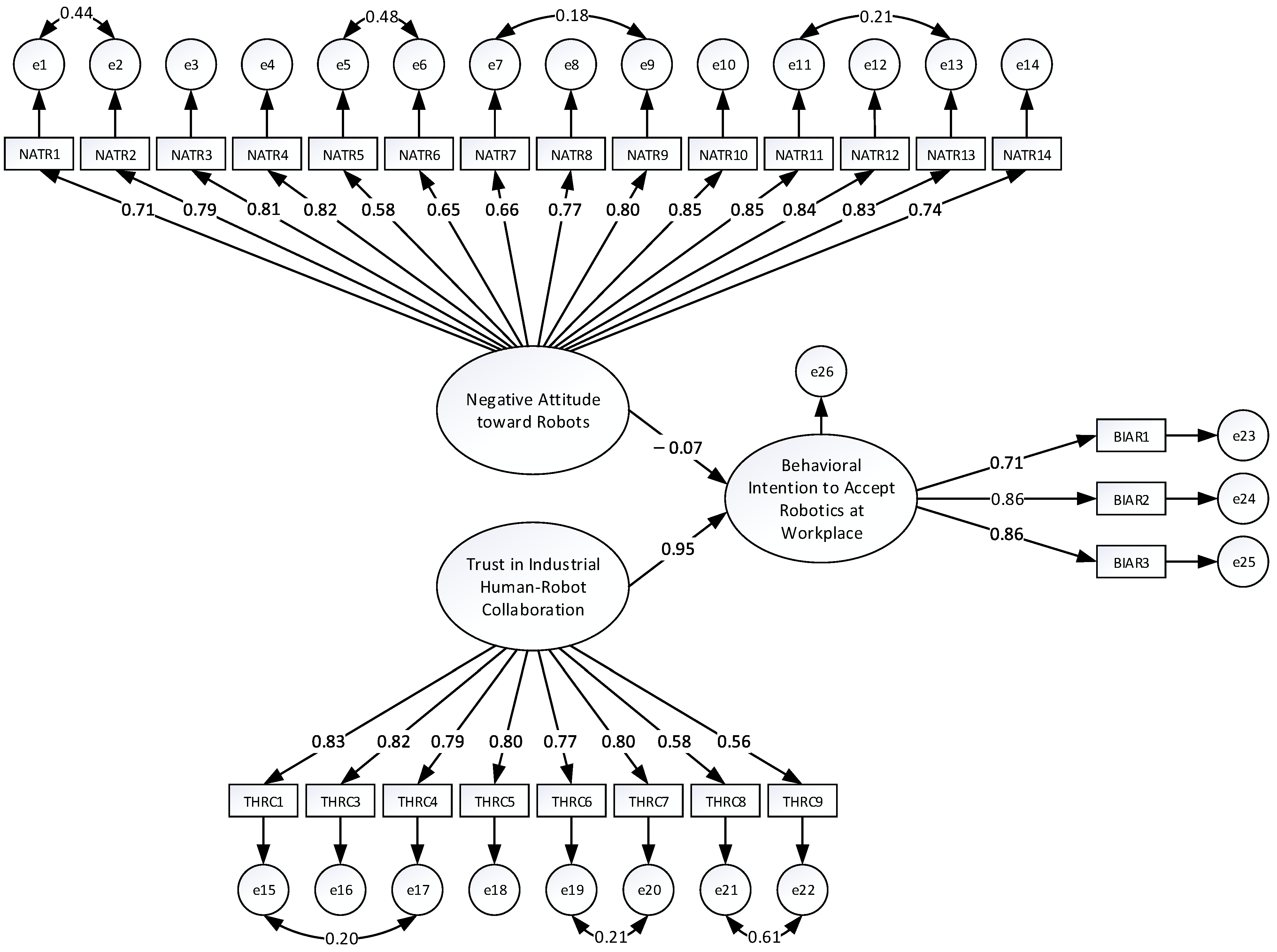
After completing the construct validity and reliability analyses, a structural equation model analysis was performed to test the hypotheses. The model under analysis is depicted in
Figure 2.
Table 5 displays the model’s goodness-of-fit statistics.
The analysis revealed that the model satisfied the necessary goodness-of-fit conditions.
Table 6 displays the outcomes of the model’s analysis.
The findings showed that negative attitudes toward robots had a negative effect on workers’ willingness to integrate them into their daily routines. Furthermore, trust in human–robot cooperation positively impacted behavioral intention toward acceptance of robots in the workplace. The data analysis verified both H1 and H2.
6. Conclusions
This study investigated the effects of employees’ negative attitudes towards industrial robots and their trust in human–robot cooperation on their intention to use industrial robots. As a result of the structural equation model analysis, it was determined that the negative attitudes toward robots significantly affected the intention to use them. It was found that trust in human–robot cooperation also significantly affects the intention to use them.
The results of the research show that the psychological state of employees in workplaces related to robot technology affects their level of use of this technology. This finding shows that different dynamics (employees’ attitudes and the confidence they feel), rarely mentioned in the literature, motivate and demotivate employees to use industrial robots. The findings of this study provide important insights for organizations seeking to adopt industrial robots in manufacturing. Negative attitudes towards robots can hinder their adoption, and organizations should take steps to address these attitudes. One way to address negative attitudes is to provide training and education to employees about the benefits of industrial robots. Trust in robots is also important for their acceptance, and organizations should focus on building trust among employees.
This study contributes essentially to the literature and differentiates it from existing studies. Companies that want to integrate robotic technologies into their processes should especially consider the psychological state of their employees. In order to ensure successful integration, training on industrial robots should be provided, and psychological support should be provided to the employees.
This research has several limitations. The most significant limitation of this study is the use of questionnaires to collect data, as the information obtained is limited to the questions asked. Getting the sample from a single country is another limitation of the study. This study is concentrated on the manufacturing sector. For future research, we propose reexamining the study variables and modeling samples from various developing countries and industries. In future studies, the effects of variables within the scope of technology acceptance models (such as performance expectancy, effort expectancy, social influence, perceived ease of use) on behavioral intention can be investigated. One of the limitations of this study is that the sample was determined from companies operating in the electronics and machinery manufacturing sector. In future studies, sectors such as the automotive sector, where the use of robots is quite intense, can be examined. When researchers with access to larger samples conduct cross-country comparisons, the cultural aspect of robot acceptance will become apparent. It is believed that country comparisons will make significant contributions to the literature. If we note another situation that can be considered as one of the limitations of the study, analyses related to demographic variables were excluded in order not to lose the focus of the study and because it could be the subject of another one. Future research could also investigate the impact of specific personalities on the acceptance of industrial robots in the context of human–robot collaboration. It would also be interesting to examine whether there are significant differences in robot acceptance between sexes and in connection with age and level of education. Finally, further research could focus on the emotional attachment of employees towards robots and how it affects their acceptance.






{kind=link}
{kind=link}

