1. Introduction
Digitalization has caused enormous changes on the way we work and live over the last ten years. Industry 4.0, the new industrial revolution, is blending the physical, digital and virtual worlds through numerous trends that collide with each other and create a huge transformation. Internet of Things (IoT) and Cloud Computing (CC) are two of these trends, which have also infiltrated logistics and material handling. Material handling involves the movement, storage and control of products and materials within the premises of a building or between a building and a transport vehicle, during the entire production, warehousing and disposal life cycle. Material handling processes play a vital part in logistics and supply chains, and usually involve a great deal of both manual labor and automated processes. Usually, material handling systems and processes are designed to enhance customer service, minimize inventories, shorten delivery times and reduce overall production, distribution and transportation costs. IoT and CC have been described as key developments in business technology that will reshape industries around the world [
1]. IoT refers to the interaction between objects and other devices and systems, which are Internet-enabled, and has largely emerged due to the powerful introduction of wireless technologies, sensors and the internet. According to [
2], the term IoT refers to robust connectivity between the digital and physical worlds, and is a technology that provides possible solutions to alter processes and functions of manufacturing, supply chain and logistics industries. Within the field of Material Handling, IoT provides extensive solutions for the operators and their customers. Integration of technologies such as Mobile and IoT contribute actively to linking devices through distributed logistics and supply chain processes to improve operational, efficiency and profitability-related solutions [
3]. Such solutions make products and services ‘smart’, which in turn frees humans from unnecessary work, since controlling many logistics activities is not needed anymore due to various automation solutions and systems that can plan and execute their workflow without human intervention or assistance. Cloud architecture on the other hand, is intended to provide users with on-demand tools such as storage, servers, network, software and services, through a network [
4]. CC usually provides services that are known with acronyms such as SaaS, PaaS and IaaS [
5]. SaaS (Software as a Service) offers software or applications to users. PaaS (Platform as a Service) provides a platform for the creation and delivery of software in the suitable programming languages, based on the organization’s processes. IaaS (Infrastructure as a Service) refers to the entire Information Technology (IT) infrastructure that includes the storage, servers and network [
6].
Although there is an increasing interest in Industry 4.0 technologies, such as IoT and CC, literature on how these affect material handling automation and intralogistics has been restricted up to now, especially when it comes to real-life application cases. Several reasons are deemed responsible for this underdevelopment. According to [
7], the lack of digital culture and training, clear digital operations vision and support and the unclear economic benefit of digital investments seem to be the most common inhibitors for companies to move towards the digital capabilities offered by IoT and Industry 4.0 technologies in general. As a result, previous studies highlight that Industry 4.0 is currently populated by small-scale test installations that try to depict real-life situations, thus lacking large-scale applications of its technologies in material handling and in-house logistics. Therefore, the impact of Industry 4.0 in the studied areas in terms of efficiency, flexibility and availability has not yet been tested in detail [
8]. This paper seeks to determine the present status of Cloud and IoT applications in material handling automation and intralogistics, analyze their impact and potential consequences and contribute with an actual case study of their application in an industrial setting, thus improving the practical knowledge of Industry 4.0, Cloud and IoT applications in relation to material handling and intralogistics.
This paper is organized in five discrete sections. The current one introduces the basic concepts and states the objectives of this paper.
Section 2 presents the detailed analysis of the collected material.
Section 3 discusses the review of collected material,
Section 4 presents the case study by providing an overview of the installation and its systems, and
Section 5 concludes the paper, by presenting the research contributions and limitations of this study.
2. Analysis
This paper attempts to provide an analysis and discussion of the impact and potential consequences of IoT and cloud applications on material handling automation and intralogistics. In doing so, the authors focus on material handling and discuss how IoT technologies and cloud applications affect its different elements through the reviewed literature. As far as methodology and statistics of this study is concerned, the initial sample of publications was selected through two discrete literature searches. The first one was made on the academic database of SCOPUS, but since the number of papers returned was rather small, a second search was decided to be made on Google Scholar. The search on SCOPUS database was divided in two parts and 131 papers were returned in total. For the first search, the language was set to English and all accessible records, such as reviews, journals and conference papers with no time constraints were included in the search space. The actual search was made using the following combinations of terms “Material Handling” AND “Cloud”, document type “ALL” and restricted in English language. The search returned 94 papers. The second search was made using the terms “Material Handling” AND “IoT” for year > 2009, document type “ALL” and restricted in English language. The search returned 37 papers.
Since the total number of papers returned, constituted an insufficient representative sample for our study, an additional search was decided, which took place on Google Scholar. Two sub-searches were also made, with the first one combining the terms “Material Handling” AND “Cloud”, for year >2009 and restricted in English language. This returned 4220 results. The second search was made combining the terms “Material Handling” AND “IoT”, for year >2009 and restricted in English language. This returned 1640 results.
Following the searches, a screening method was implemented, with the exclusion criteria being, (a) duplicate papers, such as conference papers subsequently transformed into journals, (b) contributions that had the keyword string requirements but did not directly deal with the topic, and (c) papers that contribute marginally to this study. For this final category, the writers debated each paper judiciously and then either excluded it from the final sample or retained it for further assessment. Finally, forty-nine (49) papers were chosen for further in-depth assessment due to this process, which will be analyzed below and further discussed in the following section. The literature reviewed showed that main topics of discussion, regarding IoT and cloud technologies that we investigate, were usage on products and warehouse equipment such as Automated Guided Vehicles (AGVs), smart bins and racking, fault detection and performance analysis of warehouse systems, and shared services through the cloud.
According to [
9], integrating embedded devices into current systems is the first move towards transforming classic warehouses into flexible modular systems with improved performance. However, the full potential of IoT will be achieved when these systems will be able to communicate with each other and carry out their activities autonomously, without any middle or central management units. Based on [
10], with advancements in IoT and cloud, every component within warehouses, such as forklift trucks, industrial robots, and operators via their smart tablets or PDAs, will be represented as individual software agents in the cloud. By being interconnected, they will be able to make their own decisions and, therefore, existing hierarchical control systems will eventually be replaced by decentralized network-like control architectures. The works of [
11] mention that cloud architecture provides many advantages on robotics and automation systems and can be split into two complementary levels, which are machine-to-cloud (M2C) and machine-to-machine (M2M). Computing and storage resources can be transferred to servers in the cloud at the M2C communication level, which on one hand minimizes costs, but also provides almost infinite power to the robots since central processing power can be used, and stored information can be shared with other robots for training and learning purposes. On the M2M communication level, robots interact via wireless links to form a collaborative computerized smart factory with computing capabilities pooled from individual robots and creating a virtual ad hoc cloud infrastructure and information exchanged among the collaborative computing units for synergetic decision generation.
According to [
12], IoT technology can be of significant aid to enable a ‘smart’ AGV system. Smart factory requires efficient and accurate monitoring of objects, so IoT technologies such as RFID (Radio Frequency Identification) is widely used in warehouse shop-floors. This allows for real-time status input from each AGV unit that offers an opportunity to improve accuracy and time efficiency in logistics scheduling and inventory management tasks. Based on [
13], a cloud robotics architecture that provides multiple functionalities to enable enhanced collaboration of AGV groups used in industrial logistics is presented. According to this architecture, a global live view of the environment is established, containing information about all entities in the industrial setting, which is then used to improve the local sensing capabilities of AGVs, thereby the efficiency and flexibility of AGV motion coordination. It is evident that the essence of cloud and its advantages is gathering data from various sources and providing global information to local devices.
Maintenance of machinery and warehouse equipment plays an important role in today’s automated warehouse environments, which directly affects the service life and efficiency of the equipment [
14]. Modern intralogistics systems tend to be complex in operation and large in scale. Therefore, a principal concern is to enhance system robustness and consistency. This could be achieved by a context-aware supervision system, as mentioned in [
15], where an intelligent system with integration of semantic web and agent technology is proposed that aims at offering Condition Based Monitoring and Condition Based Maintenance (CBM) decisions to the relevant user. According to [
16], IoT technology is found to be more effective in maintaining Material Handling Equipment (MHE) in the warehouse due to an array of capabilities such as real-time visibility, smart decision through reacting to errors and faults and therefore reducing or even preventing downtime, and customizable KPI’s that support timely decision making. Based on [
17], maintainability and sustainability of systems and processes in logistics and manufacturing can be improved by cloud services and resource virtualization. These two, are vital parts for implementing Cyber Physical Systems (CPS) and Industrial IoT (IIoT), which are the main building blocks of Industry 4.0. Effectively, combining local computing capabilities with global computing capabilities is possible through resource virtualization of shop-floor devices enabled by IIoT technology, which seamlessly incorporates smart connected objects into the cloud.
Another theme often discussed in the literature is the Physical Internet (PI) or Physical Web. PI is referred to devices that are part of the IoT and that are directly accessible, tracked or regulated by web technologies [
18]. In the PI, individuals, locations, and objects have web pages for providing user experience information and mechanisms. For instance, with web search engines, where a user query returns links to related material, the PI will also return search results, ranked not only by traditional ranking algorithms, but also by proximity, and therefore results may be shown as lists, enhanced charts, or even floor plans, since the Physical Internet is something that one can see, hear, and touch, like for example a TV, a thermostat, a router or a home audio system. The concept of PI and its connection to Industry 4.0 is also addressed in other papers. According to [
19], PI involves interconnected logistics in the context of creating an effective, sustainable, responsive, adaptable and scalable open global logistics network based on physical, digital and operational interconnectivity via encapsulation, interfaces and protocols. Therefore, the key word for the concept of PI is universal interconnectivity. This denotes complete collaboration between all supply chain members, complete compatibility with all relevant technical-technological tools and solutions and optimal execution of all operations. Physical interconnectivity is achieved when each object has a unique worldwide identifier and smart tag as an element of the IoT [
20].
4. An Industrial IoT Application
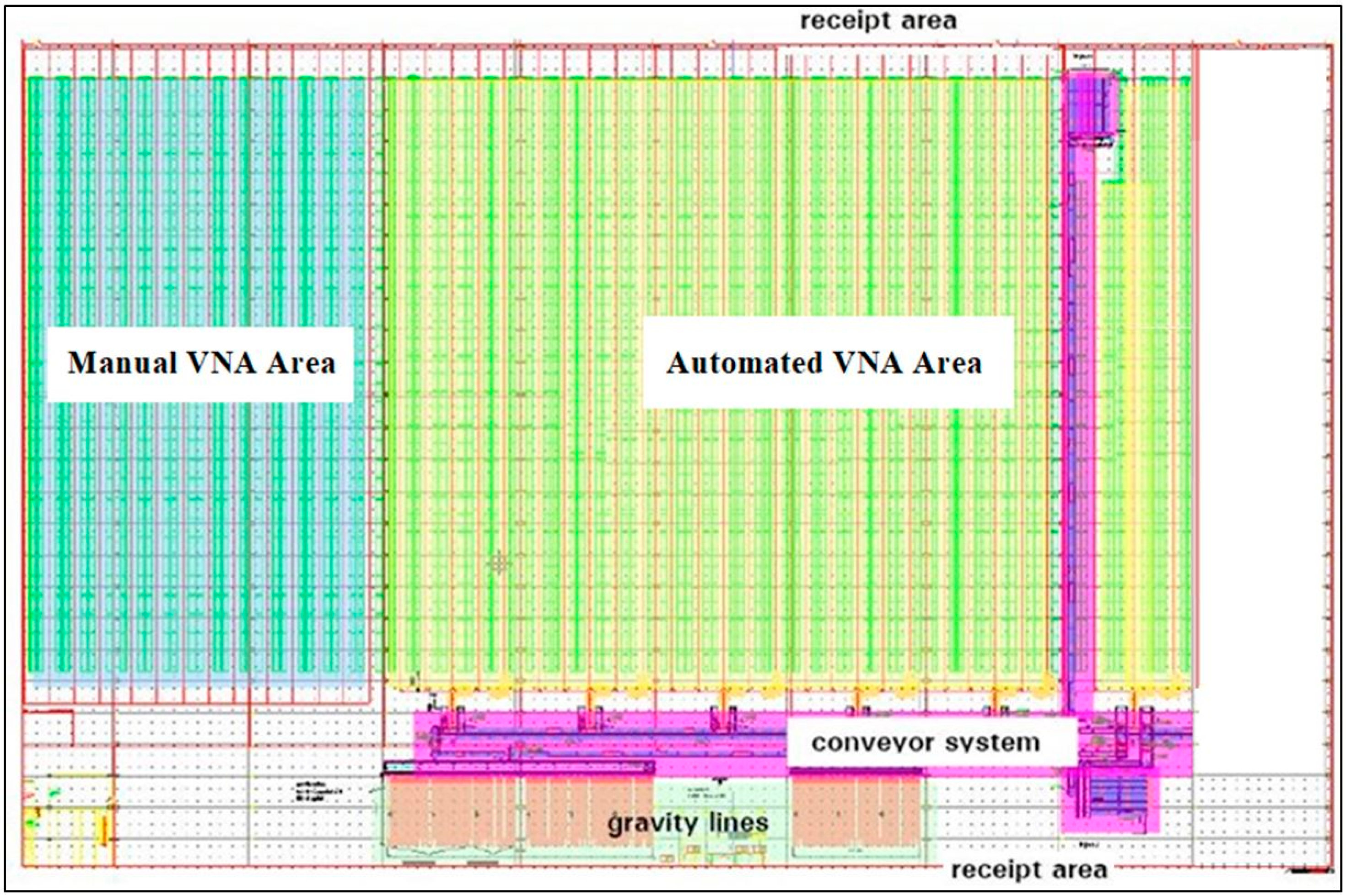
As noted in the introduction, the reporting in literature of real-life applications of IoT and cloud systems to support material handling and intralogistics in general, is rather limited. This paper attempts to contribute by presenting the case study of a large Distribution Center that supplies retail home furnishing and sporting goods products to stores in five countries in the Balkan region. This DC runs two different automation systems with AGVs, shuttles and conveyors that are equipped with IoT technology. For the retail home furnishing part of business, a pallet automation system is used with 600 m of conveyors, two input stations, four transfer cars, five pick and delivery stations, eight automated Very Narrow Aisle (VNA) forklifts and three sets of flow racks with 108 gravity lines in total. A general layout of the plant is seen on
Figure 1 below.
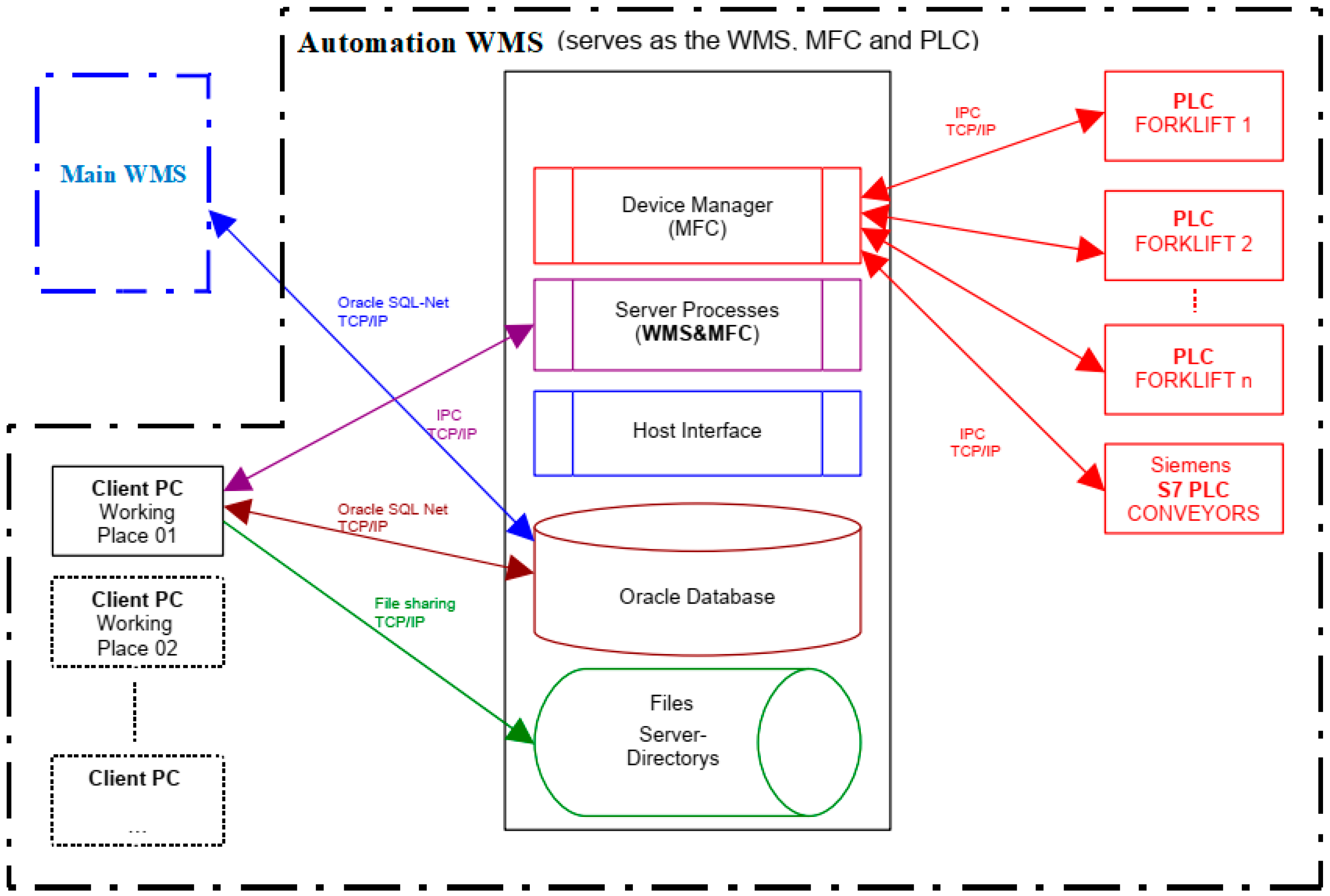
On the manual VNA area, VNA trucks operate on typical back-to-back pallet racks and are supported by the main WMS of the plant. On the automated VNA area, similar back-to-back pallet racks exist, but the operation is handled by eight fully automated VNA trucks. The trucks are fitted with a Wi-Fi antenna that communicates via TCP/IP protocol with the Material Flow Controller (MFC) system. A rough system overview can be seen on
Figure 2 below.
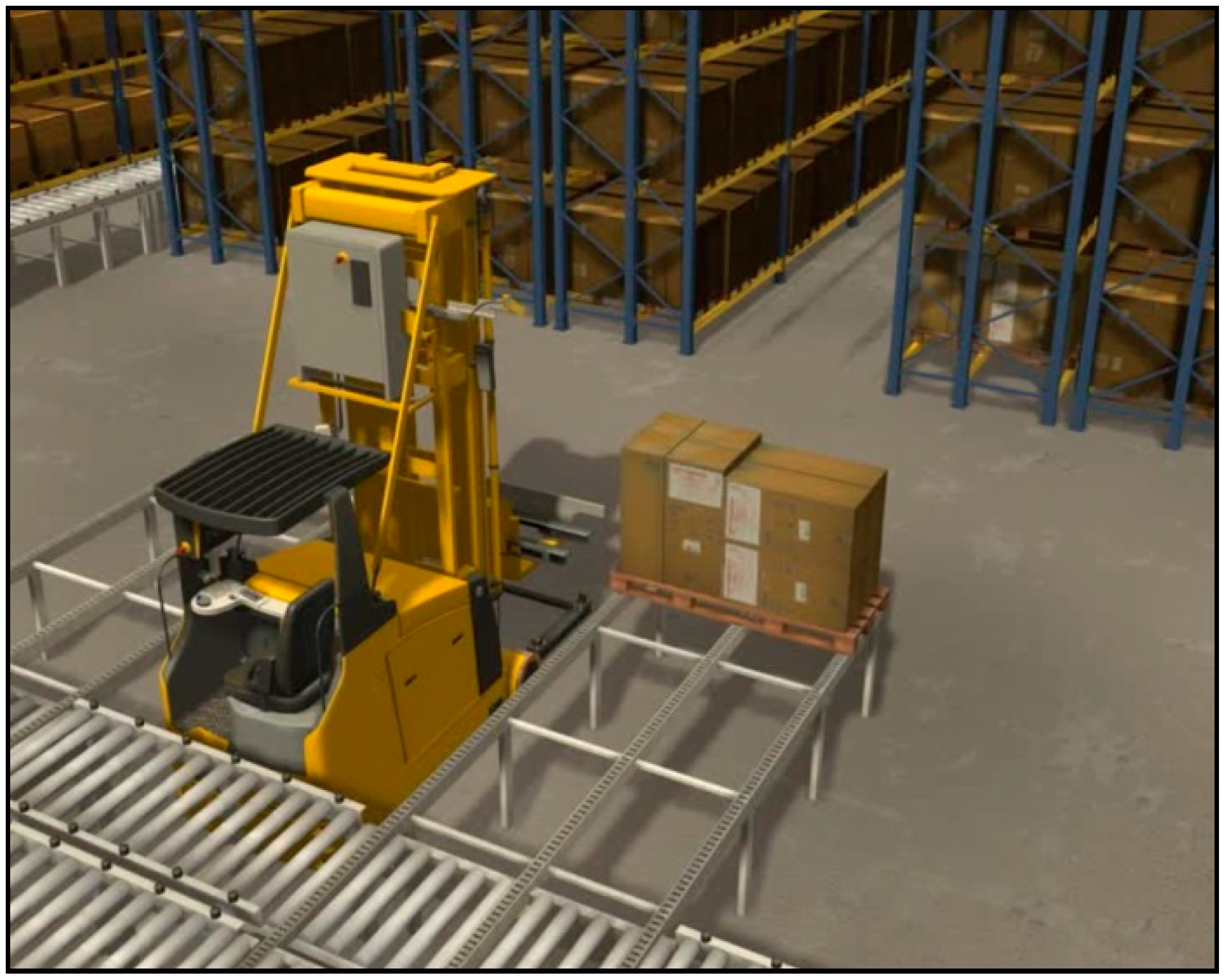
Each truck and conveyor section of the system communicates via Industrial Ethernet with the MFC/WMS and receives and sends all automatic instructions. The floor of the installation is fitted with five different frequency cables that are connected to a frequency converter, which allows the trucks to move in automatic mode with active enable frequency. Each truck is also fitted with fourteen different sensors in order to be able to pick up and deposit a pallet without causing damage to the products. The operation of the automated VNA area is divided in two types of pallet size. One is the normal EURO pallet (1200 mm × 800 mm) and the other is a EURO-Long pallet (2000 mm × 800 mm), which is a special type of pallet used for longer furniture. In the installation, there are eight automated forklifts installed in total, six for EURO pallets and two for EURO-Long pallets. Regarding the picking process, orders are picked by the forklifts, according to specific priorities and algorithms. Pallets are placed by the forklifts to the Pick and Delivery stations, which are in turn connected to the conveyor system. The conveyor system will then shift the pallet to the allocated gravity line and a stock movement message will be reported to the WMS, when the pallet arrives at the gravity line. A view of an automated truck and a Pick and Delivery station can be seen in
Figure 3 below.
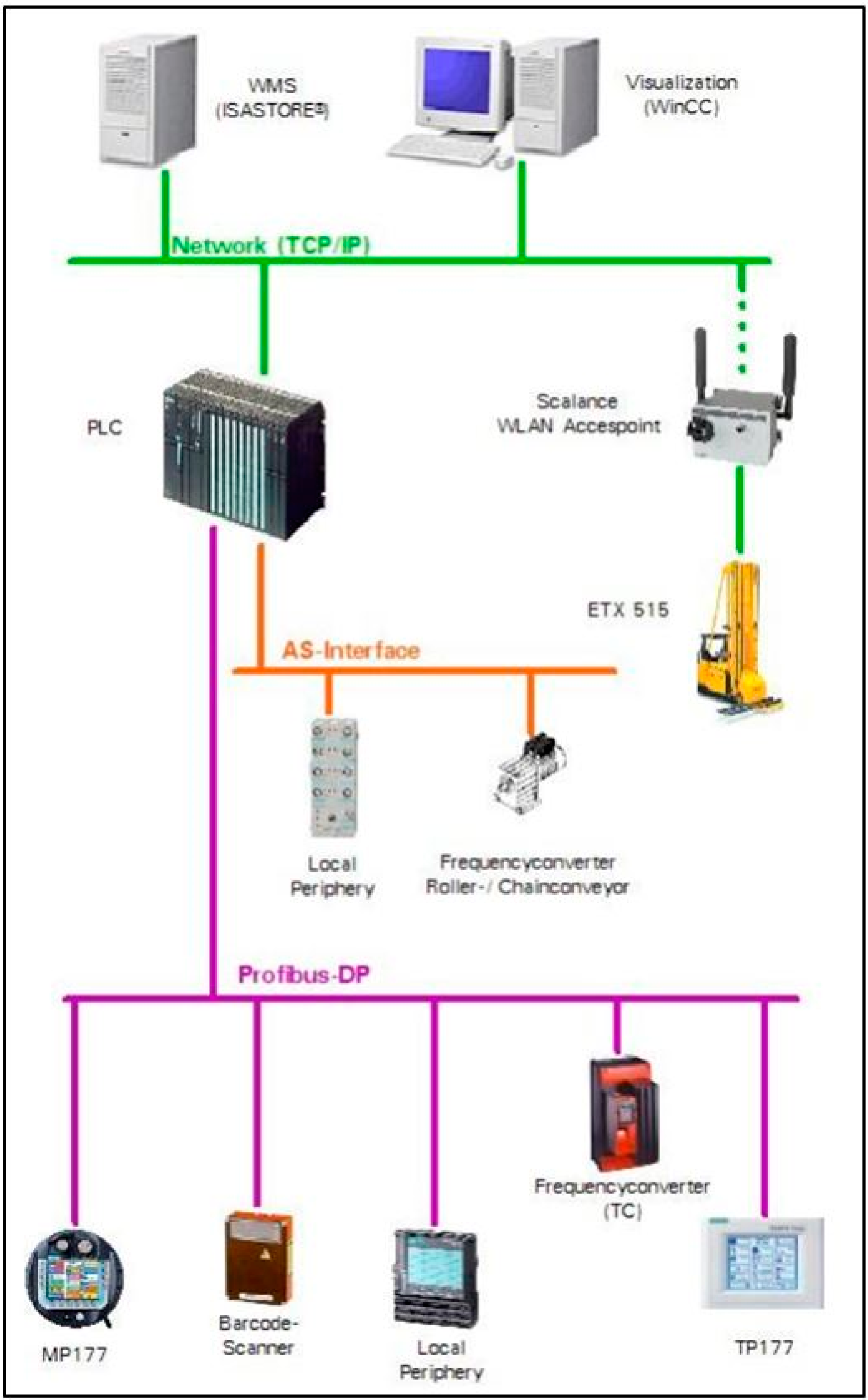
For the conveyor system, which is responsible for shifting pallets in and out of the warehouse, a Siemens control system (PLC) type S7 CPU416-2DP is used. Live plant information is shown through WinCC, a plant visualization software by Siemens S.A. Access to the control system is made through TCP/IP. Peripheral equipment such as light barriers, frequency converters, control panels, etc., are connected to the control system via AS-Interface and Profibus-DP. Actuator Sensor Interface (AS-Interface) is an industrial networking solution with physical layer, protocol and data access methods that is used in PLC-based automation systems, for connecting devices such as rotary encoders, sensors, actuators, push buttons and analog inputs and outputs. Profibus Decentralized Peripherals (Profibus-DP) is used in automation applications in order to operate actuators and sensors via a centralized controller. Data exchange with the automated trucks in the pallet warehouse is made by the internal Wireless LAN (TCP/IP), directly with the Siemens standard functions. A Scalance WLAN Access-point is installed in all trucks and communication with the WMS is achieved by internal network, through protocol RFC 1006. A visual representation can be seen in
Figure 4.
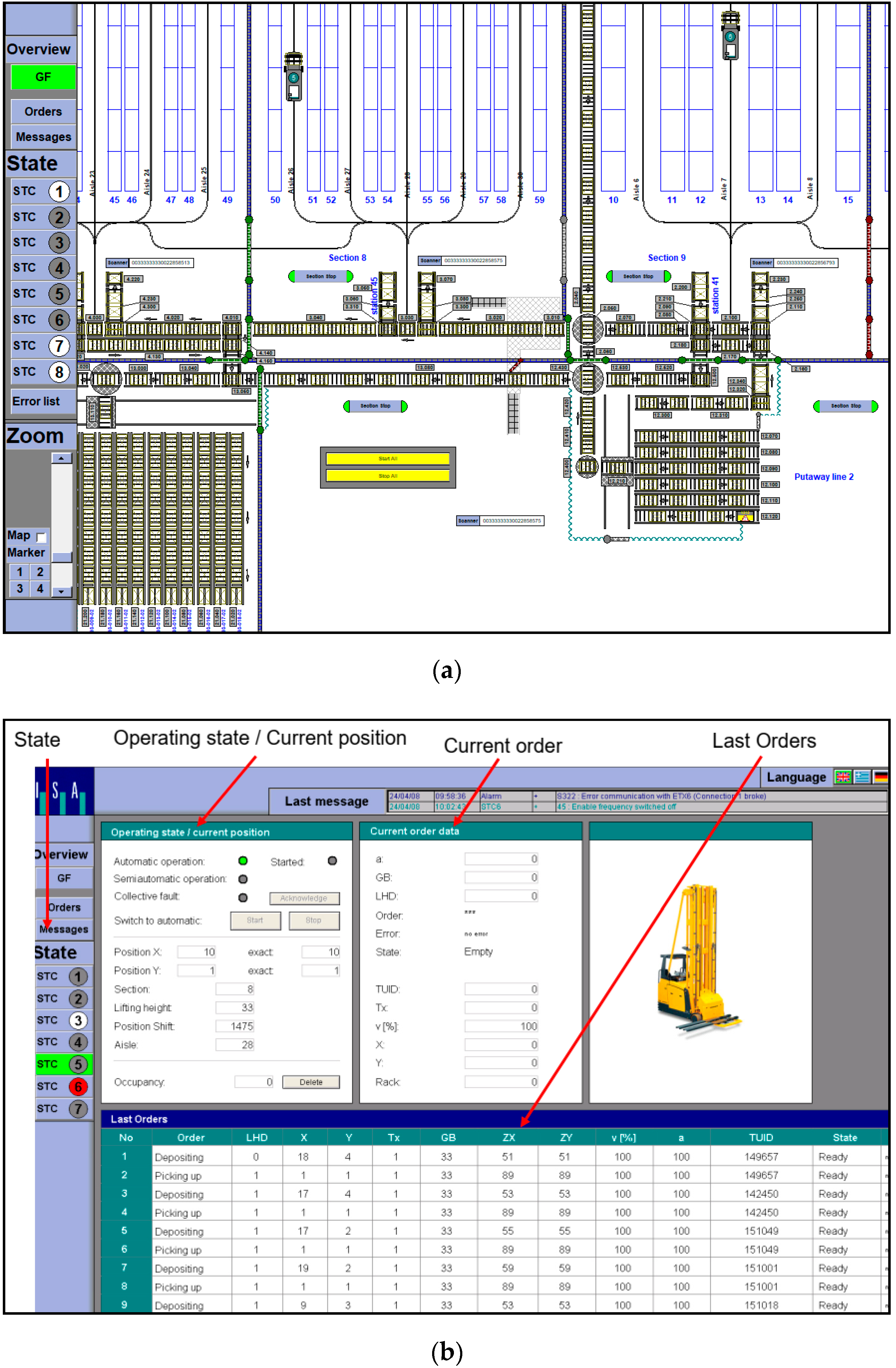
The output of the system is three sets of flow racks (gravity lines). This is the area, where all the pallets arrive after being retrieved from the automatic warehouse. Each gravity line represents one location in the warehouse modelling. The maximum number of pallets which can be stored into the gravity lines is 972. Plant Visualization is realized with the WinCC visualization software, as mentioned earlier. Plant visualization represents an image of the plant, with several pictures being used to get useful partial views of the plant. The status, automatic and manual mode, of all conveyor elements is visualized, and also all pallets moving on the system are displayed, together with their respective information, such as ID number, transport destination, transport status, etc. Fault messages are presented together with their status and everything is logged in an archive. In
Figure 5, some examples of the plant visualization are presented (
Figure 5a), together with the interface that is used by the users (
Figure 5b).
In order to describe the real flow of goods and the various interactions, communications and control among the various elements of the system, when a pallet enters the system through one of the input stations and has passed the required size and weight criteria, the system transports it towards the corresponding area (i.e., EURO or EURO-Long). On specific points of the conveyor in these areas the WMS decides on the exact storage location of the pallet on the automated racking, according to workload and availability of the automated trucks. The pallet then enters the Pick and Delivery Station of the section that it will be stored and the truck receives a signal from the conveyor to come and pick it up. When the truck picks up the pallet, it transports it to the required location and deposits it. As soon as the movement is completed correctly, the WMS is informed and the truck continues towards its next assignment (i.e., to pick up a pallet from the rack and move it to the conveyor, or pick up another pallet from the conveyor for storage on the pallet rack). Communication for the movement of pallets throughout the conveyors is achieved by light sensors and barcode scanners. That means that when a pallet moves on the conveyor, the system knows its location by the light-barriers attached every few meters, and when there is a change in direction, then a barcode scanner exists that reads the barcode of the pallet and decides where to move it.
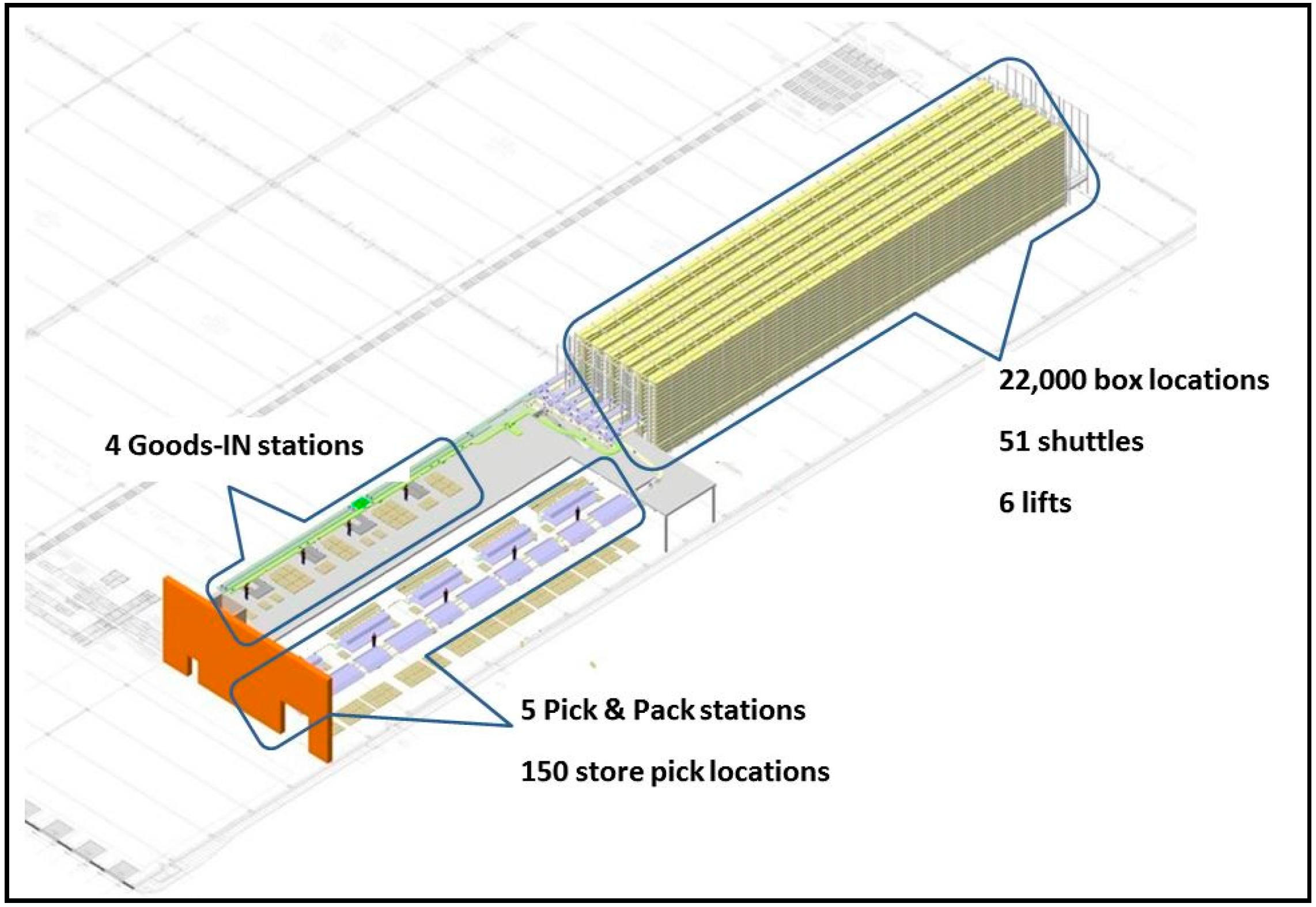
Regarding the retail sporting goods part of business, a box automation system is used, that is comprised from (a) an automated racking system of 22,000 box locations that operates with 6 high speed lift platforms and 51 automated shuttles, (b) five Goods-to-Person stations with 150 flow rack (store) locations and pick-to-light operation, and (c) 500 m of conveying system for transporting boxes between automated racking and Goods-to-Person stations. A general layout of the system can be seen in
Figure 6 below.
KiSoft WCS serves as the Warehouse Control System (WCS). The storage procedure is performed by filling plastic system containers and placing them on the conveyor system at the Goods-IN workstations. A storage order containing all information (i.e., order number, container number, articles, quantity, etc.) is transmitted by the WMS to the WCS for the storage containers to be stored in the shuttle system. The storage of the container into one of the rack lines is carried out by the shuttles. For the picking procedure, containers are automatically transported from the stock locations within the racking of the shuttle system to the pick and pack stations. Orders are transmitted from the WMS to the WCS, and as soon as the containers reach the pick stations, the pick-to-light displays indicate the number and target position of the products for picking to the warehouse worker.
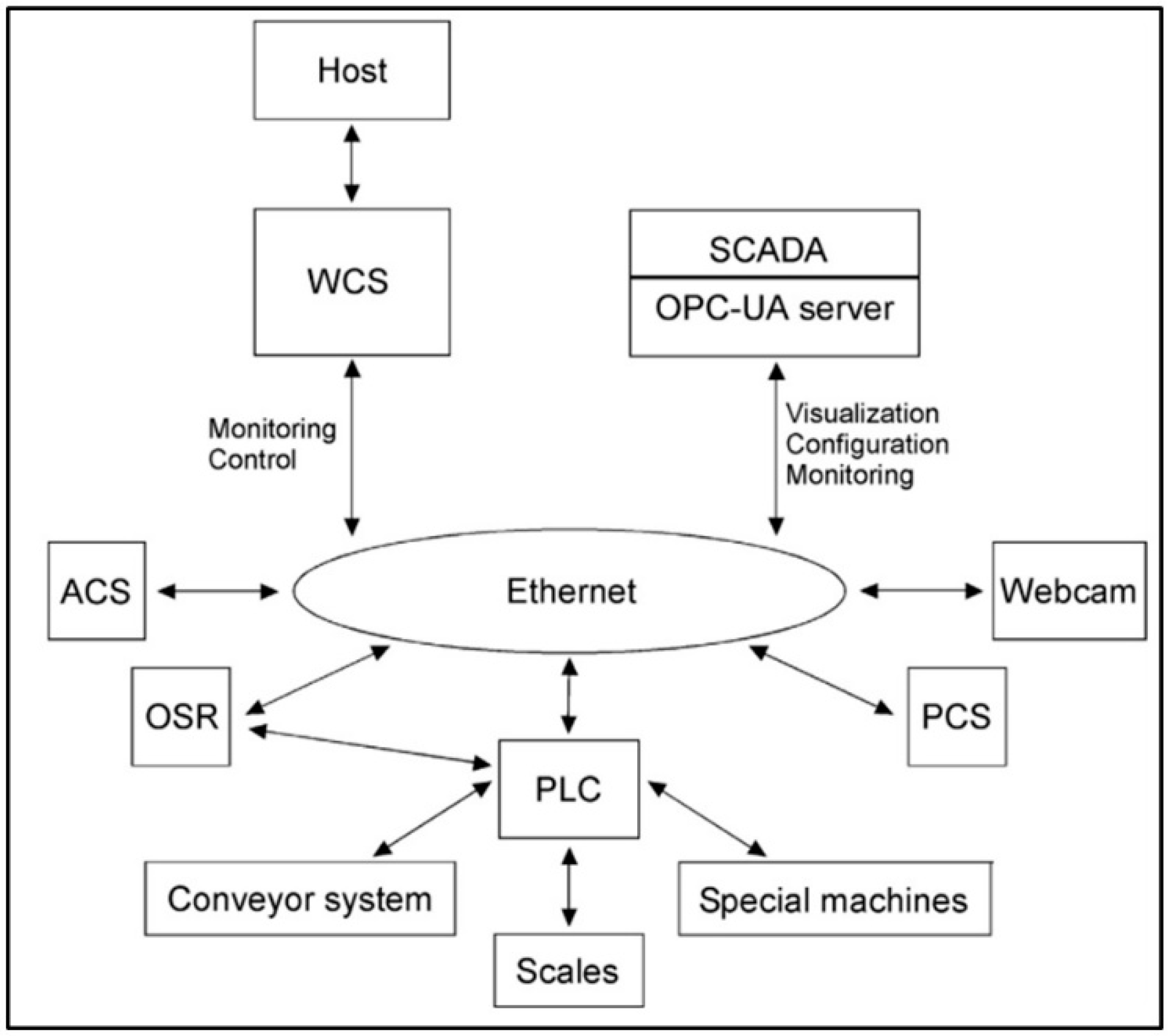
The visualization of the automation system is performed by the SCADA software. With this software, the entire warehouse can be monitored, and individual warehouse areas can be started and stopped. SCADA is used for actions such as starting and stopping the conveyor system and electronics for individual warehouse areas, displaying and exporting active and archived messages, confirming error messages, and displaying and exporting statistics. It is installed on a server or computer that assumes the function of the server. The user calls up its GUI through a client. Any hardware device in the warehouse that connects through a web browser to the SCADA server is referred to as a client. The client must have a network connection to the SCADA server. Working with SCADA is possible with every hardware device that has a functioning web browser (Internet Explorer, Firefox, Chrome, etc.). OPC-UA comprises the interface between SCADA and the systems that are visualized on the GUI. Through the SCADA’s GUI, all error messages of conveyors are displayed, which are then used by the company for further analysis, as is explained later on.
Figure 7 shows the communication interfaces.
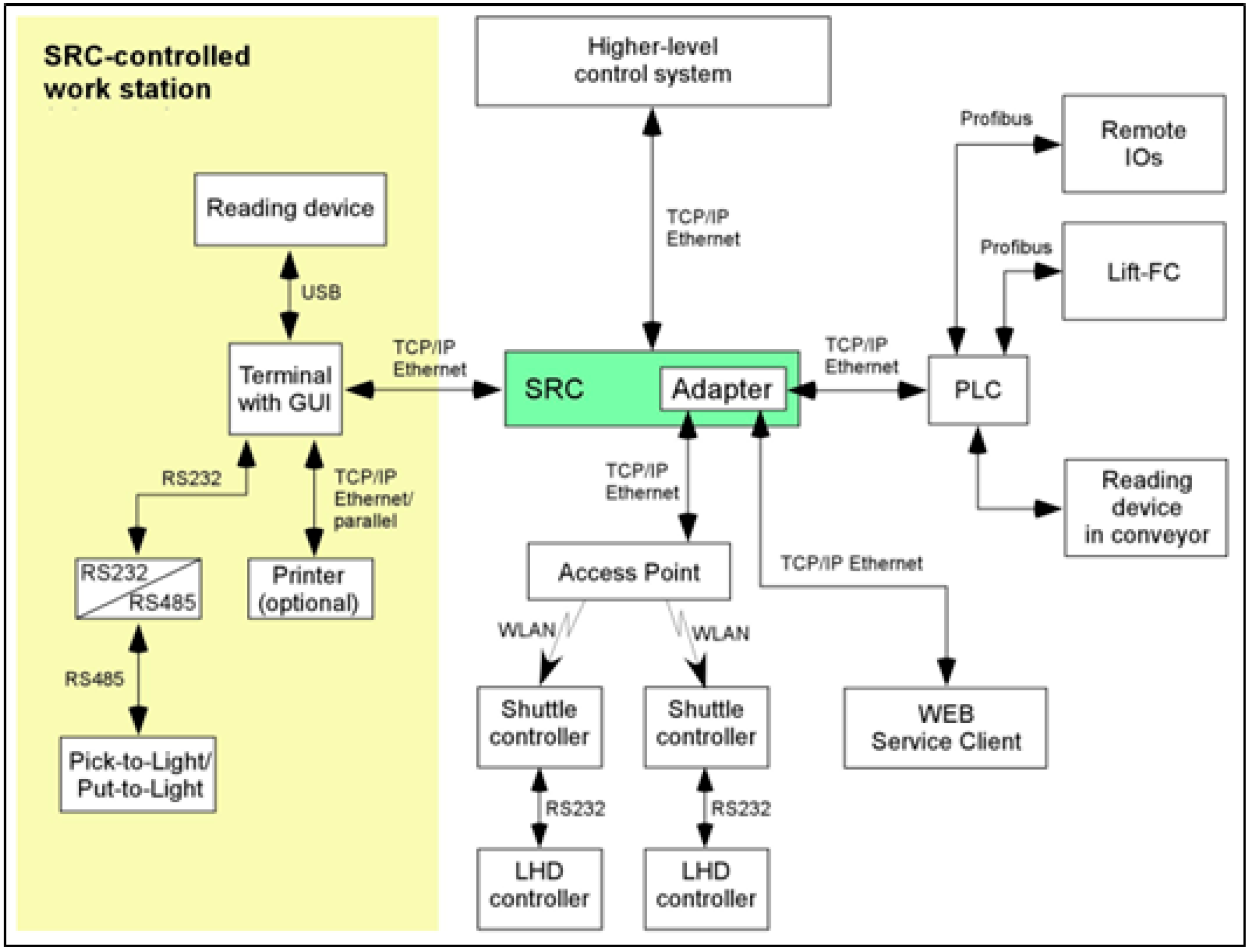
Service Client is the system used for checking and manually controlling the shuttles and lift platforms of the storage and picking system. This is a web-based client server application that permits actions such as monitoring the system status and the execution of processes, testing and referencing shuttles and lifts, enabling, disabling or suspending individual components or areas and accessing information concerning previous actions and states. The Service Client is called up through a web browser and is therefore available wherever a connection to the web server is possible. It is installed on the server of the storage and picking system.
Figure 8 indicates the communication interfaces at the shuttle. The interface to the master control system is realized with the Storage and Retrieval Controller (SRC).
Through the Service Client software, all error messages of shuttles and lifts are displayed, which are then used by the company for further analysis. Finally, there is one other program, SRC Reports that visualizes warehouse data and is used to influence work process of the warehouse system controlled by SRC. The software is a web application, installed on the SRC server and runs in combination with a database. It is mainly used for actions such as statistics and reports, displaying orders, products, system containers and storage locations with all the associated information, creating picking and inventory orders and displaying operational states.
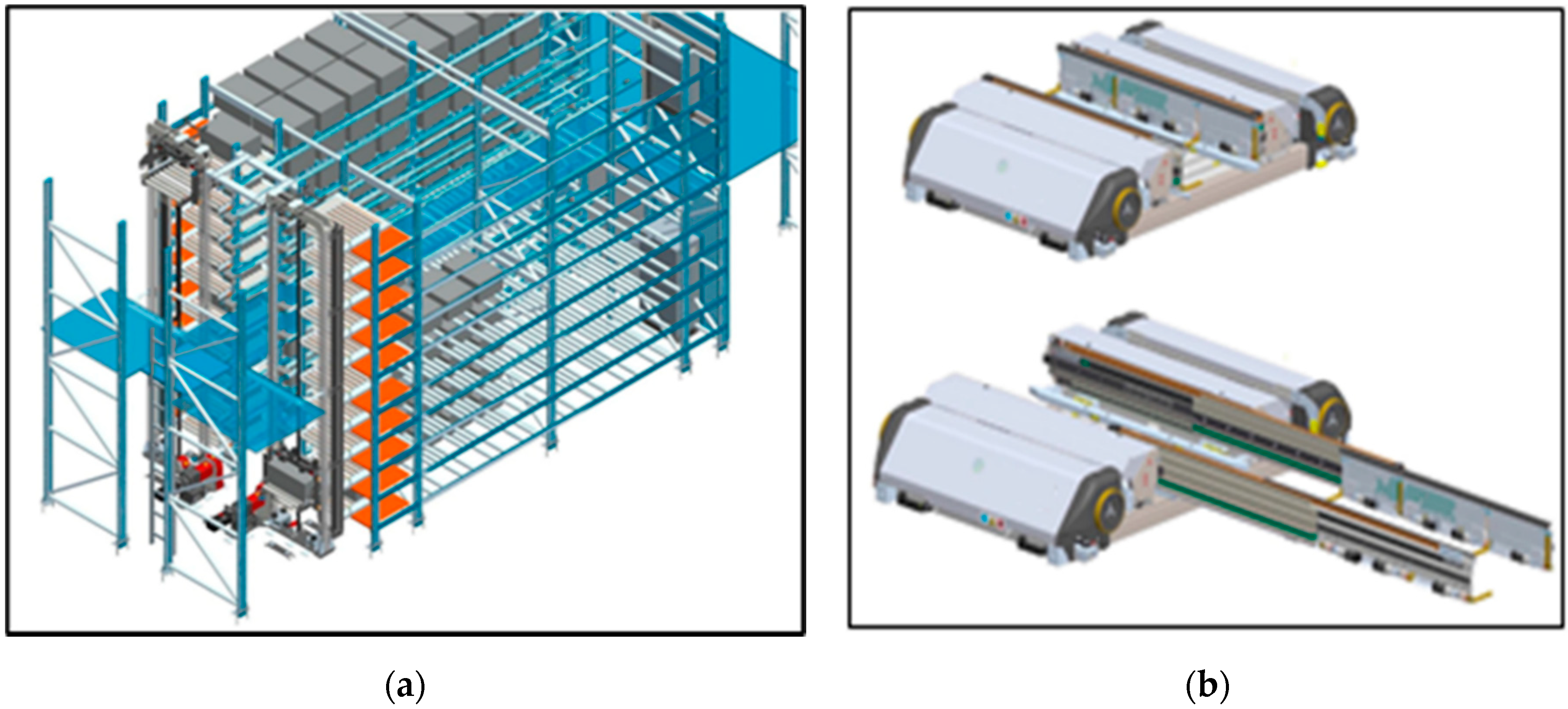
As mentioned previously, the system uses shuttles and lifts in order to move storage containers within the automated racking system. Each level has a shuttle that moves containers horizontally within the level. Overall, there are 51 shuttles operating in the system. For the movement between the different levels of shuttles, there are six lifts installed. Each lift can move one container at a time to the corresponding level.
Figure 9a depicts an example of the racking system structure, while the shuttle used for moving the containers within the same level, is depicted in
Figure 9b. The orders are transmitted through WLAN from the SRC to the shuttles. Within the racking system, there are access points on specific locations.
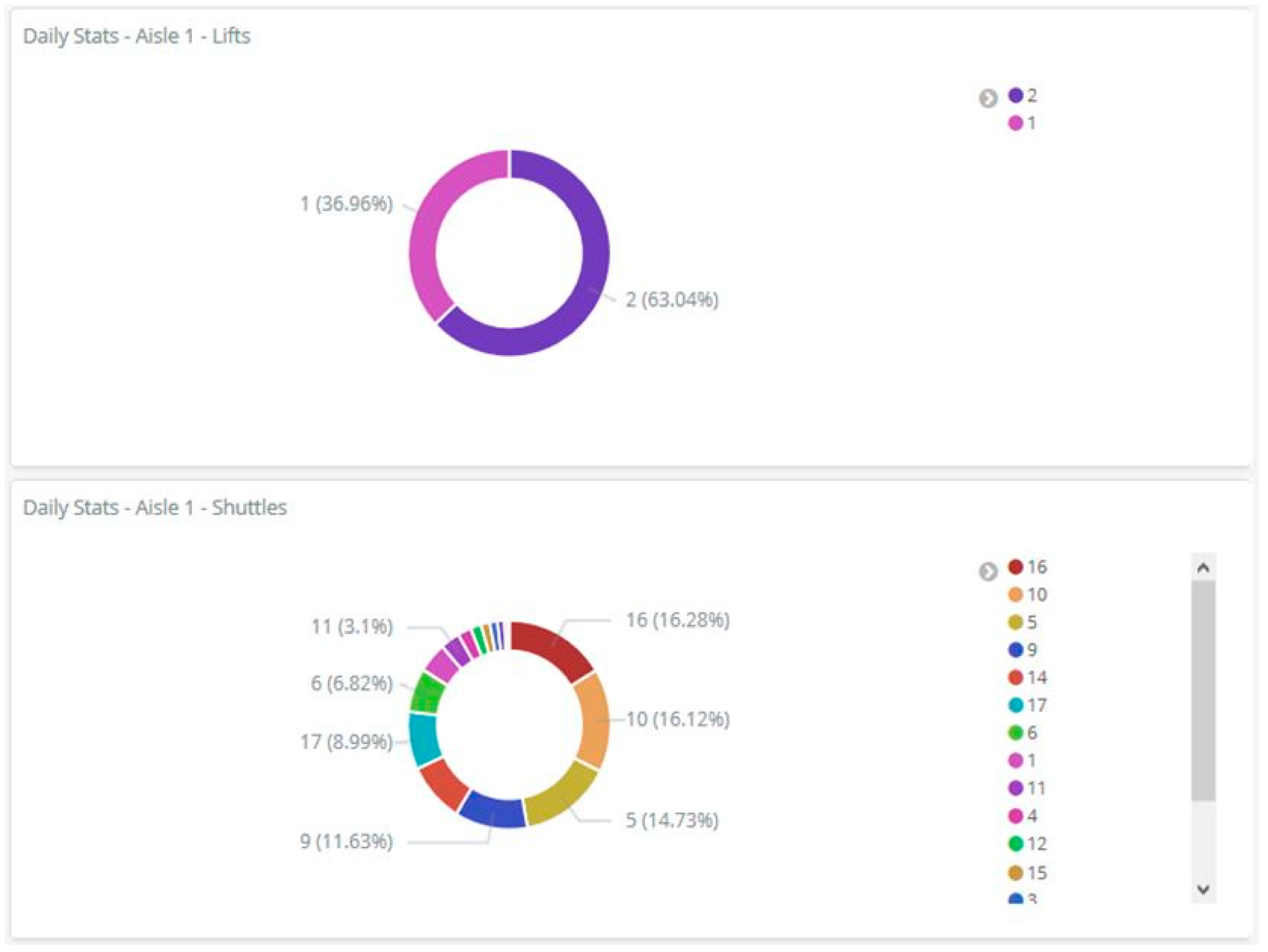
For measuring performance and keeping track of the maintenance needs of both automation systems, all error messages from VNAs, shuttles, lifts and conveyors are recorded and analyzed through Kibana, a data analytics and visualization platform. Within this platform, system messages are categorized according to the system and division they belong to, and, therefore, it is easy for the technical team of the company to observe abnormalities and possible problems on the various system components. Visualization of the error messages is done either with pie charts, graphs, or simply list of messages, as seen on examples on
Figure 10. Through this data analysis, reacting to errors and faults on the systems, according to specified monitored parameters, is quick, and therefore the overall performance of the system is maintained at a high level.
5. Conclusions
Industry 4.0 and its technologies are rapidly reshaping our world today. Our daily routines are very different to what they were ten years ago. The way we live and consume is constantly enriched with additional digital and virtual aspects. The same change takes place in our working environments. Logistics, including material handling and intralogistics, both as a science and an economic sector, not only does not lack behind, but rather drives the application and development of basic methods, algorithms and technologies. According to the literature reviewed, we comprehend that massive changes are underway for warehouses and intralogistics facilities. Intelligent automation is gradually replacing monotonous and strenuous activities, mainly due to the need for speed and precision, but also due to the lack of blue-collar workforce, especially in developed countries. Advancements in the areas of goods movement and order picking within warehouses have been substantial within the last decade, with fleets of AGVs becoming more autonomous in their movement around the warehouse space, and picking robots and robotic arms becoming more and more capable of handling various types of goods and materials. Cloud computing has also greatly assisted in improving the performance of AGV fleets and robots by allowing them to share their knowledge outside the four walls of the warehouse and reach similar types of installations worldwide. Furthermore, the ability to handle more complicated activities is made possible due to the fact that stand alone machines do not need to have large processing power to analyze collected data, since central processing devices can do it for them through the cloud and then provide the solution/action which is needed to be performed. Swarms of intelligent AGVs and robots is the foreseeable future for intralogistics and warehousing, with almost no need for human interference between goods-in and goods-out, since all activities will be assigned automatically to the most suitable device within the installation. However, there is still some distance to be covered in order for such a state to become the mainstream. Prototypes need to be further tested in regard to both complexity and size, but most importantly they need to become durable enough in order to be able to withstand the harsh environment and treatment that exists within a warehouse space.
In this paper, an analysis of Cloud and IoT technologies is presented in an attempt to understand their effect on material handling automation and intralogistics. The literature study shows that the subject area is currently dominated by small-scale research facilities that aim to represent real-life scenarios and thus lack large-scale implementations of their innovations in material handling and intralogistics. Consequently, the current status of cloud and IoT technologies in the areas under review in terms of performance, flexibility and availability has not yet been thoroughly tested. This lag between theoretical advancements and practical implementations, as discussed earlier, is not exclusively the result of the technology complexity and poor or underdeveloped prototyping. There is still much road to be travelled when it comes to ‘softer’ issues, such as the management culture, the workforce expertise and investment mindset and behavior. This paper attempted to showcase an actual successful implementation of an IoT-Cloud application in an international logistics company with two set objectives. The first was to provide an adequate level of details on technical information in order to prove that the complex nature of such installations can be decomposed in actual manageable chunks, which are logically interconnected into a quite straightforward system. The second objective was to highlight a successful case study of an IoT-Cloud implementation in the area of Intralogistics, in order to create the necessary motivation capable of alleviating management reservations and trigger an initial interest on the subject, which eventually will lead to an increased number of technology adaptors.
Finally, this study has some inherent limitations. First of all, evaluating the inclusion/exclusion criteria was a rather cumbersome and copious process. As a result, it is possible that there are several useful publications that have been excluded from the sample. For this, the authors a priori apologize to their colleagues if such an eventuality has occurred. Second, we must notice that the choice of language limits the findings of our research, as it is anticipated that a significant number of publications would use a language other than English, especially in German or Chinese, where a considerable number of authors have been identified. Lastly, the presentation of a single case study permits the authors from generalizing identified phenomena and firmly connecting the case results with the theoretical findings. Actually, recording and debriefing more practical IoT implementations is one of the items the authors have on their future research agenda, which also includes the development of a technology and process reference model for supporting Industry 4.0 implementations in contemporary logistics and the authoring of a roadmap document, providing methods, tools and technologies to guide lagging or hesitant companies through their inevitable journey towards Industry 4.0 enhanced digitalization.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









