Calibration Method for Line-Structured Light Three-Dimensional Measurement Based on a Simple Target

Abstract
:1. Introduction
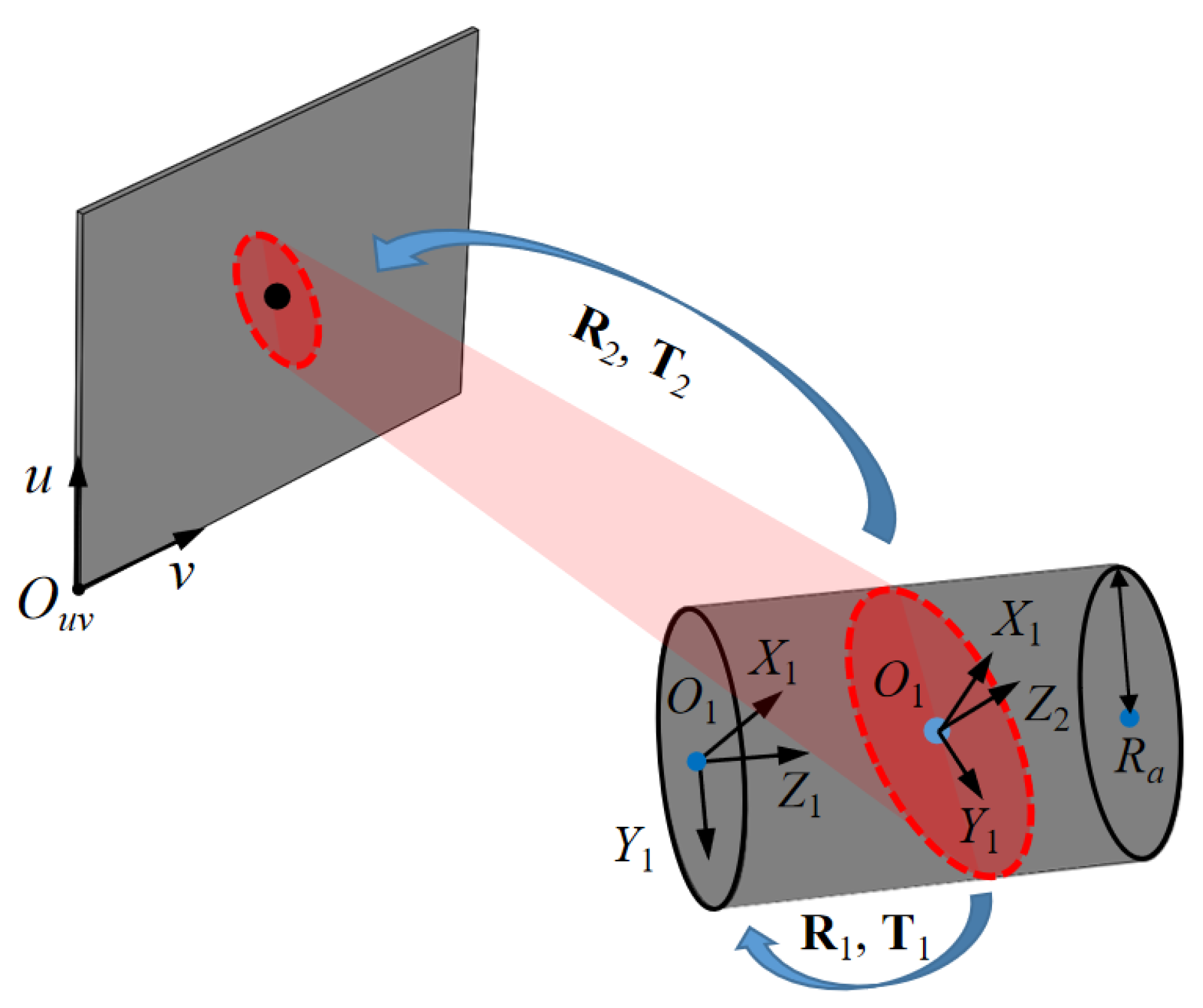
2. Line-Structured Light 3D-Measurement Model
3. Calibration Principle
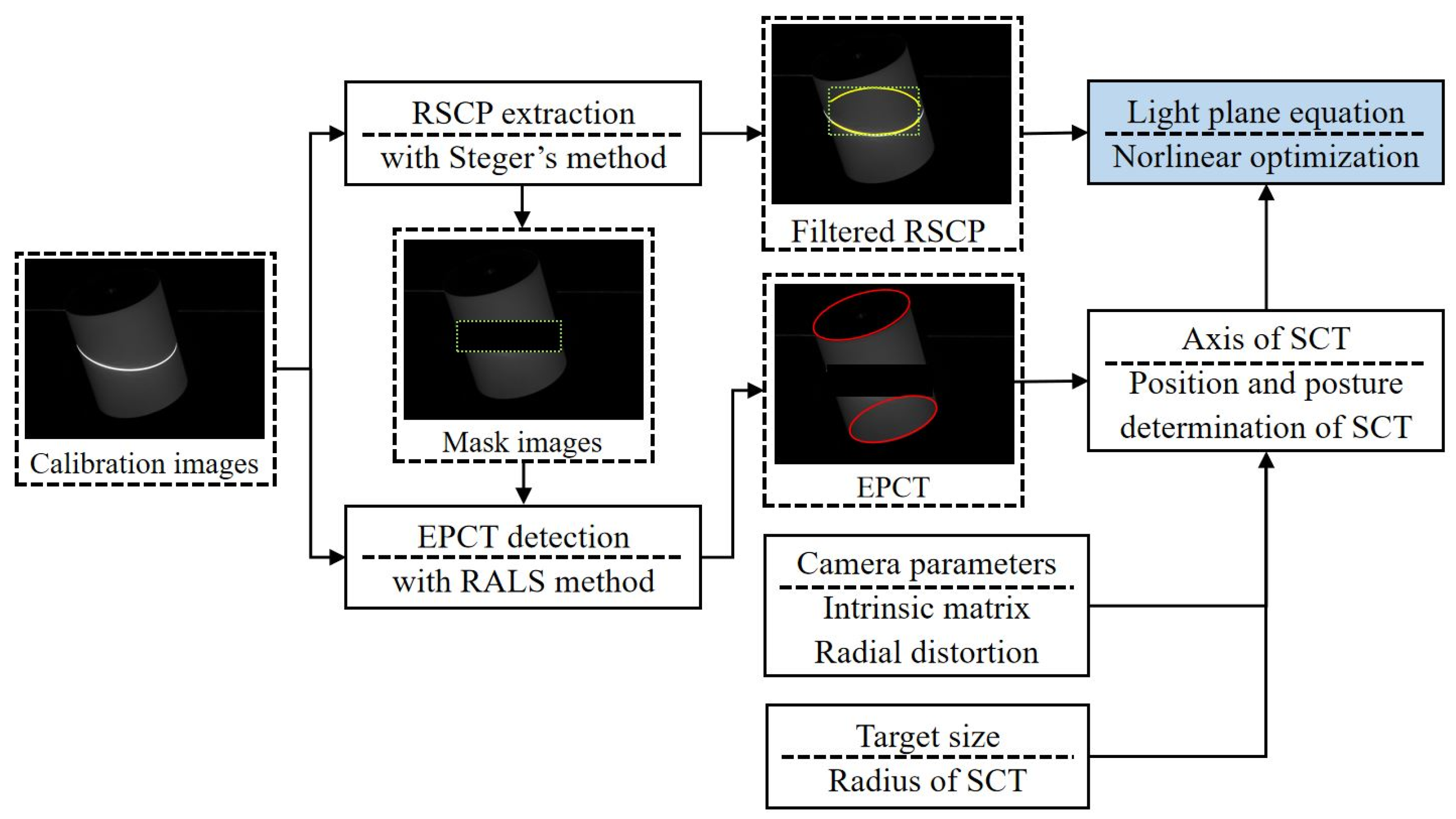
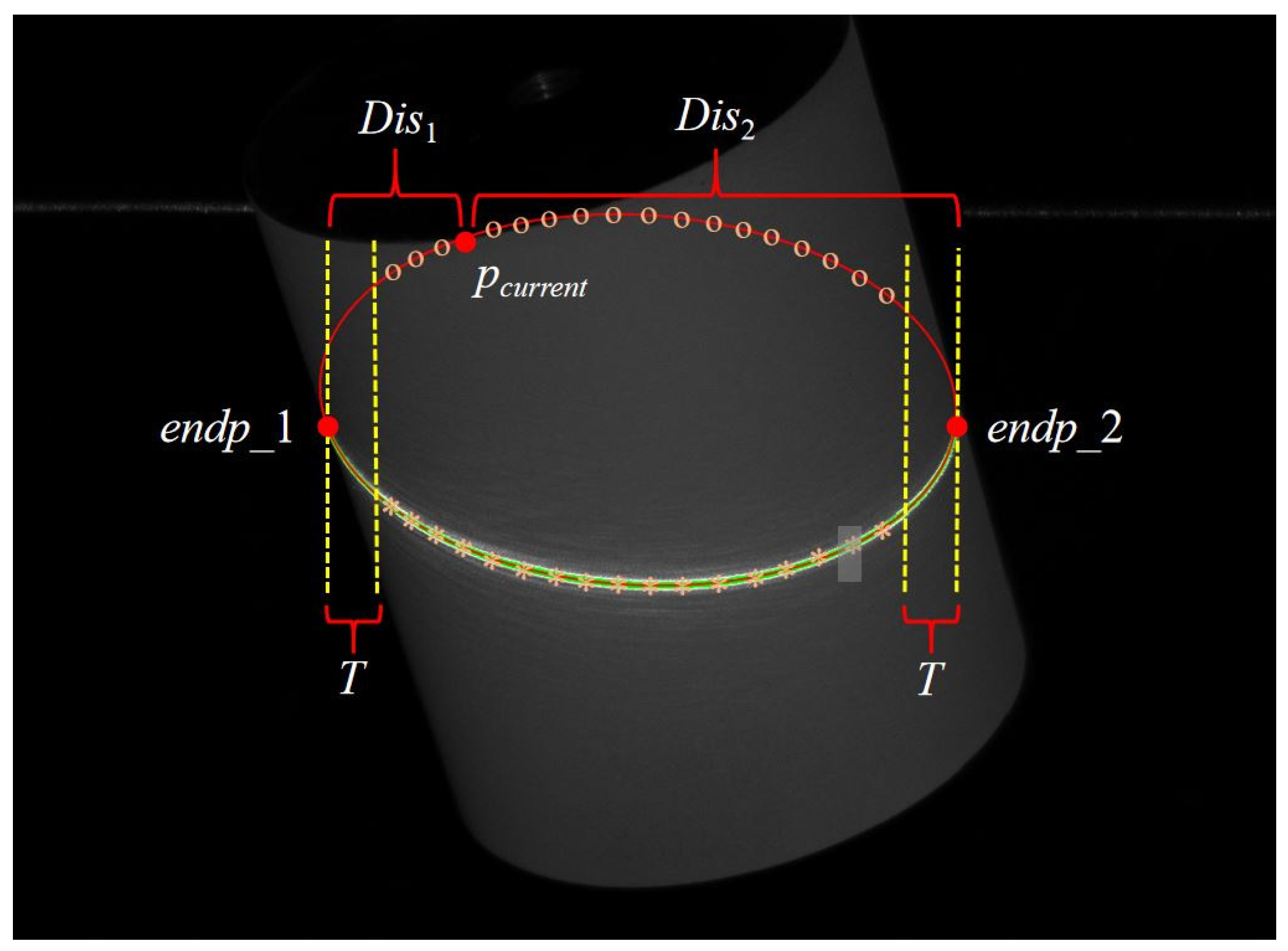
3.1. Calibration-Image Processing
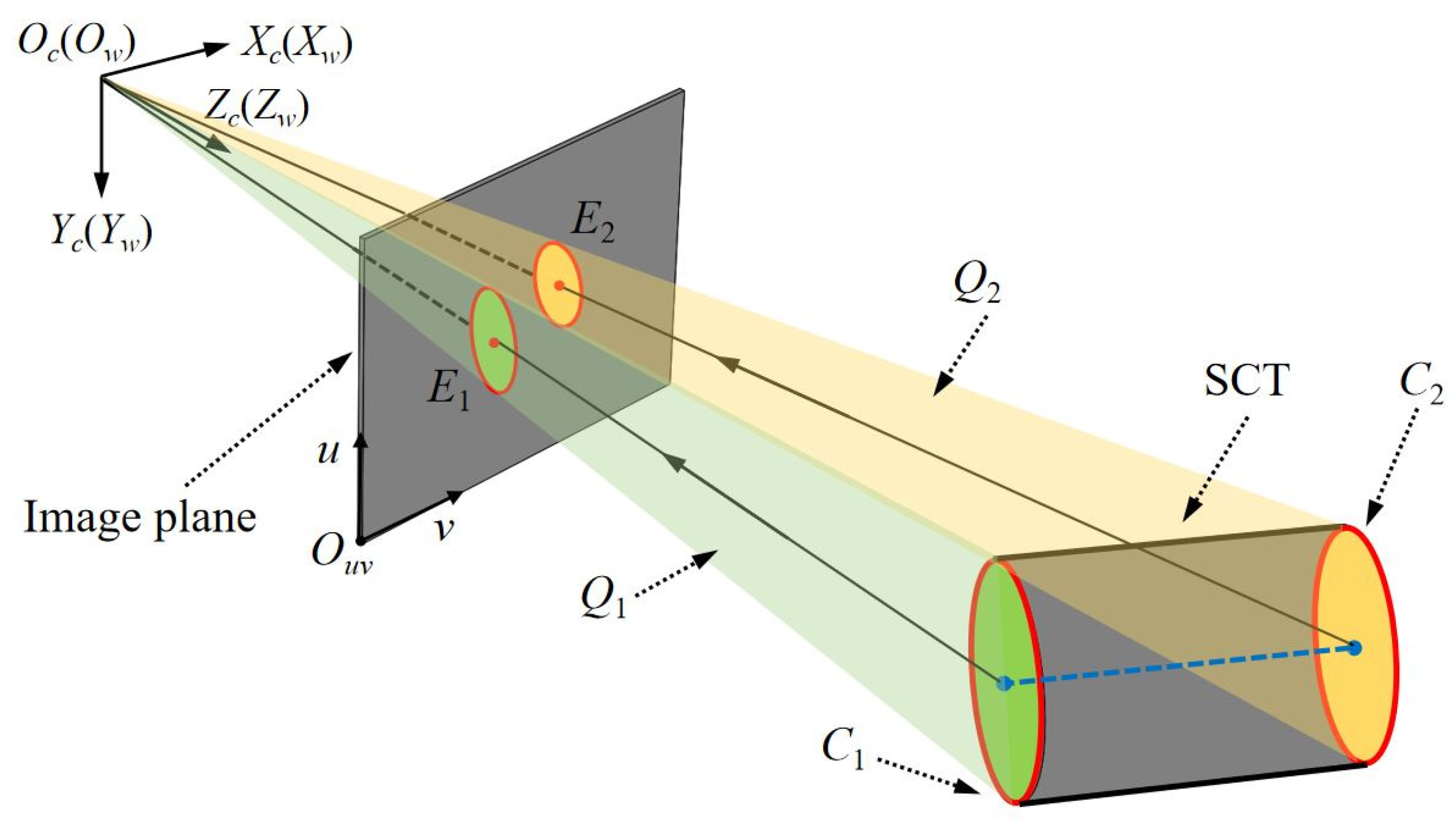
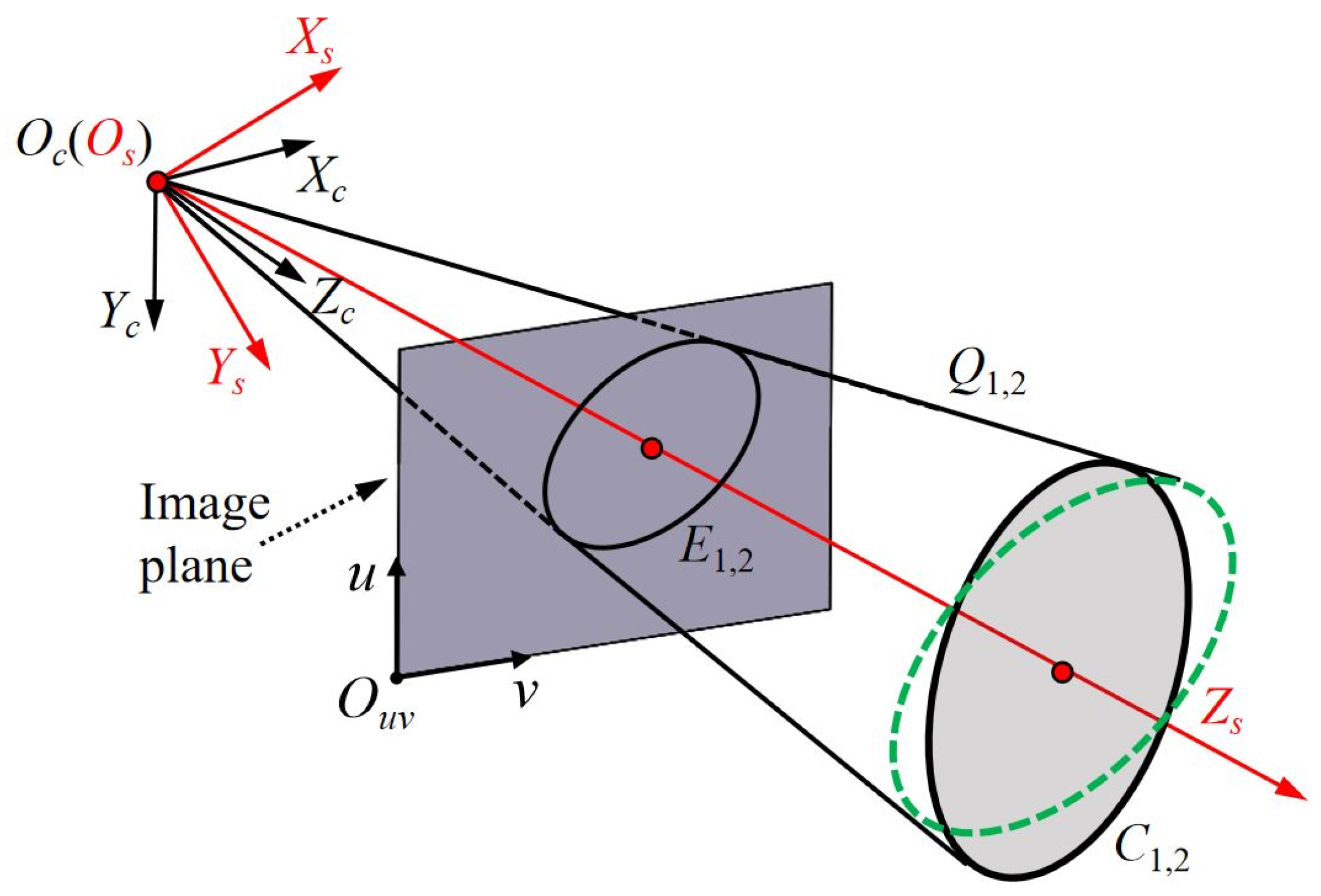
3.2. Position and Posture Determination of the SCT
3.3. Nonlinear Optimization of the Light-Plane Equation
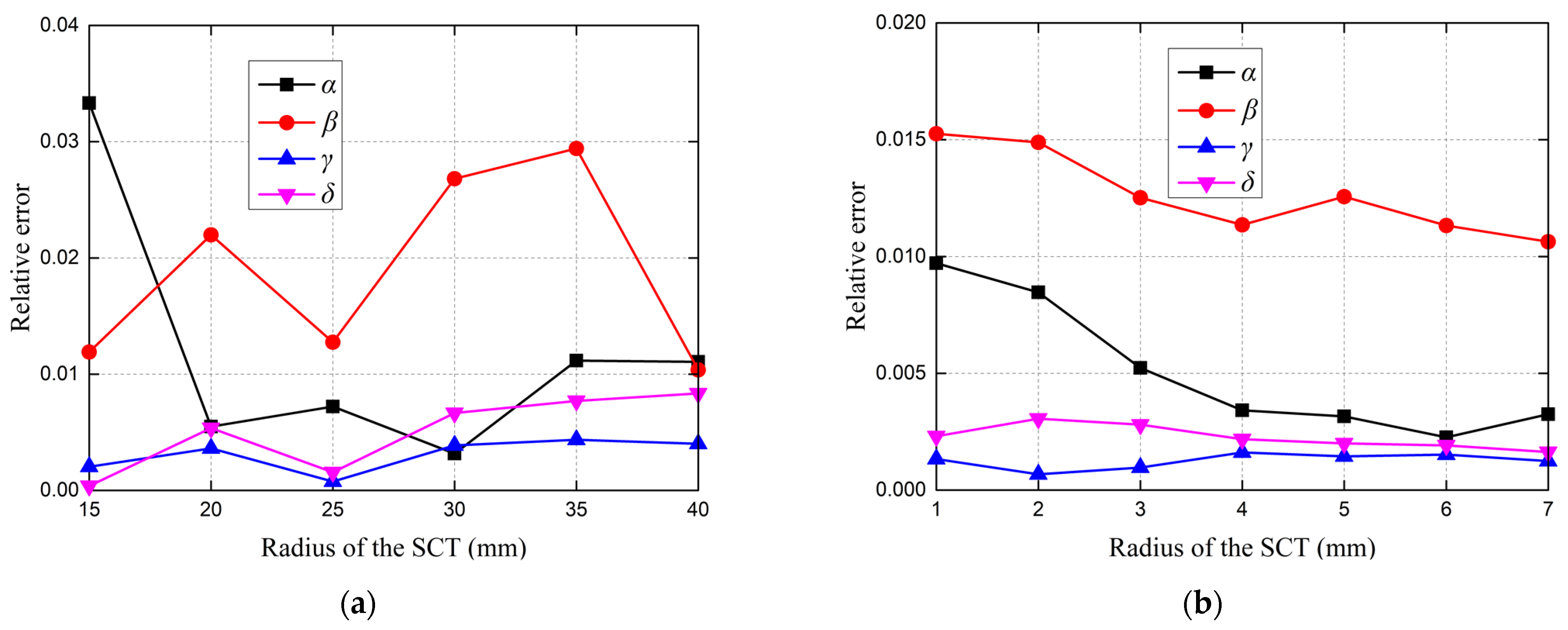
4. Simulations
5. Experiments
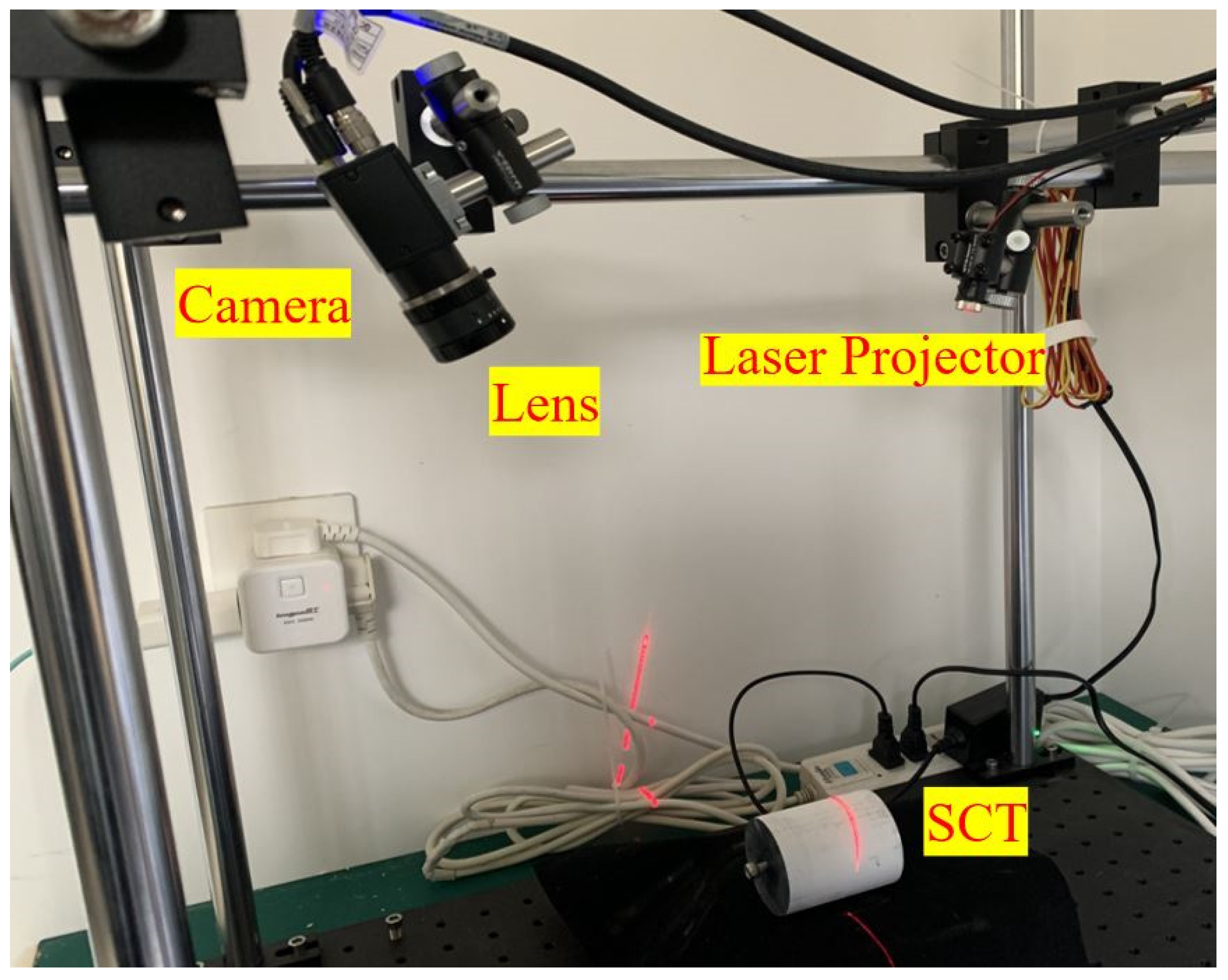
5.1. Experimental-System Setup
5.2. Experimental Procedure
5.3. Comparison Evaluation
5.4. Accuracy Evaluation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditions of I1, I2, I3, and K | Conic Types | ||
|---|---|---|---|
| I2 > 0 | I3 ≠ 0 | I1I3 < 0 | Ellipse |
| I1I3 > 0 | Imaginary ellipse | ||
| I3 = 0 | Point | ||
| I2 < 0 | I3 ≠ 0 | Hyperbola | |
| I3 = 0 | Metamorphosis hyperbola | ||
| I2 = 0 | I3 ≠ 0 | Parabola | |
| I3 = 0 | K < 0 | Parallel line | |
| K > 0 | Imaginary parallel line | ||
| K = 0 | Overlap line | ||
References
- Tang, Y.; Li, L.; Wang, C.; Chen, M.; Feng, W.; Zou, X.; Huang, K. Real-time detection of surface deformation and strain in recycled aggregate concrete-filled steel tubular columns via four-ocular vision. Robot. Comput.-Integr. Manuf. 2019, 59, 36–46. [Google Scholar] [CrossRef]
- Tang, Y.; Chen, M.; Wang, C.; Luo, L.; Li, J.; Lian, G.; Zou, X. Recognition and Localization Methods for Vision-Based Fruit Picking Robots: A Review. Front. Plant Sci. 2020, 11, 510. [Google Scholar] [CrossRef] [PubMed]
- Manzo, M.; Pellino, S. FastGCN + ARSRGemb: A novel framework for object recognition. J. Electron. Imaging 2021, 30, 033011. [Google Scholar] [CrossRef]
- Liu, Z.; Li, F.; Huang, B.; Zhang, G. Real-time and accurate rail wear measurement method and experimental analysis. J. Opt. Soc. Am. A 2014, 31, 1721–1729. [Google Scholar] [CrossRef]
- Jiang, J.; Miao, Z.; Zhang, G.J. Dynamic altitude angle measurement system based on dot-structure light. Infrared Laser Eng. 2010, 39, 532–536. [Google Scholar]
- Zhang, G.; Liu, Z.; Sun, J.; Wei, Z. Novel calibration method for a multi-sensor visual measurement system based on structured light. Opt. Eng. 2010, 49, 043602. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W. Binary defocusing technique based on complementary decoding with unconstrained dual projectors. J. Eur. Opt. Soc-Rapid. 2021, 17, 14. [Google Scholar] [CrossRef]
- Zuo, C.; Feng, S.; Huang, L.; Tao, T.; Yin, W.; Chen, Q. Phase shifting algorithms for fringe projection profilometry: A review. Opt. Laser Eng. 2018, 109, 23–59. [Google Scholar] [CrossRef]
- Sam, V.; Dirckx, J. Real-time structured light profilometry: A review. Opt. Laser Eng. 2016, 87, 18–31. [Google Scholar]
- Li, Y. Single-mirror beam steering system: Analysis and synthesis of high-order conic-section scan patterns. Appl. Opt. 2008, 87, 386–398. [Google Scholar] [CrossRef]
- Duma, V.F. Laser scanners with oscillatory elements: Design and optimization of 1D and 2D scanning functions. Appl. Math. Model. 2019, 67, 456–476. [Google Scholar] [CrossRef]
- Xu, X.B.; Fei, Z.W.; Yang, J.; Tan, Z.; Luo, M. Line structured light calibration method and centerline extraction: A review. Results Phys. 2020, 19, 103637. [Google Scholar] [CrossRef]
- Zhang, Z.Y. A Flexible New Technique for Camera Calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef] [Green Version]
- Huang, L.; Da, F.; Gai, S. Research on multi-camera calibration and point cloud correction method based on three-dimensional calibration object. Opt. Lasers Eng. 2019, 115, 32–41. [Google Scholar] [CrossRef]
- Liu, X.S.; Li, A.H. An integrated calibration technique for variable-boresight three-dimensional imaging system. Opt. Lasers Eng. 2022, 153, 107005. [Google Scholar] [CrossRef]
- Wang, Y.; Yuan, F.; Jiang, H.; Hu, Y. Novel camera calibration based on cooperative target in attitude measurement. Opt.-Int. J. Light Electron. Opt. 2016, 127, 10457–10466. [Google Scholar] [CrossRef]
- Wong, K.Y.; Zhang, G.; Chen, Z. A stratified approach for camera calibration using spheres. IEEE Trans. Image Process. 2011, 20, 305–316. [Google Scholar] [CrossRef] [Green Version]
- Wei, Z.; Cao, L.; Zhang, G. A novel 1D target-based calibration method with unknown orientation for structured light vision sensor. Opt. Laser Technol. 2010, 42, 570–574. [Google Scholar] [CrossRef]
- Liu, C.; Sun, J.H.; Liu, Z.; Zhang, G. A field calibration method for line structured light vision sensor with large FOV. Opto-Electron. Eng. 2013, 40, 106–112. [Google Scholar]
- Zhou, F.; Zhang, G. Complete calibration of a structured light stripe vision sensor through planar target of unknown orientations. Image Vis. Comput. 2005, 23, 59–67. [Google Scholar] [CrossRef]
- Wang, P.; Wang, J.; Xu, J.; Zhang, G.; Chen, K. Calibration method for a large-scale structured light measurement system. Appl. Opt. 2017, 56, 3995–4002. [Google Scholar] [CrossRef] [PubMed]
- Huynh, D.Q.; Owens, R.A.; Hartmann, P.E. Calibration a Structured Light Stripe System: A Novel Approach. Int. J. Comput. Vis. 1999, 33, 73–86. [Google Scholar] [CrossRef]
- Xu, G.Y.; Li, L.F.; Zeng, J.C. A new method of calibration in 3D vision system based on structure-light. Chin. J. Comput. 1995, 18, 450–456. [Google Scholar]
- Dewar, R. Self-generated targets for spatial calibration of structured light optical sectioning sensors with respect to an external coordinate system. Robot. Vis. Conf. Proc. 1988, 1, 5–13. [Google Scholar]
- Liu, Z.; Li, X.; Li, F.; Zhang, G. Calibration method for line-structured light vision sensor based on a single ball target. Opt. Lasers Eng. 2015, 69, 20–28. [Google Scholar] [CrossRef]
- Liu, Z.; Li, X.; Yin, Y. On-site calibration of line-structured light vision sensor in complex light environments. Opt. Express 2015, 23, 29896–29911. [Google Scholar] [CrossRef]
- Zhu, Z.M.; Wang, X.Y.; Zhou, F.Q.; Cen, Y.G. Calibration Method for Line-Structured Light Vision Sensor based on a Single Cylindrical Target. Appl. Opt. 2019, 59, 1376–1382. [Google Scholar] [CrossRef]
- Steger, C. An unbiased detector of curvilinear structures. IEEE Trans. Pattern Anal. 1998, 20, 113–125. [Google Scholar] [CrossRef] [Green Version]
- Tsuji, S.; Matsumoto, F. Detection of ellipses by a modified Hough transformation. IEEE Trans. Comput. 2006, 27, 777–781. [Google Scholar] [CrossRef]
- Chia, A.Y.S.; Rahardja, S.; Rajan, D.; Leung, M.K. A split and merge based ellipse detector with self-correcting capability. IEEE Trans. Image Process. 2011, 20, 1991–2006. [Google Scholar] [CrossRef]
- Lu, C.; Xia, S.; Shao, M.; Fu, Y. Arc-Support Line Segments Revisited: An Efficient High-Quality Ellipse Detection. IEEE Trans. Image Process. 2020, 29, 768–781. [Google Scholar] [CrossRef] [PubMed]
- Paul, L.R. A note on the least squares fitting of ellipses. Pattern Recognit. Lett. 1993, 14, 799–808. [Google Scholar]
- Kulpa, K. On the properties of discrete circles, rings, and disks. Comput. Graph. Image Process. 1979, 10, 348–365. [Google Scholar] [CrossRef]
- Zhang, L.J.; Huang, X.X.; Feng, W.C.; Liang, S.; Hu, T. Solution of duality in circular feature with three line configuration. Acta Opt. Sin. 2016, 36, 51. [Google Scholar]
- Bouguet, J.Y. Camera Calibration Toolbox Got MATLAB. 2015. Available online: http://www.vision.caltech.edu/bouguetj/calib_doc/ (accessed on 20 February 2022).
- Bronshtein, I.N. Handbook of Mathematics; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]





| Img. No. | Pt. No. | 3D Coordinates with Zhou’s Method | 3D Coordinates with Our Proposed Method (One Time) | 3D Coordinates with Our Proposed Method (Four Times) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | −64.8947 | −6.1514 | 353.9093 | −64.9559 | −6.1572 | 354.2431 | −64.9035 | −6.1522 | 353.9570 |
| 2 | −30.0231 | −6.3441 | 354.3015 | −30.0544 | −6.3507 | 354.6705 | −30.0291 | −6.3453 | 354.3725 | |
| 3 | 5.8525 | −6.3470 | 354.4686 | 5.8592 | −6.3543 | 354.8726 | 5.8541 | −6.3487 | 354.5629 | |
| 4 | 49.2086 | −6.3507 | 354.6705 | 49.2706 | −6.3587 | 355.1169 | 49.2256 | −6.3529 | 354.7929 | |
| 2 | 1 | −62.6991 | −9.7994 | 358.3387 | −62.7616 | −9.8092 | 358.6959 | −62.7101 | −9.8012 | 358.4016 |
| 2 | −19.1331 | −1.8554 | 348.9135 | −19.1524 | −1.8573 | 349.2668 | −19.1364 | −1.8557 | 348.9745 | |
| 3 | 15.3191 | 4.2758 | 341.6428 | 15.3349 | 4.2802 | 341.9938 | 15.3218 | 4.2766 | 341.7029 | |
| 4 | 51.4641 | 10.4954 | 334.2729 | 51.5179 | 10.5063 | 334.6223 | 51.4733 | 10.4973 | 334.3328 | |
| 3 | 1 | −66.7849 | 6.8915 | 338.1001 | −66.8362 | 6.8968 | 338.3598 | −66.7844 | 6.8915 | 338.0978 |
| 2 | −45.9074 | 12.9892 | 330.8081 | −45.9417 | 12.9989 | 331.0549 | −45.9058 | 12.9888 | 330.7964 | |
| 3 | −23.9047 | 4.4499 | 341.2532 | −23.9267 | 4.4540 | 341.5663 | −23.9071 | 4.4504 | 341.2868 | |
| 4 | −30.6853 | 9.4680 | 335.1432 | −30.7109 | 9.4759 | 335.4226 | −30.6863 | 9.4683 | 335.1536 | |
| 4 | 1 | −79.4441 | −53.2654 | 410.9187 | −79.7660 | −53.4812 | 412.5834 | −79.4944 | −53.2991 | 411.1786 |
| 2 | −40.6191 | 1.4219 | 344.8453 | −40.7086 | 1.4251 | 345.6052 | −40.6232 | 1.4221 | 344.8802 | |
| 3 | −27.2117 | 7.2410 | 337.8570 | −27.2590 | 7.2535 | 338.4440 | −27.2134 | 7.2414 | 337.8778 | |
| 4 | −3.4644 | 7.0703 | 338.1719 | −3.4680 | 7.0778 | 338.5268 | −3.4647 | 7.0711 | 338.2080 | |
| Img. No. | 3D Coordinates of CRI in the TCS | 3D Coordinates of Testing Points with Zhou’s Method | 3D Coordinates of Testing Points with Zhu’s Method | 3D Coordinates of Testing Points with Our Proposed Method (One Time) | 3D Coordinates of Testing Points with Our Proposed Method (Four Time) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 35.3298 | 50 | 0 | 7.5092 | 3.3665 | 342.7088 | 7.4988 | 3.3567 | 343.3210 | 7.5168 | 3.3700 | 343.0576 | 7.5104 | 3.3671 | 342.7673 |
| 35.4605 | 70 | 0 | 26.7451 | 6.9766 | 338.4231 | 26.7235 | 6.9654 | 338.5439 | 26.7725 | 6.9837 | 338.7694 | 26.7496 | 6.9778 | 338.4804 | |
| 2 | 45.5751 | 30 | 0 | −8.8570 | 7.2698 | 337.9057 | −8.8498 | 7.2659 | 338.1598 | −8.8651 | 7.2765 | 338.2172 | −8.8579 | 7.2705 | 337.9400 |
| 44.7668 | 60 | 0 | 21.2191 | 7.5686 | 337.6807 | 21.2145 | 7.5839 | 338.1210 | 21.2403 | 7.5762 | 338.0185 | 21.2224 | 7.5698 | 337.7325 | |
| 3 | 35.5497 | 30 | 0 | −18.8642 | −6.5621 | 354.7166 | −18.8598 | −6.5705 | 355.0120 | −18.8684 | −6.5636 | 354.6956 | −18.8844 | −6.5692 | 354.9977 |
| 36.0057 | 70 | 0 | 21.1461 | −6.5656 | 354.8030 | 21.1821 | −6.5801 | 355.1356 | 21.1712 | −6.5734 | 355.2233 | 21.1524 | −6.5675 | 354.9081 | |
| Img. No. | dt | dm1 | dm2 | dm3 | dm4 | Δ(dt, dm1) | Δ(dt, dm2) | Δ(dt, dm2) | Δ(dt, dm3) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 61.2225 | 61.2170 | 61.2626 | 61.2583 | 61.2238 | 0.0055 | 0.0401 | −0.0358 | −0.0013 |
| 78.4694 | 78.4230 | 78.4011 | 78.4566 | 78.4285 | 0.0464 | −0.0683 | 0.0128 | 0.0409 | |
| 2 | 54.5627 | 54.6404 | 54.6696 | 54.6774 | 54.6443 | −0.0777 | 0.1069 | −0.1147 | −0.0816 |
| 74.8603 | 74.8623 | 74.9039 | 74.9106 | 74.8697 | −0.0020 | 0.0436 | −0.0503 | −0.0094 | |
| 3 | 46.5165 | 46.4330 | 46.5333 | 46.4220 | 46.5131 | 0.0835 | 0.0168 | 0.0945 | 0.0034 |
| 78.7173 | 78.6527 | 78.7481 | 78.7595 | 78.6793 | 0.0646 | 0.0308 | −0.0422 | 0.0380 | |
| RMS error | 0.0568 | 0.0589 | 0.0681 | 0.0406 | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Zhang, W.; Song, G. Calibration Method for Line-Structured Light Three-Dimensional Measurement Based on a Simple Target. Photonics 2022, 9, 218. https://doi.org/10.3390/photonics9040218
Li X, Zhang W, Song G. Calibration Method for Line-Structured Light Three-Dimensional Measurement Based on a Simple Target. Photonics. 2022; 9(4):218. https://doi.org/10.3390/photonics9040218
Chicago/Turabian StyleLi, Xuexing, Wenhui Zhang, and Guanglei Song. 2022. "Calibration Method for Line-Structured Light Three-Dimensional Measurement Based on a Simple Target" Photonics 9, no. 4: 218. https://doi.org/10.3390/photonics9040218
APA StyleLi, X., Zhang, W., & Song, G. (2022). Calibration Method for Line-Structured Light Three-Dimensional Measurement Based on a Simple Target. Photonics, 9(4), 218. https://doi.org/10.3390/photonics9040218