An Optimal Scheme for the Number of Mirrors in Vehicular Visible Light Communication via Mirror Array-Based Intelligent Reflecting Surfaces


Abstract
:1. Introduction
- To ensure the effectiveness of the communication system, the achievable rate needs to reach a certain value. Since the transmitted signal is non-negative, real, and limited amplitude, the classical Shannon capacity formula is not suitable for VLC. Researchers have been studied the lower bound of the achievable capacity of the VLC system [36,37,38], and the achievable rate is proportional to the signal-to-noise ratio (SNR) [39]. Each mirror in the IRS is independently controlled, and the light reaches the receiver through their reflection. The total channel gain equals the sum of channel gain corresponding to each mirror, and the SNR becomes larger with the number of mirrors increasing.So, the achievable rate is not only related to the channel gain corresponding to each mirror, but also to the number of mirrors.
- In the IRS-aided VLC system, the power consumption of the system is mainly included that of the transmitter, receiver, and IRS. The power consumption of the transmitter and receiver mainly includes signal power, DC offset, and the hardware static power consumption [40,41]. The power consumption of the IRS equals the sum of that for each mirror rotating. Therefore, the total power consumption changes depending on the number of mirrors.
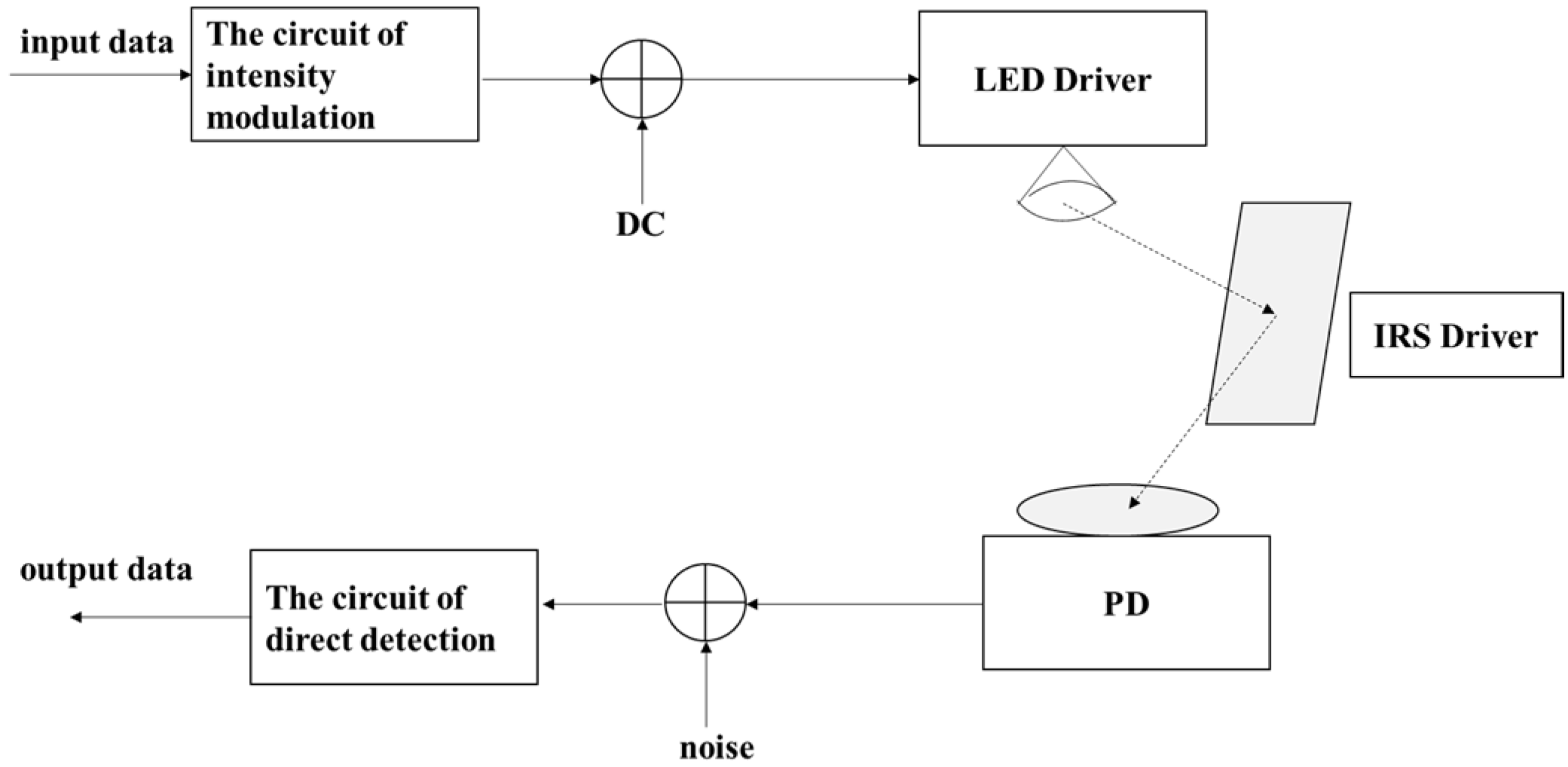
- The VLC system via mirror array-based IRS for parallel vehicles is designed, which provides convenience for parallel vehicles to realize VLC. The right headlamp of the right vehicle is used as the transmitter, the receiver is installed between the two headlamps of the left vehicle, and the IRS is installed on the street light pole. The channel model of the system is analyzed, and the channel gain is calculated.
- The calculation methods of the achievable rate and power consumption are given. According to the system model, the calculation formulas of the SNR and the instantaneous achievable rate are given. Based on reference [40], the total power consumption of the system and the power consumption of each mirror are analyzed. Both the achievable rate and the total power consumption are functions of the number of mirrors N, and thus EE is also a function of N.
- The number of mirrors optimization problem under the EE maximization is formulated. Considering the non-negative of the transmitted signal, the maximum power consumption satisfied luminous ability and eye safety, the minimum achievable rate, and the required bit error rate (BER), the optimal value of N is found. According to the constraints and the properties of the achievable rate, EE is proved to be a unimodal function.
- The binary search-conditional iterative (BSCI) algorithm is proposed to optimize N. According to the constraints of the optimization problem, the range of N is analyzed. The BSCI algorithm is proposed, which has low computational complexity and can quickly find the optimal value of N.
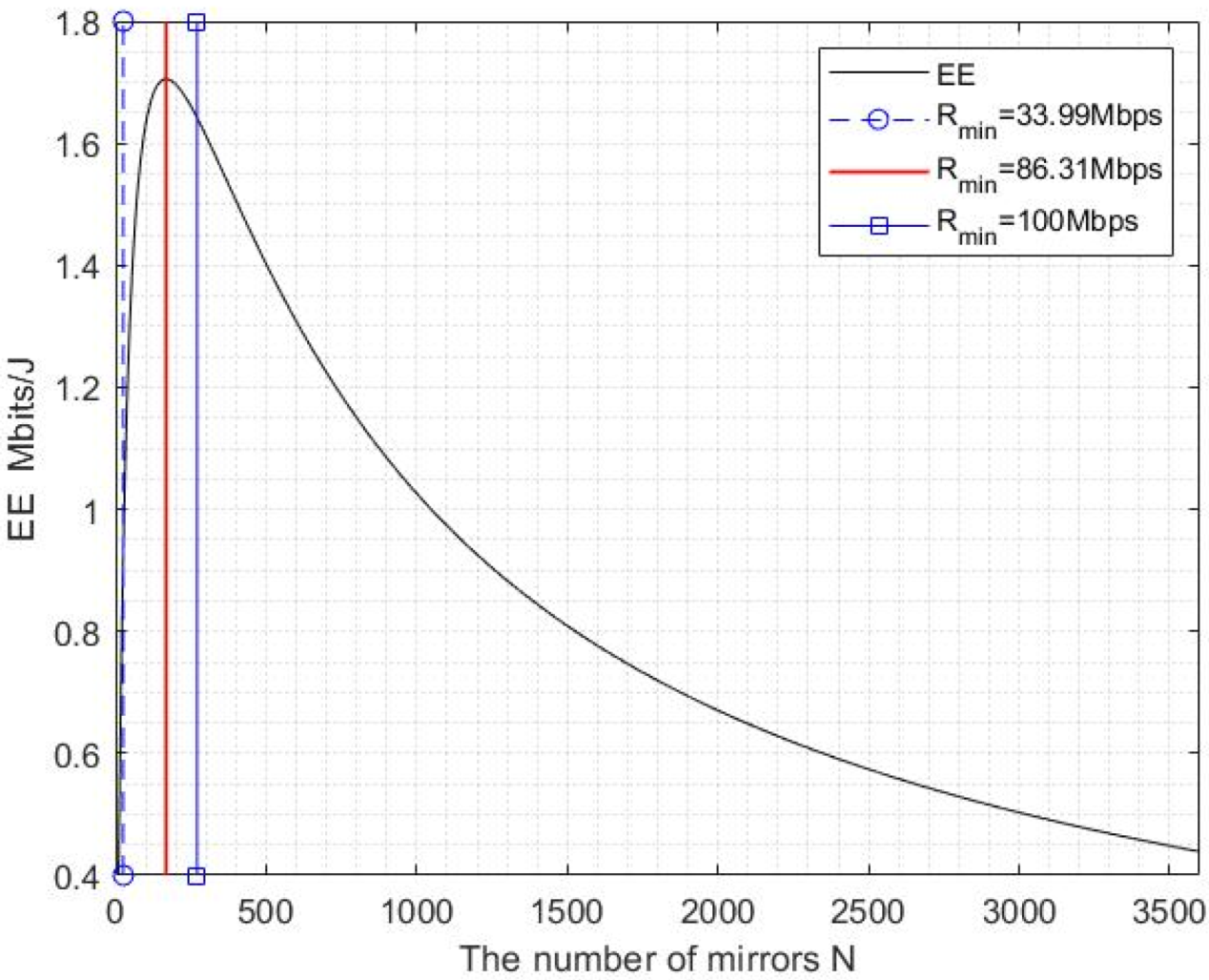
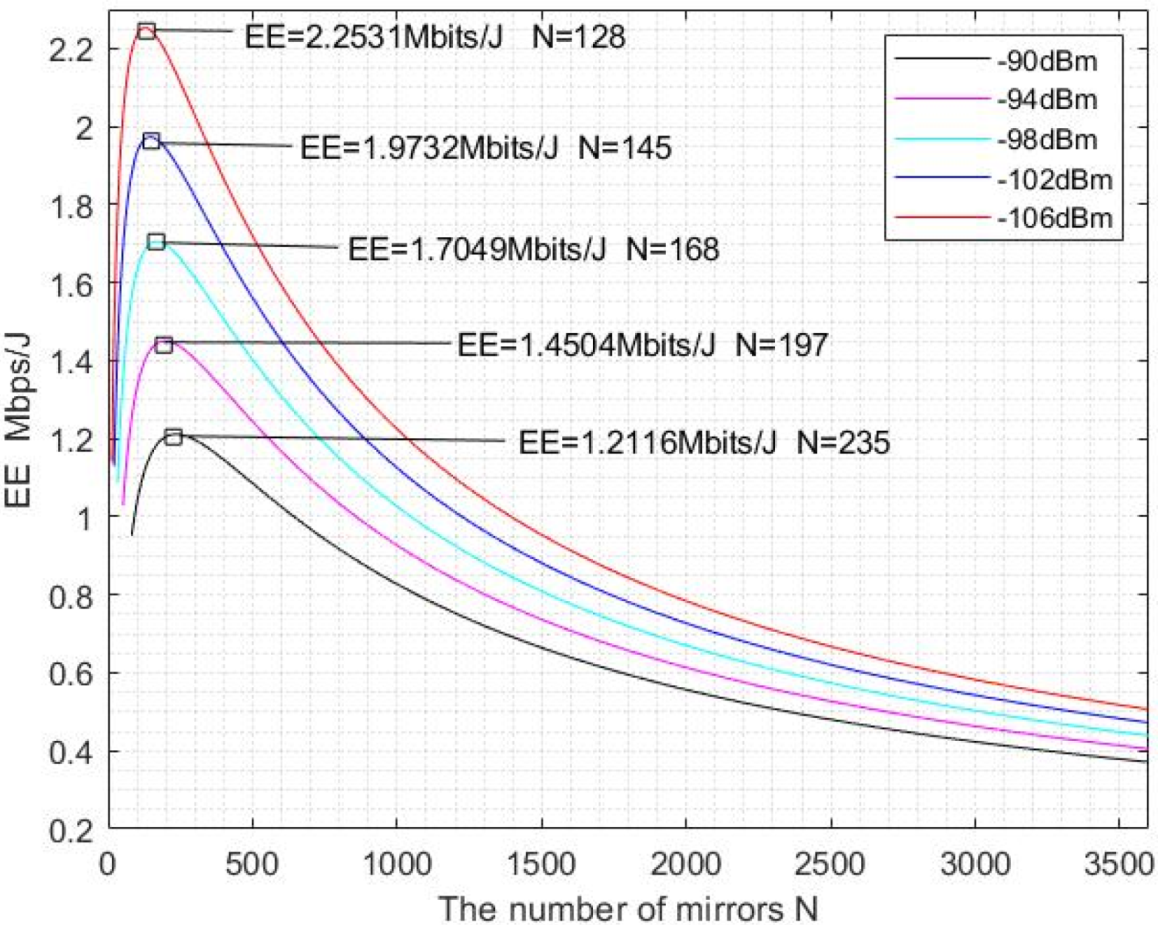
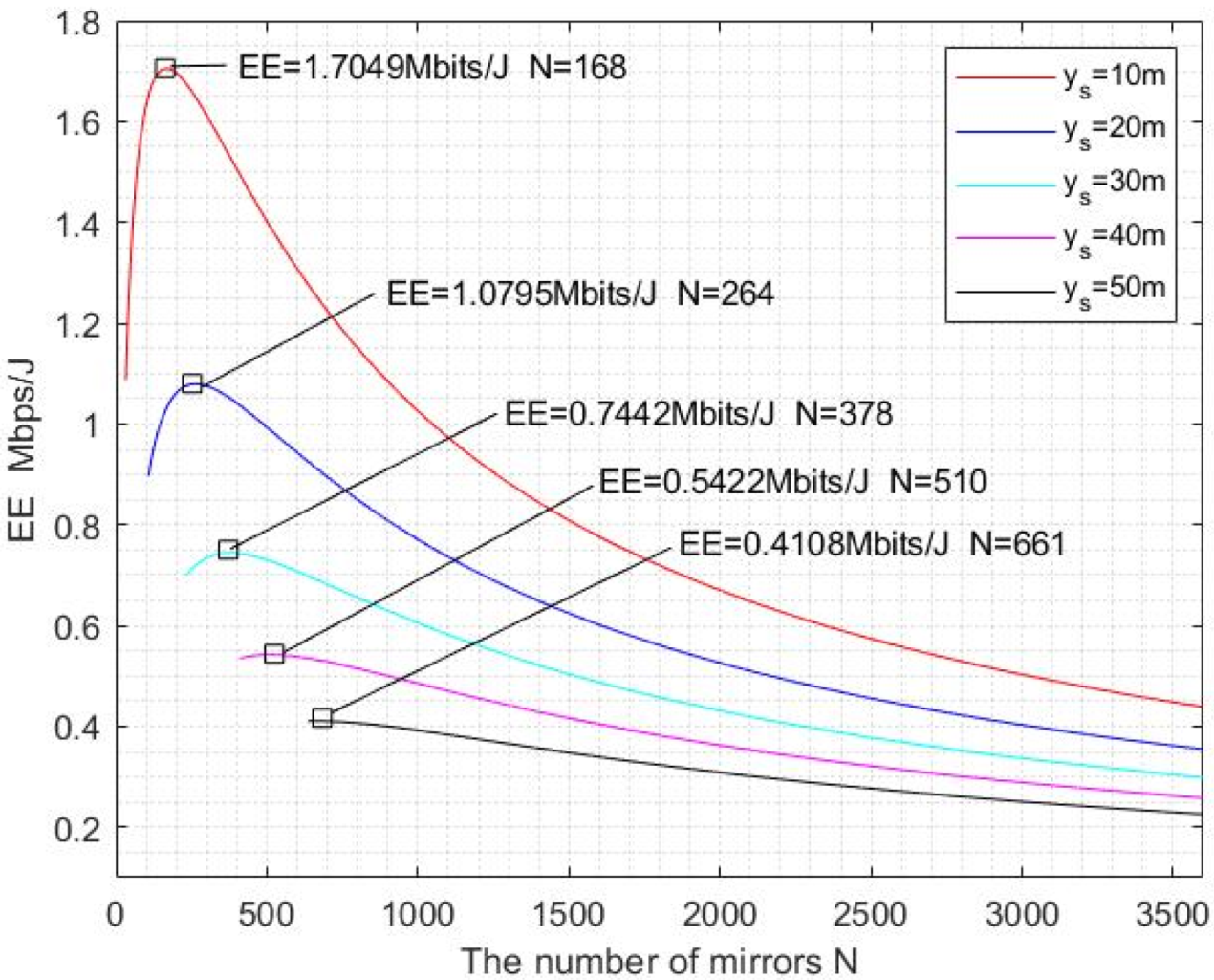
- The optimization of N with different minimum achievable rates, noise power, and distance between vehicle and IRS is simulated. Firstly, the influence of the minimum achievable rate on the range of N is analyzed. Then, the optimal value of N is analyzed when the minimum achievable rate is constant and the noise power is different. Finally, the optimal value of N is analyzed when the distance between the vehicle and the IRS changes when the minimum achievable rate and noise power are constant. The theoretical analysis of this paper and the performance of the BSCI algorithm are proved.
2. System Model and Analysis
2.1. System Model
2.2. SNR
2.3. The Achievable Rate
2.4. The Total Power Consumption
3. The Number of Mirrors Optimization
3.1. Problem Formulation
- It keeps increasing with the increasing of N. The peak value of EE will not appear within the range of N;
- There exists an , decreases monotonically when . At this time, .
3.2. BSCI Algorithm
- If , decreases monotonically with N. is the maximum value of and the optimal value of N is ;
- If , increases monotonically with N. The peak value of EE does not appear within this range and the optimal value of N does not exist;
- If it is not the case of (1) and (2), increases first and then decreases with N. To reduce the amount of computation, the binary search (Algorithm 1) method is used to find the maximum value of as follows.
| Algorithm 1: The Binary Search Method |
| else |
| end |
| end |
- If , does not exist.
- If EE , and .
- If not in the above two cases, and are obtained by using the binary search method.
| Algorithm 2: The BSCI Algorithm |
| Given the parameter values of the LED, PD, and IRS |
| break; |
| else |
| end if |
| end if |
| end for |
4. Numerical Results
4.1. Simulation Parameters
4.2. Numerical Results
4.2.1. EE Performance with Different
4.2.2. EE Performance with Different
4.2.3. EE Performance with Different
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Reza, S.; Oliveira, H.S.; Machado, J.J.M.; Tavares, J. Urban Safety: An Image-Processing and Deep-Learning-Based Intelligent Traffic Management and Control System. Sensors 2021, 21, 7705. [Google Scholar] [CrossRef] [PubMed]
- Lv, Z.; Lou, R.; Singh, A.K. AI Empowered Communication Systems for Intelligent Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4579–4587. [Google Scholar] [CrossRef]
- Zadobrischi, E.; Cosovanu, L.-M.; Dimian, M. Traffic Flow Density Model and Dynamic Traffic Congestion Model Simulation Based on Practice Case with Vehicle Network and System Traffic Intelligent Communication. Symmetry 2020, 12, 1172. [Google Scholar] [CrossRef]
- Yang, Y.; Hua, K. Emerging Technologies for 5G-Enabled Vehicular Networks. IEEE Access 2019, 7, 181117–181141. [Google Scholar] [CrossRef]
- He, R.; Schneider, C.; Ai, B.; Wang, G.; Zhong, Z.; Dupleich, D.A.; Thomae, R.S.; Boban, M.; Luo, J.; Zhang, Y. Propagation Channels of 5G Millimeter-Wave Vehicle-to-Vehicle Communications: Recent Advances and Future Challenges. IEEE Veh. Technol. Mag. 2020, 15, 16–26. [Google Scholar] [CrossRef]
- do Vale Saraiva, T.; Campos, C.A.V.; Fontes, R.d.R.; Rothenberg, C.E.; Sorour, S.; Valaee, S. An Application-Driven Framework for Intelligent Transportation Systems Using 5G Network Slicing. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5247–5260. [Google Scholar] [CrossRef]
- Ning, Z.; Zhang, K.; Wang, X.; Obaidat, M.S.; Guo, L.; Hu, X.; Hu, B.; Guo, Y.; Sadoun, B.; Kwok, R.Y.K. Joint Computing and Caching in 5G-Envisioned Internet of Vehicles: A Deep Reinforcement Learning-Based Traffic Control System. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5201–5212. [Google Scholar] [CrossRef]
- Chen, C.; Yuru, T.; Yueping, C.; Min, L. Fairness-aware hybrid NOMA/OFDMA for bandlimited multi-user VLC systems. Opt. Express 2021, 29, 42265–42275. [Google Scholar] [CrossRef]
- Chen, C.; Zhong, X.; Fu, S.; Jian, X.; Liu, M.; Yang, H.; Alphones, A.; Fu, H.Y. OFDM-Based Generalized Optical MIMO. J. Lightw. Technol. 2021, 39, 6063–6075. [Google Scholar] [CrossRef]
- Miao, P.; Yin, W.; Peng, H.; Yao, Y. Study of the Performance of Deep Learning-Based Channel Equalization for Indoor Visible Light Communication Systems. Photonics 2021, 8, 453. [Google Scholar] [CrossRef]
- Chen, C.; Fu, S.; Jian, X.; Liu, M.; Deng, X.; Ding, Z. NOMA for Energy-Efficient LiFi-Enabled Bidirectional IoT Communication. IEEE Trans. Commun. 2021, 69, 1693–1706. [Google Scholar] [CrossRef]
- Arai, S.; Tang, Z.; Nakayama, A.; Takata, H.; Yendo, T. Rotary LED Transmitter for Improving Data Transmission Rate of Image Sensor Communication. IEEE Photonics J. 2021, 13, 1–11. [Google Scholar] [CrossRef]
- Takahashi, K.; Kamakura, K.; Kinoshita, M.; Yamazato, T. Luminance Inversion for Parallel Transmission Visible Light Communication Between LCD and Image Sensor Camera. J. Lightw. Technol. 2021, 39, 6759–6767. [Google Scholar] [CrossRef]
- Sun, X.; Shi, W.; Cheng, Q.; Liu, W.; Wang, Z.; Zhang, J. An LED Detection and Recognition Method Based on Deep Learning in Vehicle Optical Camera Communication. IEEE Access 2021, 9, 80897–80905. [Google Scholar] [CrossRef]
- Zhu, Z.; Wei, S.; Liu, R.; Hong, Z.; Zheng, Z.; Fan, Z.; Ma, D. Freeform surface design for high-efficient LED low-beam headlamp lens. Opt. Commun. 2020, 477, 126269. [Google Scholar] [CrossRef]
- Singh, R.; Mochizuki, M.; Yamada, T.; Nguyen, T. Cooling of LED headlamp in automotive by heat pipes. Appl. Therm. Eng. 2020, 166, 114733. [Google Scholar] [CrossRef]
- Memedi, A.; Dressler, F. Vehicular Visible Light Communications: A Survey. IEEE Commun. Surv. Tutor. 2021, 23, 161–181. [Google Scholar] [CrossRef]
- Turan, B.; Coleri, S. Machine Learning Based Channel Modeling for Vehicular Visible Light Communication. IEEE Trans. Veh. Technol. 2021, 70, 9659–9672. [Google Scholar] [CrossRef]
- Alsalami, F.M.; Ahmad, Z.; Zvanovec, S.; Haigh, P.A.; Haas, O.C.L.; Rajbhandari, S. Statistical channel modelling of dynamic vehicular visible light communication system. Veh. Commun. 2021, 29, 100339. [Google Scholar] [CrossRef]
- Karbalayghareh, M.; Miramirkhani, F.; Eldeeb, H.B.; Kizilirmak, R.C.; Sait, S.M.; Uysal, M. Channel Modelling and Performance Limits of Vehicular Visible Light Communication Systems. IEEE Trans. Veh. Technol. 2020, 69, 6891–6901. [Google Scholar] [CrossRef]
- Luo, P.; Ghassemlooy, Z.; Minh, H.L.; Bentley, E.; Burton, A.; Tang, X. Performance analysis of a car-to-car visible light communication system. Appl. Opt. 2015, 54, 1696–1706. [Google Scholar] [CrossRef]
- Huang, C.; Zappone, A.; Alexandropoulos, G.C.; Debbah, M.; Yuen, C. Reconfigurable Intelligent Surfaces for Energy Efficiency in Wireless Communication. IEEE Trans. Wirel. Commun. 2019, 18, 4157–4170. [Google Scholar] [CrossRef] [Green Version]
- Pan, C.; Ren, H.; Wang, K.; Elkashlan, M.; Nallanathan, A.; Wang, J.; Hanzo, L. Intelligent Reflecting Surface Aided MIMO Broadcasting for Simultaneous Wireless Information and Power Transfer. IEEE J. Sel. Areas Commun. 2020, 38, 1719–1734. [Google Scholar] [CrossRef]
- Du, H.; Zhang, J.; Cheng, J.; Ai, B. Millimeter Wave Communications with Reconfigurable Intelligent Surfaces: Performance Analysis and Optimization. IEEE Trans. Commun. 2021, 69, 2752–2768. [Google Scholar] [CrossRef]
- Sur, S.N.; Bera, R. Intelligent reflecting surface assisted MIMO communication system: A review. Phys. Commun. 2021, 47, 101386. [Google Scholar] [CrossRef]
- Masini, B.M.; Silva, C.M.; Balador, A. The Use of Meta-Surfaces in Vehicular Networks. J. Sens. Actuator Netw. 2020, 9, 15. [Google Scholar] [CrossRef] [Green Version]
- Makarfi, A.U.; Rabie, K.M.; Kaiwartya, O.; Adhikari, K.; Li, X.; Quiroz-Castellanos, M.; Kharel, R. Reconfigurable Intelligent Surfaces-Enabled Vehicular Networks: A Physical Layer Security Perspective. arXiv 2020, arXiv:2004.11288. [Google Scholar]
- Dingel, B.B.; Tsukamoto, K.; Mikroulis, S.; Deng, P.; Kavehrad, M.; Lou, Y. MEMS-based beam-steerable free-space optical communication link for reconfigurable wireless data center. In Proceedings of the Broadband Access Communication Technologies XI, San Francisco, CA, USA, 28 January 2017; Volume 10128, p. 1012805. [Google Scholar]
- Cao, Z.; Zhang, X.; Osnabrugge, G.; Li, J.; Vellekoop, I.M.; Koonen, A.M.J. Reconfigurable beam system for non-line-of-sight free-space optical communication. Light Sci. Appl. 2019, 8, 69. [Google Scholar] [CrossRef]
- Jamali, V.; Ajam, H.; Najafi, M.; Schmauss, B.; Schober, R.; Poor, H.V. Intelligent Reflecting Surface-assisted Free-space Optical Communications. IEEE Commun. Mag. 2021, 59, 57–63. [Google Scholar] [CrossRef]
- Abdelhady, A.M.; Salem, A.K.S.; Amin, O.; Shihada, B.; Alouini, M.-S. Visible Light Communications via Intelligent Reflecting Surfaces: Metasurfaces vs Mirror Arrays. IEEE Open J. Commun. Soc. 2021, 2, 1–20. [Google Scholar] [CrossRef]
- Alizadeh Jarchlo, E.; Eso, E.; Doroud, H.; Siessegger, B.; Ghassemlooy, Z.; Caire, G.; Dressler, F. Li-Wi: An upper layer hybrid VLC-WiFi network handover solution. Ad Hoc Netw. 2022, 124, 102705. [Google Scholar] [CrossRef]
- Basar, E. Reconfigurable Intelligent Surface-Based Index Modulation: A New Beyond MIMO Paradigm for 6G. IEEE Trans. Commun. 2020, 68, 3187–3196. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Bjornson, E.; Matthaiou, M.; Ng, D.W.K.; Yang, H.; Love, D.J. Prospective Multiple Antenna Technologies for Beyond 5G. IEEE J. Sel. Areas Commun. 2020, 38, 1637–1660. [Google Scholar] [CrossRef]
- Bjornson, E.; Ozdogan, O.; Larsson, E.G. Intelligent Reflecting Surface Versus Decode-and-Forward: How Large Surfaces are Needed to Beat Relaying? IEEE Wirel. Commun. Lett. 2020, 9, 244–248. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Hu, Q.; Wang, J.; Chen, M.; Wang, J. Tight bounds on channel capacity for dimmable visible light communications. J. Lightw. Technol. 2013, 31, 3771–3779. [Google Scholar] [CrossRef]
- Ma, S.; Yang, R.; Li, H.; Dong, Z.-L.; Gu, H.; Li, S. Achievable rate with closed-form for SISO channel and broadcast channel in visible light communication networks. J. Lightw. Technol. 2017, 35, 2778–2787. [Google Scholar] [CrossRef]
- Ma, S.; Yang, R.; He, Y.; Lu, S.; Zhou, F.; Al-Dhahir, N.; Li, S. Achieving Channel Capacity of Visible Light Communication. IEEE Syst. J. 2021, 15, 1652–1663. [Google Scholar] [CrossRef]
- Sun, S.; Yang, F.; Song, J. Sum Rate Maximization for Intelligent Reflecting Surface-Aided Visible Light Communications. IEEE Commun. Lett. 2021, 25, 3619–3623. [Google Scholar] [CrossRef]
- Ma, S.; Zhang, T.; Lu, S.; Li, H.; Wu, Z.; Li, S. Energy Efficiency of SISO and MISO in Visible Light Communication Systems. J. Lightw. Technol. 2018, 36, 2499–2509. [Google Scholar] [CrossRef]
- Teixeira, L.; Loose, F.; Barriquello, C.H.; Reguera, V.A.; Costa, M.A.D.; Alonso, J.M. On Energy Efficiency of Visible Light Communication Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 6396–6407. [Google Scholar] [CrossRef]
- Cao, B.; Chen, M.; Yang, Z.; Zhang, M.; Zhao, J.; Chen, M. Reflecting the Light: Energy Efficient Visible Light Communication with Reconfigurable Intelligent Surface. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference, Victoria, BC, Canada, 18 November–16 December 2020. [Google Scholar]
- Akanegawa, M.; Tanaka, Y.; Nakagawa, M. Basic study on traffic information system using LED traffic lights. IEEE Trans. Intell. Transp. Syst. 2001, 2, 197–203. [Google Scholar] [CrossRef]
- Komine, T.; Nakagawa, M. Fundamental analysis for visible-light communication system using LED lights. IEEE Trans. Consum. Electron. 2004, 50, 100–107. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | Definitions |
|---|---|
| X-coordinate of the transmitter S as measured from the upper left corner of the IRS | |
| Y-coordinate of the transmitter S as measured from the IRS along the road | |
| Z-coordinate of the transmitter S as measured from the upper left corner of the IRS | |
| X-coordinate of the receiver D as measured from the upper left corner of the IRS | |
| Y-coordinate of the receiver D as measured from the IRS along the road | |
| Z-coordinate of D as measured from the transmitter S | |
| Width of each mirror | |
| Height of each mirror | |
| Edge-to-edge inter-mirror separation distances along the x-axis | |
| Edge-to-edge inter-mirror separation distances along the z-axis | |
| The number of mirrors of each column in the IRS | |
| The number of mirrors of each row in the IRS | |
| Mirror reflection efficiency | |
| Transmitted power | |
| Order of Lambertian emission | |
| Half-power semiangle of an LED | |
| Irradiance angle of the LED from the transmitter S to mirror | |
| Incidence angle of the PD from mirror to the receiver D | |
| Current-to-light conversion efficiency | |
| Physical area of the PD | |
| Optical filter gain | |
| Optical concentrator gain | |
| Refractive index | |
| FOV of the PD | |
| Efficiency of the transmit power amplifier | |
| DC-offset | |
| Amplitude constraint of the signal | |
| The variance of the signal | |
| Responsivity of the PD | |
| Total number of mirrors in the IRS | |
| VLC system modulation bandwidth | |
| The maximum power threshold | |
| The maximum acceptable BER | |
| The maximum number | |
| Expectation operator |
| Parameter | Value |
|---|---|
| 0.62 m | |
| (0.01, 0.01) m | |
| 60 deg. | |
| 35 deg. | |
| 1.0 cm2 | |
| 1.0 | |
| 1.5 | |
| 0.44 W/A | |
| 0.8 | |
| 0.54 A/W | |
| 1.2 | |
| B | 20 MHz |
| Iterations of Bubble Sort Method | Iterations of BSCI Algorithm | |||
|---|---|---|---|---|
| 40 | 168 | 1.7049 | 6363528 | 12 |
| 50 | 168 | 1.7049 | 6313681 | 12 |
| 60 | 168 | 1.7049 | 6242811 | 12 |
| 70 | 168 | 1.7049 | 6144265 | 12 |
| 80 | 168 | 1.7049 | 6004845 | 12 |
| 90 | 191 | 1.7004 | 5812345 | 1 |
| 100 | 270 | 1.6417 | 5546115 | 1 |
| Iterations of Bubble Sort Method | Iterations of BSCI Algorithm | |||
|---|---|---|---|---|
| −90 | 235 | 1.2116 | 6189921 | 12 |
| −94 | 197 | 1.4504 | 6295926 | 11 |
| −98 | 168 | 1.7049 | 6363528 | 12 |
| −102 | 145 | 1.9732 | 6406410 | 12 |
| −106 | 128 | 2.2531 | 6435078 | 12 |
| Iterations of Bubble Sort Method | Iterations of BSCI Algorithm | |||
|---|---|---|---|---|
| 10 | 168 | 1.7049 | 6363528 | 12 |
| 20 | 264 | 1.0795 | 6098778 | 12 |
| 30 | 378 | 0.7442 | 5666661 | 12 |
| 40 | 510 | 0.5422 | 5089645 | 11 |
| 50 | 661 | 0.4108 | 4394130 | 11 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhan, L.; Zhao, H.; Zhang, W.; Lin, J. An Optimal Scheme for the Number of Mirrors in Vehicular Visible Light Communication via Mirror Array-Based Intelligent Reflecting Surfaces. Photonics 2022, 9, 129. https://doi.org/10.3390/photonics9030129
Zhan L, Zhao H, Zhang W, Lin J. An Optimal Scheme for the Number of Mirrors in Vehicular Visible Light Communication via Mirror Array-Based Intelligent Reflecting Surfaces. Photonics. 2022; 9(3):129. https://doi.org/10.3390/photonics9030129
Chicago/Turabian StyleZhan, Ling, Hong Zhao, Wenhui Zhang, and Jiming Lin. 2022. "An Optimal Scheme for the Number of Mirrors in Vehicular Visible Light Communication via Mirror Array-Based Intelligent Reflecting Surfaces" Photonics 9, no. 3: 129. https://doi.org/10.3390/photonics9030129
APA StyleZhan, L., Zhao, H., Zhang, W., & Lin, J. (2022). An Optimal Scheme for the Number of Mirrors in Vehicular Visible Light Communication via Mirror Array-Based Intelligent Reflecting Surfaces. Photonics, 9(3), 129. https://doi.org/10.3390/photonics9030129