1. Introduction
With the expansion of the 5G network construction scale and the innovative development of the industrial internet, the construction of the optical network is marching towards higher speed, large capacities, and long distances [
1]. In the case of long-distance transmission systems, such as submarine optical cables, the accumulated transmission loss, nonlinear effects, and chromatic dispersion (CD) cause the deterioration of high-speed optical fiber system performance. The erbium-doped fiber amplifier (EDFA) is introduced to overcome transmission loss and the optical power is monitored to suppress the nonlinear effect. The CD has become the major obstacle to upgrading the optical network industry [
2]. In a wide-band system (64 GBaud or higher), the inter-symbol interference (ISI) caused by CD extends over more than 150 symbols after 250 km of fiber transmission and preclude long-distance transmission without proper chromatic dispersion equalization (CDE) [
3].
CD has been effectively compensated in the optical and electrical domains. In the optical domain, equipment with large negative CD is mainly used for compensation [
4]. With the development of high-speed analog-to-digital (ADC) converter and coherent detection techniques, digital coherent receivers can compensate for large amounts of accumulated CD in the electrical domain at negligible cost through digital signal processing (DSP) methods [
5,
6,
7]. A series of strategies for achieving CDE in the time domain (TD) and frequency domain (FD) has been verified in commercial DSP [
8,
9,
10,
11,
12,
13,
14,
15].
Frequency domain chromatic dispersion equalization (FD-CDE) involves overlap-save (OLA) or overlap-add zero padding (OLA-ZP) methods, and the complexity evolves with
, where
is the block size of fast Fourier transform (FFT). The complexity of time-domain chromatic dispersion equalization (TD-CDE) is
, where N is a variable related to the CD to be equalized. The overall performance of FD-CDE is better than that of TD-CDE in long-distance fiber links [
16], so it’s considered to be the most suitable choice for commercial coherent receivers [
17]. However, FD-CDE requires time-frequency conversion of the input sequence, which may cause time aliasing. In addition, poor interaction with nonlinear components and other TD modules limits the reduction of energy consumption [
18]. At present, the CDE module consumes a lot of energy in DSP, which is an important factor in restricting compact transceiver’s upgrading. In the model prediction of 2400 km 100 Gbit/s DP-QPSK coherent optical communication system compensating 30 ps mean differential group delay (DGD), the CDE module accounts for 36% of the receiver DSP energy consumption [
19]. So, to reduce the hardware requirements and improve the coherent receiver efficiency, it’s necessary to reduce the complexity associated with CDE.
Since the entire equalization process of TD-CDE is carried out in TD, which avoids the possible problems in FD-CDE. Savory proposed the FIR CDE filter in a closed-form in the TD [
20]. Four main drawbacks need to be revisited as (I) the filter needs to equalize the accumulative CD in the full frequency band, (II) the performance of the filter will deteriorate if the length of the filter is increased, (III) the length of the filter is positively correlated with the CD to be compensated, and (IV) the compensation quality is poor under the high-order modulation format. Driven by this motivation, some FIR filter-based CDE methods have been proposed to reduce complexity [
21,
22]. From an implementation point of view, the main challenge to reduce the power consumption of the CDE module is the length of the filter. Eghbali uses the energy convex minimization method of the complex error between the frequency response of the actual CDE filter and the ideal CDE filter, and the FIR filter is designed in the least square (LS) sense to compensate the accumulative CD only in the effective frequency band [
23]. Even though the band-limited CDE significantly shortens the length of the filter compared with [
20], the total amount of calculation derived from it is very high, and the proof is given in
Section 2. Despite many drawbacks, the development prospects in this field are still promising.
In this paper, we propose two new methods for constructing FIR filters to compensate accumulative CD, and both ways seek the optimal weights as filter tap coefficients. In our work, we first build a set of FIR filters. When the FD response of the constructed FIR filter is infinitely close to the ideal FD-CDE filter, the filtering performance of the former is also optimal. One of the methods is based on the singular value decomposition least squares (SVDLS) to obtain the optimal weight. This method uses the relationship between the two FD responses to construct a linear overdetermined equation and uses the SVDLS method to find the optimal solution as the tap coefficient of the filter. Another way is to use the adaptive mutation particle swarm optimization (AMPSO) algorithm to quickly find the optimal weights through iterative optimization calculations so that the two FD responses reach the best approximation. The simulation results show that both types of new FIR filters can effectively implement CDE. The proposed method is compared with the standard TD-CDE, and the results show that the proposed filter performs better and makes up for the four main drawbacks mentioned above. Compared with FD-CDE, the proposed filter requires fewer taps under the same BER.
The rest of this paper is organized as follows. In
Section 2, the existing methods of FD-CDE and TD-CDE are briefly introduced, the FIR filter FD response function in the LS sense is derived, and proves that the way in [
23] has redundant calculations. The theoretical formulas behind the two types of FIR filters are given, and the complexity is analyzed. In
Section 3, numerical simulations are carried out, and the proposed methods are compared with TD-CDE and FD-CDE in the full frequency band and the narrow frequency band. In
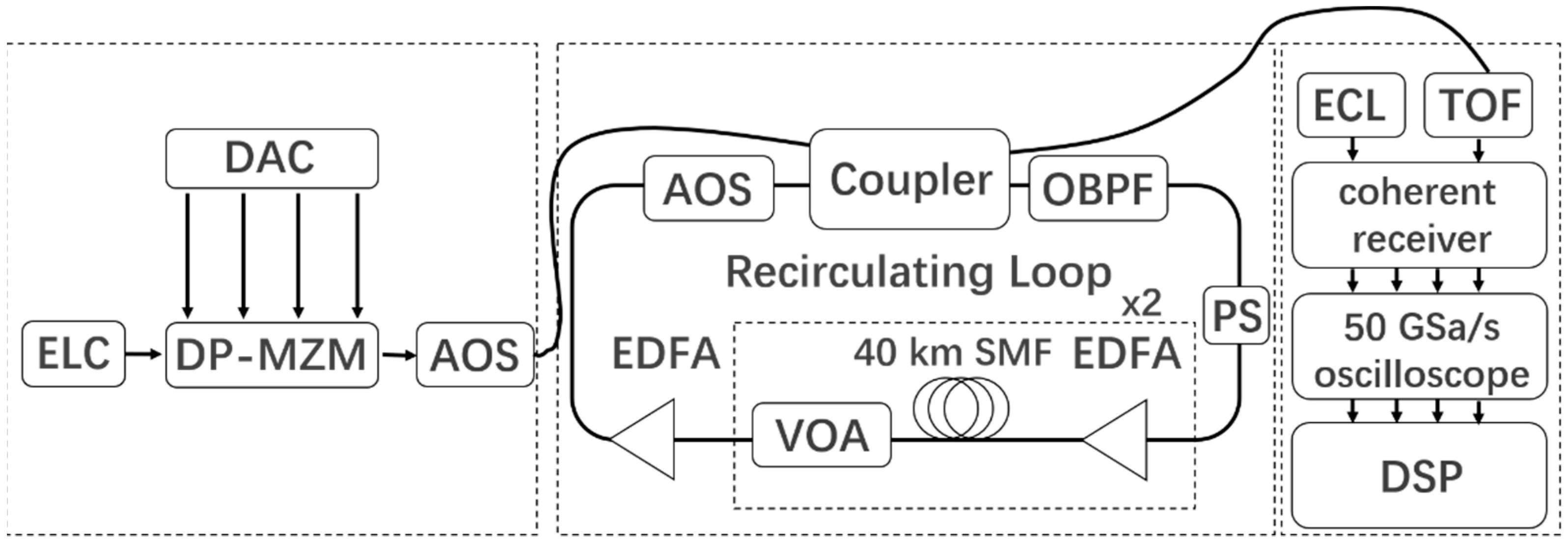
Section 4, we analyzed the performance of the two proposed CDE FIR filters and TD-CDE filters on the experimental platform of 28 GBaud PDM-16 QAM. In
Section 5, the application scenarios of the two proposed CDE schemes are discussed. Finally,
Section 6 gives the conclusion.
2. Principle
The following partial differential equation can model CD’s influence on the signal envelope
to simplify the structure of the coherent receiver, which is also the basis of all CDE algorithms [
24].
where
is the propagation distance,
is the normalized time parameter,
,
,
are the CD coefficient, wavelength, and the speed of light. Taking the FFT of Equation (1) to acquire the FD transfer function
given by,
here,
represents the digital frequency with any frequency component. Invert the sign of the
in Equation (2), and the CD can be compensated by an all-pass filter to approximate the ideal frequency response as,
In addition to directly equalizing the CD in FD, the output can be obtained by convolution of the input sequence and the impulse response. Perform the inverse fast Fourier transform (IFFT) of Equation (3) to acquire the TD complex impulse response as,
where
represents the round-down operation,
is the sampling interval, and
is the length of the filter
given as,
2.1. Least-Squares FIR Filter
Consider a complex FIR digital filter of length is
and its unit impulse response given by,
with a frequency response as,
Note that in the derivation of Equation (4), to avoid aliasing in the FD, TD truncation is required, limiting the number of taps. The band can be limited to Nyquist frequency
to overcome this limitation, set the frequency range
, and the square error
between the desired and the actual response given by [
25],
Using gradient descent method to find the extreme value as,
hence, we have the tap coefficients T in an LS sense as,
taking into account the
n-order complex tap coefficients, Equation (10) can be equivalent to,
Simplify Equation (11) given by,
taking
as
, then Equation (12) is expressed as,
according to the Gaussian error function, which is defined as,
Note that if
is a complex variable, we obtain the error function in complex form as,
Incorporating Equation (15) into Equation (13), we can obtain the optimal filter tap coefficient in the sense of LS as,
Comparing Equation (16) with Equation (9) in [
23], it’s obvious that the computational complexity of the former is superior to the latter. Even though we reduce the total computation, which still involves solving the Gaussian error function, etc. We require further reduce the computation complexity.
2.2. Singular Value Decomposition Least-Squares FIR Filter
In this part, we adopt the idea of approximation to acquire the best match between the desired and actual response.
We note that for Equation (7), it can be rewritten as
, where
and
are, respectively, given by,
Expressing
and
with real and imaginary parts, then we can acquire as,
Considering that the pulse shaping filter will limit the effective bandwidth of the signal
, set frequency range
. Taking
sampling points within the effective bandwidth, we can acquire as,
The FD response of the ideal filter is rewritten into the form of real and imaginary parts, and
points are sampled in the same bandwidth, then it can be written as,
Combining Equation (19) and Equation (20), the real and imaginary parts of the FD response of the constructed FIR filter are, respectively, approximated to the real and imaginary part of the FD response of the ideal filter, and we can acquire as,
Equation (21) can be further simplified given by,
Equation (22) is the constructed overdetermined equations given by,
For the overdetermined problems and generally non-uniform equations, the equations have no solution. Then turn to solve the LS problem, that is to minimize
, the LS solution can be obtained as,
There are two main problems in the solution method mentioned above, such as (I) involves the inversion operation of
-dimensional matrix, which requires a large amount of calculation, (II)
may be irreversible. To overcome the above limitations, we propose a method based on SVDLS. In contrast with eigenvalue decomposition, which can only be applied to square matrices, any matrix
can be SVD to,
where
and
are orthogonal matrices,
,
is a diagonal matrix, and it’s the value of matrix
, which is completely determined by
and independent of
. Next, we reconsider the LS problem given by,
where
can be disassembled into
, that
is the first
-column matrix of
, and then obtained as,
It’s obvious that when
takes the minimum value, if and only if
. The SVDLS solution can be obtained as,
According to the SVDLS method, there must be a solution. Both and are orthogonal matrices, so the transposed matrix is equal to the inverse matrix. is a diagonal matrix, and the singular values in the matrix in order from large to small, decay rate is particularly fast. The sum of the top 10% of the singular values usually accounts for more than 99% of the total, so we can further reduce the size of the matrix by discarding all the singular values below a certain threshold.
2.3. Adaptive Mutation Particle Swarm Optimizer FIR Filter
In the problem of parameter fitting, the LS method is often used, but when the function parameters are too large, the iteration times will be too many, and it’s easy to fill into the local optimal solution. Therefore, modern optimization algorithms are used in parameter fitting, commonly used genetic algorithms (GA) and particle swarm optimization (PSO) algorithms. PSO converges better than GA, no coding and crossover operation are needed, and that’s easier to implement with fewer parameters.
2.3.1. Traditional Particle Swarm Optimization Algorithm
The traditional PSO algorithm is derived from the study of bird predation behavior and finds the optimal solution through cooperation and information sharing among individuals in the group [
26]. All particles are a possible solution in search space. Each particle performs an iterative update of its speed and position according to the individual extreme, global extreme, and its own experience. The position is evaluated by the fitness function of the algorithm. Each dimension of the particle has the limit of allowable value, and the particle that satisfies the constraint condition is the effective particle. Some parameter definitions in the PSO algorithm are list in
Table 1.
The iterative update equation of the particle’s position and velocity given by [
27,
28]
where
denotes the inertia weight;
and
denote the learning factors;
and
denote the random numbers distributed between 0 and 1. Traditional PSO algorithms often fall into the situation of slow convergence speed, premature convergence, and weak local searchability in the later search stage, so it isn’t easy to obtain the global optimal solution.
2.3.2. Adaptive Mutation Particle Swarm Optimization Algorithm
In this paper, by improving the PSO algorithm, a new PSO algorithm is proposed to overcome the shortcomings of the traditional PSO algorithm. The improvement is embodied in two aspects: (I) adjust inertia weight based on particle fitness to improve the convergence speed of the algorithm, (II) use GA to introduce mutation operations to increase the activity of the population and avoid the algorithm falling into local convergence.
Different particle search capabilities are need in the process of population exploration. Traditional PSO algorithm usually adopts linear decreasing weight method given by,
where
is the weight of inertia,
is the current iteration number, and
is the maximum possible iteration number. In the process of optimization, the distance between the particle and the optimal solution is different. Only the search time is taken into account to adjust the weight without involving the state of the particle itself, which affects the accuracy of the optimal solution. Therefore, we add the fitness of the particle to the weight adjustment strategy and defined as,
Here, and are the maximum and minimum of the inertia weight, and are the sum and average of the fitness of the particles in the iteration of the population, is the fitness of the particle at the iteration of the population. From the global exploration process perspective, the particle swarm needs to fly in a large range in the early stage, and the is larger. As the optimal solution range shrinks, the corresponding is smaller to guarantee accuracy. From the perspective of local search, particles with better fitness require weaker exploratory power than those with worse fitness and require small .
Compared with the traditional methods that adopt the strategy of fixed weight or change the inertial weights according to the exploration time, we proposed a method of dynamically adjusting the inertial weights based on the particle fitness, it can not only take into account the global space exploration capability and the accuracy of the local searching solution, but also avoid the violent oscillation of particles near the optimal solution, so it has stronger convergence ability and searching efficiency.
The mutation strategy of GA is introduced into the particle search process, which can constitute interference factors to restrain the traditional method from falling into premature and increase the diversity of the later population, increase the scale of the particle in the search space, and improve the ability of the algorithm to jump out of local optimum. On the one hand, the mutation is introduced in the iterative update of the particle position vector, and Equation (32) is replaced with Equation (29) as,
where
is the dimension of the particle,
and
are the upper and lower boundaries of the particle position vector, and
is the constant. On the other hand, the Gaussian probability distribution is used to perform a positional variation on the relative dimensions of a certain probability particle, and the mutation proceeds given by,
The introduction of Gaussian mutation may allow particles to escape the local minimum and enhance the population’s vitality.
2.3.3. FIR Filter Design Based on an Improved Algorithm
Applying the AMPSO algorithm to the FIR filter design, this study uses an overdetermined system of linear equations (given by Equation (23)) as the fitness function. The flow diagram of the design method is shown in
Figure 1, with each step is as follows.
Step 1: data preprocessing. Calculate the fitness function Equation (23), and the solution process is the same as the previous chapter.
Step 2: parameter initialization. The maximum number of iterations, population size, inertia weight, learning factor. Coding for all particles and random initialization of position and velocity.
Step 3: update the particle status. Calculate the fitness value of the particle, adjust the particle inertia weight according to Equation (31), the position vector and velocity vector of the particle is updated by Equations (29) and (32), and perform boundary condition processing.
Step 4: fitness assessment. Recalculate the fitness of the current particle, update the individual extreme value of all particles, and store the optimal individual in the global optimal .
Step 5: termination of condition review. If the current global optimum satisfies the accuracy or reaches the maximum number of iterations, jump out of the iteration and go to step 8. Otherwise, it moves to the next step.
Step 6: mutation. Perform mutation operation on the position vector of the particle. If the fitness after mutation is better, keep it, otherwise cancel the current mutation operation.
Step 7: repeat. Update the number of iterations and return to step 3.
Step 8: output the results. The global optimal particles are used as the coefficients of the FIR filter given by,
2.4. Implementation Complexity
Usually, the complexity we discuss includes design complexity and implementation complexity. Design complexity refers to the amount of calculation that needs to be implemented to obtain the weight of the digital filter, and implementation complexity refers to the amount of work required for the digital filter to achieve equalization. In coherent optical communication, the weight of the CDE filter needn’t be changed frequently, and the main workload comes from the implementation process of the CDE, so we mainly discuss the implementation complexity.
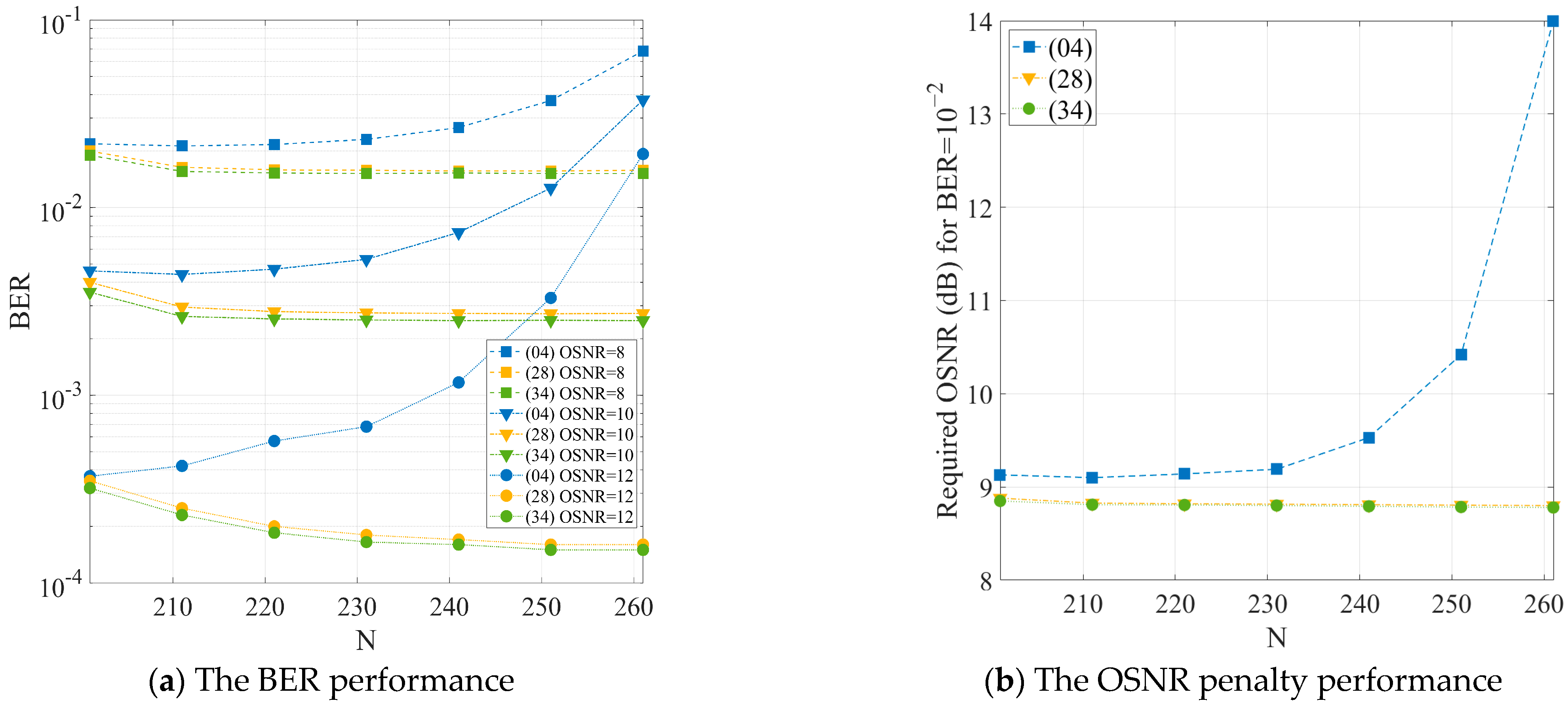
In TD-CDE, the implementation complexity of the filter is , where is the number of FIR filter taps, and is positively correlated with the accumulated CD in the fiber channel. Therefore, for long-haul fiber links, TD-CDE requires more computing resources. In the numerical simulation of the third chapter, we have analyzed that compared with the filter in (4), the filter (28) and (34) that we designed on the finite frequency band achieve the same BER performance, the number of filter taps required is significantly reduced. From the perspective of the amount of calculation, the implementation complexity of the filter we proposed will be lower than the filter in (3). So we can further infer that as the transmission distance increases, the difference in the number of taps between the filter we designed and the filter in (3) will gradually increase, and the reduction of the filter length is always beneficial.
5. Discussion
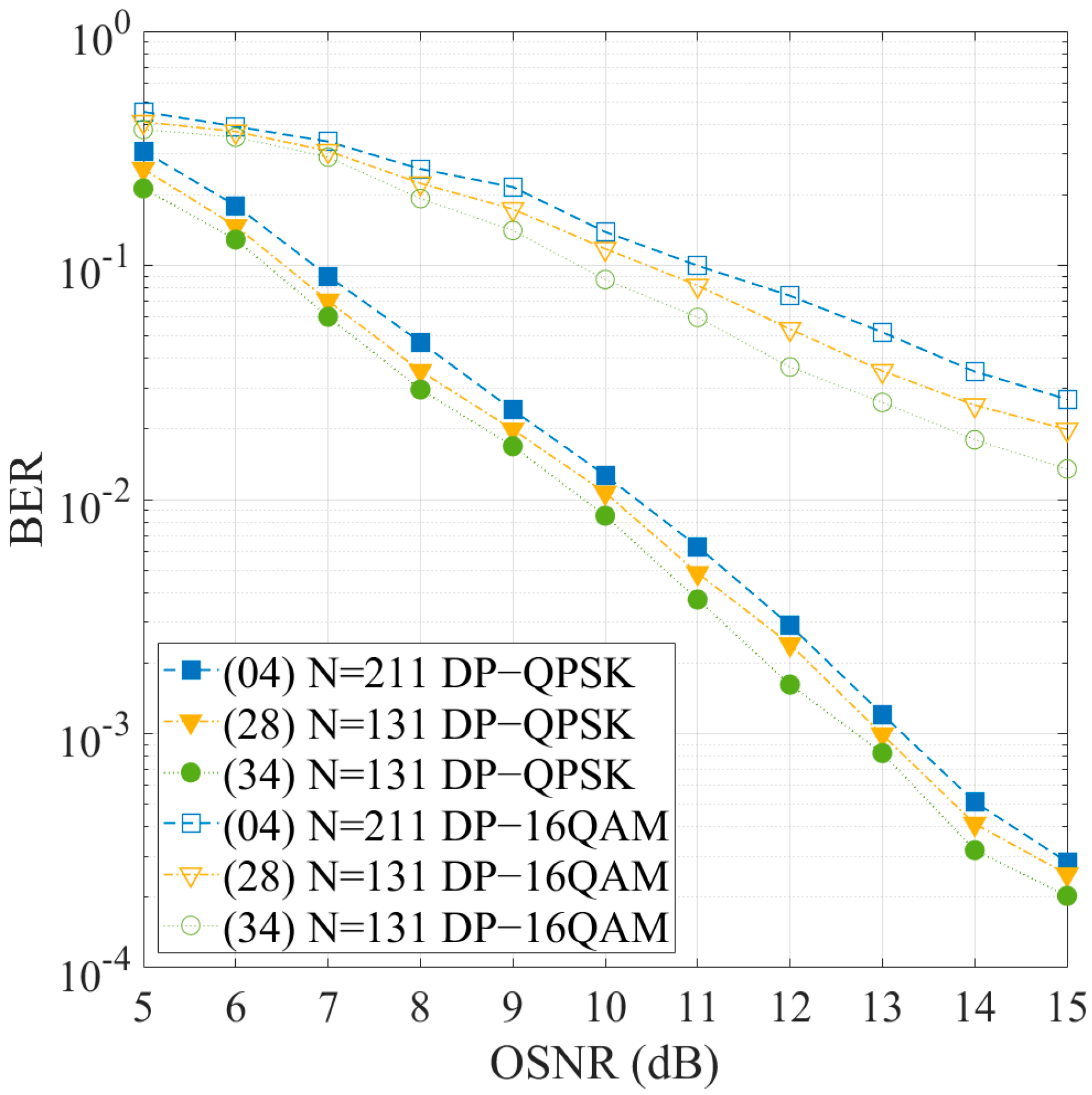
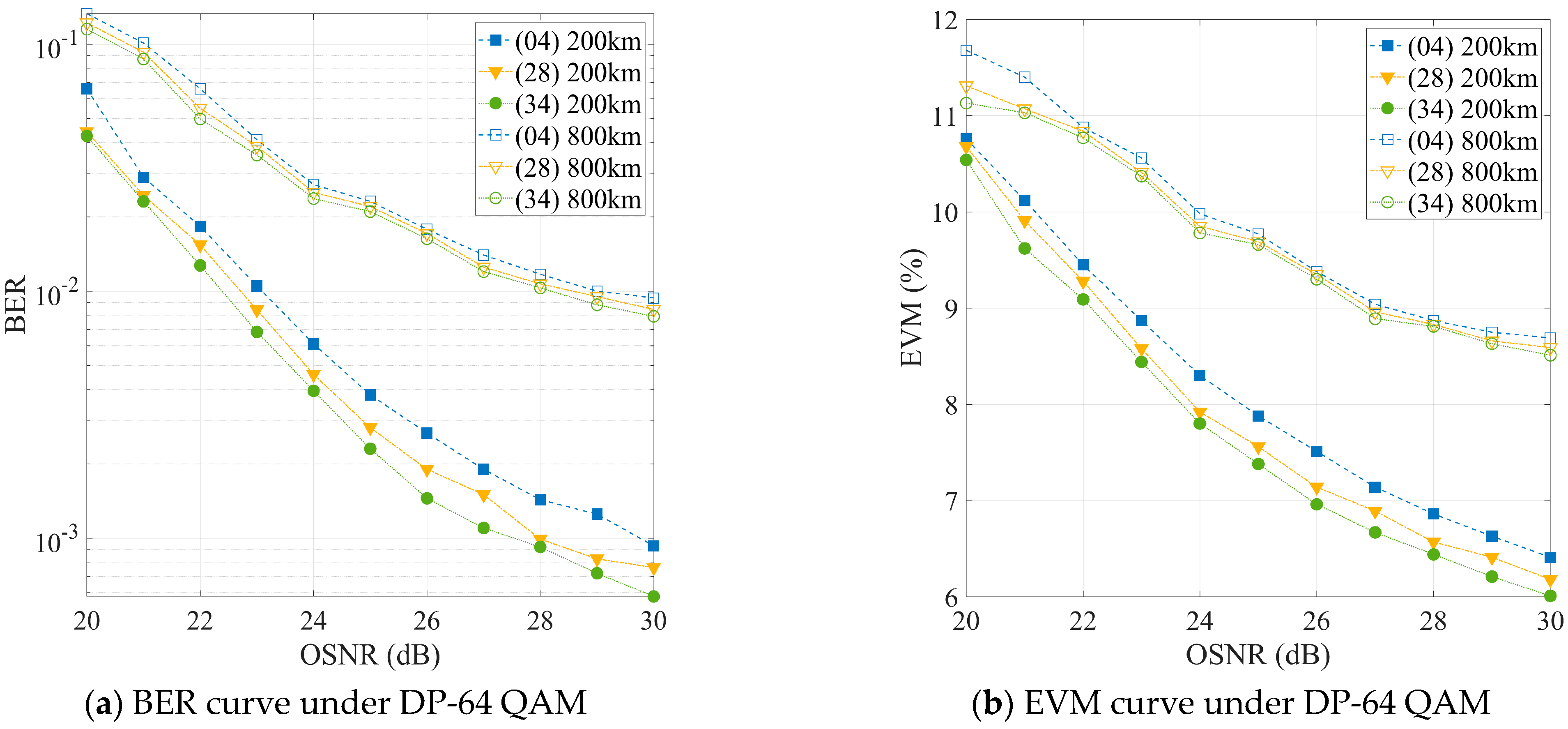
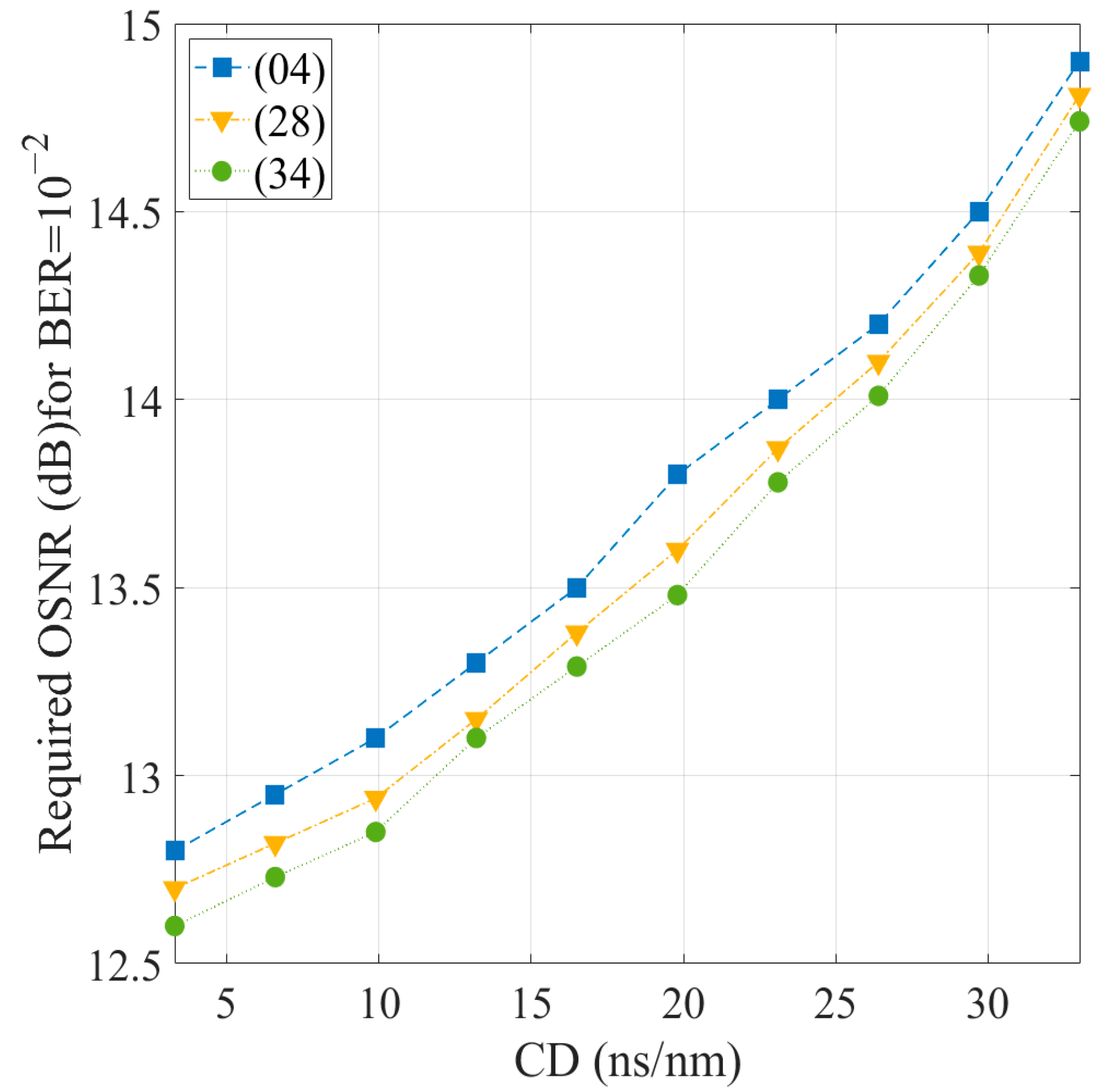
From the results of simulation and experiments, the filter in (28) and the filter in (34) can achieve better CDE, and under the same filter length, the latter’s performance will be better. Even though we mainly discuss the implementation complexity, compared between the two proposed schemes, because the particles need a certain amount of exploration time to find the optimal solution, the filter design complexity in (34) will be higher than (28). Moreover, when the length of the filter increases, it means that the dimensions of the particles, the number of populations, and the number of iterations are best also growing, which requires more search time to obtain the best solution. In summary, for short-distance communication conditions, we can use the CDE filter based on AMPSO. When the transmission distance increases, the CDE filter design based on SVDLS is more appropriate.
6. Conclusions
In this study, we proposed two schemes for linear damage equalization. The proposed method is suitable for linear modulation, including QPSK, 16 QAM, and 64 QAM, using AMSPO and SVDLS filter structures as DSP impairment equalization algorithms to deal with the CD in coherent optical communication systems. We provide simulation examples to compare with the widely used TD-CDE and FD-CDE filters. The results show that due to the influence of the pulse shaping filter, under the same accumulative CD, the two filter schemes we proposed require fewer taps than the existing filters, which reduces the complexity and cost of implementation. The two CDE schemes are evaluated on the 28 GBaud PDM-16 QAM experimental platform, and compared with the TD-CDE, the simulation results verify that the two proposed design schemes have lower SER.
We also compared the two proposed schemes. Considering factors such as equalization effect and design complexity, the application scenarios of two CDE schemes are given. In summary, the proposed methods are a promising solution for CDE.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}