Intelligent Matching of the Control Voltage of Delay Line Interferometers for Differential Phase Shift Keying-Modulated Optical Signals


Abstract
:1. Introduction
2. Related Works
3. Principles
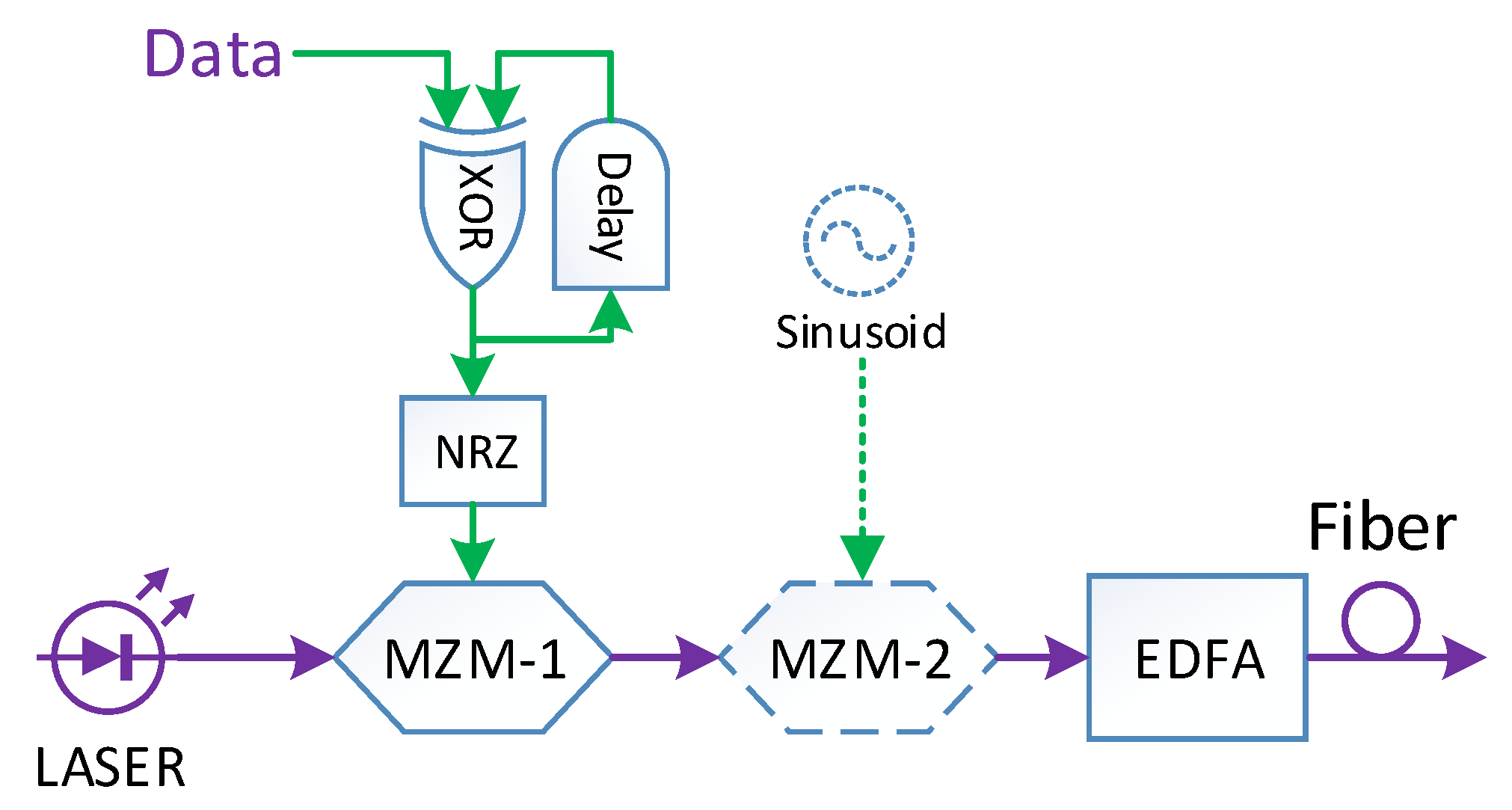
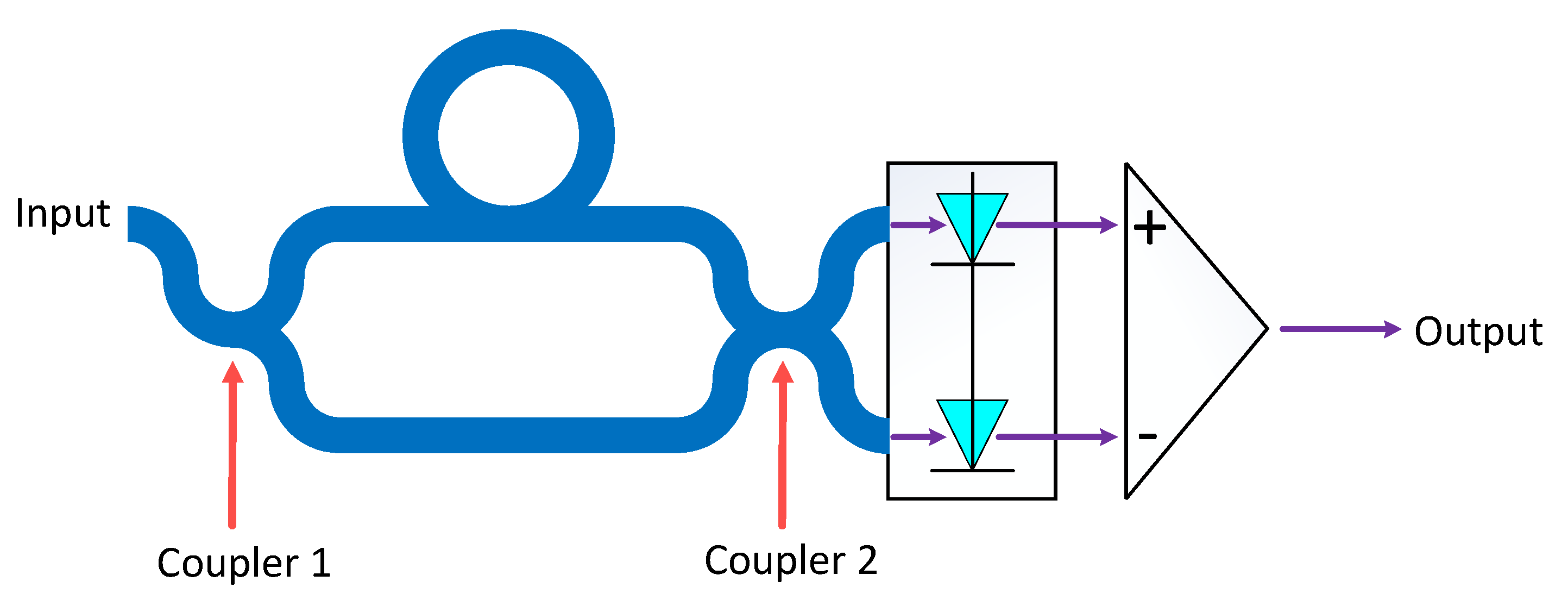
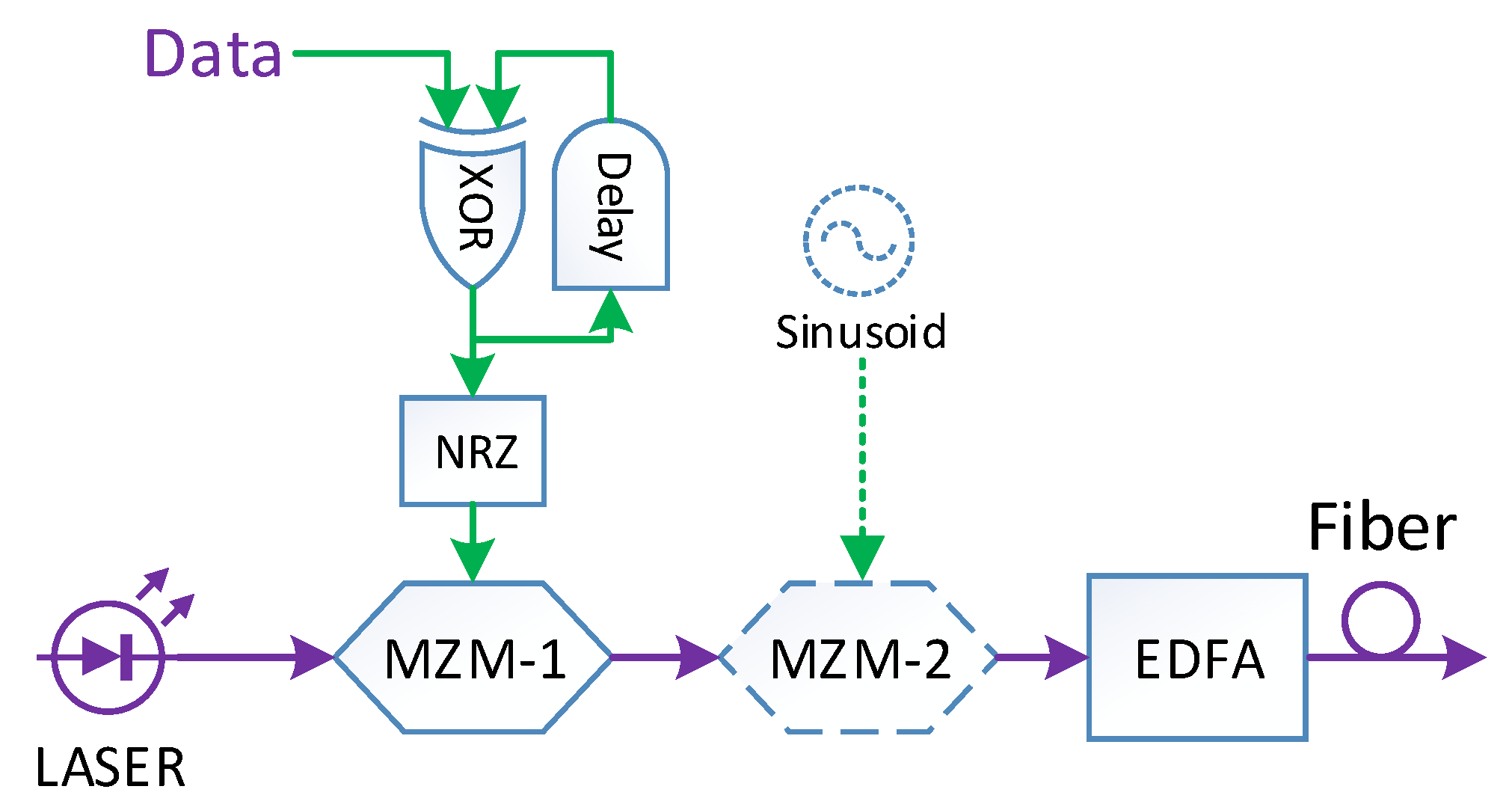
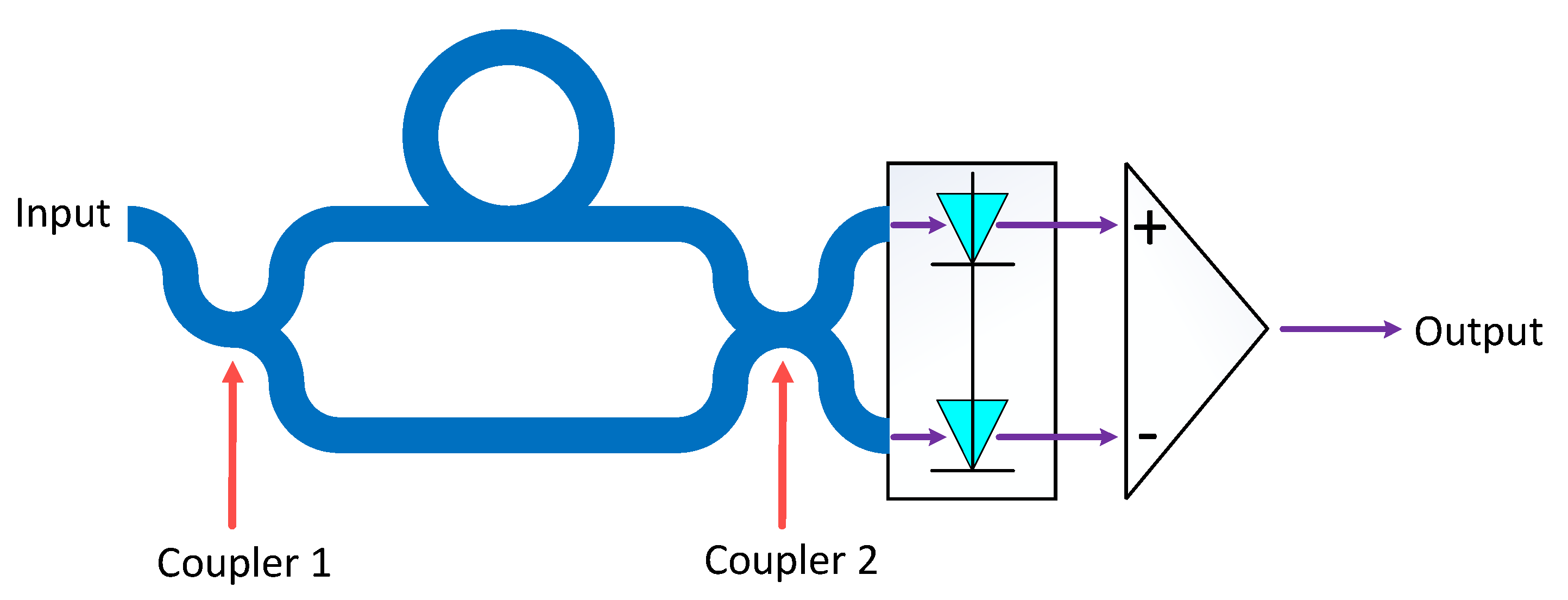
3.1. DPSK Modulation and Balanced Detection
3.2. Phase-Shift Control of DLI
4. Optimal DLI Control Voltage Resolving Based on FNN
4.1. Feasibility Analysis
4.2. Algorithm Model
4.3. Tranning the FNN
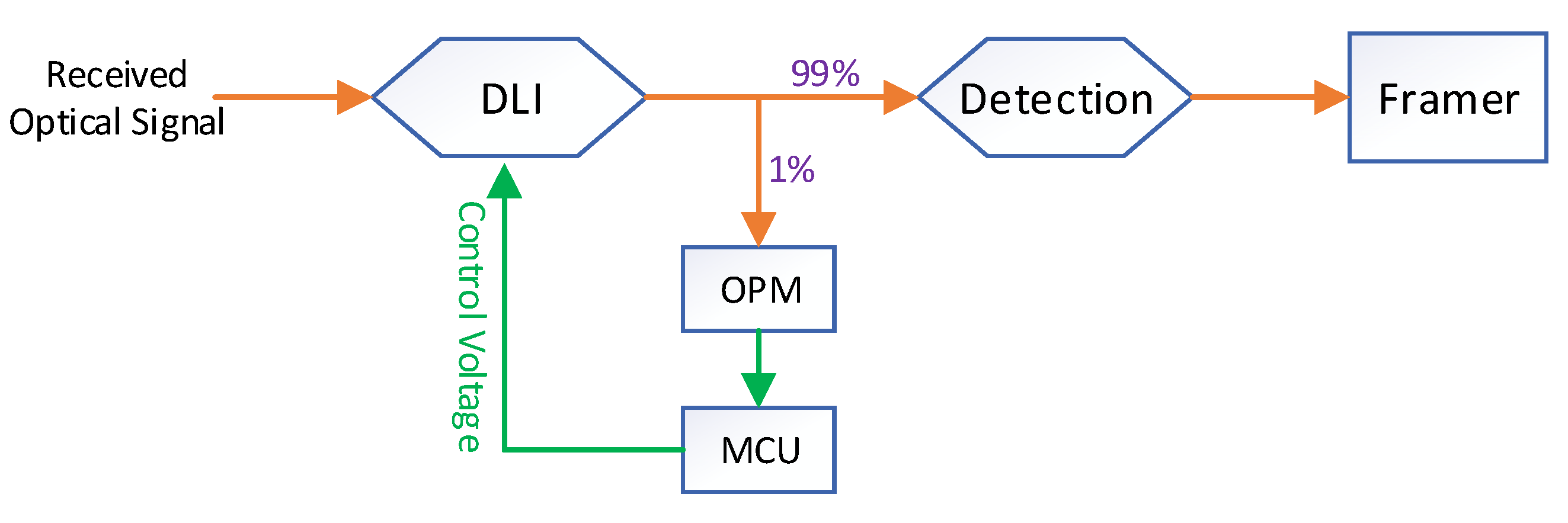
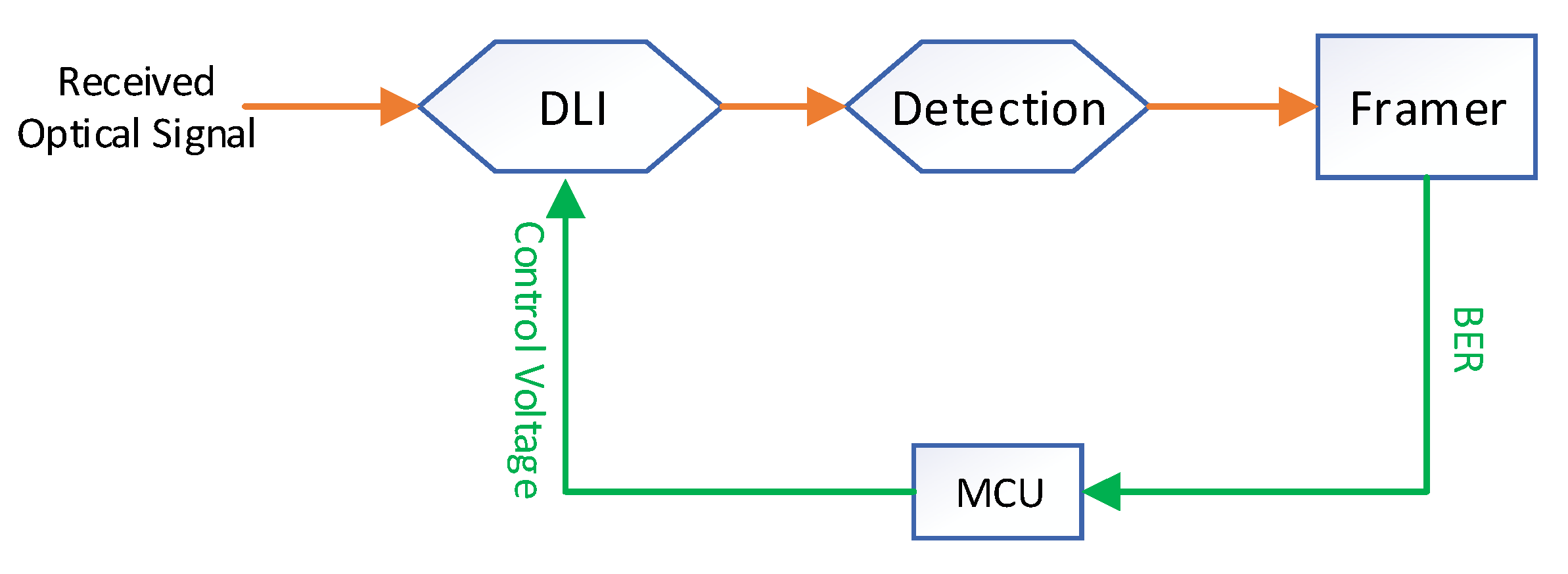
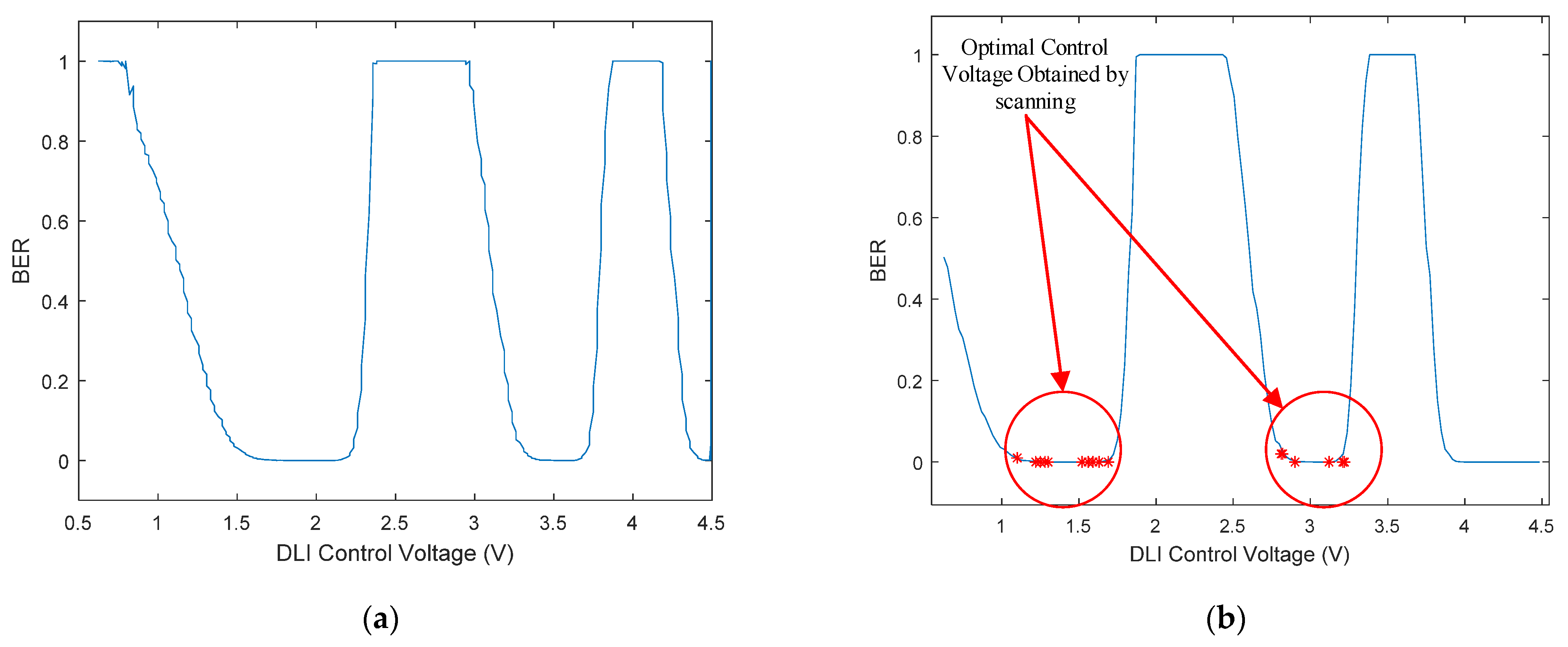
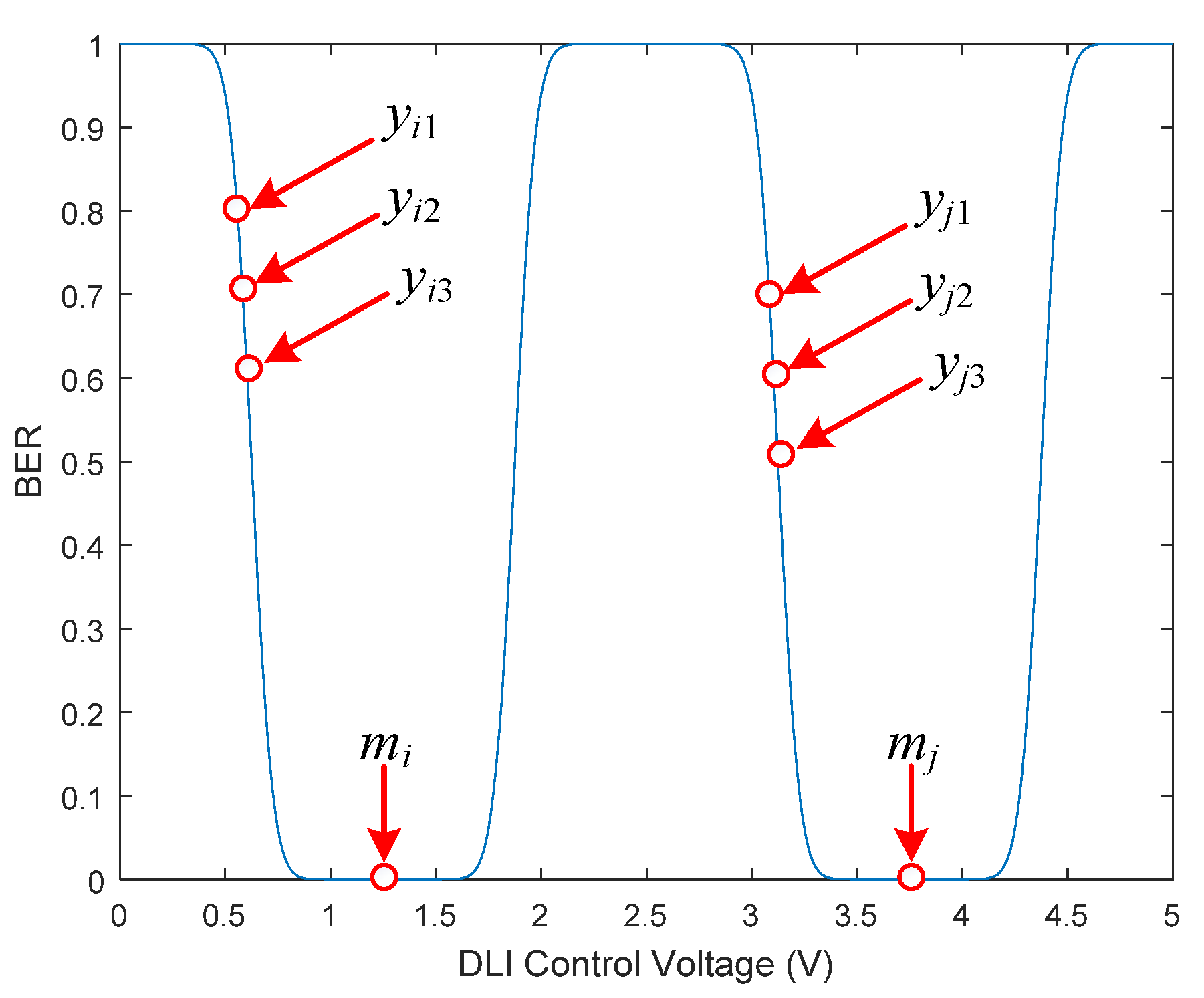
- Scan the whole range of the DLI control voltage and obtain the BER values on all of the test points. The control voltage values and the corresponding BER values are represented by the vector v and e, respectively.
- Select the data in v and e to construct the training sets X and Y, respectively, and follow the rules below:
- 3.
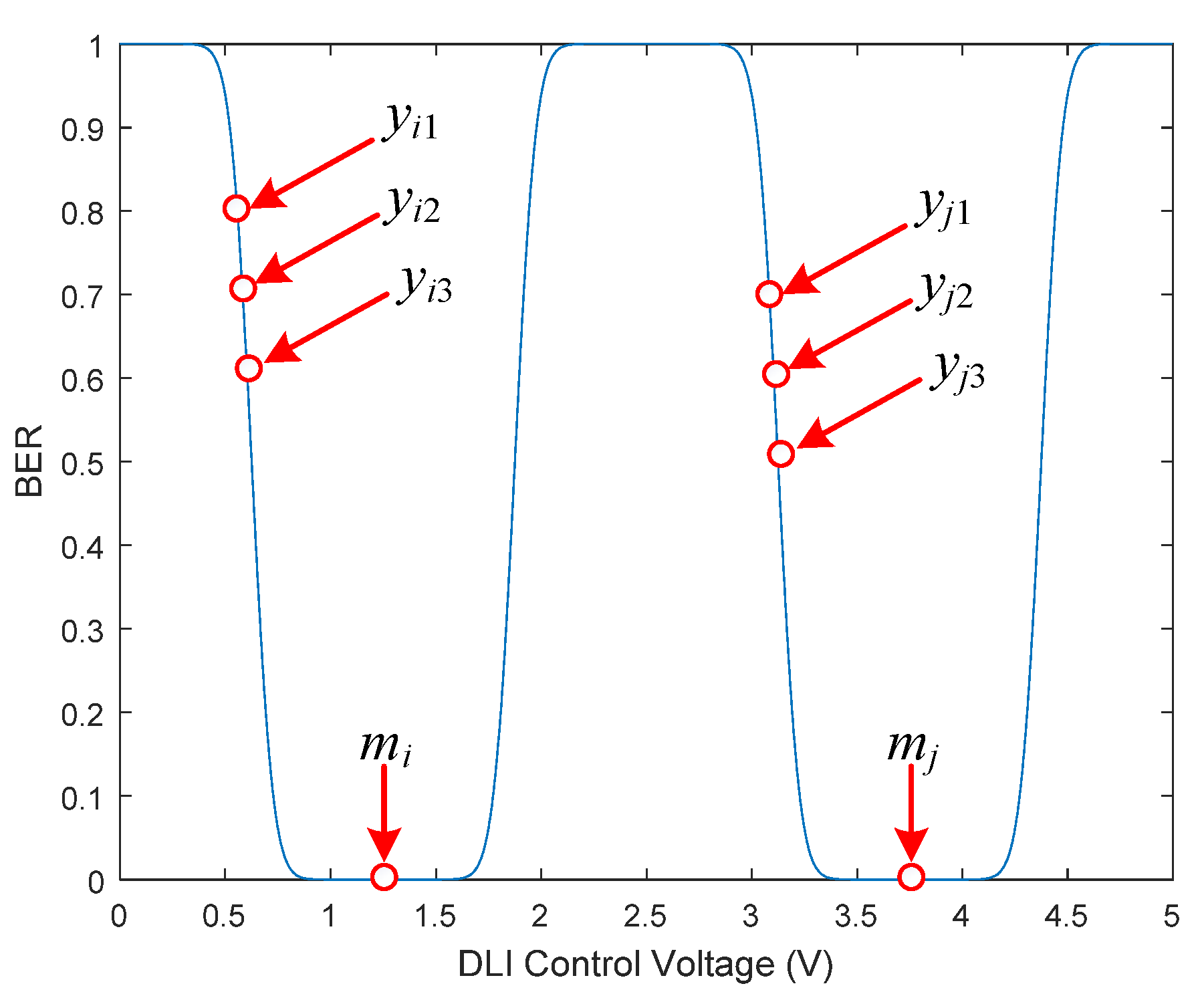
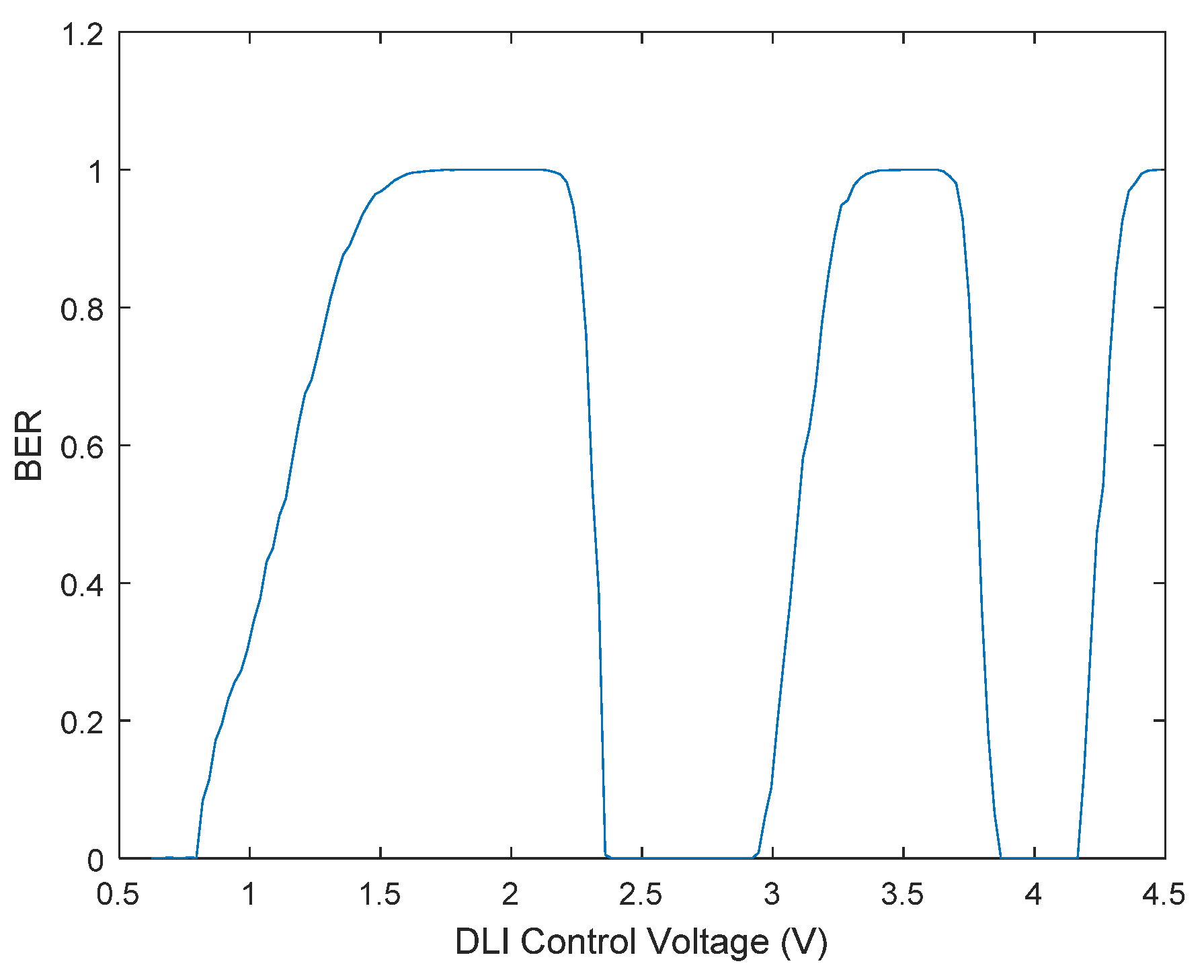
- Mark the local minimum values in y nearest to each row in Y, as shown in Figure 8. The marked values consist of a vector, which is represented by M as follows:
- 4.
- Make the target vector T according to the marked points as follows:wherewhere denotes the control voltage corresponding to the marked BER value .
- 5.
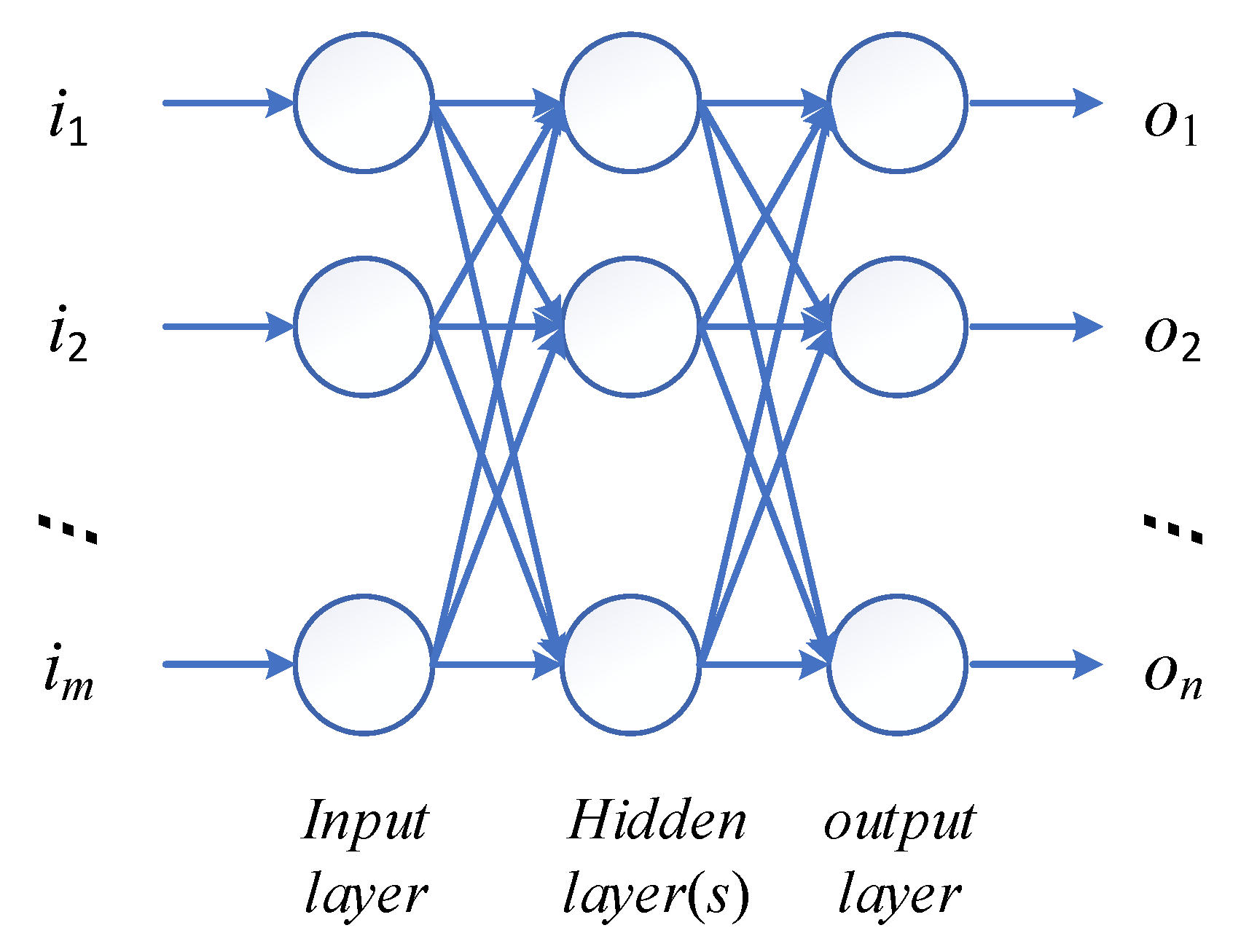
- Train the FNN described in Section 3.2 based on matrix Y and vector T, where each row in Y is an input vector and the corresponding element in T is the respective target. The training data pairs are also shown in Table 2.
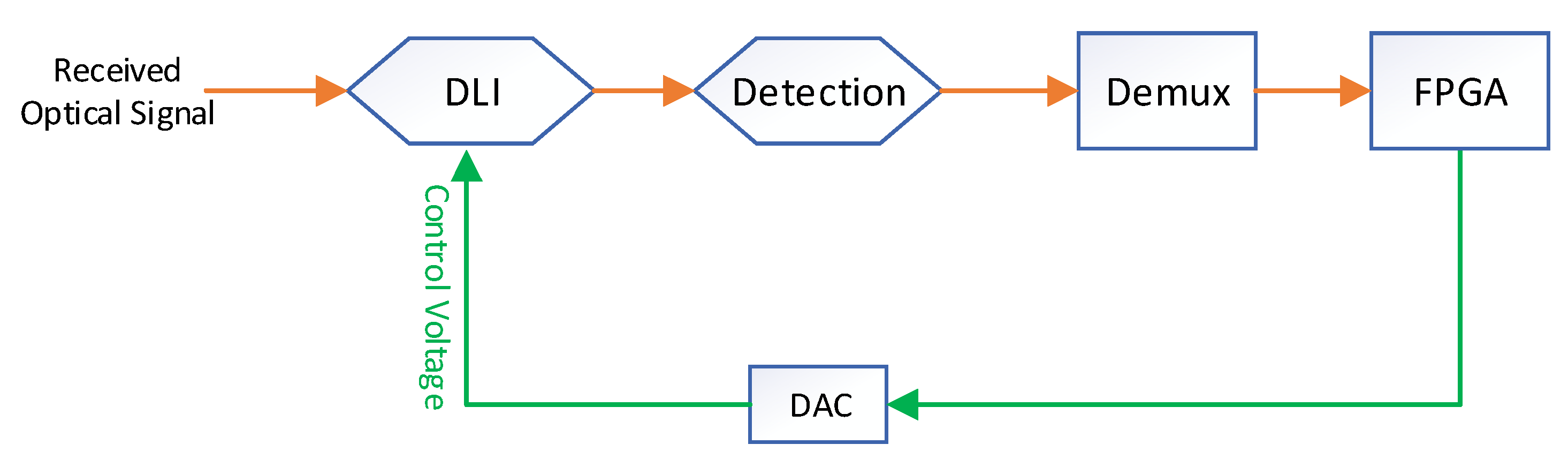
4.4. Implementaion of the Trained FNN
- 1.
- Set a starting control voltage to start a searching procedure. Most commercial DLI devices have better linearity and performance in the middle part of the whole control voltage range, so we suggest setting the starting position at 1/4 of the maximum control voltage. For example, if the control voltage of a DLI is 0 to 5 V, we can set the starting position at about 1.2 to 1.5 V.
- 2.
- Scan the DLI control voltage with the fixed interval, which is set the same as it was in the training procedure. For most commercial DLI devices, 100 mV is a generally suitable interval value.
- 3.
- Test the BER at each control voltage while scanning. If three continuous tested BER values are descending, we use the corresponding three control voltage values (represented by the vector ) as the inputs of the FNN and obtain the output (represented by ).
- 4.
- Let and set the control voltage of the DLI by .
- 5.
- Check the BER on the control voltage to judge whether the demodulation performance satisfies the system requirements. If the BER is higher than the threshold, we make minor adjustments to the control voltage near to revise the predicted value.
5. Simulation and Implementation
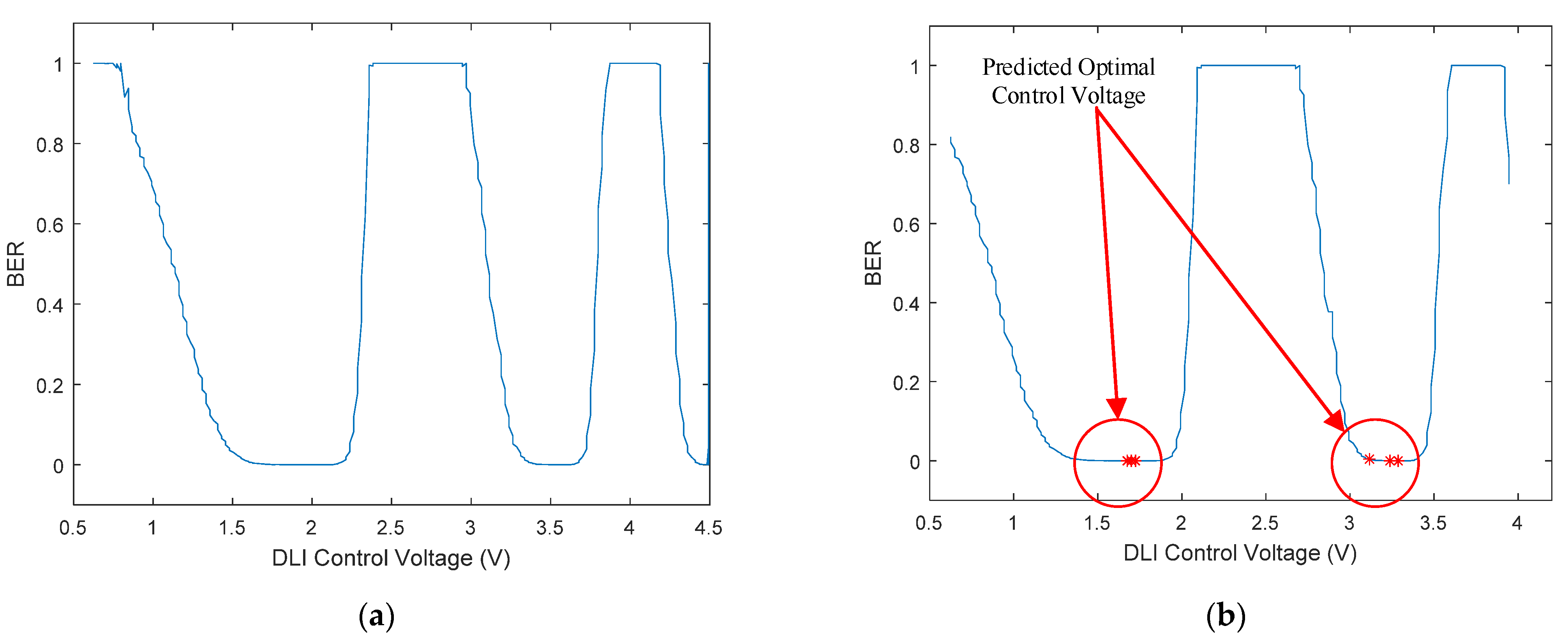
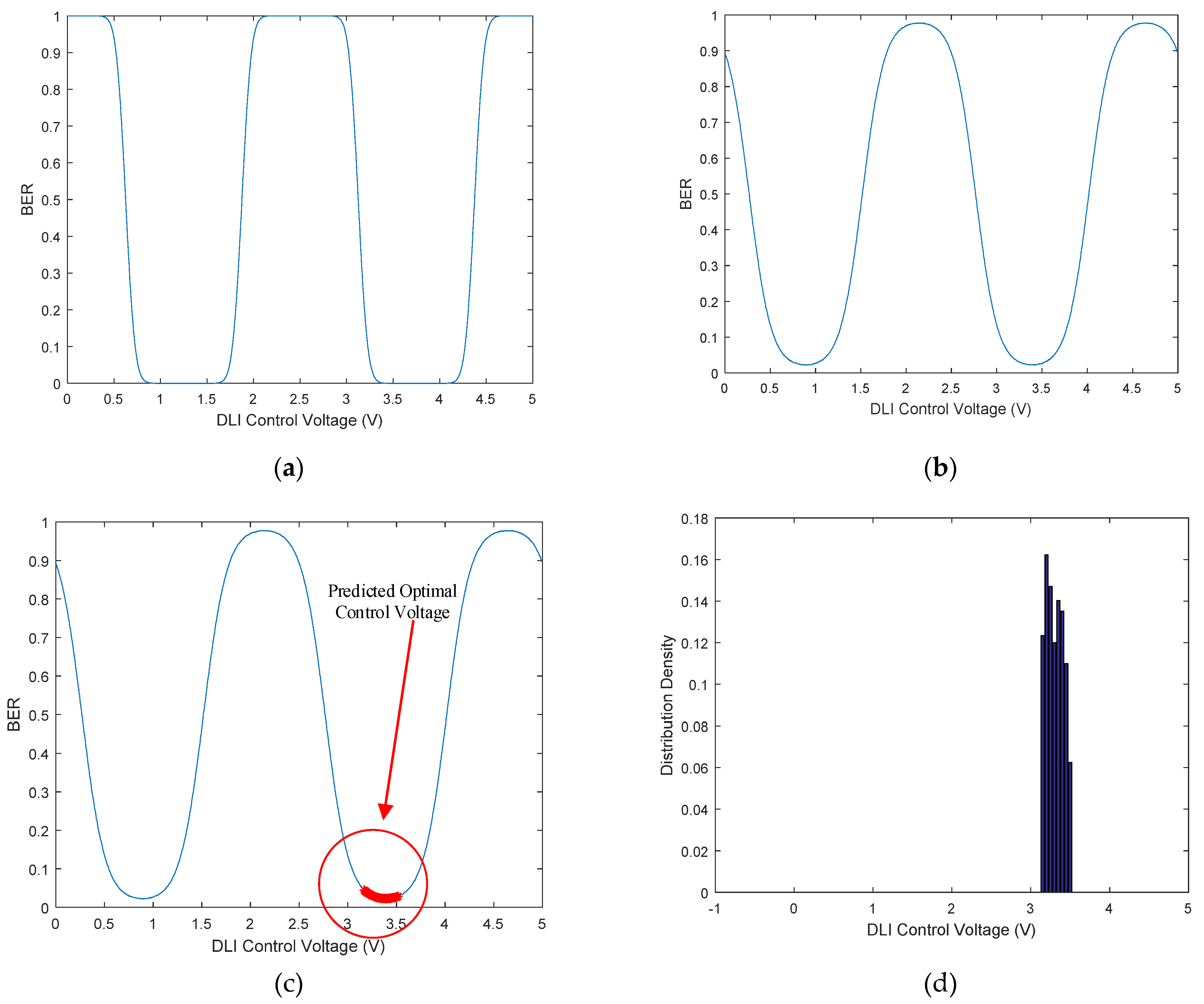
5.1. Simulation Results
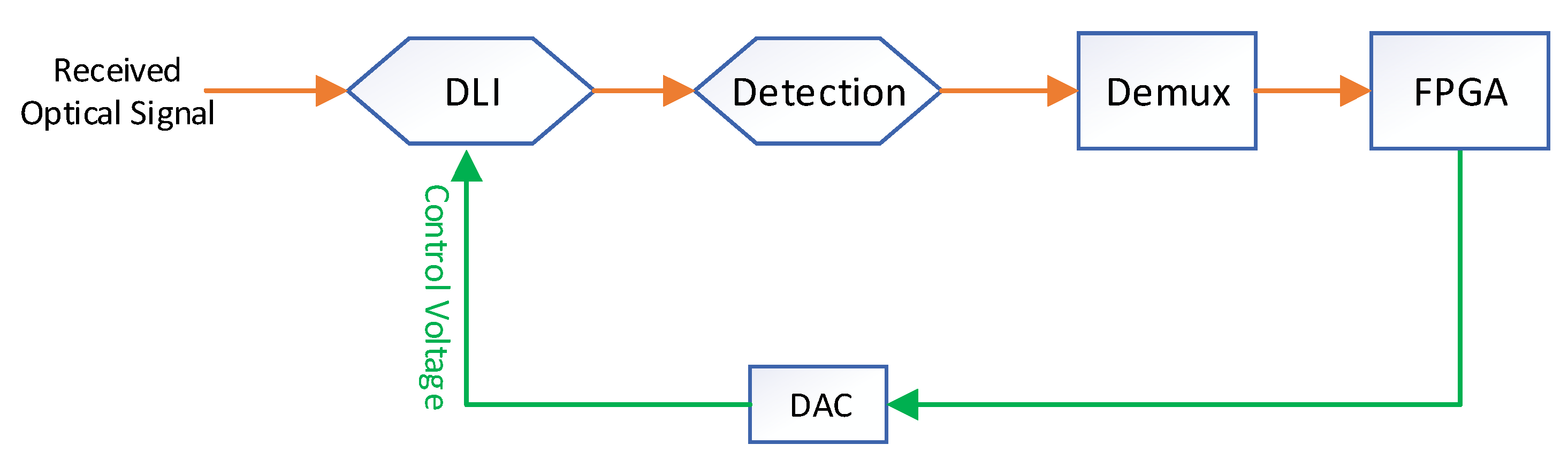
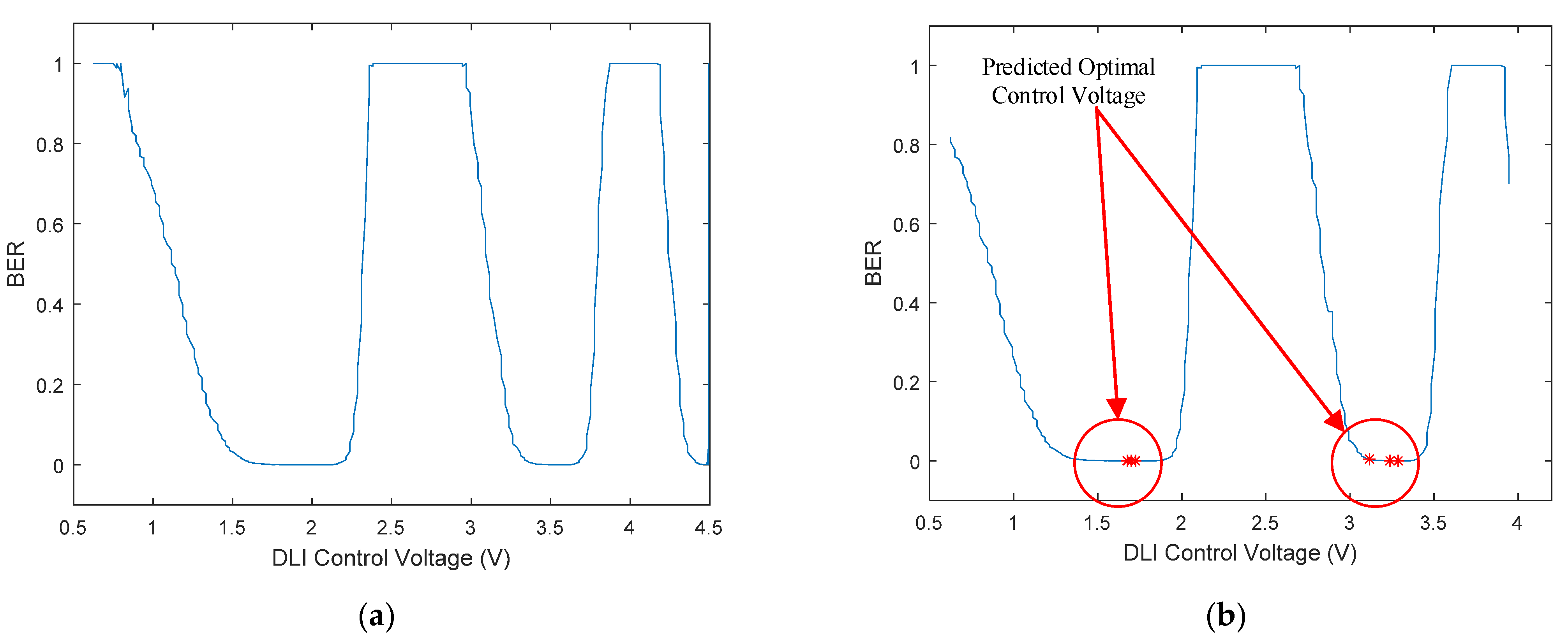
5.2. Implementations on FPGA
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gnauck, A.H.; Liu, X.; Wei, X.; Gill, D.M.; Burrows, E.C. Comparison of modulation formats for 42.7-gb/s single-channel transmission through 1980 km of SSMF. IEEE Photonics Technol. Lett. 2004, 16, 909–911. [Google Scholar] [CrossRef]
- Golovchenko, A.E.; Rahman, L.; Bakhshi, B.; Kovsh, D.; Idrovo, F.; Abbott, M. Using RZ DPSK-Based Transponders for Upgrades on Existing Long-Haul Submarine WDM Systems. J. Lightwave Technol. 2008, 26, 204–208. [Google Scholar] [CrossRef]
- Dai, Y. Optical Signal Processing of Phase-Modulated Signal for Communication. Ph.D. Thesis, The Chinese University of Hong Kong, Hong Kong, China, 2011. [Google Scholar]
- M’Sallem, Y.B.; Park, C.S.; LaRochelle, S.; Rusch, L.A. Multi-Format Wavelength Conversion Using Quantum Dash Mode-Locked Laser Pumps. Photonics 2015, 2, 527–539. [Google Scholar] [CrossRef]
- Cai, J.X.; Foursa, D.G.; Liu, L.; Davidson, C.R.; Cai, Y.; Patterson, W.W.; Lucero, A.J.; Bakhshi, B.; Mohs, G.; Corbett, P.C.; et al. RZ-DPSK Field Trial Over 13,100 km of Installed Non-Slope-Matched Submarine Fibers. J. Lightwave Technol. 2005, 23, 95–103. [Google Scholar]
- Wang, J. Performance Evaluation of DPSK Optical Fiber Communication Systems. Ph.D. Thesis, University of California, Berkeley, CA, USA, 2004. [Google Scholar]
- Zhang, S. Control of A Nonlinear Mach-Zehnder Interferometer for Optical Regeneration Using Digital Signal Processing. Ph.D. Thesis, Queen’s University, Kingston, ON, Canada, 2014. [Google Scholar]
- Lu, J. Research on High Speed Laser Communication Experiment System Based on DPSK/Self-Homodying Detection. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2018. [Google Scholar]
- Sudheer, V.R.; Seena, R.; Sankararaman, S. DPSK Based Low Cost Radio Fiber System for Communication. Opt. Quantum Electron. 2019, 51, 150. [Google Scholar] [CrossRef]
- Zhang, S.; Cartledge, C. A DSP-Based Control Method for a Nonlinear Mach–Zehnder Interferometer DPSK Regenerator. J. Lightwave Technol. 2015, 33, 3788–3795. [Google Scholar] [CrossRef]
- Xu, T.; Jacobsen, G.; Popov, S.; Li, J.; Liu, T.; Zhang, Y.; Bayvel, P. Analytical Investigations on Carrier Phase Recovery in Dispersion-Unmanaged n-PSK Coherent Optical Communication Systems. Photonics 2016, 3, 51. [Google Scholar] [CrossRef] [Green Version]
- Rodrigo Navarro, J.; Kakkar, A.; Pang, X.; Iglesias Olmedo, M.; Ozolins, O.; Da Ros, F.; Piels, M.; Schatz, R.; Zibar, D.; Jacobsen, G.; et al. Two-Stage n-PSK Partitioning Carrier Phase Recovery Scheme for Circular mQAM Coherent Optical Systems. Photonics 2016, 3, 37. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y. Research on DPSK Demodulation Technology in Coherent Optical Communication System. Master’s Thesis, Xi’an University of Technology, Xi’an, China, 2019. [Google Scholar]
- Bayvel, P.; Behrens, C.; Millar, D.S. Digital Signal Processing (DSP) and Its Application in Optical Communication Systems. In Optical Fiber Telecommunications, 6th ed.; Kaminow, I.P., Li, T., Willner, A.E., Eds.; Academic Press of Elsevier: Oxford, UK, 2013; pp. 163–219. [Google Scholar]
- Kong, M.; Li, X.; Zhang, J.; Wang, K.; Xin, X.; Zhao, F.; Yu, J. High Spectral Efficiency 400 Gb/s Transmission by Different Modulation Formats and Advanced DSP. J. Lightwave Technol. 2019, 37, 5317–5325. [Google Scholar] [CrossRef]
- Buchali, F.; Aref, V.; Dischler, R.; Chagnon, M.; Schuh, K.; Hettrich, H.; Bielik, A.; Altenhain, L.; Guntermann, M.; Schimid, R.; et al. 128 GSa/s SiGe DAC Implementation Enabling 1.52 Tb/s Single Carrier Transmission. J. Lightwave Technol. 2021, 39, 763–770. [Google Scholar] [CrossRef]
- Recommendation ITU-T G.694.1: Spectral Grids for WDM applications: DWDM Frequency Grid. 3.0 ed. Available online: http://handle.itu.int/11.1002/1000/14498-en (accessed on 19 July 2021).
- Zhou, J.; Huang, Z.; Liu, C.; Su, S. Design of Adaptive Dispersion Compensation and Demodulation System for 40 Gbps RZ-DQPSK Optical Fiber Communication Receivers. Optik 2014, 2015, 370–373. [Google Scholar] [CrossRef]
- Xu, Z.; Sun, C.; Ji, T.; Manton, J.H. Feedforward and Recurrent Neural Network-Based Transfer Learning for Nonlinear Equalization in Short-Reach Optical Links. J. Lightwave Technol. 2021, 39, 475–480. [Google Scholar] [CrossRef]
- Xu, Z.; Sun, C.; Manton, J.H.; Schieh, W. Joint Equalization of Linear and Nonlinear Impairments for PAM4 Short-Reach Direct Detection Systems. IEEE Photonics Technol. Lett. 2021, 33, 425–428. [Google Scholar] [CrossRef]
- He, Y.; Liu, J.; Wang, P.; Xiong, W.; Wu, Y.; Zhou, X.; Cheng, Y.; Gao, Y.; Li, Y.; Chen, S.; et al. Detecting Orbital Angular Momentum Modes of Vortex Beams Using Feed-Forward Neural Network. J. Lightwave Technol. 2019, 37, 5848–5855. [Google Scholar] [CrossRef]
- Liang, Y.; Jiang, J.; Chen, Y.; Zhu, R.; Lu, C.; Wang, Z. Optimized Feedforward Neural Network Training for Efficient Brillouin Frequency Shift Retrieval in Fiber. IEEE Access 2019, 7, 68034–68042. [Google Scholar] [CrossRef]
- Li, S.; Zhou, J.; Huang, Z.; Sun, X. Modulation Format Identification Based on an Improved RBF Neural Network Trained With Asynchronous Amplitude Histogram. IEEE Access 2020, 8, 59524–59532. [Google Scholar] [CrossRef]
- Shen, F.; Zhou, J.; Huang, Z.; Li, L. Going Deeper into OSNR Estimation with CNN. Photonics 2021, 8, 402. [Google Scholar] [CrossRef]
- Winzer, P.J.; Essiambre, R.J. Advanced Optical Modulation Formats. In Optical Fiber Telecommunications V B, 5th ed.; Kaminow, I.P., Li, T., Eds.; Academic Press of Elsevier: Oxford, UK, 2008; pp. 23–93. [Google Scholar]
- Conradi, J. Bandwidth-efficient modulation formats for digital fiber transmission systems. In Optical Fiber Telecommunications IV B, 4th ed.; Kaminow, I.P., Li, T., Eds.; Academic Press of Elsevier: Oxford, UK, 2002; pp. 862–901. [Google Scholar]
- Fatemeh, S. Investigation of Low-Power Integrated Optical Modulators. Ph.D. Thesis, McGill University, Montreal, QC, Canada, 2018. [Google Scholar]
- Cao, H.; Shu, X.; Atai, J.; Gbadebo, A.; Xiong, B.; Fan, T.; Tang, H.; Yang, W.; Yu, Y. Optimally-Designed Single Fiber Bragg Grating Filter Scheme for RZ-OOK/DPSK/DQPSK to NRZ-OOK/DPSK/DQPSK Format Conversion. Optics Express 2014, 22, 30442–30460. [Google Scholar] [CrossRef]
- Gnauck, A. 40-Gb/s RZ-Differential Phase Shift Keyed Transmission. In Proceedings of the OFC 2003 Optical Fiber Communications Conference, Atlanta, GA, USA, 28 March 2003; pp. 450–451. [Google Scholar]
- Zhu, X.; Yuan, L.; Liu, Z.; Yang, J.; Guan, C. Coupling Theoretical Model Between Single-Core Fiber and Twin-Core Fiber. J. Lightwave Technol. 2009, 27, 5235–5239. [Google Scholar]
- Wang, J.; Kahn, J.M. Impact of Chromatic and Polarization-Mode Dispersions on DPSK Systems Using Interferometric Demodulation and Direct Detection. J. Lightwave Technol. 2004, 22, 362–371. [Google Scholar] [CrossRef]
- Buduma, N.; Lacascio, N. Fundamentals of Deep Learning, 1st ed.; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2017; pp. 17–38. [Google Scholar]
- Ye, B.; Lei, Y. Analysis of Choosing the Number of the Hidden layers and Its Nodes Number in Block Propagation Network. J. Shangqiu Vocat. Tech. Coll. 2004, 6, 52–54. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. of Hidden Nodes | Training Time (Millisecond) | Mean Squared Error |
|---|---|---|
| 1 | 15.4 | 7.9 |
| 2 | 19.6 | 1.7 |
| 3 | 24.8 | 0.2 |
| 4 | 33.8 | 1.3 |
| 5 | 16.8 | 0.9 |
| Inputs | Targets |
|---|---|
| … | … |
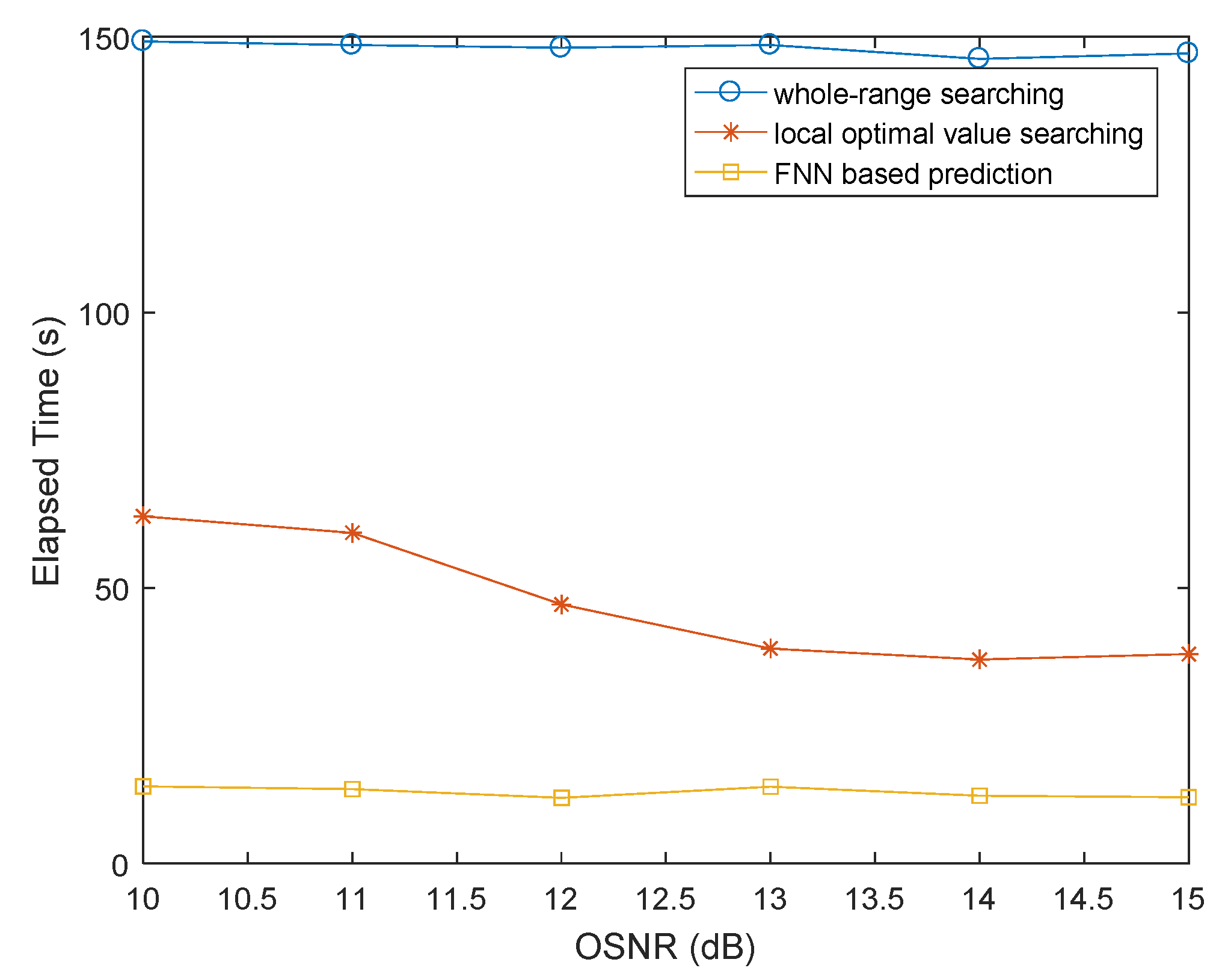
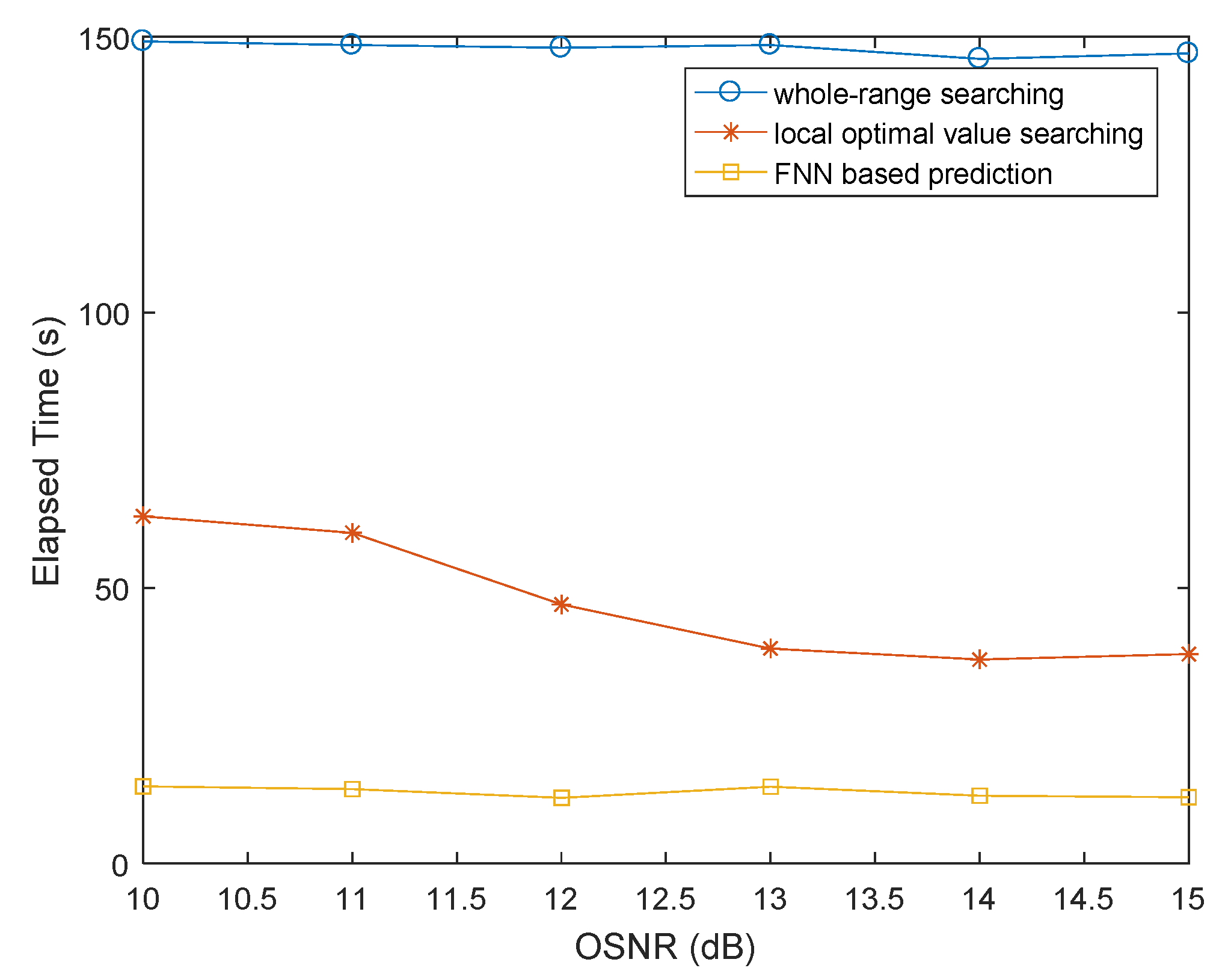
| Whole-Range Searching | Local Optimal Value Searching | FNN Based Prediction |
|---|---|---|
| 147 s | 38 s | 12 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Liang, D. Intelligent Matching of the Control Voltage of Delay Line Interferometers for Differential Phase Shift Keying-Modulated Optical Signals. Photonics 2021, 8, 428. https://doi.org/10.3390/photonics8100428
Zhou J, Liang D. Intelligent Matching of the Control Voltage of Delay Line Interferometers for Differential Phase Shift Keying-Modulated Optical Signals. Photonics. 2021; 8(10):428. https://doi.org/10.3390/photonics8100428
Chicago/Turabian StyleZhou, Jing, and Duandan Liang. 2021. "Intelligent Matching of the Control Voltage of Delay Line Interferometers for Differential Phase Shift Keying-Modulated Optical Signals" Photonics 8, no. 10: 428. https://doi.org/10.3390/photonics8100428
APA StyleZhou, J., & Liang, D. (2021). Intelligent Matching of the Control Voltage of Delay Line Interferometers for Differential Phase Shift Keying-Modulated Optical Signals. Photonics, 8(10), 428. https://doi.org/10.3390/photonics8100428