Research Progress on Vehicle Status Information Perception Based on Distributed Acoustic Sensing

 , ,
, ,
Abstract
1. Introduction
2. Classical Vehicle Perception Methods
2.1. Visual Camera Detection Technology
2.2. Lidar Detection Technology
2.3. Detection Technology Based on Fusion Perception
2.4. Other Perception Technologies
3. Vehicle Perception Method Based on DAS Technology
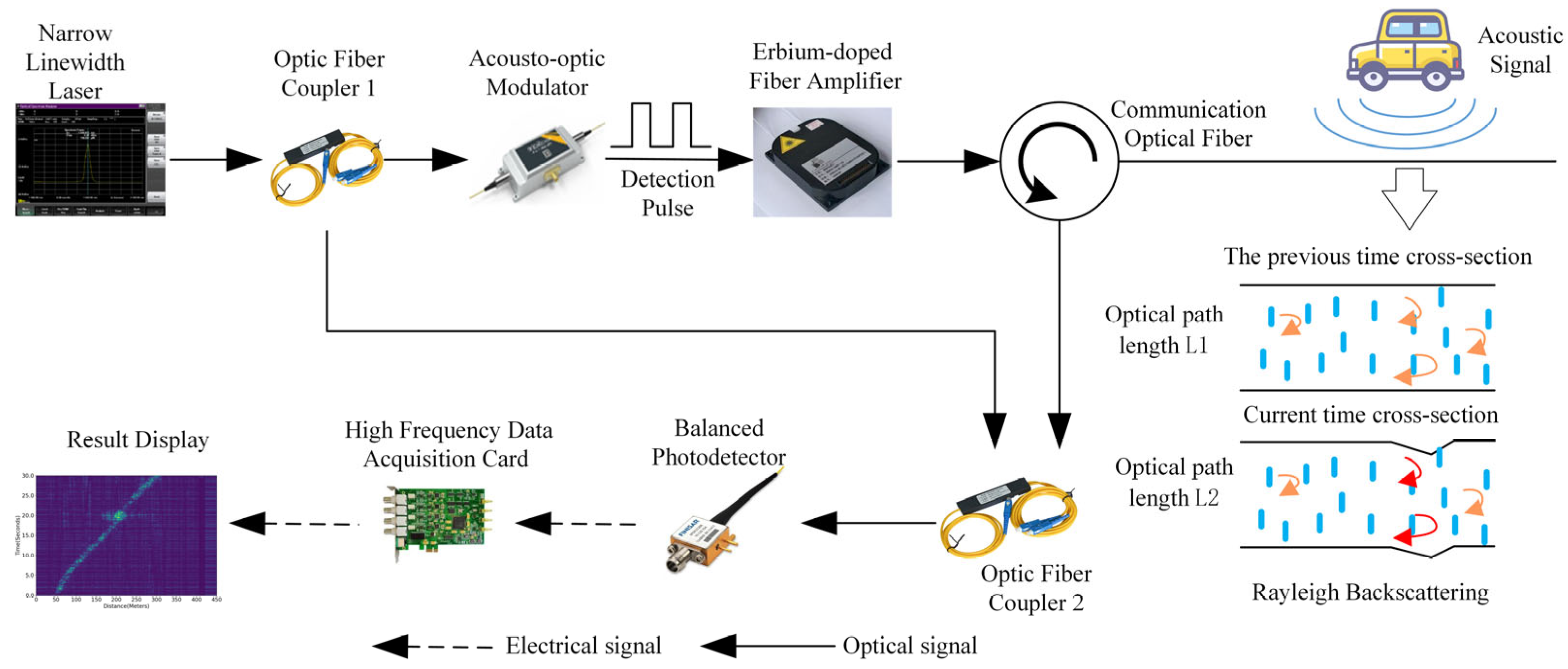
3.1. The Sensing Principle of DAS Technology
3.2. Analysis of DAS Signal Sensing Characteristics
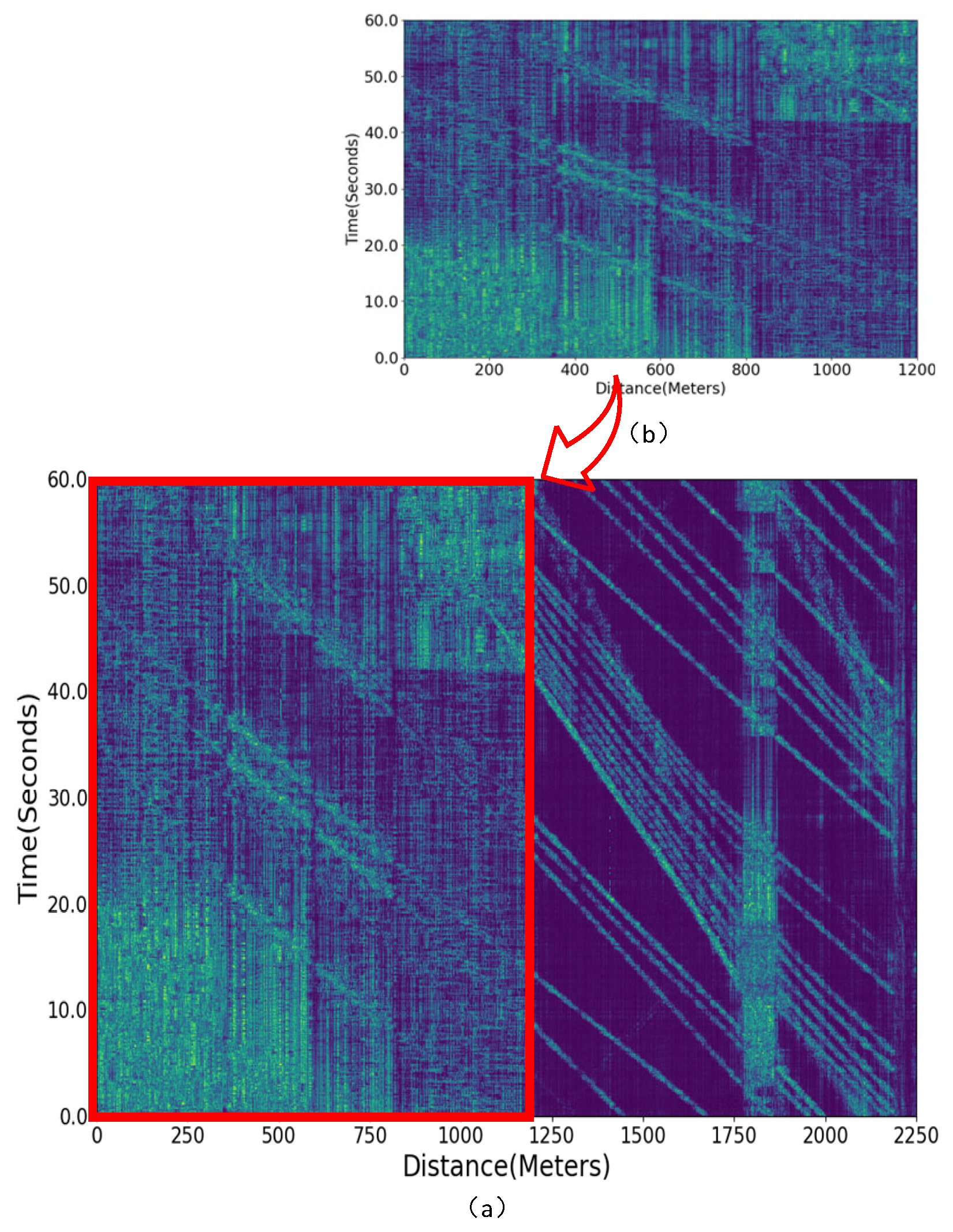
3.2.1. Correlation Between DAS Signal Sensing Characteristics and Driving Characteristics
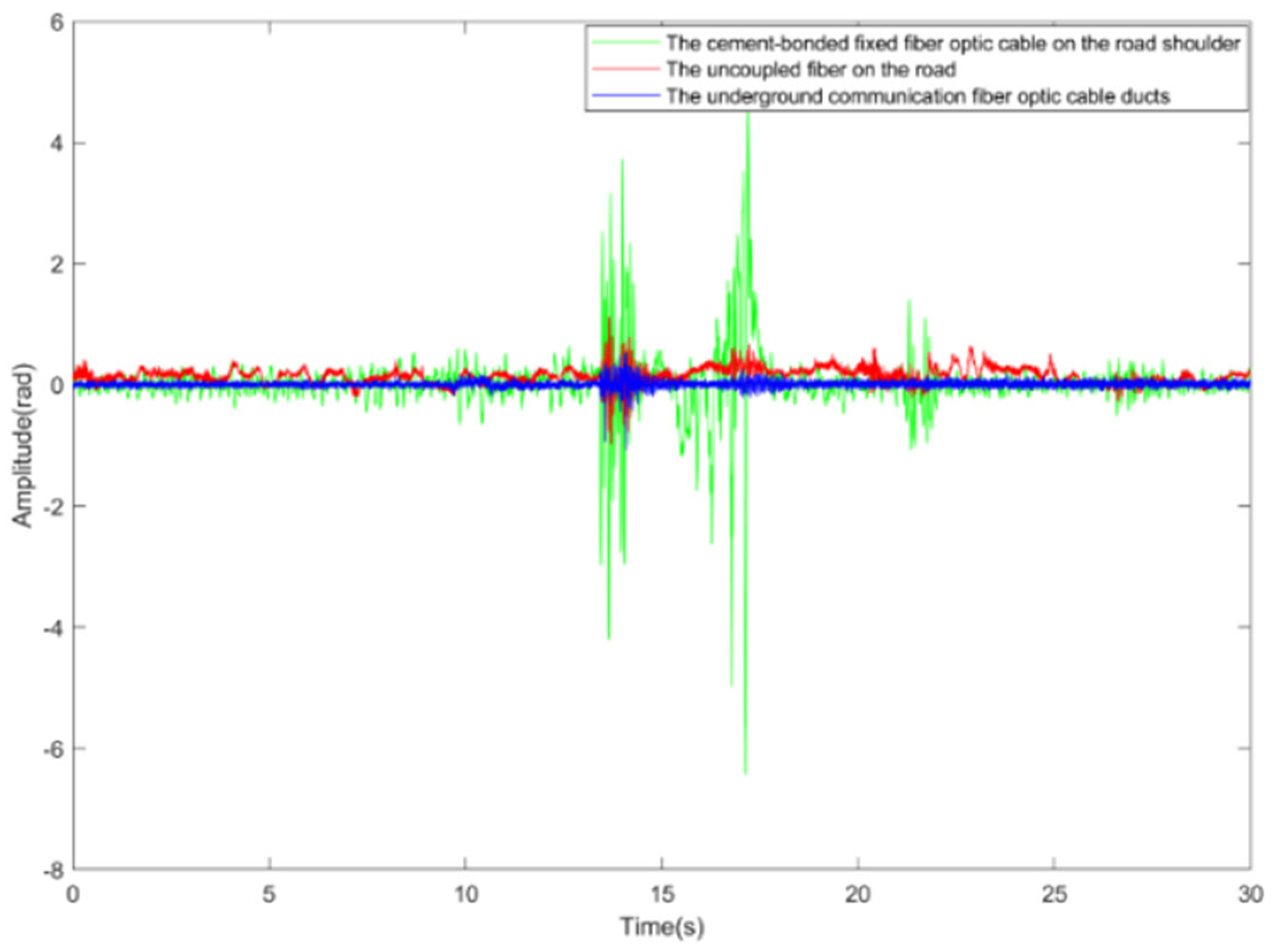
3.2.2. Correlation Between DAS Signal Sensing Characteristics and Deployment Process
3.3. Signal Processing Algorithm for DAS
3.3.1. Research on Signal Processing Algorithms Based on Traditional Methods
3.3.2. Signal Processing Algorithm Research Based on Deep Learning
4. Application of DAS Technology in Vehicle Status Information Perception
5. Summary and Forecast
5.1. Multi-Source Aliasing Detection in Complex Traffic Scenarios
5.2. Evolution Mechanism of DAS Signals in Vehicle–Road Coupling Environments
5.3. Heterogeneous Sensing Technology to Achieve Low-Cost and Reliable Sensing of the Full-Time and Spatial Domain
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| DAS | Distributed optical fiber acoustic sensing |
| DOFS | Distributed optical fiber sensing |
| CNN | Convolutional neural network |
| GAN | Generative Adversarial Network |
| SNN | Spiking Neural Network |
References
- Husain, A.A.; Maity, T.; Yadav, R.K. Vehicle detection in intelligent transport system under a hazy environment: A survey. IET Image Proc. 2020, 14, 1–10. [Google Scholar] [CrossRef]
- Zhao, J.; Xu, H.; Liu, H.; Wu, J.; Zheng, Y.; Wu, D. Detection and tracking of pedestrians and vehicles using roadside LiDAR sensors. Transp. Res. Part C Emerg. Technol. 2019, 100, 68–87. [Google Scholar] [CrossRef]
- Chen, X.; Kong, X.; Xu, M.; Sandrasegaran, K.; Zheng, J. Road Vehicle Detection and Classification Using Magnetic Field Measurement. IEEE Access 2019, 7, 52622–52633. [Google Scholar] [CrossRef]
- Zhou, S.; Xu, H.; Zhang, G.; Ma, T.; Yang, Y. Leveraging Deep Convolutional Neural Networks Pre-Trained on Autonomous Driving Data for Vehicle Detection From Roadside LiDAR Data. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22367–22377. [Google Scholar] [CrossRef]
- Guan, E.; Zhang, Z.; He, M.; Zhao, X. Evaluation of classroom teaching quality based on video processing technology. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017. [Google Scholar] [CrossRef]
- Hind, S.; Gekker, A. Automotive parasitism: Examining Mobileye’s ‘car-agnostic’ platformisation. New Media Soc. 2022, 26, 3707–3727. [Google Scholar] [CrossRef]
- Tomzcak, K.; Pelter, A.; Gutierrez, C.; Stretch, T.; Hilf, D.; Donadio, B.; Tenhundfeld, N.L.; Visser, E.J.d.; Tossell, C.C. Let Tesla Park Your Tesla: Driver Trust in a Semi-Automated Car. In Proceedings of the 2019 Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 26 April 2019; pp. 1–6, 10. [Google Scholar] [CrossRef]
- Gyujin, B.; In, C.S.; SukJu, K.; Hwan, K.Y. Dual-dissimilarity measure-based statistical video cut detection. J. Real-Time Image Process. 2019, 16, 1987–1997. [Google Scholar] [CrossRef]
- Zhang, Y.; Zheng, J.; Zhang, C.; Li, B. An effective motion object detection method using optical flow estimation under a moving camera. J. Vis. Commun. Image Represent. 2018, 55, 215–228. [Google Scholar] [CrossRef]
- Chen, Y.; Sun, Z.; Lam, K. An Effective Subsuperpixel-Based Approach for Background Subtraction. IEEE Trans. Ind. Electron. 2020, 67, 601–609. [Google Scholar] [CrossRef]
- Kim, J.; Baek, J.; Kim, E. A Novel On-Road Vehicle Detection Method Using πHOG. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3414–3429. [Google Scholar] [CrossRef]
- Carion, N.; Massa, F.; Synnaeve, G.; Usunier, N.; Kirillov, A.; Zagoruyko, S. End-to-End Object Detection with Transformers. In Proceedings of the Computer Vision—ECCV 2020, Glasgow, UK, 23–28 August 2020; pp. 213–229. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale. In Proceedings of the International Conference on Learning Representations, Vienna, Austria, 4 May 2021. [Google Scholar] [CrossRef]
- Philion, J.; Fidler, S. Lift, Splat, Shoot: Encoding Images from Arbitrary Camera Rigs by Implicitly Unprojecting to 3D. In Proceedings of the Computer Vision—ECCV 2020, Glasgow, UK, 23–28 August 2020; pp. 194–210. [Google Scholar] [CrossRef]
- Li, F.; Zhang, H.; Liu, S.; Guo, J.; Ni, L.M.; Zhang, L. DN-DETR: Accelerate DETR Training by Introducing Query DeNoising. IEEE Trans. Pattern Anal. Mach. Intell. 2024, 46, 2239–2251. [Google Scholar] [CrossRef]
- Liu, X.; Peng, H.; Zheng, N.; Yang, Y.; Hu, H.; Yuan, Y. EfficientViT: Memory Efficient Vision Transformer with Cascaded Group Attention. In Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 17–24 June 2023; pp. 14420–14430. [Google Scholar] [CrossRef]
- Li, Z.; Wang, W.; Li, H.; Xie, E.; Sima, C.; Lu, T.; Qiao, Y.; Dai, J. BEVFormer: Learning Bird’s-Eye-View Representation from Multi-camera Images via Spatiotemporal Transformers. In Proceedings of the Computer Vision—ECCV 2022, Tel Aviv, Israel, 23–27 October 2022; pp. 1–18. [Google Scholar] [CrossRef]
- Yang, C.; Chen, Y.; Tian, H.; Tao, C.; Zhu, X.; Zhang, Z. BEVFormer v2: Adapting Modern Image Backbones to Bird’s-Eye-View Recognition via Perspective Supervision. In Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 17–24 June 2023; pp. 17830–17839. [Google Scholar] [CrossRef]
- Song, H.; Liang, H.; Li, H.; Dai, Z.; Yun, X. Vision-based vehicle detection and counting system using deep learning in highway scenes. Eur. Transp. Res. Rev. 2019, 11, 51. [Google Scholar] [CrossRef]
- He, Y.; Liu, Z. A Feature Fusion Method to Improve the Driving Obstacle Detection Under Foggy Weather. IEEE Trans. Transp. Electrif. 2021, 7, 2505–2515. [Google Scholar] [CrossRef]
- Yi, K.; Luo, K.; Chen, T.; Hu, R. An Improved YOLOX Model and Domain Transfer Strategy for Nighttime Pedestrian and Vehicle Detection. Appl. Sci. 2022, 12, 12476. [Google Scholar] [CrossRef]
- Reddy, N.D.; Vo, M.; Narasimhan, S.G. Occlusion-Net: 2D/3D Occluded Keypoint Localization Using Graph Networks. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 7318–7327. [Google Scholar] [CrossRef]
- Zhang, W.; Zheng, Y.; Gao, Q.; Mi, Z. Part-Aware Region Proposal for Vehicle Detection in High Occlusion Environment. IEEE Access 2019, 7, 100383–100393. [Google Scholar] [CrossRef]
- Dong, X.; Yan, S.; Duan, C. A lightweight vehicles detection network model based on YOLOv5. Eng. Appl. Artif. Intell. 2022, 113, 104914. [Google Scholar] [CrossRef]
- Alam, M.K.; Ahmed, A.; Salih, R.; Al Asmari, A.F.S.; Khan, M.A.; Mustafa, N.; Mursaleen, M.; Islam, S. Faster RCNN based robust vehicle detection algorithm for identifying and classifying vehicles. J. Real Time Image Process. 2023, 20, 93. [Google Scholar] [CrossRef]
- Zarei, N.; Moallem, P.; Shams, M. Real-time vehicle detection using segmentation-based detection network and trajectory prediction. IET Comput. Vis. 2024, 18, 191–209. [Google Scholar] [CrossRef]
- Liu, H.; Ding, Q.; Hu, Z.; Chen, X. Remote Sensing Image Vehicle Detection Based on Pre-Training and Random-Initialized Fusion Network. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Xiong, C.; Yu, A.; Yuan, S.; Gao, X. Vehicle detection algorithm based on lightweight YOLOX. Signal Image Video Process. 2023, 17, 1793–1800. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, Y.; Wang, Z.; Jiang, Y. YOLOv7-RAR for Urban Vehicle Detection. Sensors 2023, 23, 1801. [Google Scholar] [CrossRef]
- Zhou, J.; Duan, J. Moving object detection for intelligent vehicles based on occupancy grid map. Syst. Eng. Electron. 2015, 37, 436–442. [Google Scholar] [CrossRef]
- Deng, Q.; Li, X. Vehicle detection algorithm based on multi-feature fusion. Transducer Microsyst. Technol. 2020, 39, 131–134. [Google Scholar] [CrossRef]
- Charles, R.Q.; Su, H.; Kaichun, M.; Guibas, L.J. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 77–85. [Google Scholar] [CrossRef]
- Qi, C.; Yi, L.; Su, H.; Guibas, L.J. PointNet++: Deep hierarchical feature learning on point sets in a metric space. In Proceedings of the 31st International Conference on Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; pp. 5105–5114. [Google Scholar] [CrossRef]
- Zhou, Y.; Tuzel, O. VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4490–4499. [Google Scholar] [CrossRef]
- Lang, A.H.; Vora, S.; Caesar, H.; Zhou, L.; Yang, J.; Beijbom, O. PointPillars: Fast Encoders for Object Detection From Point Clouds. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 12689–12697. [Google Scholar] [CrossRef]
- Yin, T.; Zhou, X.; Krahenbuhl, P. Center-based 3d object detection and tracking. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 11779–11788. [Google Scholar] [CrossRef]
- Shi, S.; Wang, X.; Li, H. PointRCNN: 3d object proposal generation and detection from point cloud. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 770–779. [Google Scholar] [CrossRef]
- Shi, S.; Wang, Z.; Shi, J.; Wang, X.; Li, H. From Points to Parts: 3D Object Detection From Point Cloud With Part-Aware and Part-Aggregation Network. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 2647–2664. [Google Scholar] [CrossRef]
- Xu, Q.; Zhong, Y.; Neumann, U. Behind the curtain: Learning occluded shapes for 3d object detection. In Proceedings of the AAAI Conference on Artificial Intelligence, Vancouver, BC, Canada, 22 February–1 March 2022; pp. 2893–2901. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Q.; Zhu, Z.; Hou, J.; Yuan, Y. Glenet: Boosting 3d object detectors with generative label uncertainty estimation. Int. J. Comput. Vis. 2023, 131, 3332–3352. [Google Scholar] [CrossRef]
- Chen, T. 3D LIDAR-Based Dynamic Vehicle Detection and Tracking. Master’s Thesis, Graduate School of National University of Defense Technology, Hunan, China, 2017. [Google Scholar]
- Wang, Z.; Wang, X.; Fang, B.; Yu, K.; Ma, J. Vehicle detection based on point cloud intensity and distance clustering. J. Phys. Conf. Ser. 2021, 1748, 042053. [Google Scholar] [CrossRef]
- Zhou, F.; Tao, C.; Gao, Z.; Zhang, Z.; Zheng, S.; Zhu, Y. 3-D Dynamic Multitarget Detection Algorithm Based on Cross-View Feature Fusion. IEEE Trans. Artif. Intell. 2024, 5, 3146–3159. [Google Scholar] [CrossRef]
- Ahmed, I.; Jeon, G.; Chehri, A. A Smart IoT Enabled End-to-End 3D Object Detection System for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2023, 24, 13078–13087. [Google Scholar] [CrossRef]
- Sun, H.; Fan, Z.; Song, Z.; Wang, Z.; Wu, K.; Lu, J. MonoSIM: Simulating Learning Behaviors of Heterogeneous Point Cloud Object Detectors for Monocular 3-D Object Detection. IEEE Trans. Instrum. Meas. 2024, 73, 1–14. [Google Scholar] [CrossRef]
- Xu, A.; Nie, J.; He, Z.; Lv, X. TM2B: Transformer-Based Motion-to-Box Network for 3D Single Object Tracking on Point Clouds. IEEE Rob. Autom. Lett. 2024, 9, 7078–7085. [Google Scholar] [CrossRef]
- Chen, R.; Zhang, D.; Liu, Q.; Li, J. Robust 3D Object Detection Based on Point Feature Enhancement in Driving Scenes. In Proceedings of the 2024 IEEE Intelligent Vehicles Symposium (IV), Jeju Island, Republic of Korea, 2–5 June 2024; pp. 2791–2798. [Google Scholar] [CrossRef]
- Khoche, A.; Sánchez, L.P.; Batool, N.; Mansouri, S.S.; Jensfelt, P. Towards Long-Range 3D Object Detection for Autonomous Vehicles. In Proceedings of the 2024 IEEE Intelligent Vehicles Symposium (IV), Jeju Island, Republic of Korea, 2–5 June 2024; pp. 2206–2212. [Google Scholar] [CrossRef]
- An, P.; Duan, Y.; Huang, Y.; Ma, J.; Chen, Y.; Wang, L.; Yang, Y.; Liu, Q. SP-Det: Leveraging Saliency Prediction for Voxel-Based 3D Object Detection in Sparse Point Cloud. IEEE Trans. Multimed. 2024, 26, 2795–2808. [Google Scholar] [CrossRef]
- Du, L.; Ye, X.; Tan, X.; Johns, E.; Chen, B.; Ding, E.; Xue, X.; Feng, J. AGO-Net: Association-Guided 3D Point Cloud Object Detection Network. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 44, 8097–8109. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Jia, K. Frustum convnet: Sliding frustums to aggregate local point-wise features for amodal 3d object detection. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 1742–1749. [Google Scholar] [CrossRef]
- Cai, Q.; Pan, Y.; Yao, T.; Mei, T. 3D Cascade RCNN: High Quality Object Detection in Point Clouds. IEEE Trans. Image Process. 2022, 31, 5706–5719. [Google Scholar] [CrossRef] [PubMed]
- Xie, G.; Chen, Z.; Gao, M.; Hu, M.; Qin, X. PPF-Det: Point-Pixel Fusion for Multi-Modal 3D Object Detection. IEEE Trans. Intell. Transp. Syst. 2024, 25, 5598–5611. [Google Scholar] [CrossRef]
- Kim, Y.; Park, K.; Kim, M.; Kum, D.; Choi, J.W. 3D dual-fusion: Dual-domain dual-query camera-LIDAR fusion for 3D object detection. arXiv 2022, arXiv:2211.13529. [Google Scholar] [CrossRef]
- Qiu, Y.; Li, F. Research on Vehicle and Pedestrian Detection Technology Based on Multimodal Image. Semicond. Optoelectron. 2023, 44, 775–781. [Google Scholar] [CrossRef]
- Zhao, K.; Ma, L.; Meng, Y.; Liu, L.; Wang, J.; Junior, J.M.; Gonçalves, W.N.; Li, J. 3D Vehicle Detection Using Multi-Level Fusion From Point Clouds and Images. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15146–15154. [Google Scholar] [CrossRef]
- Li, Y.; Park, J.; O’Toole, M.; Kitani, K. Modality-Agnostic Learning for Radar-Lidar Fusion in Vehicle Detection. In Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 908–917. [Google Scholar] [CrossRef]
- Zhang, Z.; Shen, Y.; Li, H.; Zhao, X.; Yang, M.; Tan, W.; Pu, S.; Mao, H. MAFF-Net: Filter False Positive for 3D Vehicle Detection with Multi-modal Adaptive Feature Fusion. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 369–376. [Google Scholar] [CrossRef]
- Roy, D.; Li, Y.; Jian, T.; Tian, P.; Chowdhury, K.; Ioannidis, S. Multi-Modality Sensing and Data Fusion for Multi-Vehicle Detection. IEEE Trans. Multimed. 2023, 25, 2280–2295. [Google Scholar] [CrossRef]
- Wu, Y.; Guan, X.; Zhao, B.; Ni, L.; Huang, M. Vehicle Detection Based on Adaptive Multimodal Feature Fusion and Cross-Modal Vehicle Index Using RGB-T Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 8166–8177. [Google Scholar] [CrossRef]
- Wang, S.; Caesar, H.; Nan, L.; Kooij, J.F.P. UniBEV: Multi-modal 3D Object Detection with Uniform BEV Encoders for Robustness against Missing Sensor Modalities. In Proceedings of the 2024 IEEE Intelligent Vehicles Symposium (IV), Jeju Island, Republic of Korea, 2–5 June 2024; pp. 2776–2783. [Google Scholar] [CrossRef]
- Cao, H.; Chen, G.; Xia, J.; Zhuang, G.; Knoll, A. Fusion-Based Feature Attention Gate Component for Vehicle Detection Based on Event Camera. IEEE Sens. J. 2021, 21, 24540–24548. [Google Scholar] [CrossRef]
- El-Dalahmeh, A.; El-Dalahmeh, M.; Li, J. Enhanced Vehicle Detection through Multi-Sensor Fusion Utilizing YOLO-NAS and Faster R-CNN. In Proceedings of the 2024 International Joint Conference on Neural Networks (IJCNN), Yokohama, Japan, 30 June–5 July 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Wu, X.; Wang, L.; Xu, L.; Fei, A. Remote Sensing lmage Dense Target Detection Based onMultimodal Interactive-guided Network. J. Command Control 2024, 10, 1–8. [Google Scholar] [CrossRef]
- Lian, Y.; Li, G.; Shen, S. Vehicle detection method based on remote sensing image fusion of superpixel and multi-modal sensing network. Opt. Precis. Eng. 2023, 31, 905–919. [Google Scholar] [CrossRef]
- Stocker, M.; Rönkkö, M.; Kolehmainen, M. Situational Knowledge Representation for Traffic Observed by a Pavement Vibration Sensor Network. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1441–1450. [Google Scholar] [CrossRef]
- Zhao, Q.; Ruan, D.; Hu, M.; Chen, X.; Wang, L. Dynamic Response Analysis of Multi-sensor Embedded Pavement Structure Under Different Loading Conditions. J. Beijing Univ. Technol. 2024, 50, 431–442. [Google Scholar] [CrossRef]
- Yang, L.; Liu, S.; Zhao, Y. Deep-Learning Based Algorithm for Detecting Targets in Infrared Images. Appl. Sci. 2022, 12, 3322. [Google Scholar] [CrossRef]
- Li, G.; Li, S.E.; Zou, R.; Liao, Y.; Cheng, B. Detection of road traffic participants using cost-effective arrayed ultrasonic sensors in low-speed traffic situations. Mech. Syst. Signal Process. 2019, 132, 535–545. [Google Scholar] [CrossRef]
- Zhang, X. Distributed Optical Fiber Sensing Technology; Science Press: Beijing, China, 2013. [Google Scholar]
- Zhang, X.; Zhang, Y.; Wang, L.; Yu, K.; Liu, B.; Yin, G.; Liu, K.; Li, X.; Li, S.; Ding, C.; et al. Current Status and Future of Research and Applications for Distributed Fiber Optic Sensing Technology. Acta Opt. Sin. 2024, 44, 0106001. [Google Scholar] [CrossRef]
- Boyd, R.W.; Masters, B.R. Nonlinear Optics, Third Edition; Academic Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Editorial Department of China Journal of Highway and Transport. Review on China’s Automotive Engineering Research Progress: 2023. China J. Highw. Transp. 2023, 36, 1–192. [Google Scholar] [CrossRef]
- Wu, H.; Xing, P.; Zhou, J. Theoretical Study and Test Validation on Vehicle Rearview Mirror Whistling Based on γ Corrected Transition Model. Automot. Eng. 2021, 43, 885–890+933. [Google Scholar] [CrossRef]
- Xu, L. The Acquisition of Highway Environmental Information By Using DAS Big-Data Analysis Method. Master’s Thesis, Donghua University, Shanghai, China, 2023. [Google Scholar]
- Thomas, P.; Heggelund, Y.; Klepsvik, I.; Cook, J.; Kolltveit, E.; Vaa, T. The Performance of Distributed Acoustic Sensing for Tracking the Movement of Road Vehicles. IEEE Trans. Intell. Transp. Syst. 2024, 25, 4933–4946. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, P.; Ding, K.; Li, H.; Zhang, J.; Liu, X.; Bai, Q.; Wang, D.; Jin, B. Pattern Recognition Using Relevant Vector Machine in Optical Fiber Vibration Sensing System. IEEE Access 2019, 7, 5886–5895. [Google Scholar] [CrossRef]
- Jiang, F.; Li, H.; Zhang, Z.; Zhang, X. An event recognition method for fiber distributed acoustic sensing systems based on the combination of MFCC and CNN. Proc. SPIE 2018, 6, 10618. [Google Scholar] [CrossRef]
- Wang, Z.; Lou, S.; Liang, S.; Sheng, X. Multi-Class Disturbance Events Recognition Based on EMD and XGBoost in φ-OTDR. IEEE Access 2020, 8, 63551–63558. [Google Scholar] [CrossRef]
- Muñoz, F.; Soto, M.A. Enhancing fibre-optic distributed acoustic sensing capabilities with blind near-field array signal processing. Nat. Commun. 2022, 13, 4019. [Google Scholar] [CrossRef] [PubMed]
- Shang, Y.; Wang, C.; Ni, J.; Zhao, W.; Li, C.; Cao, B.; Huang, S.; Wang, C.; Peng, G. Discussion on the sensitivity of optical cables based on distributed acoustic sensing. Opt. Rev. 2019, 26, 659–663. [Google Scholar] [CrossRef]
- Lin, R.; Bao, F.; Xie, J.; Zhang, G.; Song, Z.; Zeng, X. The influence of cable installment on DAS active and passive source records. Chin. J. Geophys. 2022, 65, 4087–4098. [Google Scholar] [CrossRef]
- Song, Z.; Zeng, X.; Wang, B.; Yang, J.; Li, X.; Wang, F. Distributed Acoustic Sensing Using a Large-Volume Airgun Source and Internet Fiber in an Urban Area. Seismol. Res. Lett. 2021, 92, 1950–1960. [Google Scholar] [CrossRef]
- Bence, P.; Daniela, D.; James, E.M.; Arthur, H.H. A study of the geophysical response of distributed fibre optic acoustic sensors through laboratory-scale experiments. Geophys. Prospect. 2017, 65, 1186–1204. [Google Scholar] [CrossRef]
- Li, Y.; Li, F.; Jianguo, L.; Qihu, J.; Liu, C.; Wu, J. Application of distributed acoustic sensing in borehole seismic exploration. Geophys. Prospect. Pet. 2020, 59, 242–249. [Google Scholar] [CrossRef]
- An, Y.; Ma, J.; Xu, T.; Cai, Y.; Liu, H.; Sun, Y.; Yan, W. Traffic Vibration Signal Analysis of DAS Fiber Optic Cables with Different Coupling Based on an Improved Wavelet Thresholding Method. Sensors 2023, 23, 5727. [Google Scholar] [CrossRef]
- Hall, A.J.; Minto, C.D. Using Fibre Optic Cables To Deliver Intelligent Traffic Management In Smart Cities. In Proceedings of the International Conference on Smart Infrastructure and Construction 2019 (ICSIC), Churchill College, Cambridge, UK, 8–10 July 2019; pp. 125–131. [Google Scholar] [CrossRef]
- Zeng, M.; Zhao, H.; Bian, Z.; Li, C.; Wu, D. Sensing and Analysis of Concrete Pavement Vibration Field Based on Distributed Optical Fiber. China J. Highw. Transp. 2022, 35, 78–90. [Google Scholar] [CrossRef]
- Wang, C.; Liu, Q.; Chen, D.; Li, H.; Liang, W.; He, Z. Monitoring Pipeline Leakage Using Fiber-Optic Distributed Acoustic Sensor. Acta Opt. Sin. 2019, 39, 119–125. [Google Scholar] [CrossRef]
- Liang, K.; Wang, C. Roller Fault Monitoring of Belt Conveyor Using Distributed Fiber-Optic Acoustic Sensor. Laser Optoelectron. Prog. 2023, 60, 276–284. [Google Scholar] [CrossRef]
- Wang, M.; Li, Z.; Zhang, J.; Zhong, Y. Vehicle Trajectory Extraction Method Using Distributed Optical Acoustic Sensing. Adv. Eng. Sci. 2021, 53, 141–150. [Google Scholar] [CrossRef]
- Liu, H.; Ma, J.; Yan, W.; Liu, W.; Zhang, X.; Li, C. Traffic Flow Detection Using Distributed Fiber Optic Acoustic Sensing. IEEE Access 2018, 6, 68968–68980. [Google Scholar] [CrossRef]
- Zhao, S.; Cui, J.; Wu, Z.; Tan, J. Accuracy improvement in OFDR-based distributed sensing system by image processing. Opt. Lasers Eng. 2020, 124, 105824. [Google Scholar] [CrossRef]
- Soto, M.A.; Ramírez, J.A.; Thévenaz, L. Intensifying the response of distributed optical fibre sensors using 2D and 3D image restoration. Nat. Commun. 2016, 7, 10870. [Google Scholar] [CrossRef]
- He, H.; Shao, L.; Li, H.; Pan, W.; Luo, B.; Zou, X.; Yan, L. SNR Enhancement in Phase-Sensitive OTDR with Adaptive 2-D Bilateral Filtering Algorithm. IEEE Photonics J. 2017, 9, 1–10. [Google Scholar] [CrossRef]
- Wang, Y.; Jin, B.; Wang, Y.; Wang, D.; Liu, X.; Bai, Q. Real-Time Distributed Vibration Monitoring System Using φ-OTDR. IEEE Sens. J. 2017, 17, 1333–1341. [Google Scholar] [CrossRef]
- Sun, Q.; Feng, H.; Yan, X.; Zeng, Z. Recognition of a Phase-Sensitivity OTDR Sensing System Based on Morphologic Feature Extraction. Sensors 2015, 15, 15179–15197. [Google Scholar] [CrossRef]
- Xu, B. Study of Data Processing and Pattern Recognition for Fiber-optic Distributed Sensor System. Master’s Thesis, Wuhan Research Institute of Posts and Telecommunications, Wuhan, China, 2021. [Google Scholar]
- Fontana, M.; García-Fernández, Á.F.; Maskell, S. A Vehicle Detector Based on Notched Power for Distributed Acoustic Sensing. In Proceedings of the 2022 25th International Conference on Information Fusion (FUSION), Linköping, Sweden, 5–8 July 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Wu, H.; Wang, X.; Liao, H.; Jiao, X.; Liu, Y.; Shu, X.; Wang, J.; Rao, Y. Signal Processing in Smart Fiber-Optic Distributed Acoustic Sensor. Acta Opt. Sin. 2024, 44, 0106009. [Google Scholar] [CrossRef]
- Al Ashwal, N.H.; Al Soufy, K.A.M.; Hamza, M.E.; Swillam, M.A. Deep Learning for Optical Sensor Applications: A Review. Sensors 2023, 23, 6486. [Google Scholar] [CrossRef] [PubMed]
- Zhu, C.; Yang, K.; Yang, Q.; Pu, Y.; Chen, C. A comprehensive bibliometric analysis of signal processing and pattern recognition based on distributed optical fiber. Measurement 2023, 206, 112340. [Google Scholar] [CrossRef]
- Kandamali, D.; Cao, X.; Tian, M.; Jin, Z.; Dong, H.; Yu, K. Machine learning methods for identification and classification of events in ϕ-OTDR systems: A review. Appl. Opt. 2022, 61, 2975–2997. [Google Scholar] [CrossRef] [PubMed]
- Huang, S.; Chai, Q.; Jia, M.; Tian, Y.; Lewis, E.; Zhang, J. A recognition method of less databases by using decoupling parallel CNN based on multiple feature with DAS. Meas. Sci. Technol. 2023, 34, 115118. [Google Scholar] [CrossRef]
- Wu, H.; Zhou, B.; Zhu, K.; Shang, C.; Tam, H.Y.; Lu, C. Pattern recognition in distributed fiber-optic acoustic sensor using an intensity and phase stacked convolutional neural network with data augmentation. Opt. Express 2021, 29, 3269–3283. [Google Scholar] [CrossRef]
- Wang, S.; Liu, F.; Liu, B. Research on application of deep convolutional network in high-speed railway track inspection based on distributed fiber acoustic sensing. Opt. Commun. 2021, 492, 126981. [Google Scholar] [CrossRef]
- Xiao, X.; Ma, X.; Hui, Y.; Yin, Z.; Luan, T.H.; Wu, Y. Intrusion Detection for High-speed Railway System: A Faster R-CNN Approach. In Proceedings of the 2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall), Norman, OK, USA, 27–30 September 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Liu, X.; Wu, H.; Wang, Y.; Tu, Y.; Sun, Y.; Liu, L.; Song, Y.; Wu, Y.; Yan, G. A Fast Accurate Attention-Enhanced ResNet Model for Fiber-Optic Distributed Acoustic Sensor (DAS) Signal Recognition in Complicated Urban Environments. Photonics 2022, 9, 677. [Google Scholar] [CrossRef]
- Wu, H.; Yang, S.; Liu, X.; Xu, C.; Lu, H.; Wang, C.; Qin, K.; Wang, Z.; Rao, Y.; Olaribigbe, A.O. Simultaneous Extraction of Multi-Scale Structural Features and the Sequential Information With an End-To-End mCNN-HMM Combined Model for Fiber Distributed Acoustic Sensor. J. Light. Technol. 2021, 39, 6606–6616. [Google Scholar] [CrossRef]
- Jiang, H.; Zeng, Q.; Li, J. msCNN-LSTM perimeter intrusion vibration signal identification method based on ultra-weak FBG arrays. Opt. Fiber Technol. 2023, 81, 103564. [Google Scholar] [CrossRef]
- Yang, N.; Zhao, Y.; Wang, F.; Chen, J. Using Phase-Sensitive Optical Time Domain Reflectometers to Develop an Alignment-Free End-to-End Multitarget Recognition Model. Electronics 2023, 12, 1617. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, J.; Wang, M.; Zhong, Y.; Peng, F. Fiber distributed acoustic sensing using convolutional long short-term memory network: A field test on high-speed railway intrusion detection. Opt Express 2020, 28, 2925–2938. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Wang, C.; Zhang, F.; Jiang, S.; Sun, Z.; Zhang, H.; Duan, Z.; Liu, Z. Feature fusion-based fiber-optic distributed acoustic sensing signal identification method. Meas. Sci. Technol. 2023, 34, 125141. [Google Scholar] [CrossRef]
- Xie, D.; Wu, X.; Guo, Z.; Hong, H.; Wang, B.; Rong, Y. Intelligent Traffic Monitoring with Distributed Acoustic Sensing. Seismol. Res. Lett. 2025. [Google Scholar] [CrossRef]
- He, J.; Hu, X.; Zhang, D.; Kong, Y.; Cheng, J.; Xiao, W. Semi-supervised learning for optical fiber sensor road intrusion signal detection. Appl. Opt. 2022, 61, C65–C72. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, H.; Li, Y. Long-Distance Pipeline Safety Early Warning: A Distributed Optical Fiber Sensing Semi-Supervised Learning Method. IEEE Sens. J. 2021, 21, 19453–19461. [Google Scholar] [CrossRef]
- Wang, S.; Liu, F.; Liu, B. Semi-Supervised Deep Learning in High-Speed Railway Track Detection Based on Distributed Fiber Acoustic Sensing. Sensors 2022, 22, 413. [Google Scholar] [CrossRef] [PubMed]
- Xie, Y.; Wang, M.; Zhong, Y.; Deng, L.; Zhang, J. Label-Free Anomaly Detection Using Distributed Optical Fiber Acoustic Sensing. Sensors 2023, 23, 4094. [Google Scholar] [CrossRef]
- Wu, H.; Gan, D.; Xu, C.; Liu, Y.; Liu, X.; Song, Y.; Rao, Y. Improved Generalization in Signal Identification With Unsupervised Spiking Neuron Networks for Fiber-Optic Distributed Acoustic Sensor. J. Light. Technol. 2022, 40, 3072–3083. [Google Scholar] [CrossRef]
- Martijn, V.; Itzhak, L.; Ampuero, J.; Anthony, S.; André, F.; Cédric, R. A Self-Supervised Deep Learning Approach for Blind Denoising and Waveform Coherence Enhancement in Distributed Acoustic Sensing Data. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 3371–3384. [Google Scholar] [CrossRef]
- van den Ende, M.; Ferrari, A.; Sladen, A.; Richard, C. Deep Deconvolution for Traffic Analysis With Distributed Acoustic Sensing Data. IEEE Trans. Intell. Transp. Syst. 2023, 24, 2947–2962. [Google Scholar] [CrossRef]
- An, Y.; Gao, Y.; Wu, N.; Zhu, J.; Li, H.; Yang, J. Optimal scheduling of electric vehicle charging operations considering real-time traffic condition and travel distance. Expert Syst. Appl. 2023, 213, 118941. [Google Scholar] [CrossRef]
- Liu, H. Research on Traffic State Identification and Anti-collision Warning Based on DAS Technology. Ph.D. Dissertation, Beijing Jiaotong University, Beijing, China, 2021. [Google Scholar]
- LUNA OptaSense. Traffic Monitoring Using Fiber Optic Sensing. Available online: https://www.westernstatesforum.org/Documents/2022/PresentationsWeb/NDOT_MacGillBickett_FinalBopt_OptaSense_Web1.pdf (accessed on 11 December 2024).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research | Methods | mAP | Dataset |
|---|---|---|---|
| [19] | Divide first and then detect (YOLOv3) | 87.88% | Self-constructed vehicle dataset |
| [20] | Feature fusion training | 88.00% | KITTI |
| 82.20% | Self-constructed vehicle dataset | ||
| [21] | Multi-scale feature fusion and CIoU Loss combined with Varifocal Loss | 79.60% | BDD100K |
| [22] | Vehicle critical point detection | / | Self-constructed vehicle dataset |
| [23] | Region proposal network | 89.01% | KITTI |
| [24] | C3Ghost and Ghost modules are introduced into the YOLOv5 neck network | 72.40% | MS COCO |
| [25] | Modified Vgg16, modified MobileNetV3, and soft-NMS algorithm | 91.78% | Self-constructed vehicle dataset |
| [26] | DS_YOLO uses semantic attention in its SAMG block | 93.93% | UA_DETRAC |
| [27] | Pre-training and randomly initialized fusion network | / | Munich Vehicle Dataset |
| [28] | Lightweight YOLOX | 99.2% | BIT-Vehicle |
| [29] | YOLOv7-RAR | 95.1% | UA-DETRAC |
| Research | Methods | mAP | Dataset |
|---|---|---|---|
| [41] | Likelihood field model | Dynamic vehicle: 72.40% | KITTI |
| [42] | Random forest classifier | Vehicle: 89.30% | DJI Livox Mid-40 |
| [43] | 3D dynamic multitarget detection algorithm based on cross-view feature fusion | Vehicle: 85.20% (L1) 78.60% (L2) | Waymo |
| Vehicle: 80.79% | nuScenes | ||
| [44] | Modified YOLOv3 for 3D object detection | 97.00% | Lyft |
| [45] | RoI-level simulation module | / | Waymo |
| / | KITTI | ||
| [46] | Transformer-based motion-to-box network | Vehicle: 82.60% | KITTI |
| Vehicle: 69.5% (mean) | Waymo | ||
| Vehicle: 69.17% | nuScenes | ||
| [47] | Based on semantic and positional feature enhancement | 79.47% | nuScenes |
| Vehicle: 89.82% (easy) 88.09% (moderate) 86.75% (hard) | KITTI | ||
| [48] | Use range experts and multimodal virtual points to realize long-range 3D object detection | Vehicle: 78.50% (Range: 0–200 m) | Argoverse2 |
| [49] | Saliency prediction based 3D object detector SP-Det | Vehicle: 64.08% | STF |
| [50] | Associates intact features for objects via domain adaptation | Vehicle: 80.70% | nuScenes |
| Research | Methods | mAP | Dataset |
|---|---|---|---|
| [55] | MS-PIIFD + Multi-model YOLOv5 | MAP0.5: 95.6% MAP0.5:0.95: 74.3% | Self-constructed vehicle dataset |
| [56] | Multi-level fusion network | APBEV: Easy: 91.29%, Moderate: 89.53%, Hard: 88.06% | KITTI |
| [57] | ST-MVDNet | (IoU = 0.5) Clear: 94.7% Foggy Lidar: 91.8% | Oxford Radar Robotcar dataset |
| [58] | MAFF-Net | APBEV: Easy: 90.47%, Moderate: 87.47%, Hard: 82.69% | KITTI |
| [59] | Aggregated fusion framework | ESCAPE: 99.9% | ESCAPE+NuScene |
| NuScene: 66% | |||
| [60] | AFFCM | 76.64% | Drone vehicle |
| [61] | UniBEV | 52.5% | nuScenes |
| [62] | FAGC | 81.6% | DDD17 |
| [63] | YOLO-NAS + Faster R-CNN | 80.1% | Self-constructed vehicle dataset |
| [64] | Multimodal interactive guidance network | Postdam: 93.24% SAI-LCS: 93.05% | Postdam+ SAI-LCS dataset |
| [65] | Superpixel segmentation multimodal edge-aware network | Potsdam: 92.39% Vaihingen: 89.66% | Potsdam+ Vaihingen |
| Cement-Bonded Fixed Fiber Optic Cable on the Road Shoulder | Uncoupled Fiber on the Road | Underground Communication Fiber Optic Cable Ducts | |
|---|---|---|---|
| RMS | 71.0034 | 14.3719 | 31.5281 |
| ENERGY | 947.37 | 139.50 | 94.92 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, W.; Cheng, X.; Zhou, J.; Liu, W.; Gao, J.; Hu, C.; Zhao, X. Research Progress on Vehicle Status Information Perception Based on Distributed Acoustic Sensing. Photonics 2025, 12, 560. https://doi.org/10.3390/photonics12060560
Dong W, Cheng X, Zhou J, Liu W, Gao J, Hu C, Zhao X. Research Progress on Vehicle Status Information Perception Based on Distributed Acoustic Sensing. Photonics. 2025; 12(6):560. https://doi.org/10.3390/photonics12060560
Chicago/Turabian StyleDong, Wenqiang, Xin Cheng, Jingmei Zhou, Wei Liu, Jianjin Gao, Chuan Hu, and Xiangmo Zhao. 2025. "Research Progress on Vehicle Status Information Perception Based on Distributed Acoustic Sensing" Photonics 12, no. 6: 560. https://doi.org/10.3390/photonics12060560
APA StyleDong, W., Cheng, X., Zhou, J., Liu, W., Gao, J., Hu, C., & Zhao, X. (2025). Research Progress on Vehicle Status Information Perception Based on Distributed Acoustic Sensing. Photonics, 12(6), 560. https://doi.org/10.3390/photonics12060560