Adaptive Construction of Freeform Surface to Integrable Ray Mapping Using Implicit Fixed-Point Iteration


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Freeform Construction Method via Implicit Fixed-Point Iteration
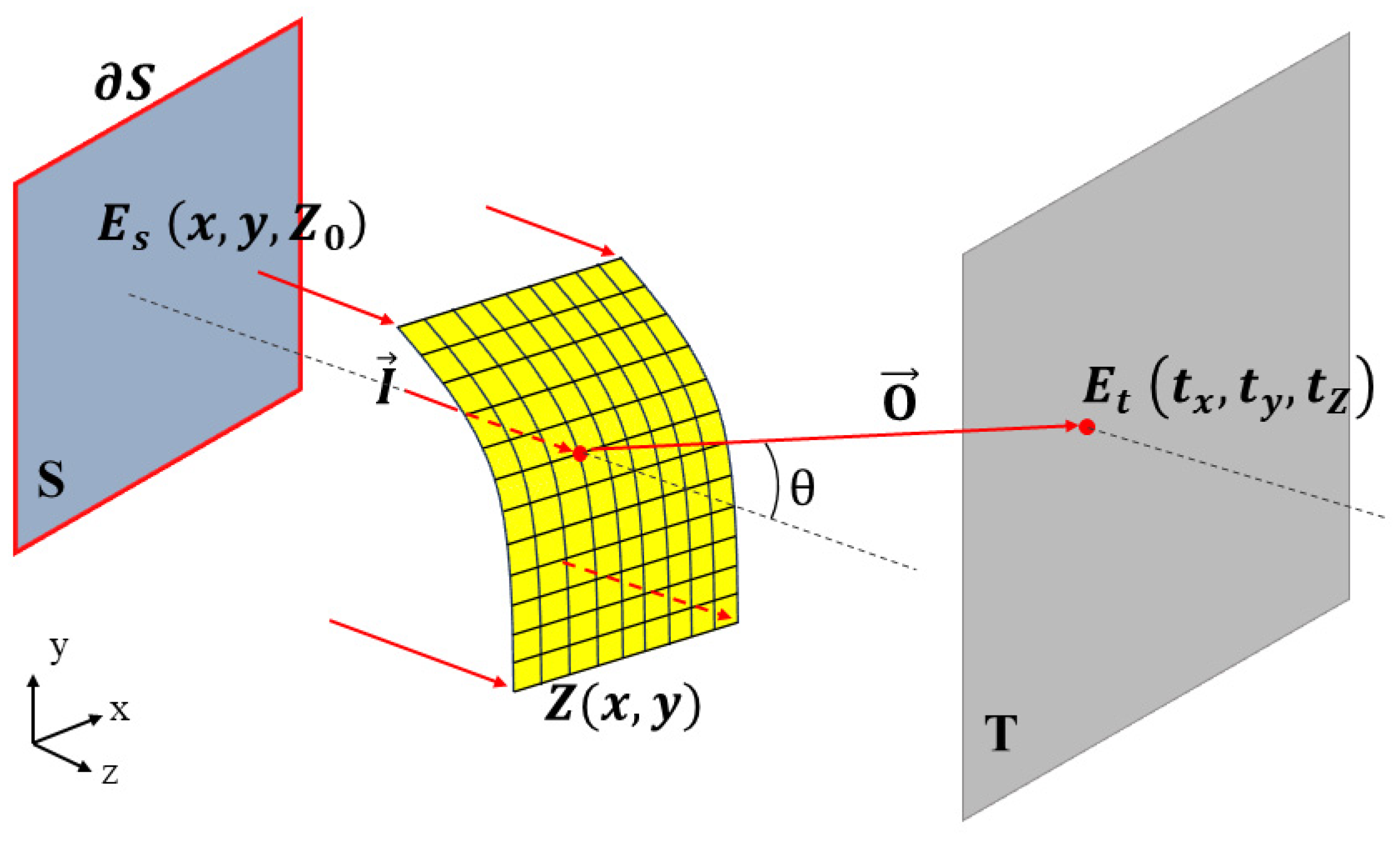
2.1. Formulation of Source-to-Target Map
2.2. Balanced Gradient Equations for Freeform Surfaces
2.3. Existence of Solution for BGE via FPI Convergence Theorem
- (I)
- When , then ;
- (II)
- There is a positive number , and , which satisfies .
- (I)
- When ;
- (II)
- .
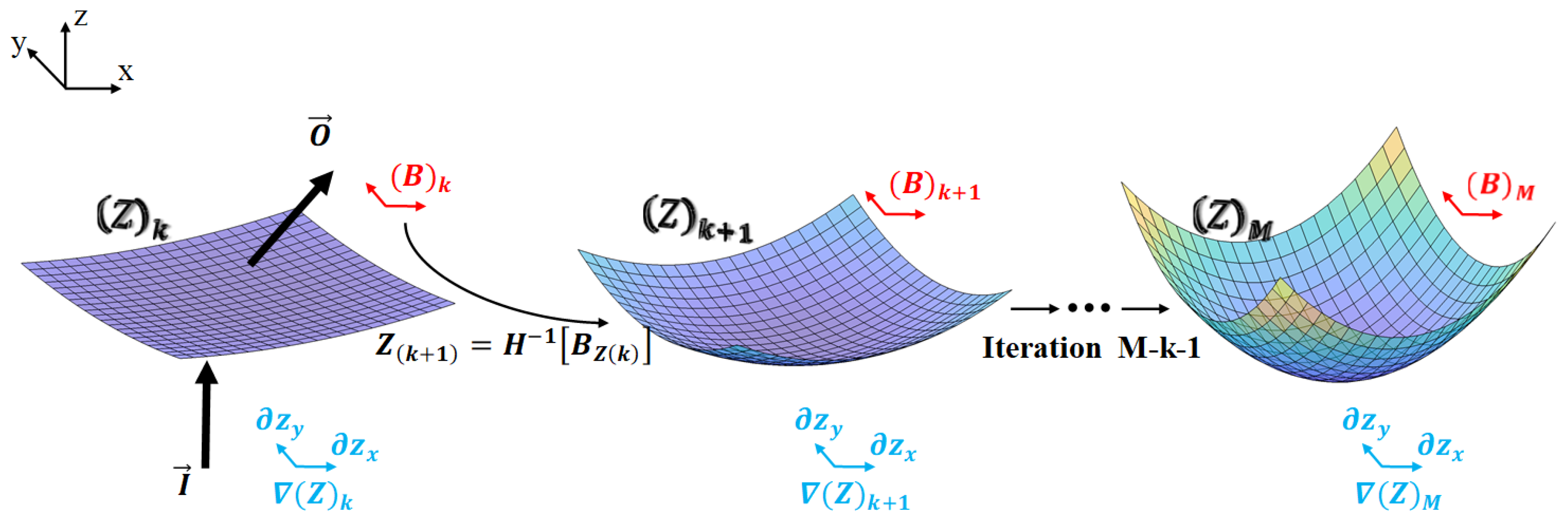
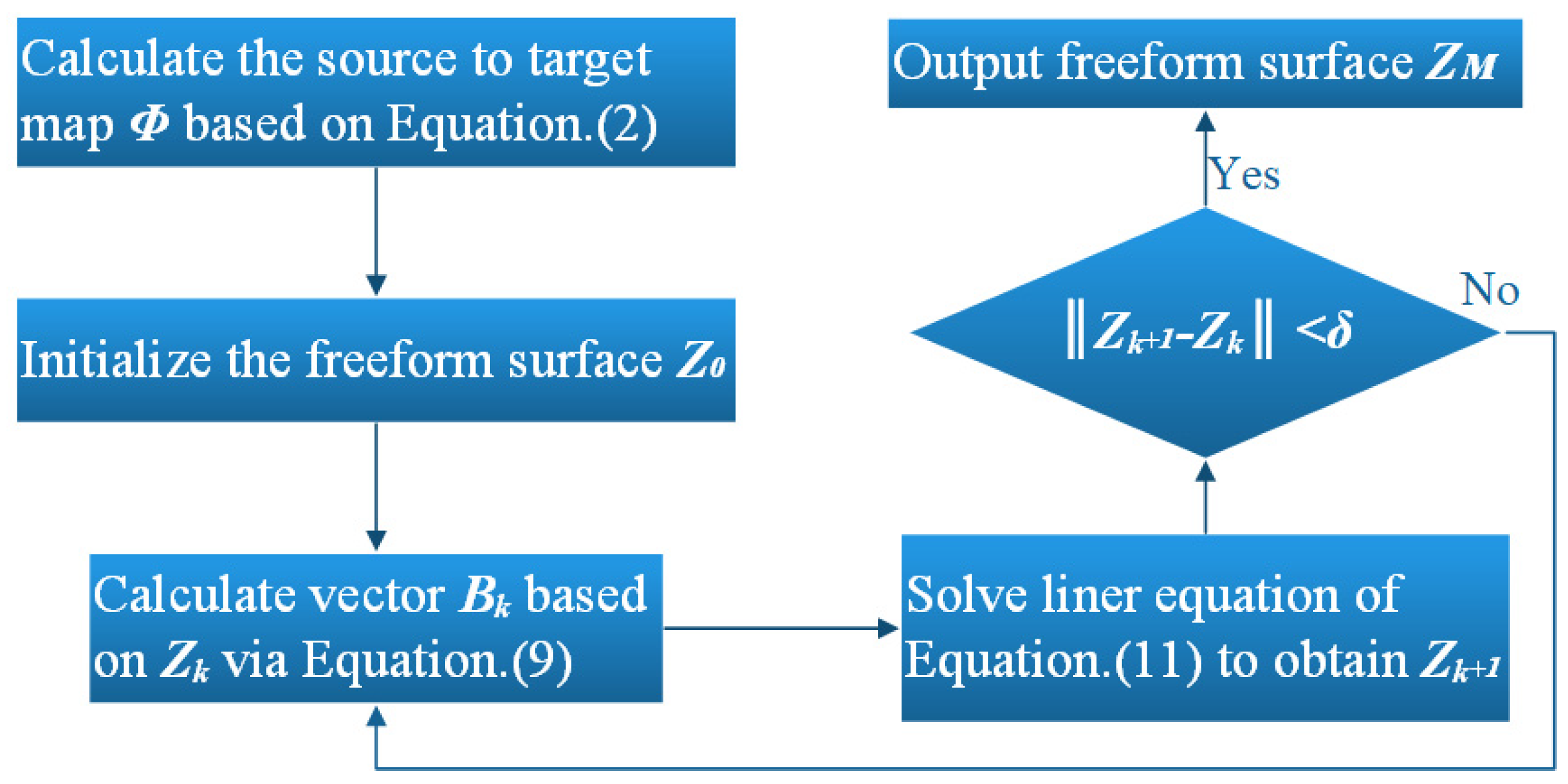
2.4. IFPI Process for BGE
3. Design Examples
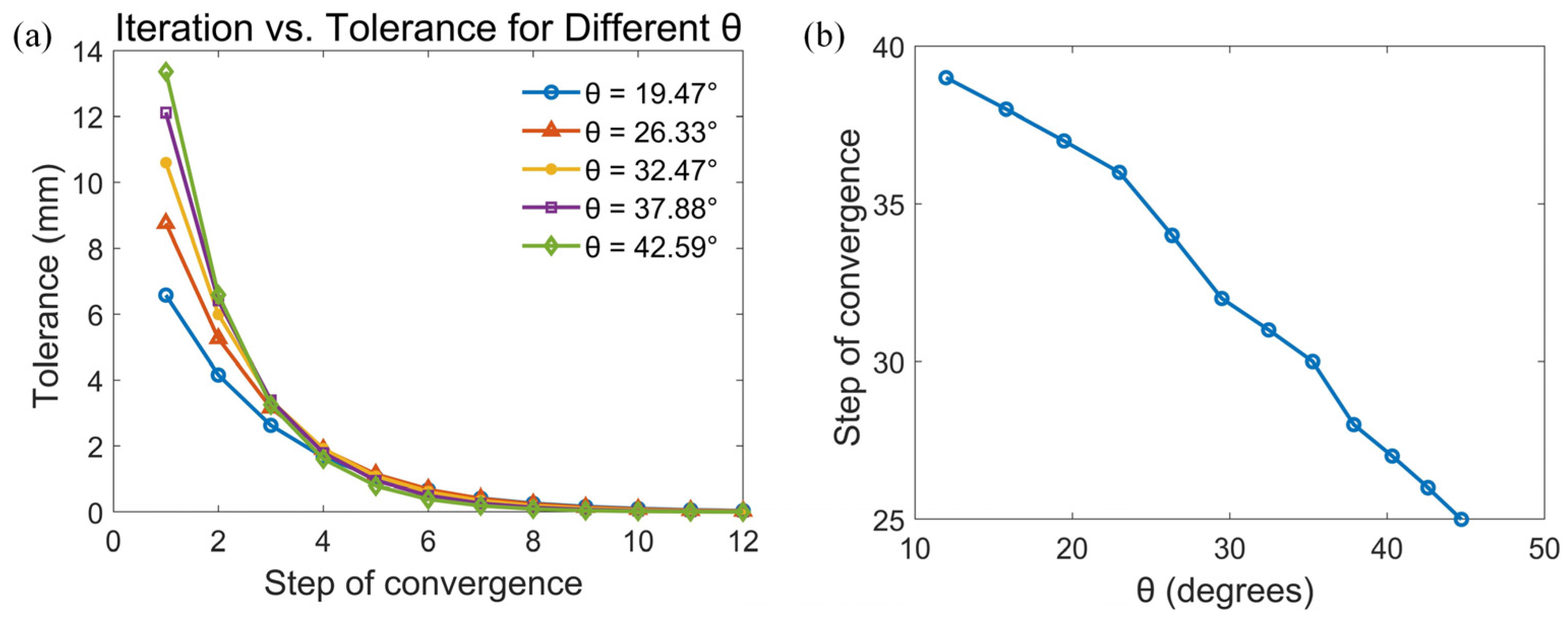
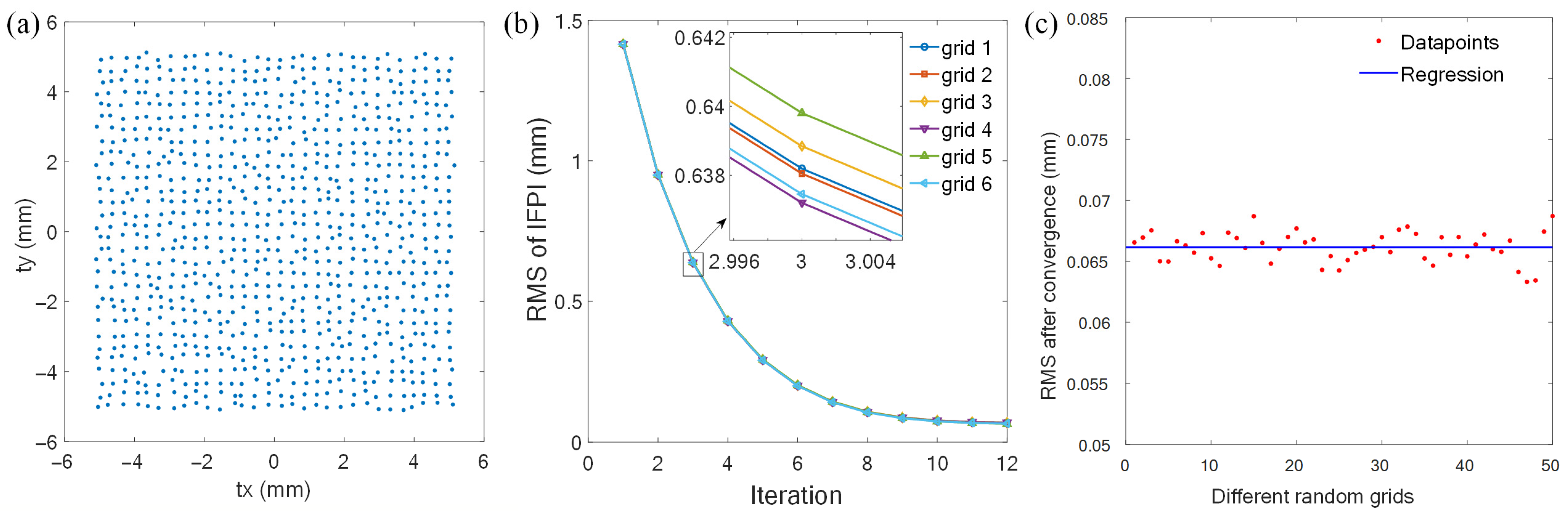
3.1. Convergence Characteristics in IFPI Freeform Construction
3.2. Comparison with Other Freeform Surface Construction Methods
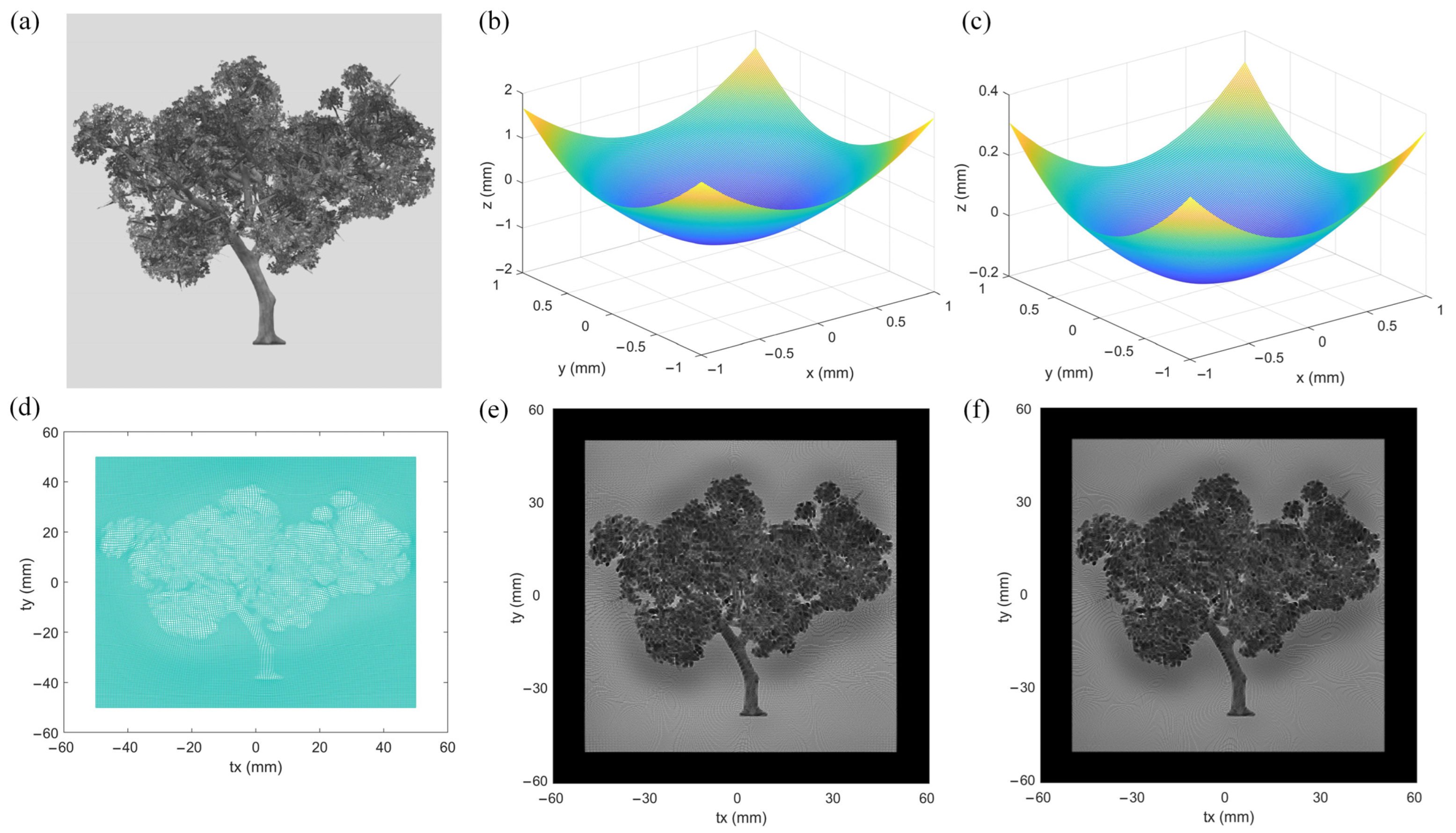
3.3. Complex Image Reproduction via IFPI
3.4. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| FPI | Fixed-point iteration |
| IFPI | Implicit fixed-point iteration |
| BGE | Balanced gradient equation |
| RMS | Root mean square |
| PDE | Partial differential equation |
Appendix A. Derivation of BGE
Appendix B. Derivation of Equation (8)
References
- Falaggis, K.; Rolland, J.; Duerr, F.; Sohn, A. Freeform optics: Introduction. Opt. Express 2022, 30, 6450–6455. [Google Scholar] [CrossRef] [PubMed]
- Wu, R.; Feng, Z.; Zheng, Z.; Liang, R.; Benítez, P.; Miñano, J.C.; Duerr, F. Design of Freeform Illumination Optics. Laser Photonics Rev. 2018, 12, 1700310. [Google Scholar] [CrossRef]
- Harald, R.; Julius, M. Tailored freeform optical surfaces. J. Opt. Soc. Am. A Opt. Image Sci. Vis. 2002, 19, 590–595. [Google Scholar]
- Wu, R.; Xu, L.; Liu, P.; Zhang, Y.; Zheng, Z.; Li, H.; Liu, X. Freeform illumination design: A nonlinear boundary problem for the elliptic Monge-Ampére equation. Opt. Lett. 2013, 38, 229–231. [Google Scholar] [CrossRef]
- Brix, K.; Hafizogullari, Y.; Platen, A. Designing illumination lenses and mirrors by the numerical solution of Monge-Ampere equations. J. Opt. Soc. Am. A Opt. Image Sci. Vis. 2015, 32, 2227–2236. [Google Scholar] [CrossRef]
- Romijn, L.B.; ten Thije Boonkkamp, J.H.; IJzerman, W.L. Freeform lens design for a point source and far-field target. J. Opt. Soc. Am. A Opt. Image Sci. Vis. 2019, 36, 1926–1939. [Google Scholar] [CrossRef]
- Feng, Z.; Cheng, D.; Wang, Y. Iterative wavefront tailoring to simplify freeform optical design for prescribed irradiance. Opt. Lett. 2019, 44, 2274–2277. [Google Scholar] [CrossRef]
- Feng, Z.; Cheng, D.; Wang, Y. Transferring freeform lens design into phase retrieval through intermediate irradiance transport. Opt. Lett. 2019, 44, 5501–5504. [Google Scholar] [CrossRef]
- Oliker, V.; Newman, E.; Prussner, L. Formula for computing illumination intensity in a mirror optical system. J. Opt. Soc. Am. A 1993, 10, 1895–1901. [Google Scholar] [CrossRef]
- Michaelis, D.; Schreiber, P.; Bräuer, A. Cartesian oval representation of freeform optics in illumination systems. Opt. Lett. 2011, 36, 918–920. [Google Scholar] [CrossRef]
- Wang, L.; Qian, K.; Luo, Y. Discontinuous free-form lens design for prescribed irradiance. Appl. Opt. 2007, 46, 3716–3723. [Google Scholar] [CrossRef] [PubMed]
- Luo, Y.; Feng, Z.; Han, Y.; Li, H. Design of compact and smooth free-form optical system with uniform illuminance for LED source. Opt. Express 2010, 18, 9055–9063. [Google Scholar] [CrossRef] [PubMed]
- Bruneton, A.; Bäuerle, A.; Wester, R.; Stollenwerk, J.; Loosen, P. High resolution irradiance tailoring using multiple freeform surfaces. Opt. Express 2013, 21, 10563–10571. [Google Scholar] [CrossRef] [PubMed]
- Schwartzburg, Y.; Testuz, R.; Tagliasacchi, A.; Pauly, M. High-contrast computational caustic design. ACM Trans. Graph. (TOG) 2014, 33, 74. [Google Scholar] [CrossRef]
- Mao, X.; Li, H.; Han, Y.; Luo, Y. Polar-grids based source-target mapping construction method for designing freeform illumination system for a lighting target with arbitrary shape. Opt. Express 2015, 23, 4313–4328. [Google Scholar] [CrossRef]
- Feng, Z.; Froese, B.D.; Liang, R. Freeform illumination optics construction following an optimal transport map. Appl. Opt. 2016, 55, 4301–4306. [Google Scholar] [CrossRef]
- Bösel, C.; Gross, H. Ray mapping approach for the efficient design of continuous freeform surfaces. Opt. Express 2016, 24, 14271–14282. [Google Scholar] [CrossRef]
- Mao, X.; Xu, S.; Hu, X.; Xie, Y. Design of a smooth freeform illumination system for a point light source based on polar-type optimal transport mapping. Appl. Opt. 2017, 56, 6324–6331. [Google Scholar] [CrossRef]
- Hou, J.; Zhou, Y.; Lin, K.; Li, Y. Freeform construction method for illumination design by using two orthogonal tangent vectors based on ray mapping. Appl. Opt. 2021, 60, 7069–7079. [Google Scholar] [CrossRef]
- Fournier, F.R.; Cassarly, W.J.; Rolland, J.P. Fast freeform reflector generation using source-target maps. Opt. Express 2010, 18, 5295–5304. [Google Scholar] [CrossRef]
- Desnijder, K.; Hanselaer, P.; Meuret, Y. Ray mapping method for off-axis and non-paraxial freeform illumination lens design. Opt. Lett. 2019, 44, 771–774. [Google Scholar] [CrossRef] [PubMed]
- Doskolovich, L.L.; Bykov, D.A.; Andreev, E.S.; Bezus, E.A.; Oliker, V. Designing double freeform surfaces for collimated beam shaping with optimal mass transportation and linear assignment problems. Opt. Express 2018, 26, 24602–24613. [Google Scholar] [CrossRef] [PubMed]
- Bykov, D.A.; Doskolovich, L.L.; Mingazov, A.A.; Bezus, E.A.; Kazanskiy, N.L. Linear assignment problem in the design of freeform refractive optical elements generating prescribed irradiance distributions. Opt. Express 2018, 26, 27812–27825. [Google Scholar] [CrossRef] [PubMed]
- Doskolovich, L.L.; Bykov, D.A.; Mingazov, A.A.; Bezus, E.A. Optimal mass transportation and linear assignment problems in the design of freeform refractive optical elements generating far-field irradiance distributions. Opt. Express 2019, 27, 13083–13097. [Google Scholar] [CrossRef]
- Wei, S.; Zhu, Z.; Fan, Z.; Ma, D. Least-squares ray mapping method for freeform illumination optics design. Opt. Express 2020, 28, 3811–3822. [Google Scholar] [CrossRef]
- Benamou, J.D.; Froese, B.D.; Oberman, A.M. Numerical solution of the Optimal Transportation problem using the Monge-Ampère equation. J. Comput. Phys. 2014, 260, 107–126. [Google Scholar] [CrossRef]
- Sulman, M.M.; Williams, J.; Russell, R.D. An efficient approach for the numerical solution of the Monge-Ampère equation. Appl. Numer. Math. 2010, 61, 298–307. [Google Scholar] [CrossRef]
- Rafiq, A. Implicit fixed point iterations. Rostock. Math. Kolloq. 2007, 62, 21–39. [Google Scholar]
- Gabriel, P.; Cuturi, M. Computational Optimal Transport; Working Papers; Now Foundations and Trends: Hanover, MA, USA, 2019. [Google Scholar]
- Driscoll, T.A.; Braun, R.J. Fundamentals of Numerical Computation: Julia Edition; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2022. [Google Scholar]
- Chen, L. Programming of Finite Difference Methods in MATLAB. 2007. Available online: https://www.math.uci.edu/~chenlong/226/FDMcode.pdf (accessed on 24 January 2024).

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Zhou, Y.; He, H.; Li, Y. Adaptive Construction of Freeform Surface to Integrable Ray Mapping Using Implicit Fixed-Point Iteration. Photonics 2025, 12, 134. https://doi.org/10.3390/photonics12020134
Chen J, Zhou Y, He H, Li Y. Adaptive Construction of Freeform Surface to Integrable Ray Mapping Using Implicit Fixed-Point Iteration. Photonics. 2025; 12(2):134. https://doi.org/10.3390/photonics12020134
Chicago/Turabian StyleChen, Jiahua, Yangui Zhou, Hexiang He, and Yongyao Li. 2025. "Adaptive Construction of Freeform Surface to Integrable Ray Mapping Using Implicit Fixed-Point Iteration" Photonics 12, no. 2: 134. https://doi.org/10.3390/photonics12020134
APA StyleChen, J., Zhou, Y., He, H., & Li, Y. (2025). Adaptive Construction of Freeform Surface to Integrable Ray Mapping Using Implicit Fixed-Point Iteration. Photonics, 12(2), 134. https://doi.org/10.3390/photonics12020134