1. Introduction
In recent times, wildfires have become increasingly frequent due to global warming and environmental changes, posing significant threats to ecosystems and endangering numerous wildlife species. These events often result from high-temperature heat waves that ignite forest areas, causing extensive damage to natural resources, the environment, and our ecosystem. To mitigate these threats and protect wildlife, it is essential to develop an effective wildfire communication detection system. Traditional monitoring and planetary imaging systems are limited by their passive nature and inability to provide real-time data monitoring [
1]. Enhancing the accuracy and efficiency of such systems can be achieved through the integration of an unmanned aerial vehicle (UAV) optical communication technique, which offers a promising solution for real-time observation and monitoring.
Unlike conventional radio frequency (RF) communication, the optical communication framework offers a secure, high-bandwidth, and interference-resistant alternative, enhancing situational awareness and firefighting strategies. The UAV wildfire optical communications (WOC) system incorporates advanced optical sensors, high-resolution cameras, and laser communication devices mounted on UAV platforms. These state-of-the-art technologies enable UAVs to navigate challenging terrains, collect critical data swiftly, and communicate seamlessly with ground control centers and other UAVs. This integration facilitates a rapid and coordinated response to wildfire incidents, significantly boosting the operational capabilities of firefighting agencies in addressing these disasters with unprecedented efficiency.
The operational and deployment costs of UAVs are as nominal as those of aircraft and satellite imagery of higher costs. An additional benefit of deploying hovering UAVs at wildfire sites is the real-time communication combined with high-resolution imaging at low altitudes. It should be noted that the effective location and monitoring of wildfire sites are facilitated by the flexible movement of these hovering UAVs. The UAV-enabled communication system applies to burning warnings such as new confirmed fires emerging from affected wildfire locations [
2].However, heat waves continuously increase temperature, and primary observation means that the heat waves offer an early warning of fires. Most recently, heat waves hit Europe which was the cause of the rising atmospheric temperature, placing forests at wildfire risk [
3]. In particular, in Portugal during 2023, the two wildfire events occurred in Odemira and Ourem, which are 200 km and 140 m from the capital Lisbon [
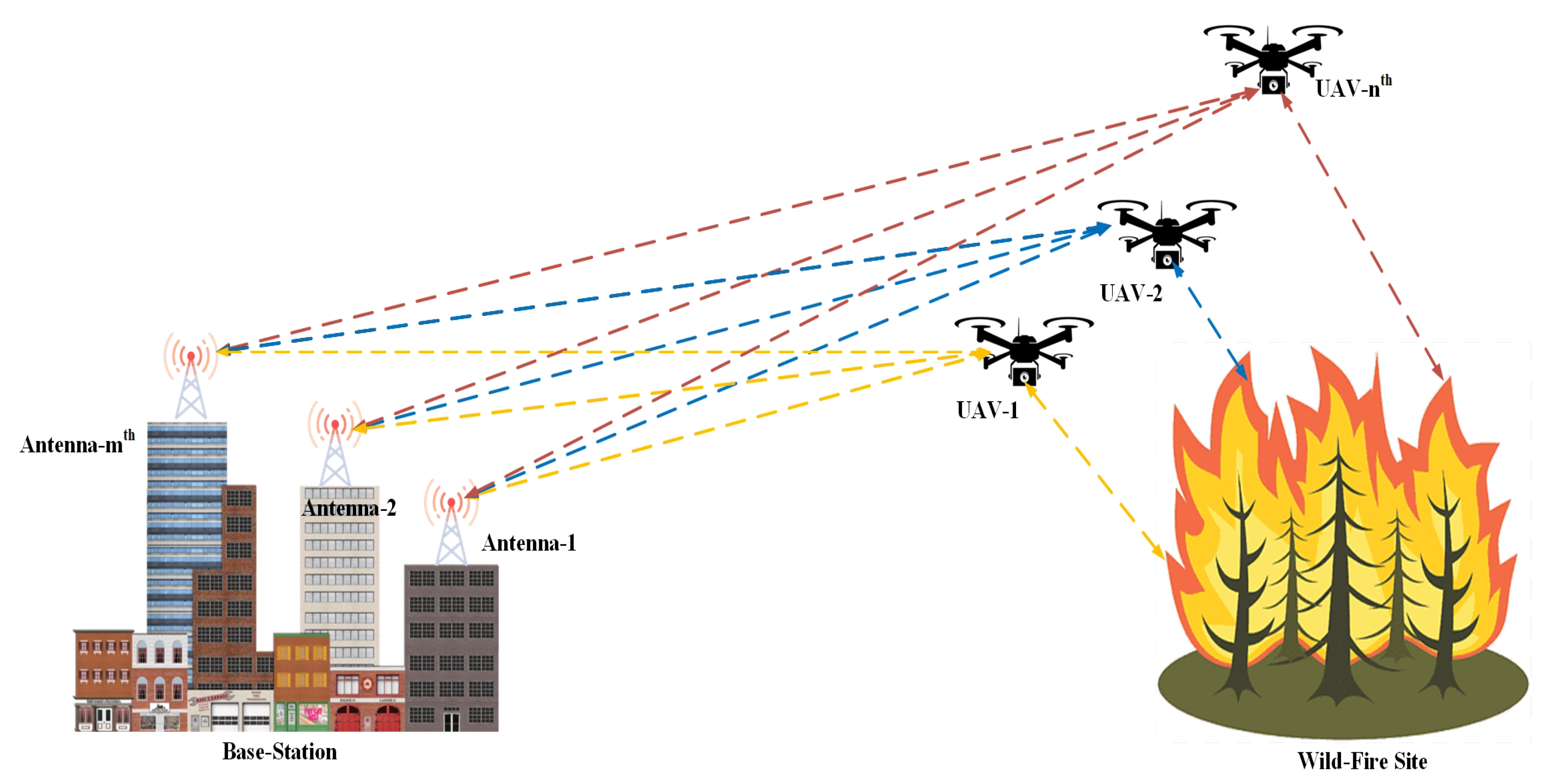
4]. However, the government authorities suspect and declare approximately 120 municipalities across Portugal at maximum risk of wildfires. The combination of scorching temperatures and very low humidity causes the water reservoirs to evaporate at a faster rate than in recent years. Therefore, an immediate call was required to find the wildfire sites before the events happened to save lives. Throughout this study, a wildfire UAV-enabled communication system is proposed (
Figure 1).
The optical communication devices further enhance the system capabilities by facilitating rapid and secure data transmission, fostering seamless communication and collaboration among multiple UAVs and ground control centers [
5,
6]. An optical wireless communication (OWC) not only overcomes the shortcomings of traditional firefighting methods but also ushers in a new era of innovation in reducing the impact of wildfires on communities and ecosystems. At a glance, the UAVs provide remote virtual access to observe the affected sites. The UAV recorded data could be in real time, highly accurate in positioning at the affected site, and provide an emergency call for safety purposes [
7,
8]. Moreover, the mobility of UAVs allows for rapid and continuous video streaming of spreading wildfires in forests. The deployment of multiple UAVs can be more profitable by scanning the affected area in multiple passes and incorporating base stations (BSs).
1.1. Literature Review
The most recent survey work discussed wildfire detection technologies [
9], where the authors discussed the different UAV-enabled detection approaches. The advantageous deployment of UAVs offers the flexibility to reduce the cost, making it more suitable to reach remotely accessible recovery areas. A comprehensive study summarized the collaborative communication in a multi-UAV system [
10]. The Internet of Things (IoT) network plays an important role in detecting wildfires. The role of the UAV-IoT futuristic wildfire detection system is highlighted, where the authors propose the discrete-time Markov chain (DTMC) method for fire detection in [
11]. The challenges pose a threat of deploying the wildfire detection and management system to increase the frequency of wildfire detection systems. Therefore, the authors proposed a UAV-IoT-enabled wildfire detection system in [
11]. Similarly, the authors in [
12] proposed an optimized UAV wildfire monitoring and communication system algorithm in various fields. The authors in [
13] investigated an optimal routing of the remote monitoring resources for a self-sufficient low-cost wildfire mitigation model (SL-PWR), which utilizes predicted spatiotemporal wildfire probability maps of the utility service area and optimized unmanned aerial vehicle (UAV) monitoring trees to obtain input images for training the SL-PWR modules. Correspondingly, an optimization unmanned aircraft system (UAS) model was developed to minimize the total amount of energy within the real-time data that must be transferred with the nearest base station [
14].
On the other hand, an effective cooperative control framework for decision-making progress among the multiple agents is required. The authors in [
15] proposed a cooperative control framework for a hierarchical UAV platform. However, this research included the greater possibilities of an optical wildfire detection communication system (OWDC) in real-time observation. The most recent work contains the three main aspects of early wildfire detection methodology and distance estimation for infrared images by utilizing UAV, such as in [
16]. In [
16], the authors targeted the smoke and suspected flame segmentation, wildfire spot distances, and infrared images for wildfire detection sites. In the extension of real-time data streaming of capturing images of wildfire sites, the authors in [
17] proposed a deep learning model that transmits the affected site images collected by UAV to the base station for further analysis. Multi-UAV systems can offer a potential solution for wildfire detection and rescuing wildlife. Therefore, a multi-UAV wildfire detection framework was proposed to integrate sensing and operation in large-scale and dynamic wildfire environments [
18].
Furthermore, this research work is organized as follows: the research work is proposed to reduce the complexity of the system by implementing the OOK scheme for its simplicity. The OOK scheme was chosen to improve the communication efficiency among transceivers rather than higher modulation techniques. The higher modulation techniques can be applicable in wildfire events but offer high complexity and cost, and affect communication efficiency. Therefore, the OOK scheme is adopted in this work. The proposed system model, channel coefficients, and communication links are designed by intensity modulation and direct detection (IM/DD), taking into account the OOK modulation/demodulation scheme in
Section 2. The end-to-end (E2E) performance metrics such as average BER and outage probability are analytically derived in
Section 3. The numerical parameters and simulation results based on experimental data are widely discussed in
Section 4. Finally, the whole work is summarized in
Section 5.
1.2. Main Contribution
Throughout this research work, we developed optical wildfire communication and monitoring systems using various UAV setups. The main contributions of this research are as follows:
In this research, the development of the traditional wildfire communication technique is proposed to support real-time data streaming and rescue operations, improving video quality, and high-resolution imaging in wildfire sites. A quick response in real-time wildfire monitoring in remote areas by utilizing the unmanned aerial vehicles approach is proposed, as in [
11]. An additional wildfire surveillance approach for early detection of remote sites and a quick response rather than satellite imaging and remotely operated drones was proposed in [
19]. However, both of the existing works [
11,
19] lack the real experimental data-based MIMO wildfire optical approach for a very fast response in real-time monitoring. Therefore, our proposed scheme extended the existing wildfire approaches in real-time scenarios based on the experimental data. In addition to that, UAV-based wildfire communications are beneficial for sensing and capturing real-time data such as moisture, temperature, wind speed, etc., which could be further useful for the accurate prediction of fire spread rate. Therefore, the main contribution of this study is significantly important in the sphere of the provision in perspective of datasets.
Our previous study of single-input–multi-output (SIMO) underwater visible light communication (UVLC) proposed a novel approach to signal transmission within moderate-to-strong turbulence channel conditions [
20]. The SIMO-UVLC system is designed under consideration of gamma–gamma distribution towards the next generation of wireless networking systems. Therefore, this study extends and comprises the work in wildfire optical communication. This research proposes the diversity of optical communication within MIMO, MISO, SIMO, and SISO proposed communication models under strong turbulence channel conditions towards 5 GB wireless networking systems. It should be noted that the strong turbulence channel is designed taking into account the gamma–gamma distribution and the channel parameters
and
are calculated based on the real environmental data.
The novel closed-form analytical expressions are derived from and comprise existing models. It is noteworthy that the path loss is deterministic, whereas the turbulence channel conditions are modeled by considering the random variables. Consequently, the proposed system is designed under intensity-modulation and direct-detection (IM/DD) following the OOK modulation/demodulation scheme.
The evaluation of performance metrics, the average BER (ABER), and outage probability () of the proposed system models are well investigated and further simulated based on real-time experimental data. Performance metrics are depicted at different altitudes of UAVs. The experimental data are used based on the temperature, humidity, wind speed, and other environmental factors.
2. Wildfire Communication System Design
In this research, it is considered that the
nth number of UAVs communicate with the
mth number of monitoring base stations (BSs) through optical links within the harsh channel conditions. The proposed wildfire communication system model is depicted in
Figure 1, where multiple UAVs transmit captured data from the affected site to the BS. It is obvious that the UAVs capture the wildfire data and transfer them to the BS, enabling combining methodology. It should be noted that each UAV can share information with an individual BS for a high probability of communication. The received signal at the BS within the multi-input–multi-output (MIMO) approach in full-duplex mode communication scenario toward the 5G and 6G wireless network is given as follows:
where the parameters
n and
m represent the number of transmitted and receiver aperture within the IM/DD technique by following the on–off-keying (OOK) modulation/demodulation scheme. However, in this research, the parameters are considered as
for equalization, where
, the responsivity of the photodetector is
, the optical-to-electric conversion efficiency is
, the transmitted information symbol is
x, and
is the AWGN noise within the
links of UAVs with zero means and the variance
, respectively. The normalized optical beam irradiance of
nth transmitter to
mth receiver is denoted by
. It is noteworthy that
is considered by implying the signal among
communication nodes, where the path loss (
) and atmospheric turbulence
conditions are determined. Therefore, the combined channel conditions in terms of optical beam irradiance could be written as
=
, where
is deterministic.
2.1. Managing Signal Power of UAV
Generally, optical communication links are widely defined based on the IM/DD approach. The simplicity of OOK modulation provides quite a significant suitability for UAV platforms, where the communication nodes consume high-energy constraints . However, it is necessary to maintain the linear relationship among the UAV nodes in their operational flight times. The optical powers received must not go beyond the threshold power that produces a nonlinear effect. It is noteworthy that the transmitted average power is defined as .
In OOK modulation, for the power level (
) of the encoding FSO signal, which maintains the linearity
for constellation purpose, the selecting signal power level
is written as
. Furthermore, in this proposed wildfire detection system model enabled by the FSO IMDD-OOK UAV, the selection of power levels
for the uniformity of distributed information
can be written as follows:
It is noteworthy that in this work the transmission power
for binary digit 0 and
for binary digit 1 is assigned. Therefore, the average power
selection in IM/DD-OOK modulation technique of an individual UAV followed AWGN noise is written as follows:
Several challenges and solutions are associated with enabling wildfire management through scalable UAV-based communication systems. As the number of UAVs increases, bandwidth management becomes very important to avoid communication bottlenecks, with adaptive bandwidth allocation and hierarchical network designs being among the possible solutions. In the presence of dynamic environmental conditions and physical obstructions, there should be adaptive beam steering and multipath routing that will help maintain stable line-of-sight optical links (LOSs). The energy is also essential for a high probability of communication. It is noteworthy that the implementation of energy-efficient communication protocols can improve the system efficiency and quality of services. The base stations should be capable of handling increased data from several UAVs and necessitating scalable processing systems to prevent overload and latency. Simulations across various deployments under different environmental conditions can provide valuable insights into network performance, link stability, processing efficiency, and operational effectiveness.
The integration of UAV-based optical communication systems towards existing firefighting and emergency response infrastructure offers a transformative solution to wildfire management. By bridging the capabilities of satellites, ground sensors, and traditional networks, UAVs enhance overall situational awareness and operational efficiency. However, the satellites provide macro-level imagery data, but UAVs capture high-resolution imaging in real-time views, especially in those sites where satellites face limitations such as clouds and mountains. The ground-based sensors for localization environmental monitoring benefit from UAVs acting as mobile relays, extending the reach of sensor data to command centers, even when traditional infrastructure is compromised. Furthermore, UAVs can augment and extend traditional communication networks by establishing ad hoc connections in remote areas, ensuring continuous and reliable communication among firefighting teams. This integration enables a robust, dynamic, and resilient response system, allowing for precise resource allocation, comprehensive monitoring, and adaptive coordination. The synergy between these advanced UAV systems and existing infrastructure ensures a multilayered defense against wildfires, enhancing both immediate response capabilities and long-term management strategies.
2.2. Approximated Path-Loss Channel Coefficient
In this study, the optical link is considered to be directly affected by the atmospheric conditions for fire data collection, the smoke of wildfire events, the capture of critical temperature, and detection activities. Due to harsh atmospheric channel conditions, the optical link severs attenuation in terms of extinction coefficient. Therefore, this study utilizes Beer Lambert’s law [
21] which is written as
where the atmospheric extinction coefficient
totally depends on optical-beam wavelength. The channel parameters, atmospheric visibility
V (in km), and the size distribution coefficient of scattering
, along with the distance
L between
n and
m nodes, are considered [
22]. Further, the path loss of each optical link is written as follows [
23]:
2.3. Turbulence Channel Conditions
In this research, the optical turbulence channel conditions are modeled under the gamma–gamma distribution model, which is a significant distribution for irregularities in the terrain, leading to multipath effects, and more suitable for optimizing the system performances [
24]. The GG distribution is widely acknowledged as the most appropriate model for describing atmospheric turbulence in moderate to strong turbulence regimes [
25]. Furthermore, the GG model is attractive from a performance analysis standpoint, particularly for MIMO FSO systems, where the distribution of the sum of independent GG variation needs to be determined. The GG distribution can provide more accurate results, especially in moderate to strong turbulence conditions. Additionally, the GG model works under all types of turbulence and offers better results [
26]. The probability distribution function (PDF) of atmospheric turbulence channel conditions
kth optical links of the proposed system model in terms of the generalized G-Meijer function is given as [
27,
28], where
k is path links between
nodes and the PDF for
kth layer is written as follows:
where
is the combined vector of
communication nodes within
kth layer, and the parameters are used in (
6) along with the argument
as follows:
The large and small scale factors for the optical link can be written as [
29]
For the optical link in (
7) and (
8), the scintillation index is denoted by
, which is known as the Rytov variance and further calculated as
=
. However, in the Rytov variance, the number of optical waves is denoted by
, which depends on the wavelength of the transmitted signal
, and
, along with the diameter of the receiver aperture
. The refraction index is described by
, which varies from
(for strong turbulence regime) to
(for weak turbulence regime) with uncertainties values at
. Additionally, the Rytov variance associated with large-scale cells at
, while
refers to small-scale cells taken into account by the plane wave model.
Generally, the refraction index is given as follows [
30]:
where
v is the wind speed,
A represents the level of
, and
h is the altitude of an individual UAV. It is noteworthy that the outage performance is obtained based on varying altitudes for analysis as h = 25 m, 30 m, 35 m, and 40 m, respectively. However, in this study, the performance metrics are simulated at different altitudes of UAVs in
Section 4.
The instantaneous electrical SNR
in relation to average electrical SNR could be written as
. Further normalizing
to utilize the average SNR
into (
6), for equal gain, the PDF in terms of instantaneous SNR investigating the CDF is derived according to
Appendix A:
To obtain the cumulative distribution function (CDF) of (
6) as
=
, we utilized the properties of Wolfram Mathematica ([
31], 07.34.21.0084.01) and obtained the expression in (
11) as follows:
However, the argument
in (
11) can be written as follows:
4. Numerical Evaluation and Simulation Results
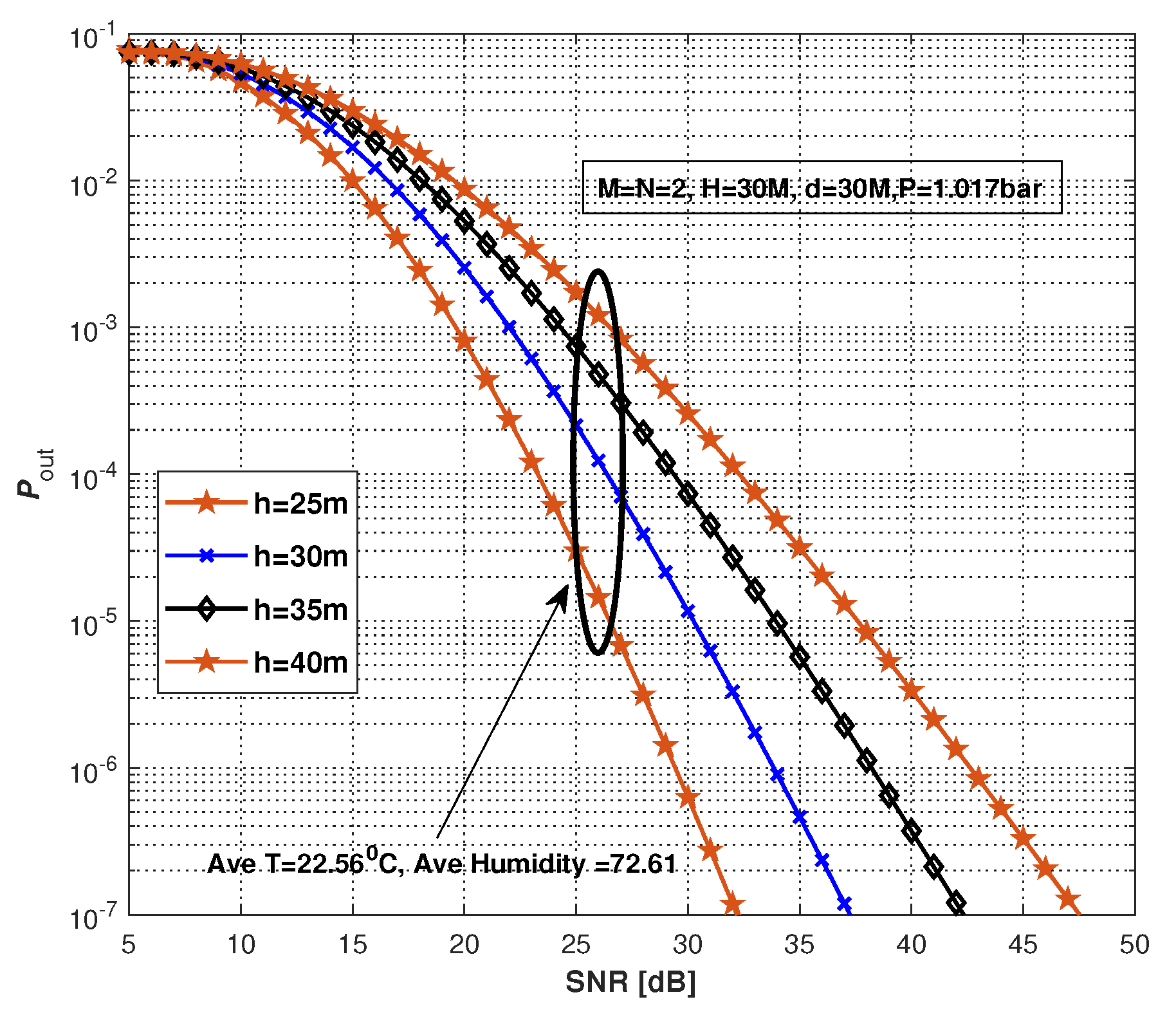
In this section, the performance metrics of MIMO, MISO, SIMO, and SISO are simulated according to channel characteristics. However, we fixed the distance between the UAVs and the BS at 30 m, which could vary according to the requirements. Additionally, the results are generally depicted at the altitude of 25 m to 40 m of the UAV above ground level. The altitude can be increased according to the specific purpose or the requirement. However, the RF-enabled UAVs hover on higher altitudes rather than the optical-enabled UAVS. In this study, we considered the varying altitude of UAVs as 25 m, 30 m, 35 m, and 40 m to closely capture the affected site data. The UAVs are associated with optical links that can be easily affected by sunlight or any other environmental background. Therefore, we considered the fixed altitude for UAVs for more reliability and extension of this work. The average temperature, humidity, and pressure of July in Lisbon, Portugal, were taken for simulation results as °C, 72.61 g/m, and bar. The and particles are modeled based on the average atmospheric conditions under plan wave modulation and based on the refractive index .
In
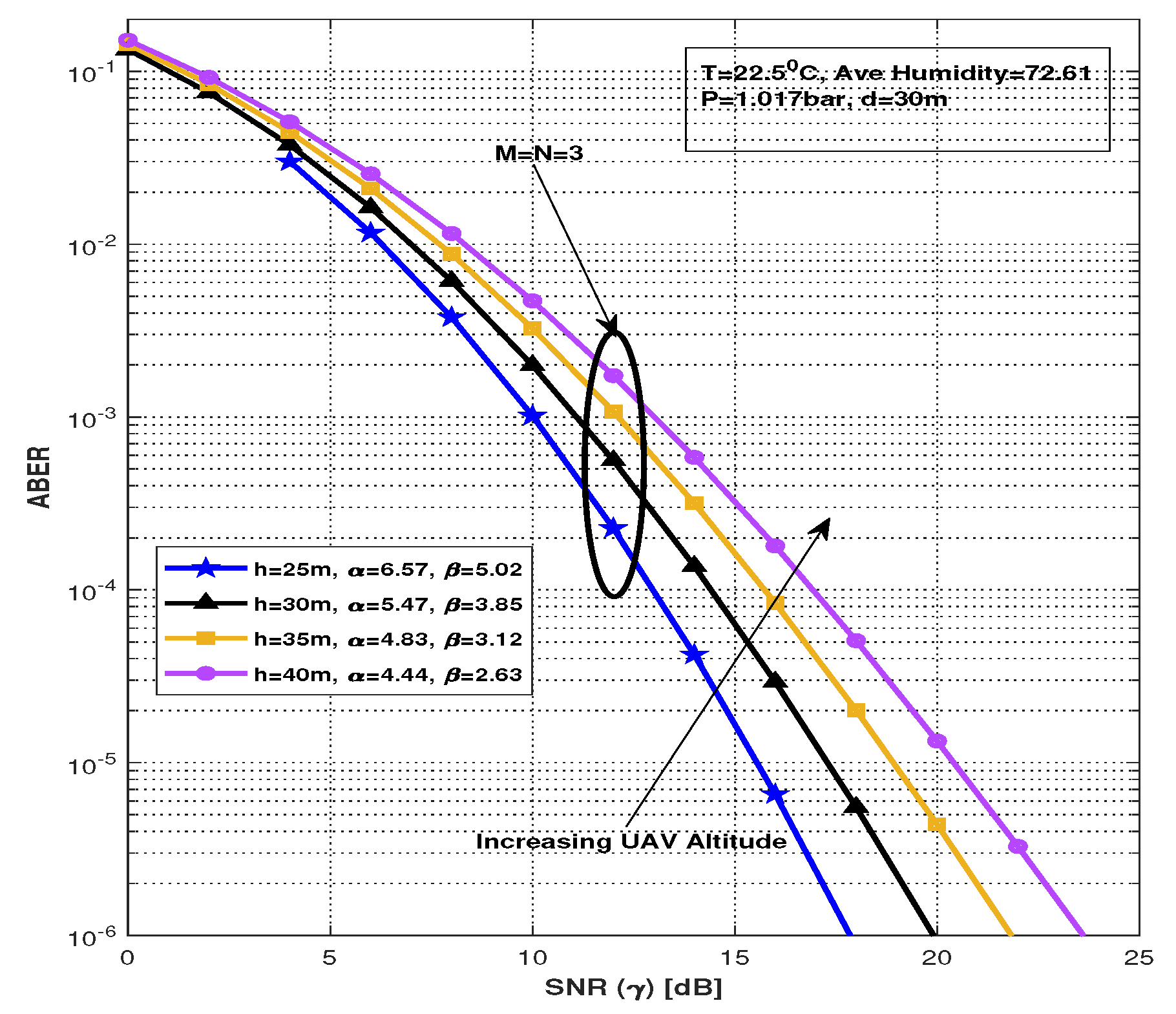
Figure 2, the ABER performances are depicted on varying UAV altitude and BS while the other parameters are fixed as T = 22.5 °C and average humidity 72.61 g/m
. It should be noted that the results were obtained taking into account the equal number of transmitters and receivers. It can be seen that with the increasing altitude of UAVs, the performances become poor. This is because of the harsh conditions in the channel on increasing height. However, the best ABER performances are depicted at
m of an individual UAV. If targeting
BER, the performances outperform in the 16 dB SNR regimes, while in the
regimes they are the poorest in the high-SNR regimes.
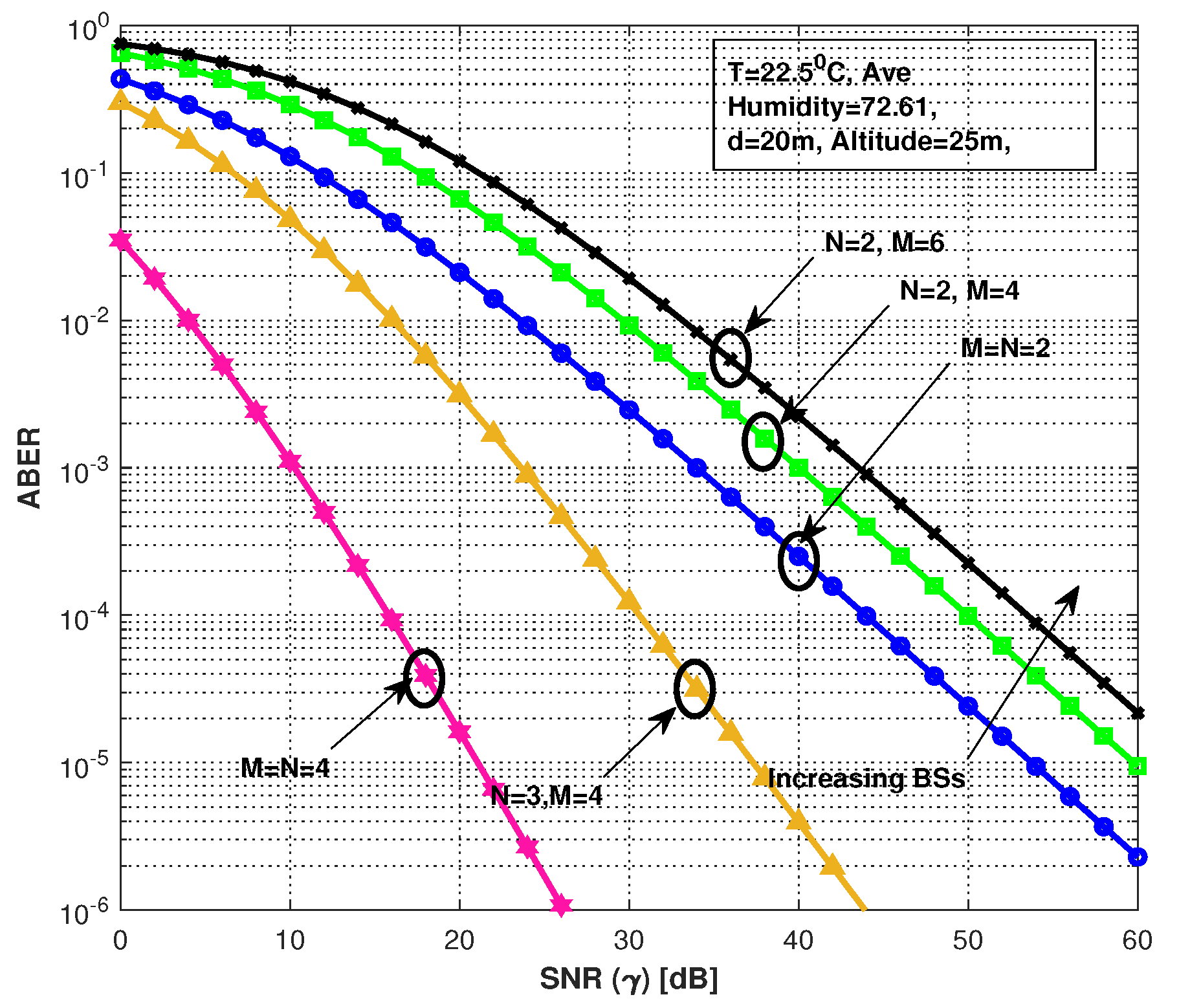
Figure 3 shows the performance of ABER on varying numbers of UAVs and BSs. Firstly, the results are obtained when increasing the number of BSs while the number of UAVs is kept constant. It can be seen that when increasing BSs the performance reduces simultaneously, while other parameters are fixed as
m and
m. On the other hand, if the number of UAVs increases, the performance improves significantly. This is because of the number of source nodes and the high probability of receiving signals from multiple communication nodes. It also includes the performance in equalizing the number of UAVs and the BSs, which could achieve the best performance. However, upon concluding these results, the ABER improves if it deploys an equal number of communication nodes. The distance between communication nodes and channel parameters influences the performance metrics. Another way to obtain these results is when increasing the number of BSs, the performance reduces in high-SNR conditions. However, reducing the number of BSs improves within low-SNR regimes.
Upon continuous shifting parameters,
Figure 4 shows the ABER performance of the proposed system model as MIMO, MISO, SIMO, and SISO wildfire detection. In this study, real data were used to depict the performance of the system. Therefore, the MIMO and MISO systems obtained superior performance compared to those of SIMO and SISO. The reason is discussed in
Figure 3. Interestingly, the MISO detection system outperforms MIMO. According to
Figure 3, it is shown that increased UAVs improve performance. The SIMO and SISO have less probability of multiple-node communication. Therefore, MIMO and MISO systems obtain higher ABER performance in low-SNR conditions compared to SIMO and SISO detection models.
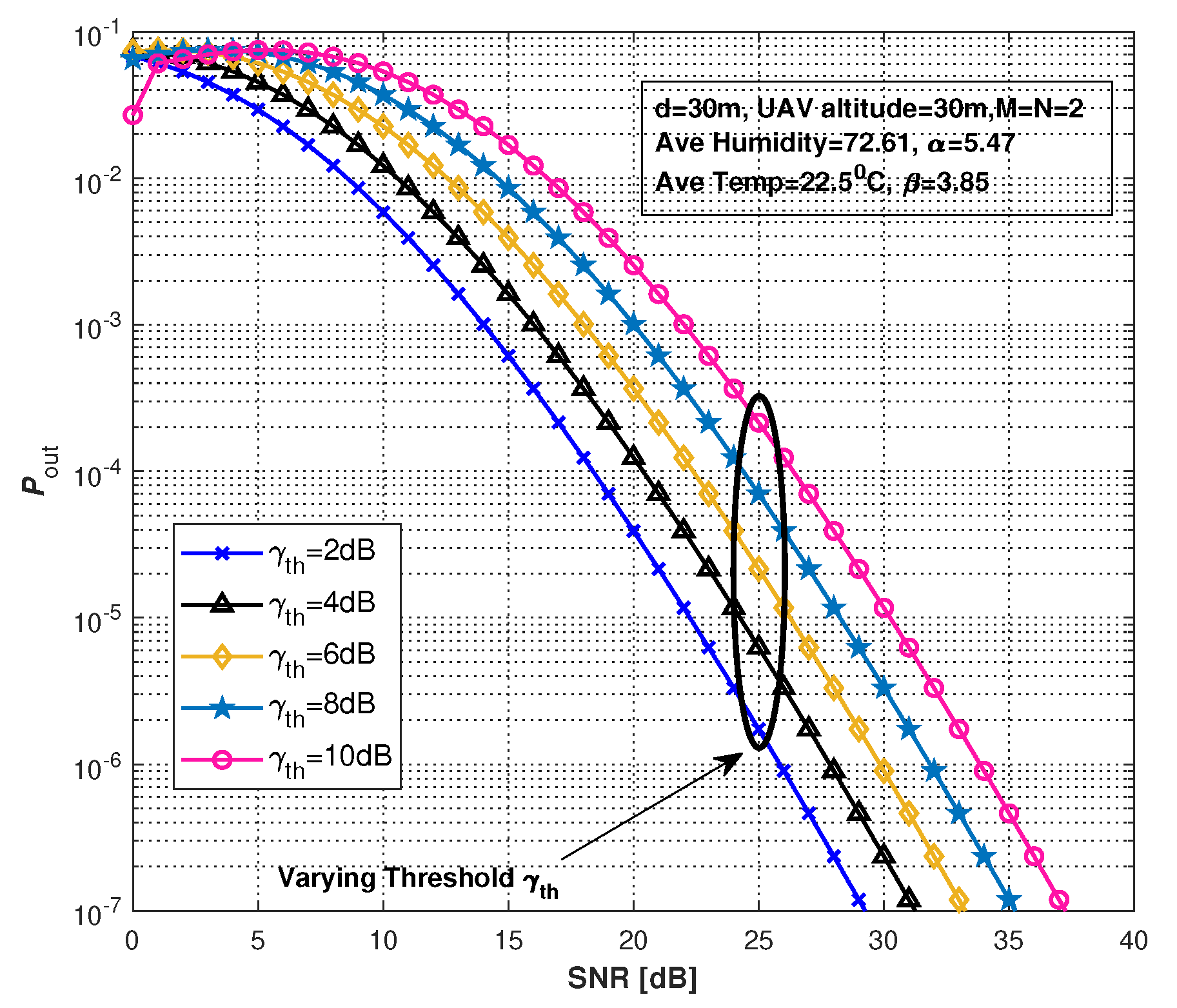
Throughout
Figure 5, the outage performance of the proposed system is depicted on successive threshold SNRs in strong turbulence channel conditions, when other parameters are kept fixed. It can be seen that as
increases, the probability of the outage shows poor performance. It should be noted that the best performance is obtained at
dB while the average performance is obtained at
dB. In this figure, the numbers of UAVs and BSs are kept equal for simulation results as
, and the average temperature and humidity are taken as
°C and 72.61 g/m
. However, the results are obtained at fixed communication distance and UAV altitude of
m and
m. The closed-form expression in (
13) is used to obtain the simulation results.
Finally, in
Figure 6, the outage performance is depicted on varying UAV altitudes which vary from 25 m to 40 m above ground level. Similarly, increasing UAV altitude reduces the system performance and directly affects it, due to strong turbulence channel conditions. In this figure, the results are obtained at average temperature and humidity, as in
Figure 5. The best performance is obtained at 25 m at the lowest SNR regimes because it is the shortest distance compared to other UAV altitudes.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}