Polarization-Based Reflection Suppression Method and Its Application to Target Detection


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Polarization Reflection Suppression Method
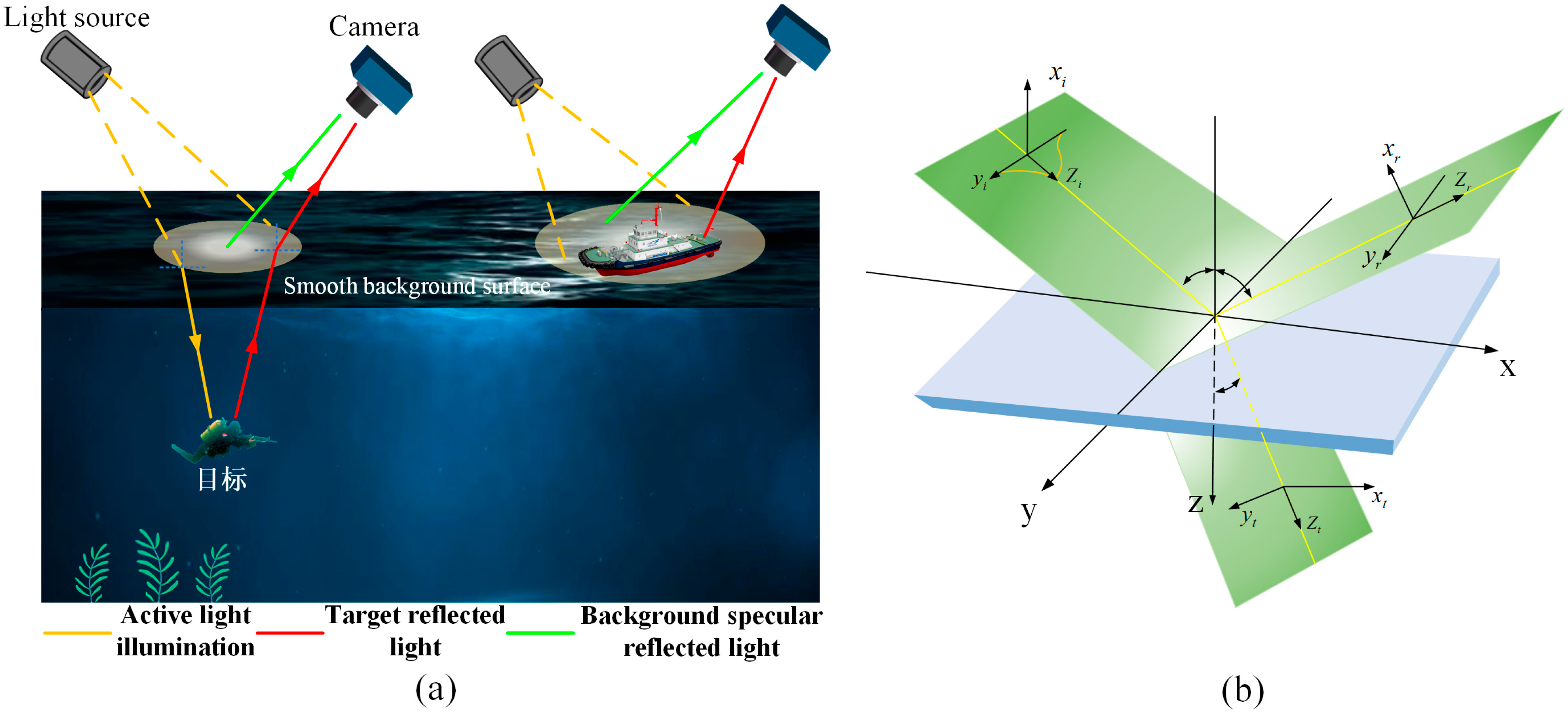
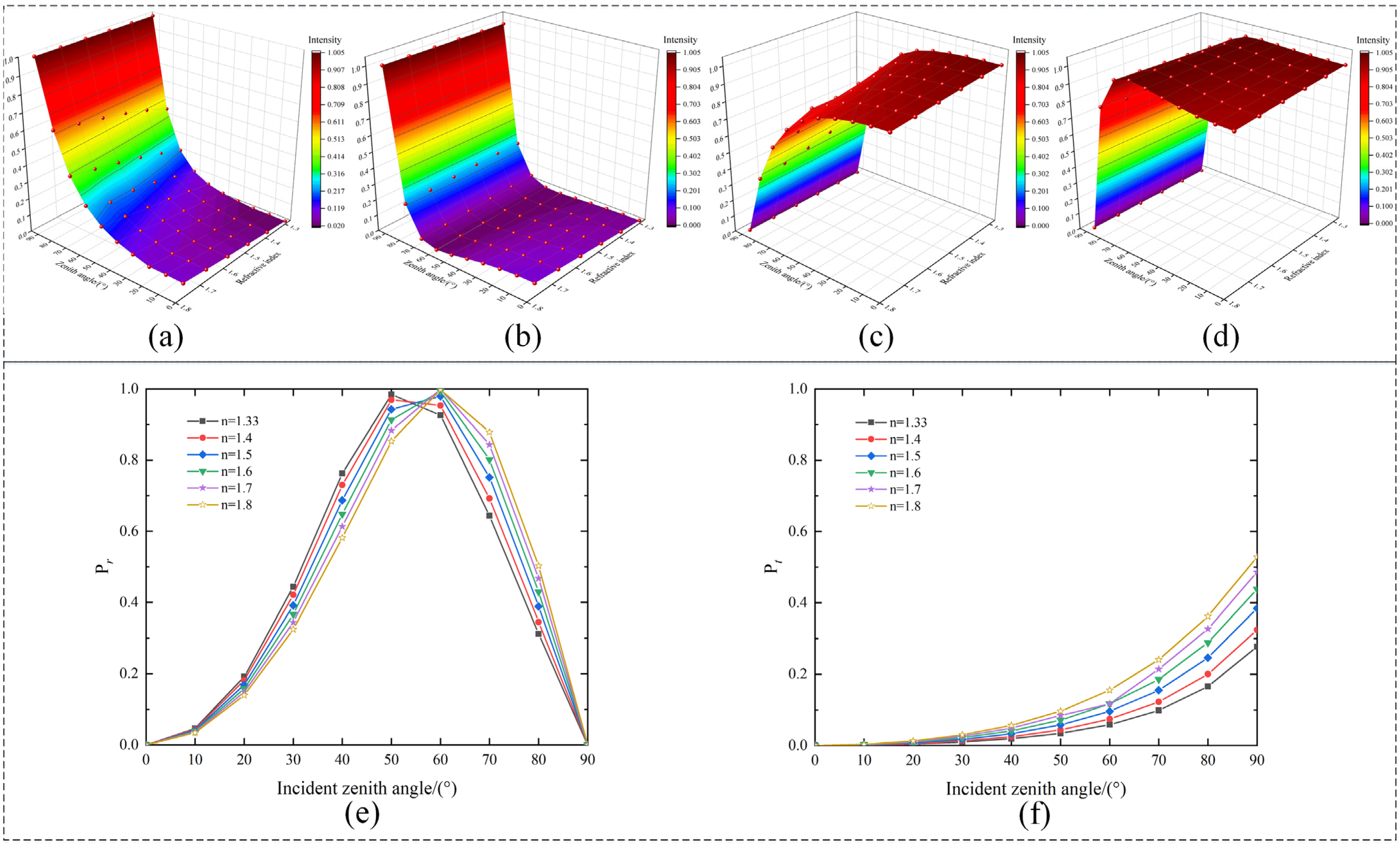
2.1. Analysis of Polarization Characteristics of Reflected and Refracted Light
2.2. Polarization Decomposition of Mueller Matrices
2.3. Reflection Suppression Method for Orthogonal Polarization Imaging
3. Experiment on Polarization Reflection Suppression
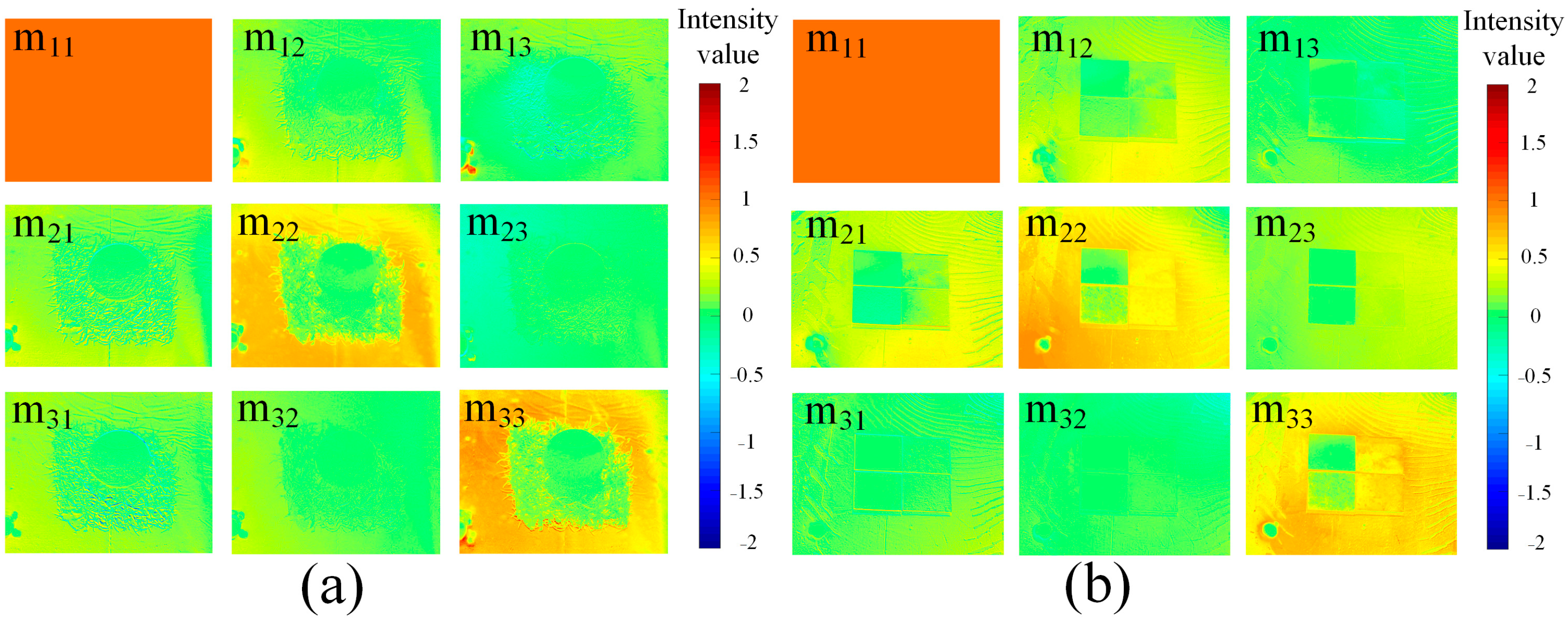
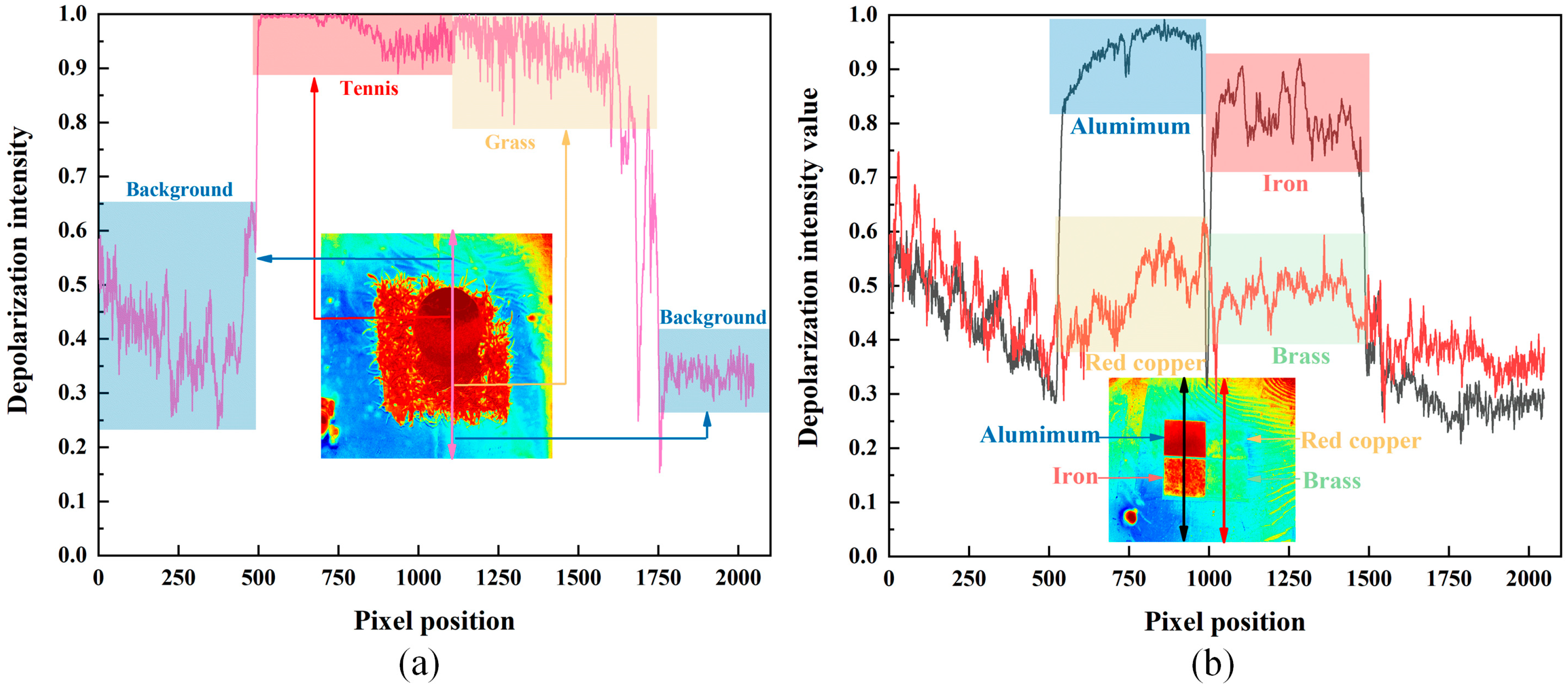
3.1. Analysis of Mueller Matrix Characteristics
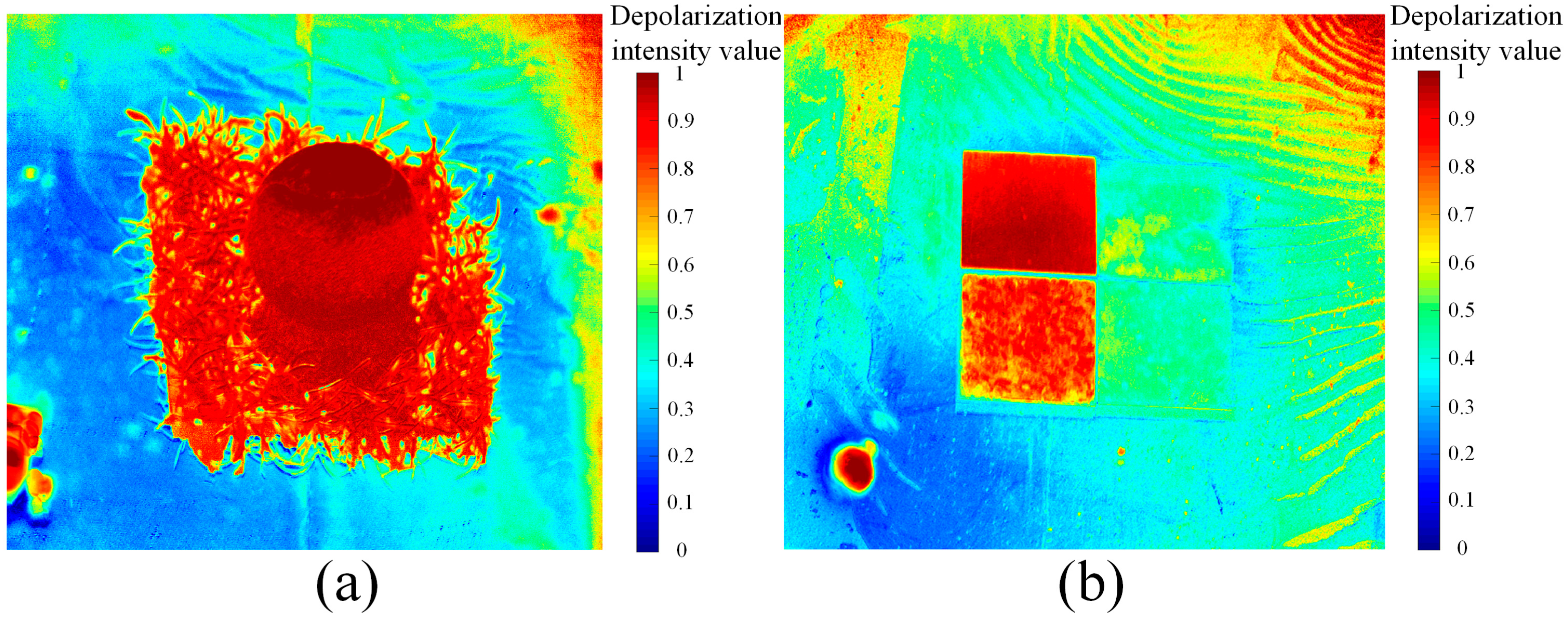
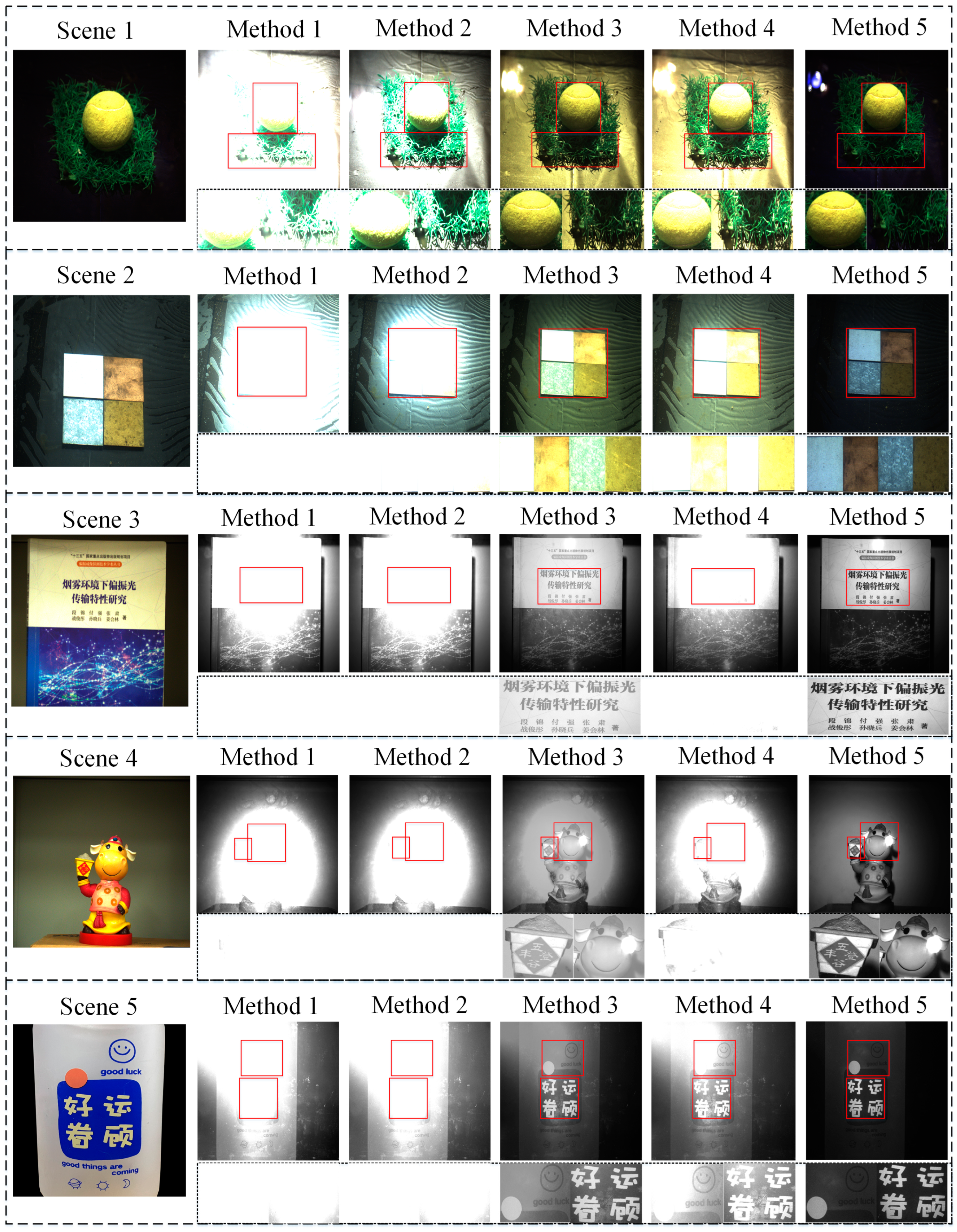
3.2. Analysis of Experimental Results on Polarization Reflection Suppression
4. Application of Reflection Suppression Methods to Moving Target Detection
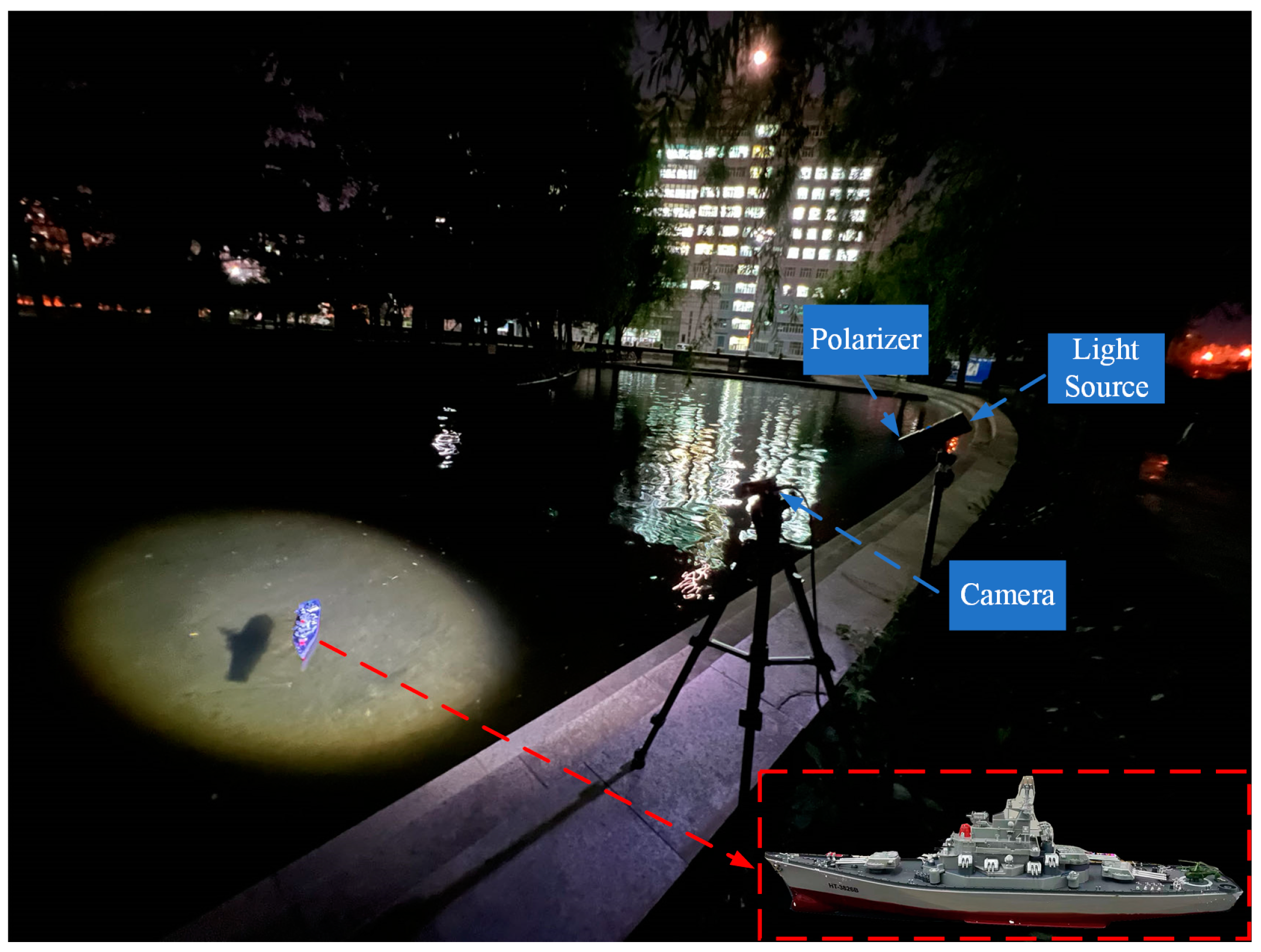
4.1. Experimental Design for Moving Target Detection
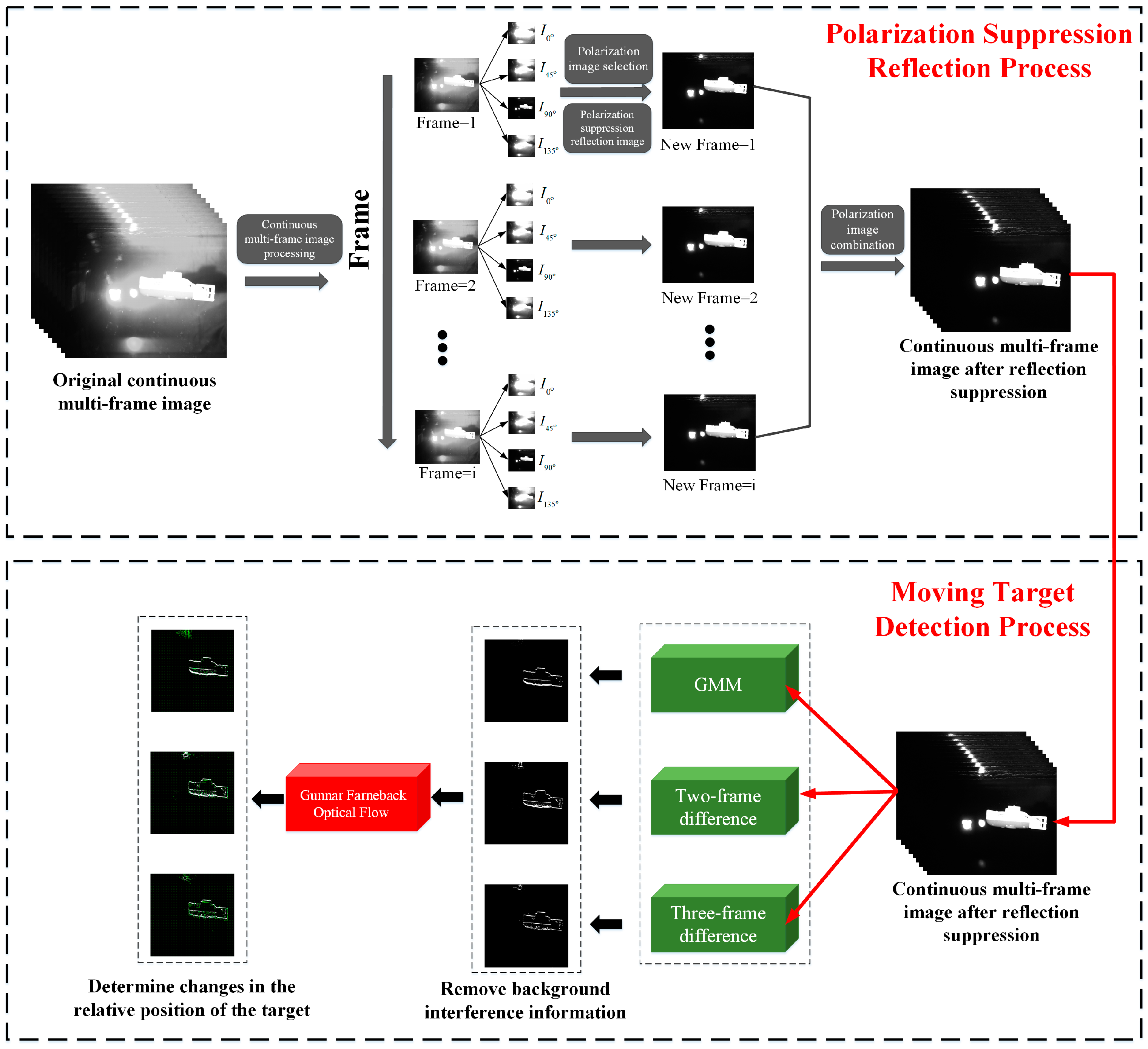
4.2. Moving Target Detection Algorithm
4.3. Experiments and Analysis of Results
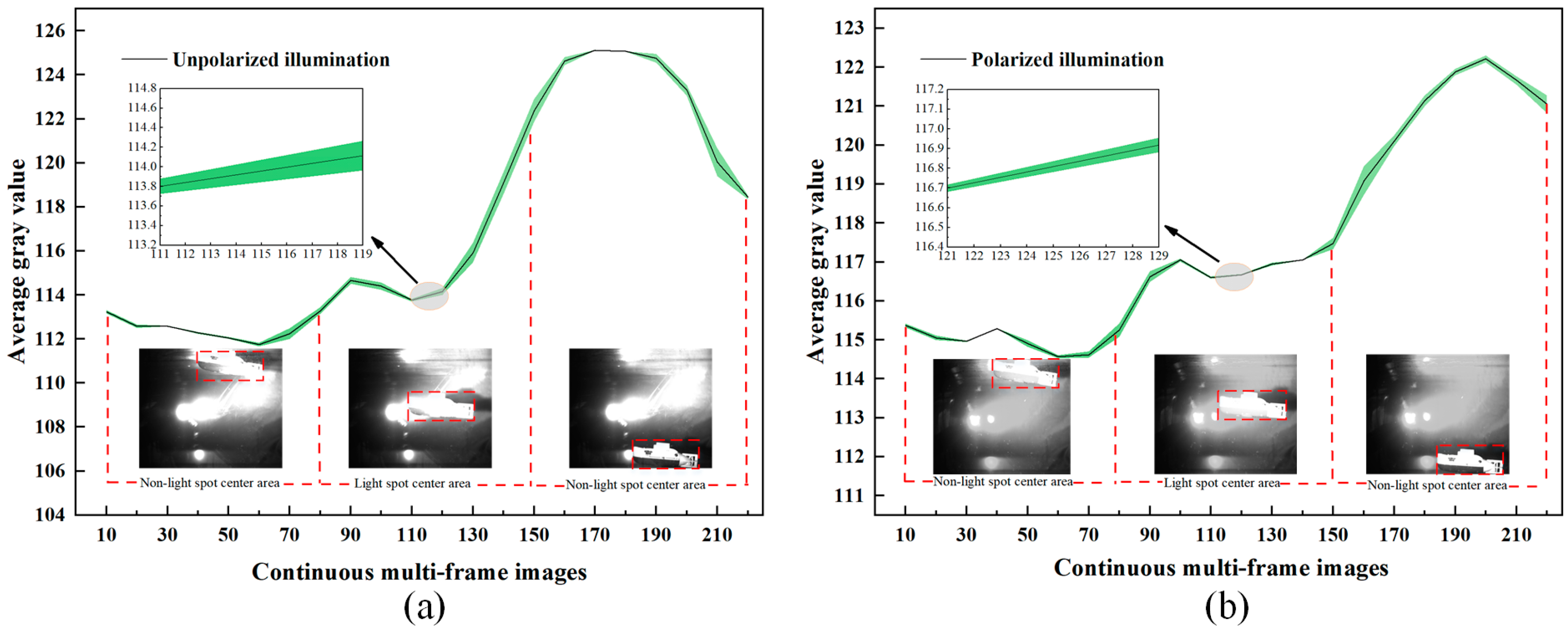
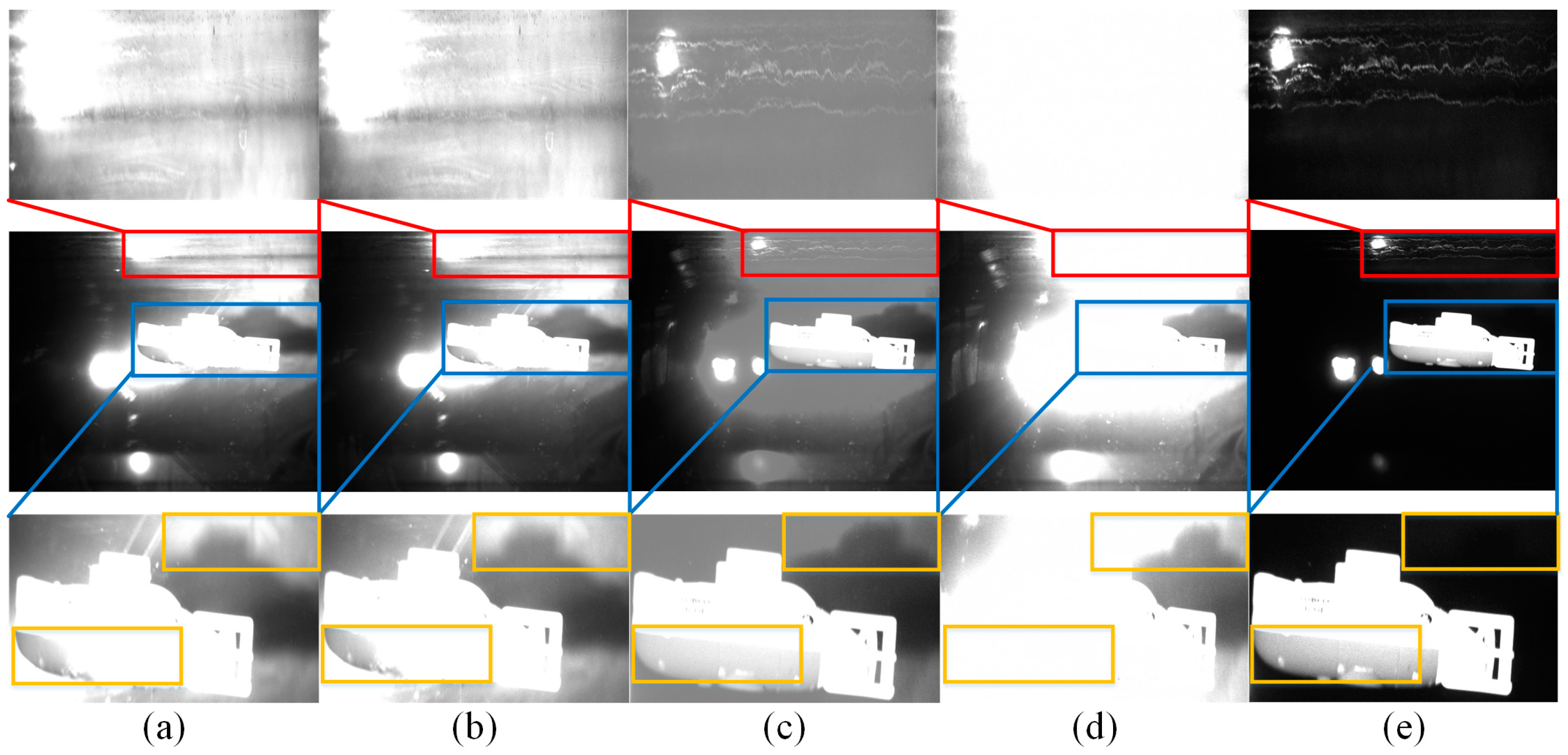
4.3.1. Experimental Analysis of Polarization Reflection Suppression
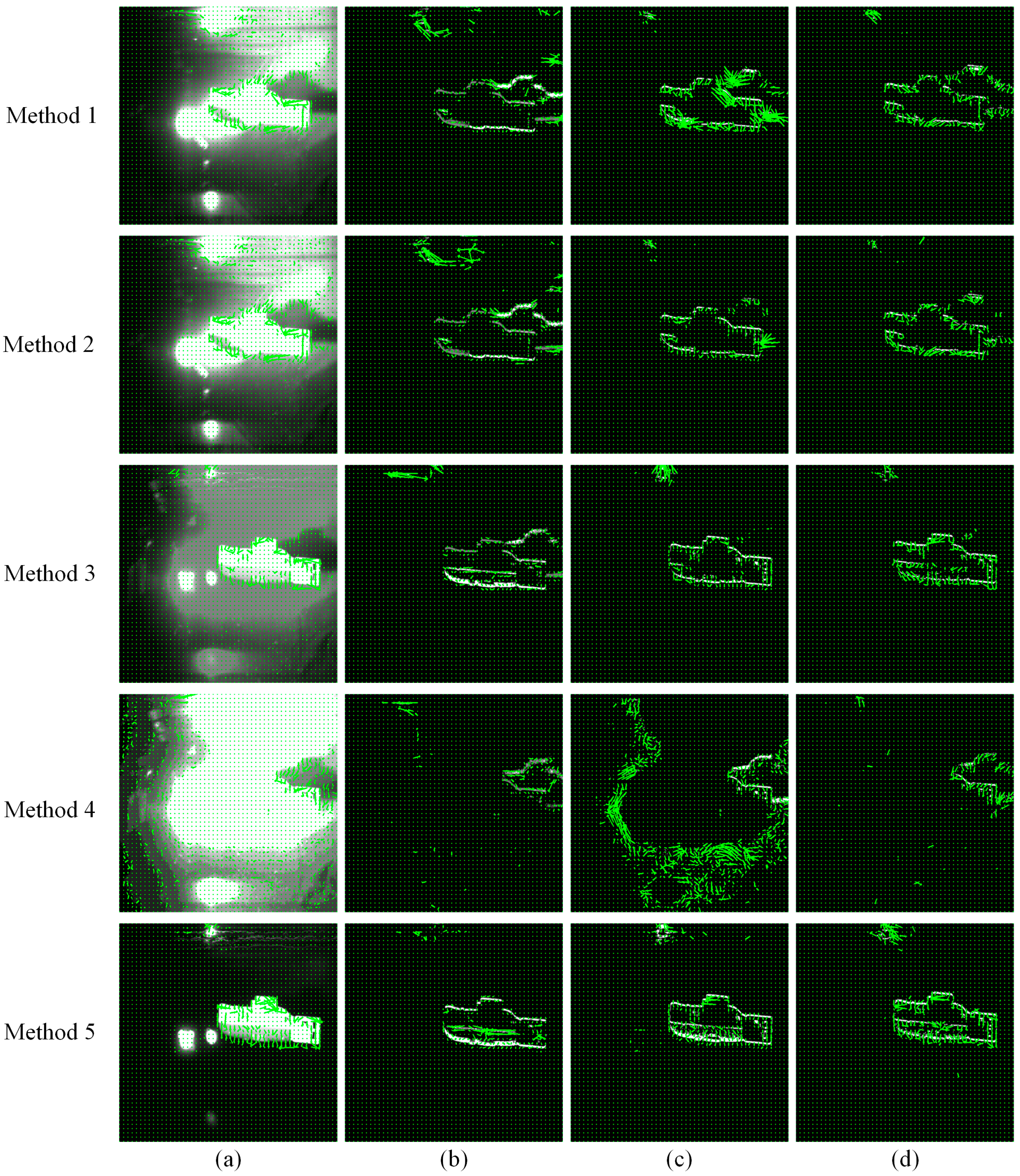
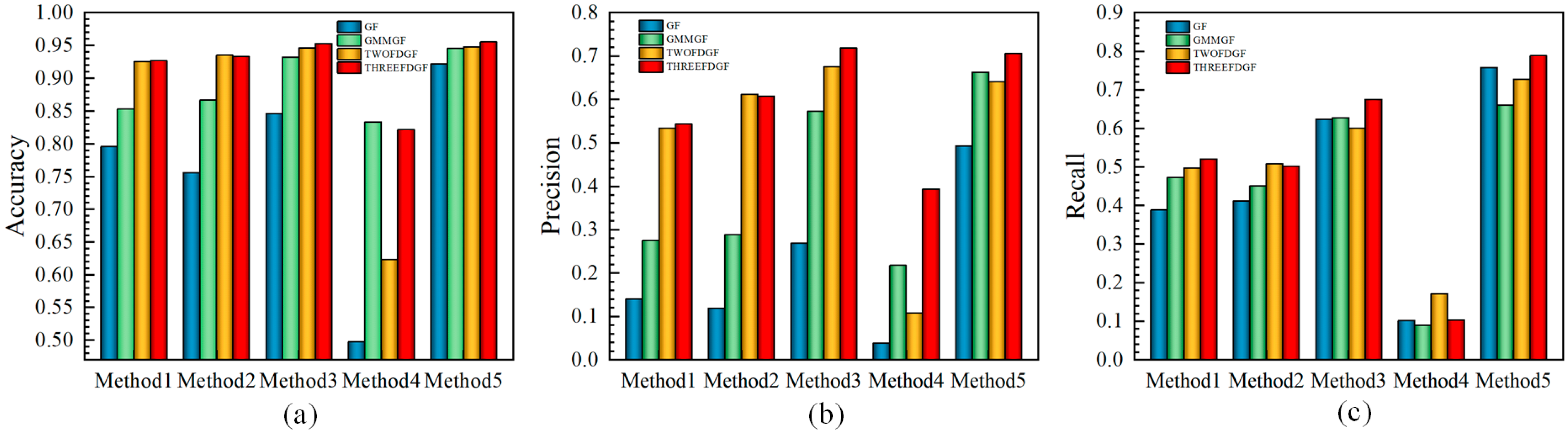
4.3.2. Moving Target Detection Experiment
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, Y.; Fu, Q.; Luo, K.; Yang, W.; Zhan, J.; Zhang, S.; Shi, H.; Li, Y.; Yu, H. Analysis of Two-Color Infrared Polarization Imaging Characteristics for Target Detection and Recognition. Photonics 2023, 10, 1181. [Google Scholar] [CrossRef]
- Guan, J.; Cheng, Y.; Chang, G. Time-domain polarization difference imaging of objects in turbid water. Opt. Commun. 2017, 391, 82–87. [Google Scholar] [CrossRef]
- Zhu, Z.; Li, X.; Zhang, J.; Zhou, Y.; Zhao, Y. Specular flare suppression method for reflective materials based on the optimal polarizing angle. Appl. Opt. 2022, 61, 8034–8041. [Google Scholar] [CrossRef] [PubMed]
- Liang, J.; Wang, X.; He, S.; Jin, W. Sea Surface Clutter Suppression Method Based on Time-domain Polarization Characteristics of Sun Glint. Opt. Express 2019, 27, 2142–2158. [Google Scholar] [CrossRef] [PubMed]
- Zhan, Y.; Hu, D.; Liu, K. Adaptive Structured Light for High-Reflective Areas. Acta Opt. Sin. 2022, 42, 115–123. [Google Scholar]
- Deng, J.; Zhu, J.; Li, H.; Liu, X.; Guo, F.; Zhang, X.; Hou, X. Underwater dynamic polarization imaging without dependence on the background region. Opt. Express 2024, 32, 5397–5409. [Google Scholar] [CrossRef] [PubMed]
- Yang, L.; Liang, J.; Zhang, W.; Ju, H.; Ren, L.; Shao, X. Underwater polarimetric imaging for visibility enhancement utilizing active unpolarized illumination. Opt. Commun. 2019, 438, 96–101. [Google Scholar] [CrossRef]
- Zhang, Y.; Shi, Z.; Qiu, T. Infrared small target detection method based on decomposition of polarization information. J. Electron. Imaging 2017, 26, 033004. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, Y.; Shi, Z.; Li, B.; Zhang, Y.; Ling, F.; Zhang, Y.; Liu, D. Suppression Technology for Saturated Water Surface Glint Based on Polarization Characteristics. Acta Opt. Sin. 2022, 42, 81–90. [Google Scholar]
- Li, S.; Jiao, J.; Wang, C. Specular Reflection Removal Method Based on Polarization Spectrum Fusion and Its Application in Vegetation Health Monitoring. Spectrosc. Spect. Anal. 2023, 43, 3607–3614. [Google Scholar]
- Yang, M.; Xu, W.; Tian, Y.; Sun, Z.; Sun, X. Time-Sharing Infrared Polarization Imaging System for Moving Target Detection. Acta Opt. Sin. 2020, 40, 70–77. [Google Scholar]
- Zhu, H.; Qu, H. Adaptive Suppression System of Sea Background Flare. Acta Opt. Sin. 2022, 42, 110–118. [Google Scholar]
- Ye, S.; Qu, W.; Li, S.; Wang, J. Sea Surface Glint-Suppression Method Based on the Polarization Time-Domain Characteristics. Acta Opt. Sin. 2021, 41, 26–32. [Google Scholar]
- Ren, K.; Lv, Y.; Gu, G.; Chen, Q. Calculation method of multiangle polarization measurement for oil spill detection. Appl. Opt. 2019, 58, 3317–3324. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; Ji, Z.; Zhang, Y.; Sun, X.; Song, P.; Li, Y. Mid-infrared imaging system based on polarizers for detecting marine targets covered in sun glint. Opt. Express 2016, 24, 16396–16409. [Google Scholar] [CrossRef] [PubMed]
- Soni, J.; Purwar, H.; Ghosh, N. Quantitative polarimetry of plasmon resonant spheroidal metal nanoparticles: A Mueller matrix decomposition study. Opt. Commun. 2012, 285, 1599–1607. [Google Scholar] [CrossRef]
- Lu, S.; Chipman, R. Interpretation of Mueller matrices based on polar decomposition. J. Opt. Soc. Am. A 1996, 13, 1106–1113. [Google Scholar] [CrossRef]
- Swami, M.; Manhas, S.; Buddhiwant, P.; Ghosh, N.; Uppal, A.; Gupta, P. Polar decomposition of 3 × 3 Mueller matrix: A tool for quantitative tissue polarimetry. Opt. Express 2006, 14, 9324–9337. [Google Scholar] [CrossRef] [PubMed]
- Liu, F.; Zhang, S.; Han, P.; Chen, F.; Zhao, L.; Fan, Y.; Shao, X. Depolarization index from Mueller matrix descatters imaging in turbid water. Chin. Opt. Lett. 2022, 20, 022601. [Google Scholar] [CrossRef]
- Feng, F.; Wu, G.; Wu, Y.; Miao, Y.; Liu, B. Algorithm for Underwater Polarization Imaging Based on Global Estimation. Acta Opt. Sin. 2020, 40, 75–83. [Google Scholar]
- Xu, J.; Zhao, J.; Li, X.; Liu, H.; Liu, T.; Zhai, J.; Hu, H. Polarization Imaging in Turbid Water Based on Spectral Information. Acta Opt. Sin. 2023, 43, 269–277. [Google Scholar]
- Wang, J.; Duan, J.; Fu, Q.; Xie, G.; Mo, S.; Fang, R. Polarization Suppression Reflection Method Based on Mueller Matrix. Acta Opt. Sin. 2023, 43, 162–174. [Google Scholar]
- Cucchiara, R.; Piccardi, M.; Prati, A. Detecting moving objects, ghosts, and shadows in video streams. IEEE T. Pattern Anal. 2003, 25, 12–15. [Google Scholar] [CrossRef]
- Tsai, D.; Lai, S. Independent component analysis-based background subtraction for indoor surveillance. IEEE T. Image Process. 2009, 18, 158–167. [Google Scholar] [CrossRef] [PubMed]
- Lv, J.; Ji, H.; Jiang, Y.; Wang, B. A New Flow Pattern Identification Method for Gas-Liquid Two-Phase Flow in Small Channel Based on an Improved Optical Flow Algorithm. IEEE Sens. J. 2024, 23, 27634–27644. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Lv, H. An optical flow estimation method based on multiscale anisotropic convolution. APPL. INTELL. 2024, 54, 398–413. [Google Scholar] [CrossRef]
- Wang, C.; Wang, T.; Wang, E.; Sun, E.; Luo, Z. Flying Small Target Detection for Anti-UAV Based on a Gaussian Mixture Model in a Compressive Sensing Domain. Sensors 2019, 19, 2168. [Google Scholar] [CrossRef]
- Farneback, G. Two-Frame Motion Estimation Based on Polynomial Expansion. In Proceedings of the Image Analysis: 13th Scandinavian Conference, Halmstad, Sweden, 29 June–2 July 2003. [Google Scholar]
- Kwan, C.; Larkin, J. Detection of Small Moving Objects in Long Range Infrared Videos from a Change Detection Perspective. Photonics 2021, 8, 394. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, J.; Wang, J.; Fu, Q.; Xie, G.; Mo, S.; Fang, R. Polarization-Based Reflection Suppression Method and Its Application to Target Detection. Photonics 2024, 11, 445. https://doi.org/10.3390/photonics11050445
Duan J, Wang J, Fu Q, Xie G, Mo S, Fang R. Polarization-Based Reflection Suppression Method and Its Application to Target Detection. Photonics. 2024; 11(5):445. https://doi.org/10.3390/photonics11050445
Chicago/Turabian StyleDuan, Jin, Jialin Wang, Qiang Fu, Guofang Xie, Suxin Mo, and Ruisen Fang. 2024. "Polarization-Based Reflection Suppression Method and Its Application to Target Detection" Photonics 11, no. 5: 445. https://doi.org/10.3390/photonics11050445
APA StyleDuan, J., Wang, J., Fu, Q., Xie, G., Mo, S., & Fang, R. (2024). Polarization-Based Reflection Suppression Method and Its Application to Target Detection. Photonics, 11(5), 445. https://doi.org/10.3390/photonics11050445