Laser Remote Sensing of Seismic Wave with Sub-Millimeter Scale Amplitude Based on Doppler Characteristics Extracted from Wavefront Sensor


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
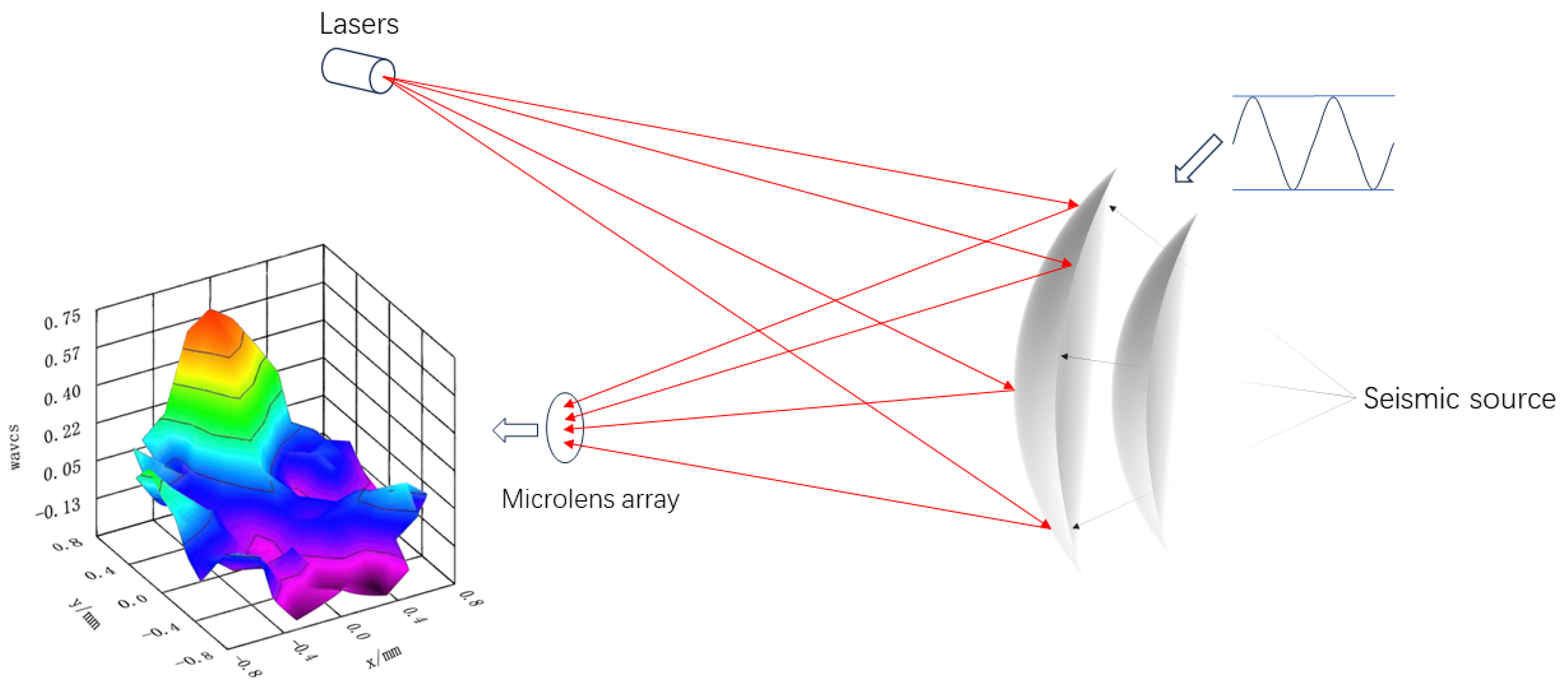
2. Seismic Wave Laser Remote Sensing Detection System and Working Mechanism
3. Theoretical Analysis of Seismic Wave Laser Remote Sensing Detection System
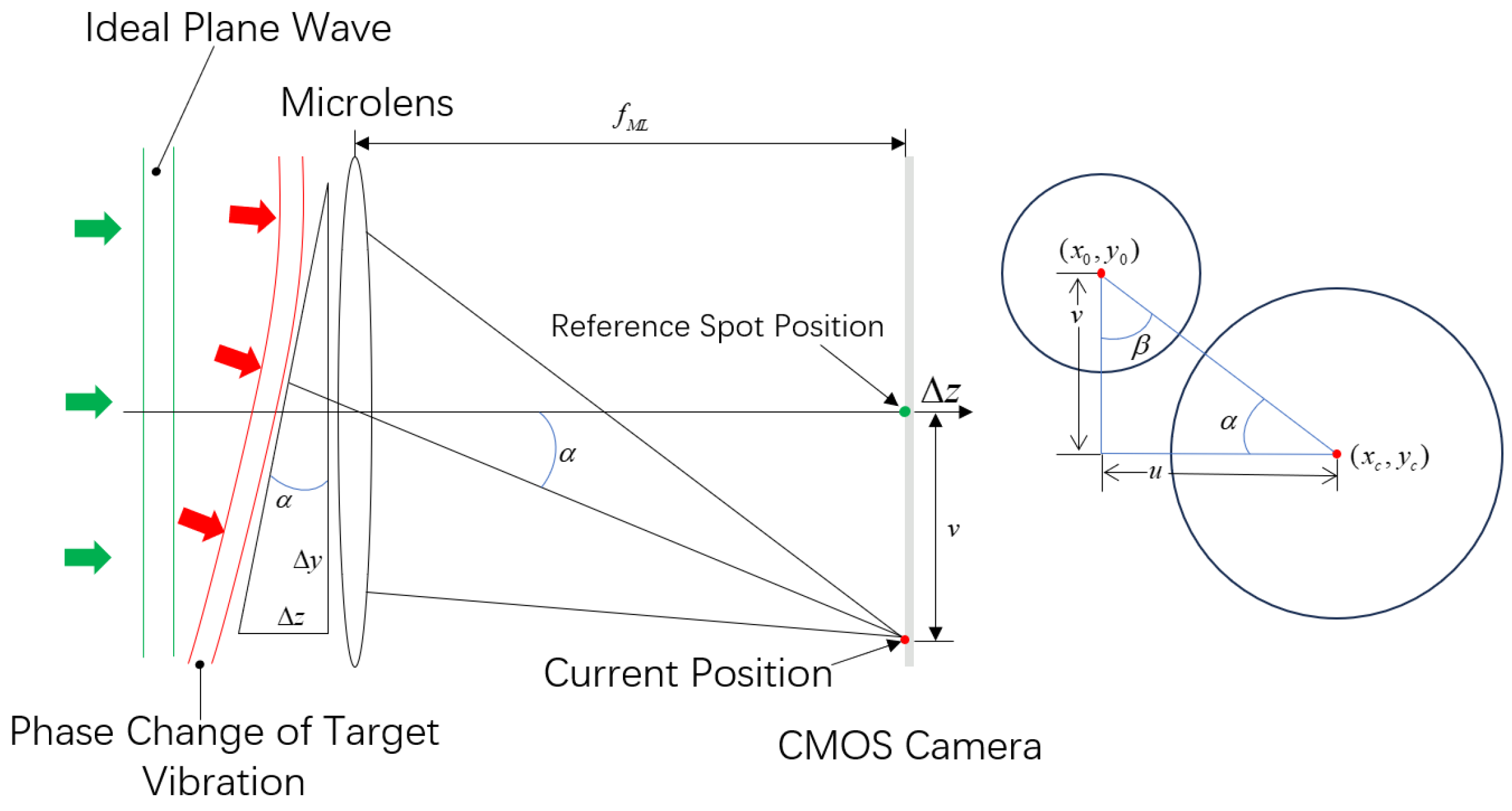
3.1. Wavefront Sensor Phase
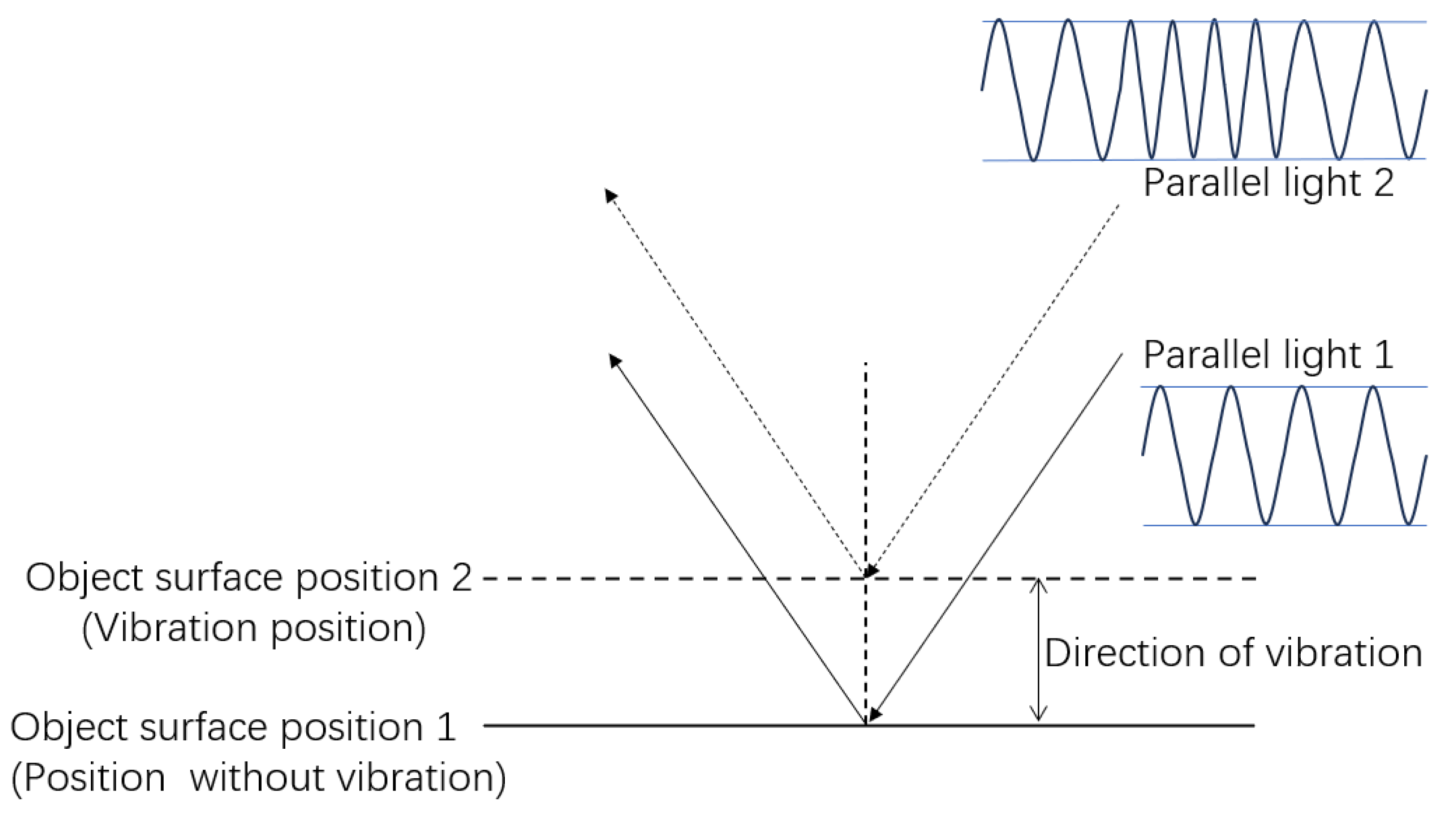
3.2. Laser Echo Signal Doppler Effect
3.3. Laser Echo Signal Aliasing Noise
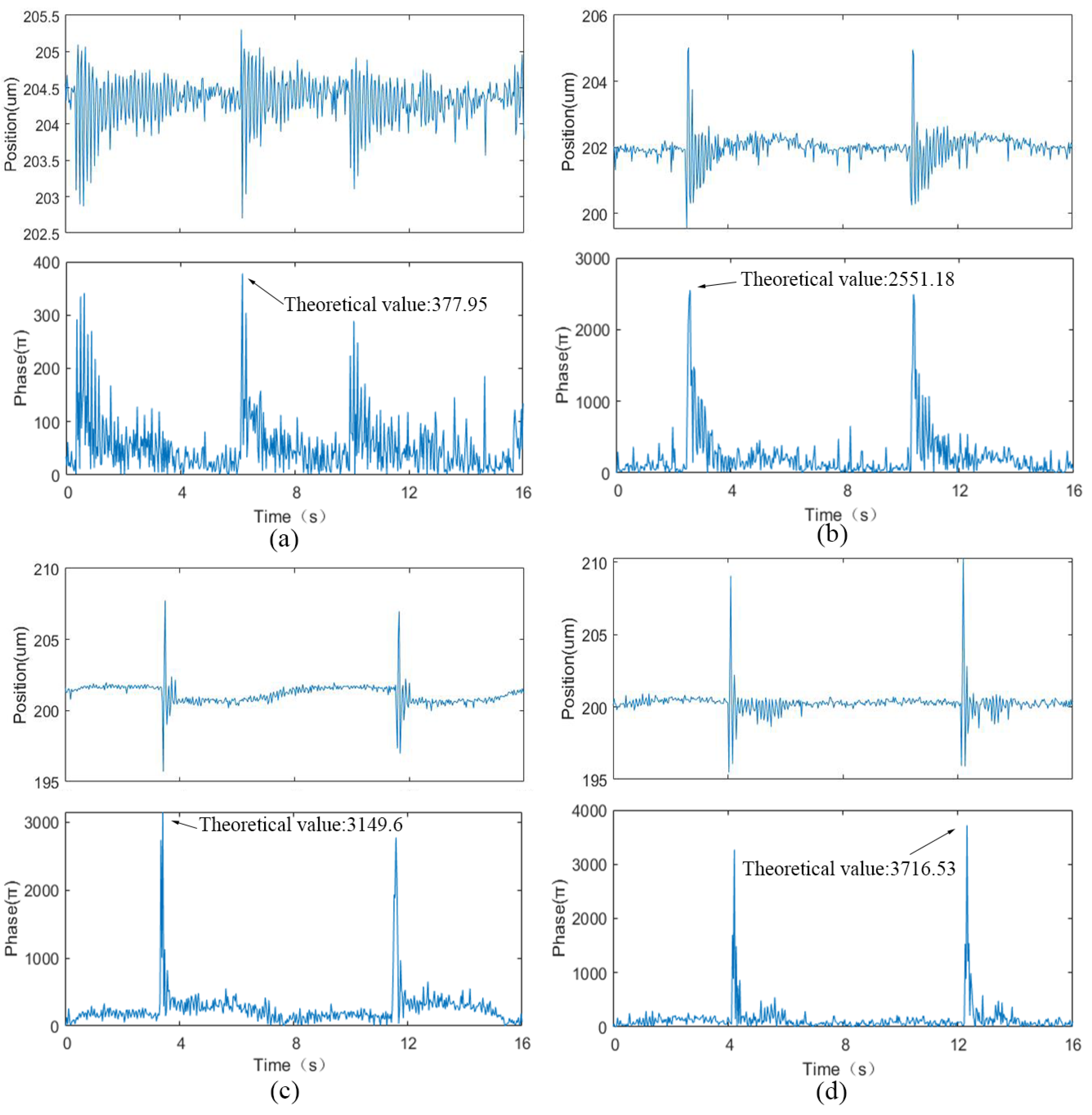
4. Experiment and Result Analysis of Seismic Wave Laser Remote Sensing Detection System
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

References
- Papadopoulou, M.; Da Col, F.; Mi, B.; Bäckström, E.; Marsden, P.; Brodic, B.; Malehmir, A.; Socco, L.V. Surface-wave analysis for static corrections in mineral exploration: A case study from central Sweden. Geophys. Prospect. 2020, 68, 214–231. [Google Scholar] [CrossRef]
- Scott, W.R.; Martin, J.S.; Larison, G.D. Experimental model for a seismic landmine detection system. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1155–1164. [Google Scholar] [CrossRef]
- Polychronopoulou, K.; Lois, A.; Draganov, D. Body-wave passive seismic interferometry revisited: Mining exploration using the body waves of local microearthquakes. Geophys. Prospect. 2020, 68, 232–253. [Google Scholar] [CrossRef]
- Czarny, R.; Pilecki, Z.; Nakata, N.; Pilecka, E.; Krawiec, K.; Harba, P.; Barnaś, M. 3D S-wave velocity imaging of a subsurface disturbed by mining using ambient seismic noise. Eng. Geol. 2019, 251, 115–127. [Google Scholar] [CrossRef]
- Wu, C.; Li, X.; Chen, W.; Li, X. A review of geological applications of high-spatial-resolution remote sensing data. J. Circuits Syst. Comput. 2020, 29, 2030006. [Google Scholar] [CrossRef]
- Wu, Z.; Duan, N.; Wang, C.; Li, J.; Zhu, J. Experimental study on acoustic-to-seismic landmine detection based on laser self-mixing interferometer. In Proceedings of the Sixth International Conference on Optical and Photonic Engineering (icOPEN 2018), Shanghai, China, 24 July 2018; Volume 10827, pp. 424–429. [Google Scholar] [CrossRef]
- Shroll, R.M.; Peter, B.S.; Richtsmeier, S.; Tannian, B.; Jensen, E.; Kielkopf, J.; Pereira, W.E. Remote optical detection of ground vibrations. In Proceedings of the Infrared Remote Sensing and Instrumentation XXIII, San Diego, CA, USA, 1 September 2015; Volume 9608, pp. 168–183. [Google Scholar] [CrossRef]
- Bruce, R.A.; Fitzpatrick, G.L. Remote vibration measurement of rough surfaces by laser interferometry. Appl. Opt. 1975, 14, 1621–1626. [Google Scholar] [CrossRef]
- Yan, B.; Shi, H.; Wang, P.; Tong, Q.; Su, J. Optoelectric characteristics of laser remote sensing for measurement of ground vibration. J. Appl. Remote Sens. 2021, 15, 014505. [Google Scholar] [CrossRef]
- Bianchi, S. Vibration detection by observation of speckle patterns. Appl. Opt. 2014, 53, 931–936. [Google Scholar] [CrossRef]
- Zinke, R.; Hollingsworth, J.; Dolan, J.F.; Van Dissen, R. Three-dimensional surface deformation in the 2016 MW 7.8 Kaikōura, New Zealand, earthquake from optical image correlation: Implications for strain localization and long-term evolution of the Pacific-Australian plate boundary. Geochem. Geophys. Geosyst. 2019, 20, 1609–1628. [Google Scholar] [CrossRef]
- He, P.; Wen, Y.; Xu, C.; Chen, Y. Complete three-dimensional near-field surface displacements from imaging geodesy techniques applied to the 2016 Kumamoto earthquake. Remote Sens. Environ. 2019, 232, 111321. [Google Scholar] [CrossRef]
- She, J.; Mabi, A.; Liu, Z.; Sheng, M.; Dong, X.; Liu, F.; Wang, S. Analysis Using High-Precision Airborne LiDAR Data to Survey Potential Collapse Geological Hazards. Adv. Civ. Eng. 2021, 2021, 6475942. [Google Scholar] [CrossRef]
- Scott, C.; Bunds, M.; Shirzaei, M.; Toke, N. Creep along the Central San Andreas Fault from surface fractures, topographic differencing, and InSAR. J. Geophys. Res. Solid Earth 2020, 125, e2020JB019762. [Google Scholar] [CrossRef]
- Pastor, J.L.; Tomás, R.; Lettieri, L.; Riquelme, A.; Cano, M.; Infante, D.; Ramondini, M.; Di Martire, D. Multi-Source data integration to investigate a deep-seated landslide affecting a bridge. Remote Sens. 2019, 11, 1878. [Google Scholar] [CrossRef]
- Yu, H.; Mohammed, M.A.; Mohammadi, M.E.; Moaveni, B.; Barbosa, A.R.; Stavridis, A.; Wood, R.L. Structural identification of an 18-story RC building in Nepal using post-earthquake ambient vibration and lidar data. Front. Built Environ. 2017, 3, 11. [Google Scholar] [CrossRef]
- Wang, B.C. A landslide monitoring technique based on dual-receiver and phase difference measurements. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1209–1213. [Google Scholar] [CrossRef]
- Hill, C.A.; Harris, M.; Ridley, K.D. Fiber-based 1.5 μm lidar vibrometer in pulsed and continuous modes. Appl. Opt. 2007, 46, 4376–4385. [Google Scholar] [CrossRef]
- Guinau, M.; Tapia, M.; Pérez-Guillén, C.; Suriñach, E.; Roig, P.; Khazaradze, G.; Torné, M.; Royán, M.J.; Echeverria, A. Remote sensing and seismic data integration for the characterization of a rock slide and an artificially triggered rock fall. Eng. Geol. 2019, 257, 105113. [Google Scholar] [CrossRef]
- Paziewski, J.; Kurpinski, G.; Wielgosz, P.; Stolecki, L.; Sieradzki, R.; Seta, M.; Oszczak, S.; Castillo, M.; Martin-Porqueras, F. Towards Galileo+ GPS seismology: Validation of high-rate GNSS-based system for seismic events characterisation. Measurement 2020, 166, 108236. [Google Scholar] [CrossRef]
- Brissaud, Q.; Krishnamoorthy, S.; Jackson, J.M.; Bowman, D.C.; Komjathy, A.; Cutts, J.A.; Zhan, Z.; Pauken, M.T.; Izraelevitz, J.S.; Walsh, G.J. The first detection of an earthquake from a balloon using its acoustic signature. Geophys. Res. Lett. 2021, 48, e2021GL093013. [Google Scholar] [CrossRef]
- Garcia, R.F.; Klotz, A.; Hertzog, A.; Martin, R.; Gérier, S.; Kassarian, E.; Bordereau, J.; Venel, S.; Mimoun, D. Infrasound from large earthquakes recorded on a network of balloons in the stratosphere. Geophys. Res. Lett. 2022, 49, e2022GL098844. [Google Scholar] [CrossRef]
- Primot, J. Theoretical description of Shack–Hartmann wave-front sensor. Opt. Commun. 2003, 222, 81–92. [Google Scholar] [CrossRef]
- Li, X.; Zhao, L.; Fang, Z.; Asundi, A.; Yin, X. Surface measurement with Shack-Hartmann wavefront sensing technology. In Proceedings of the Ninth International Symposium on Laser Metrology, Singapore, 3 October 2008; Volume 7155, pp. 387–395. [Google Scholar] [CrossRef]
- Yi, S.; Xiang, J.; Zhou, M.; Wu, Z.; Yang, L.; Yu, Z. Angle-based wavefront sensing enabled by the near fields of flat optics. Nat. Commun. 2021, 12, 6002. [Google Scholar] [CrossRef]
- Riley, Z.B.; Hagen, B.; Ehrhardt, D.A. Aero-optical measurements of the response of a thin panel at mach 6. AIAA J. 2022, 60, 1522–1536. [Google Scholar] [CrossRef]
- Ares, J.; Mancebo, T.; Bara, S. Position and displacement sensing with Shack–Hartmann wave-front sensors. Appl. Opt. 2000, 39, 1511–1520. [Google Scholar] [CrossRef]
- Shi, H.; Wang, P.; Su, J. A Remote Sensing Study of Wavefront-Sensor-Based Measurements of Seismic Wave. Appl. Laser 2023, 43, 111–117. [Google Scholar]
- Roddier, F.J. Variations on a Hartmann theme. Opt. Eng. 1990, 29, 1239–1242. [Google Scholar] [CrossRef]
- van Dam, M.A.; Lane, R.G. Wave-front sensing from defocused images by use of wave-front slopes. Appl. Opt. 2002, 41, 5497–5502. [Google Scholar] [CrossRef]
- Claus, D.; Pedrini, G.; Osten, W. Iterative phase retrieval based on variable wavefront curvature. Appl. Opt. 2017, 56, F134–F137. [Google Scholar] [CrossRef] [PubMed]
- Kong, F.; Lambert, A.; Joubert, D.; Cohen, G. Shack-Hartmann wavefront sensing using spatial-temporal data from an event-based image sensor. Opt. Express 2020, 28, 36159–36175. [Google Scholar] [CrossRef] [PubMed]
- Noll, R.J. Zernike polynomials and atmospheric turbulence. JOSA 1976, 66, 207–211. [Google Scholar] [CrossRef]
- Nirmaier, T.; Pudasaini, G.; Bille, J. Very fast wave-front measurements at the human eye with a custom CMOS-based Hartmann-Shack sensor. Opt. Express 2003, 11, 2704–2716. [Google Scholar] [CrossRef]
- Roddier, N.A. Atmospheric wavefront simulation using Zernike polynomials. Opt. Eng. 1990, 29, 1174–1180. [Google Scholar] [CrossRef]
- Rodríguez-Ramos, J.M.; Marichal-Hernández, J.G.; Rosa, F. Modal Fourier wavefront reconstruction using graphics processing units. In Proceedings of the Advances in Adaptive Optics II, Orlando, FL, USA, 27 June 2006; Volume 6272, pp. 368–378. [Google Scholar] [CrossRef]
- Mochi, I.; Goldberg, K.A. Modal wavefront reconstruction from its gradient. Appl. Opt. 2015, 54, 3780–3785. [Google Scholar] [CrossRef]
- Schulze, C.; Naidoo, D.; Flamm, D.; Schmidt, O.A.; Forbes, A.; Duparré, M. Wavefront reconstruction by modal decomposition. Opt. Express 2012, 20, 19714–19725. [Google Scholar] [CrossRef]
- Li, M.; Li, D.; Zhang, C.; Kewei, E.; Wang, Q.; Chen, H. Modal wavefront reconstruction from slope measurements for rectangular apertures. JOSA A 2015, 32, 1916–1921. [Google Scholar] [CrossRef]
- Neal, D.R.; Alford, W.J.; Gruetzner, J.K.; Warren, M.E. Amplitude and phase beam characterization using a two-dimensional wavefront sensor. In Proceedings of the Third International Workshop on Laser Beam and Optics Characterization, Quebec City, QC, Canada, 20 November 1996; Volume 2870, pp. 72–82. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, Q.; Luo, H.; Wu, G.; Ji, X.; Su, J.; Jiang, W. Laser Remote Sensing of Seismic Wave with Sub-Millimeter Scale Amplitude Based on Doppler Characteristics Extracted from Wavefront Sensor. Photonics 2024, 11, 204. https://doi.org/10.3390/photonics11030204
Luo Q, Luo H, Wu G, Ji X, Su J, Jiang W. Laser Remote Sensing of Seismic Wave with Sub-Millimeter Scale Amplitude Based on Doppler Characteristics Extracted from Wavefront Sensor. Photonics. 2024; 11(3):204. https://doi.org/10.3390/photonics11030204
Chicago/Turabian StyleLuo, Quan, Hongsheng Luo, Guihan Wu, Xiang Ji, Jinshan Su, and Wei Jiang. 2024. "Laser Remote Sensing of Seismic Wave with Sub-Millimeter Scale Amplitude Based on Doppler Characteristics Extracted from Wavefront Sensor" Photonics 11, no. 3: 204. https://doi.org/10.3390/photonics11030204
APA StyleLuo, Q., Luo, H., Wu, G., Ji, X., Su, J., & Jiang, W. (2024). Laser Remote Sensing of Seismic Wave with Sub-Millimeter Scale Amplitude Based on Doppler Characteristics Extracted from Wavefront Sensor. Photonics, 11(3), 204. https://doi.org/10.3390/photonics11030204