Target Recognition Based on Singular Value Decomposition in a Single-Pixel Non-Imaging System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methods
- (1)
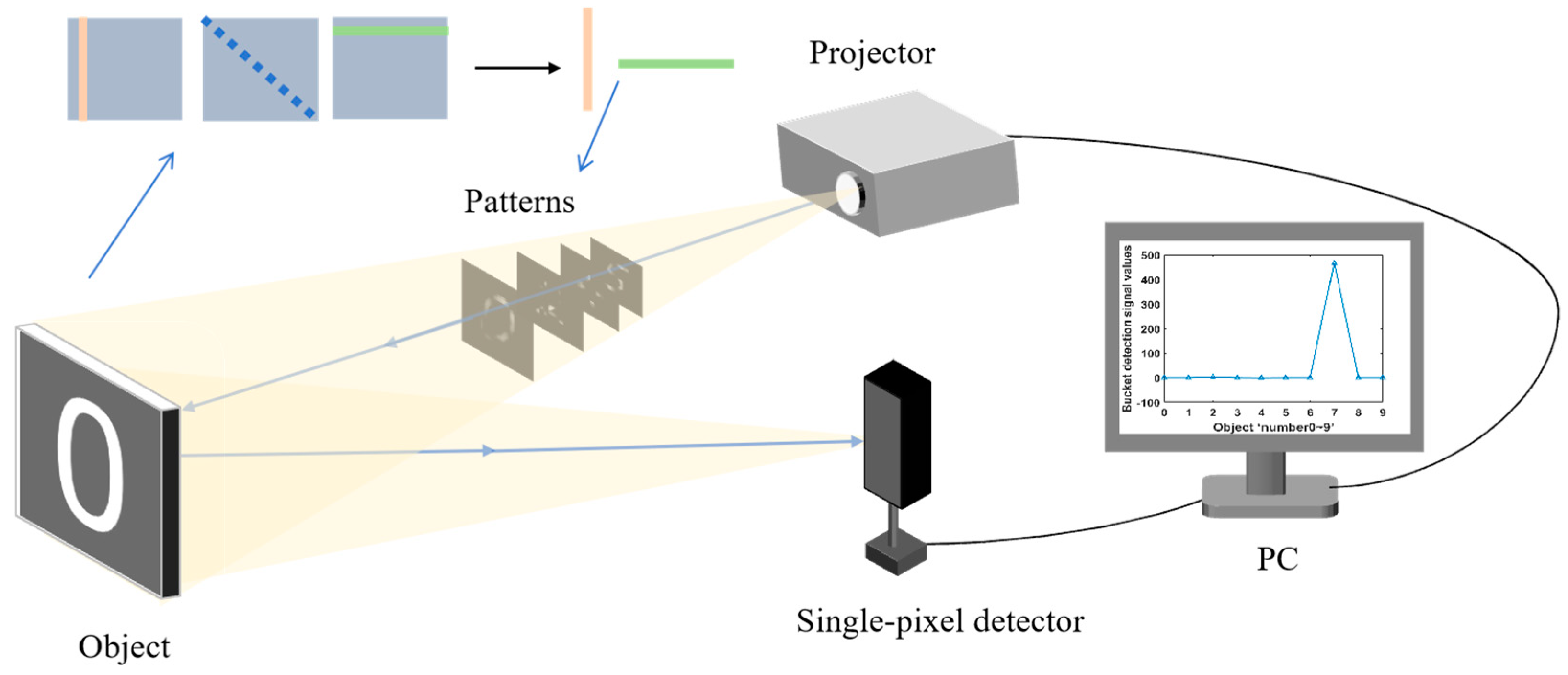
- According to Cauchy–Schwarz inequality, for any two vectors and , if and only if there is for some , the Formula (5) is equal. This corresponds to the single-pixel imaging system described in Equation (3), where greater similarity between the projected speckle patterns and the target object’s characteristics leads to higher reflected light signal intensity .
- (2)
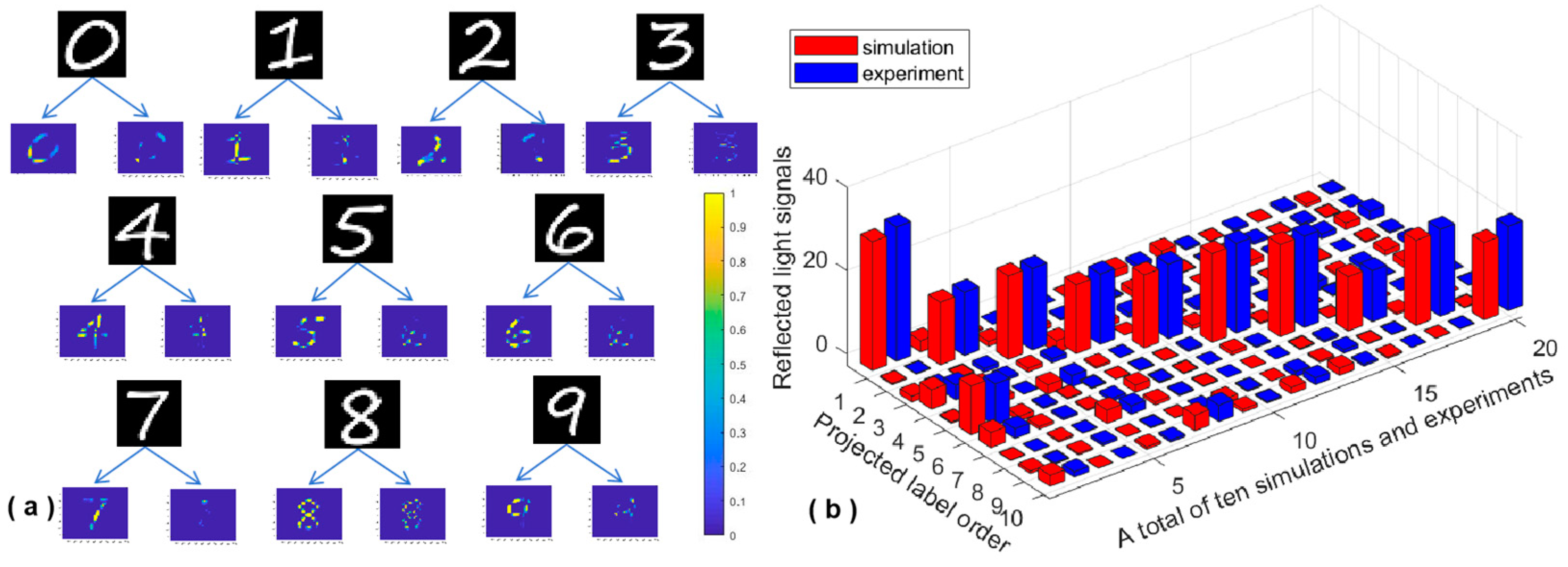
- Singular value decomposition (SVD) was employed to process the preprocessed two-dimensional information of the target object, as illustrated in Figure 2.
3. Simulation and Experimental Results
3.1. Simulation and Result
3.2. Experimental Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gatti, A.; Brambilla, E.; Bache, M.; Lugiato, L.A. Ghost imaging with thermal light: Comparing entanglement and classical correlation. Phys. Rev. Lett. 2004, 93, 093602. [Google Scholar] [CrossRef] [PubMed]
- Duarte, M.F.; Davenport, M.A.; Takhar, D.; Laska, J.N.; Sun, T.; Kelly, K.F.; Baraniuk, R.G. Single-pixel imaging via compressive sampling. IEEE Signal Process. Mag. 2008, 25, 83–91. [Google Scholar] [CrossRef]
- Edgar, M.P.; Gibson, G.M.; Padgett, M.J. Principles and prospects for single-pixel imaging. Nat. Photonics 2019, 13, 13–20. [Google Scholar] [CrossRef]
- Kang, Z.; Ma, L.; Kang, Y.; Yao, Y.; Zhang, T. Experiments of ghost imaging with pseudo-thermal light for remote sensing applications. In Proceedings of the AOPC 2015: Optical and Optoelectronic Sensing and Imaging Technology, Beijing, China, 5–7 May 2015; Volume 9674, pp. 658–666. [Google Scholar]
- Lu, X.; Zheng, X.; Yuan, Y. Remote sensing scene classification by unsupervised representation learning. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5148–5157. [Google Scholar] [CrossRef]
- Sun, M.J.; Zhang, J.M. Single-pixel imaging and its application in three-dimensional reconstruction: A brief review. Sensors 2019, 19, 732. [Google Scholar] [CrossRef]
- Osorio Quero, C.A.; Durini, D.; Rangel-Magdaleno, J.; Martinez-Carranza, J. Single-pixel imaging: An overview of different methods to be used for 3D space reconstruction in harsh environments. Rev. Sci. Instrum. 2021, 92, 111501. [Google Scholar] [CrossRef] [PubMed]
- Jiao, S.; Zhou, C.; Shi, Y.; Zou, W.; Li, X. Review on optical image hiding and watermarking techniques. Opt. Laser Technol. 2019, 109, 370–380. [Google Scholar] [CrossRef]
- Sui, L.; Wang, J.; Tian, A.; Asundi, A. Optical image hiding under framework of computational ghost imaging based on an expansion strategy. Opt. Express 2019, 27, 7213–7225. [Google Scholar]
- Ren, H.; Zhao, S.; Gruska, J. Edge detection based on single-pixel imaging. Opt. Express 2018, 26, 5501–5511. [Google Scholar] [CrossRef]
- Feng, J.; Jiao, S.; Gao, Y.; Lei, T.; Du, L. Design of optimal illumination patterns in single-pixel imaging using image dictionaries. IEEE Photonics J. 2020, 12, 1–9. [Google Scholar] [CrossRef]
- Latorre-Carmona, P.; Traver, V.J.; Sánchez, J.S.; Tajahuerce, E. Online reconstruction-free single-pixel image classification. Image Vis. Comput. 2019, 86, 28–37. [Google Scholar] [CrossRef]
- Zou, X.; Huang, X.; Liu, C.; Tan, W.; Bai, Y.; Fu, X. Target recognition based on pre-processing in computational ghost imaging with deep learning. Opt. Laser Technol. 2023, 167, 109807. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, X.; Zheng, S.; Yao, M.; Zheng, G.; Zhong, J. Image-free classification of fast-moving objects using “learned” structured illumination and single-pixel detection. Opt. Express 2020, 28, 13269–13278. [Google Scholar] [CrossRef] [PubMed]
- Gilbert, A.J.; Miller, B.W.; Robinson, S.M.; White, T.A.; Pitts, W.K.; Jarman, K.D.; Seifert, A. A single-pixel X-ray imager concept and its application to secure radiographic inspections. Nucl. Instrum. Methods A 2017, 861, 90–97. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, X.; Zheng, G.; Zhong, J. Hadamard single-pixel imaging versus Fourier single-pixel imaging. Opt. Express 2017, 25, 19619–19639. [Google Scholar] [CrossRef]
- Liu, Y.; Suo, J.; Zhang, Y.; Dai, Q. Single-pixel phase and fluorescence microscope. Opt. Express 2018, 26, 32451–32462. [Google Scholar] [CrossRef]
- Ma, M.; Sun, Q.; Gao, X.; Wang, G.; Deng, H.; Zhang, Y.; Zhong, X. High-efficiency single-pixel imaging using discrete Hartley transform. AIP Adv. 2021, 11, 075211. [Google Scholar] [CrossRef]
- Nie, X.; Zhao, X.; Peng, T.; Scully, M.O. Sub-Nyquist computational ghost imaging with orthonormal spectrum-encoded speckle patterns. Phys. Rev. A 2022, 105, 043525. [Google Scholar] [CrossRef]
- Yao, J.; Jiang, Z.; Lv, X.; Peng, Q.; Zhao, X.; Song, L. Adaptive Fourier single-pixel imaging based on directional energy continuity in high frequencies. Opt. Lasers Eng. 2023, 162, 107406. [Google Scholar] [CrossRef]
- Golub, G.H.; Reinsch, C. Singular value decomposition and least squares solutions. In Handbook for Automatic Computation: Volume II: Linear Algebra; Springer: Berlin/Heidelberg, Germany, 1971; pp. 134–151. [Google Scholar]
- Tufts, D.W.; Kumaresan, R.; Kirsteins, I. Data adaptive signal estimation by singular value decomposition of a data matrix. Proc. IEEE 1982, 70, 684–685. [Google Scholar] [CrossRef]
- Hou, Z. Adaptive singular value decomposition in wavelet domain for image denoising. Pattern Recognit. 2003, 36, 1747–1763. [Google Scholar] [CrossRef]
- Zhang, H.Y.; Tao, M.; Ai, K. 2-D TSVD algorithm applied in image debluring problem. Comput. Eng. Appl. 2008, 44, 60–62. [Google Scholar]
- Qu, G.; Meng, X.; Yang, X.; Wu, H.; Wang, P.; He, W.; Chen, H. Optical color watermarking based on single-pixel imaging and singular value decomposition in invariant wavelet domain. Opt. Lasers Eng. 2021, 137, 106376. [Google Scholar] [CrossRef]
- Deng, Y.; She, R.; Liu, W.; Lu, Y.; Li, G. Single-pixel imaging based on deep learning enhanced singular value decomposition. Sensors 2024, 24, 2963. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Zhan, R.; Zhai, Q.; Wang, W.; Zhang, J. Multi-view radar target recognition based on multitask compressive sensing. J. Electromagn. Waves 2015, 29, 1917–1934. [Google Scholar] [CrossRef]
- Chen, W. Ghost identification based on single-pixel imaging in big data environment. Opt. Express 2017, 25, 16509–16516. [Google Scholar] [CrossRef]
- Torkkola, K. Feature extraction by non-parametric mutual information maximization. J. Mach. Learn. Res. 2003, 3, 1415–1438. [Google Scholar]
- Chen, H.; Shi, J.; Liu, X.; Niu, Z.; Zeng, G. Single-pixel non-imaging object recognition by means of Fourier spectrum acquisition. Opt. Commun. 2018, 413, 269–275. [Google Scholar] [CrossRef]
- He, X.; Zhao, S.M.; Wang, L. Handwritten digit recognition based on ghost imaging with deep learning. Chin. Phys. B 2021, 30, 054201. [Google Scholar] [CrossRef]
- He, Z.; Dai, S. Image-free single-pixel classifier using feature information measurement matrices. AIP Adv. 2024, 14, 045316. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.-S.; Zhao, Y.-N.; Ren, C.; Wang, C.; Cao, D.-Z. Target Recognition Based on Singular Value Decomposition in a Single-Pixel Non-Imaging System. Photonics 2024, 11, 909. https://doi.org/10.3390/photonics11100909
Chen L-S, Zhao Y-N, Ren C, Wang C, Cao D-Z. Target Recognition Based on Singular Value Decomposition in a Single-Pixel Non-Imaging System. Photonics. 2024; 11(10):909. https://doi.org/10.3390/photonics11100909
Chicago/Turabian StyleChen, Lin-Shan, Yi-Ning Zhao, Cheng Ren, Chong Wang, and De-Zhong Cao. 2024. "Target Recognition Based on Singular Value Decomposition in a Single-Pixel Non-Imaging System" Photonics 11, no. 10: 909. https://doi.org/10.3390/photonics11100909
APA StyleChen, L.-S., Zhao, Y.-N., Ren, C., Wang, C., & Cao, D.-Z. (2024). Target Recognition Based on Singular Value Decomposition in a Single-Pixel Non-Imaging System. Photonics, 11(10), 909. https://doi.org/10.3390/photonics11100909