Tensor-Based Joint Beamforming with Ultrasonic and RIS-Assisted Dual-Hop Hybrid FSO mmWave Massive MIMO of V2X


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
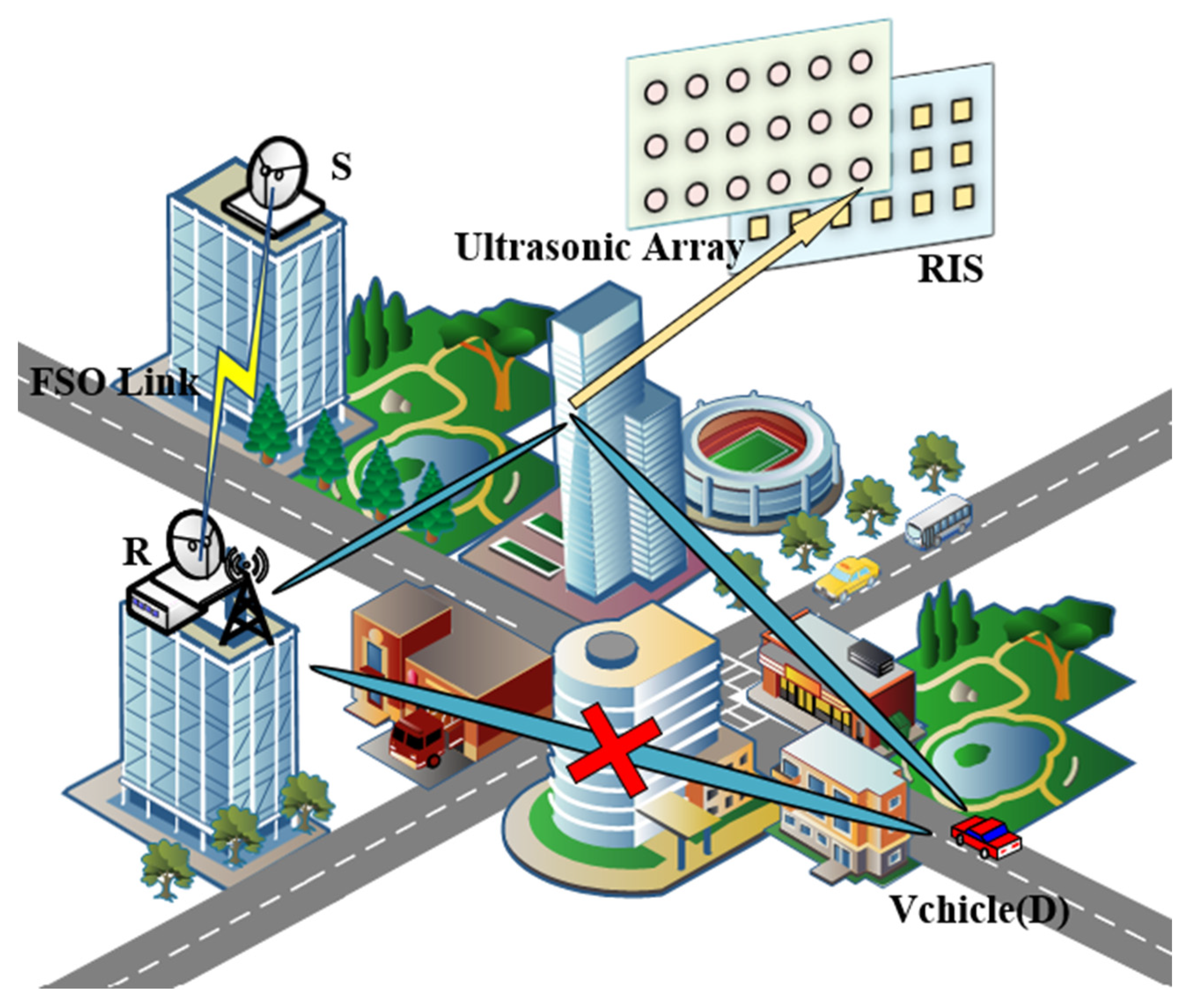
2. System Model and Channel Model
2.1. FSO System Model
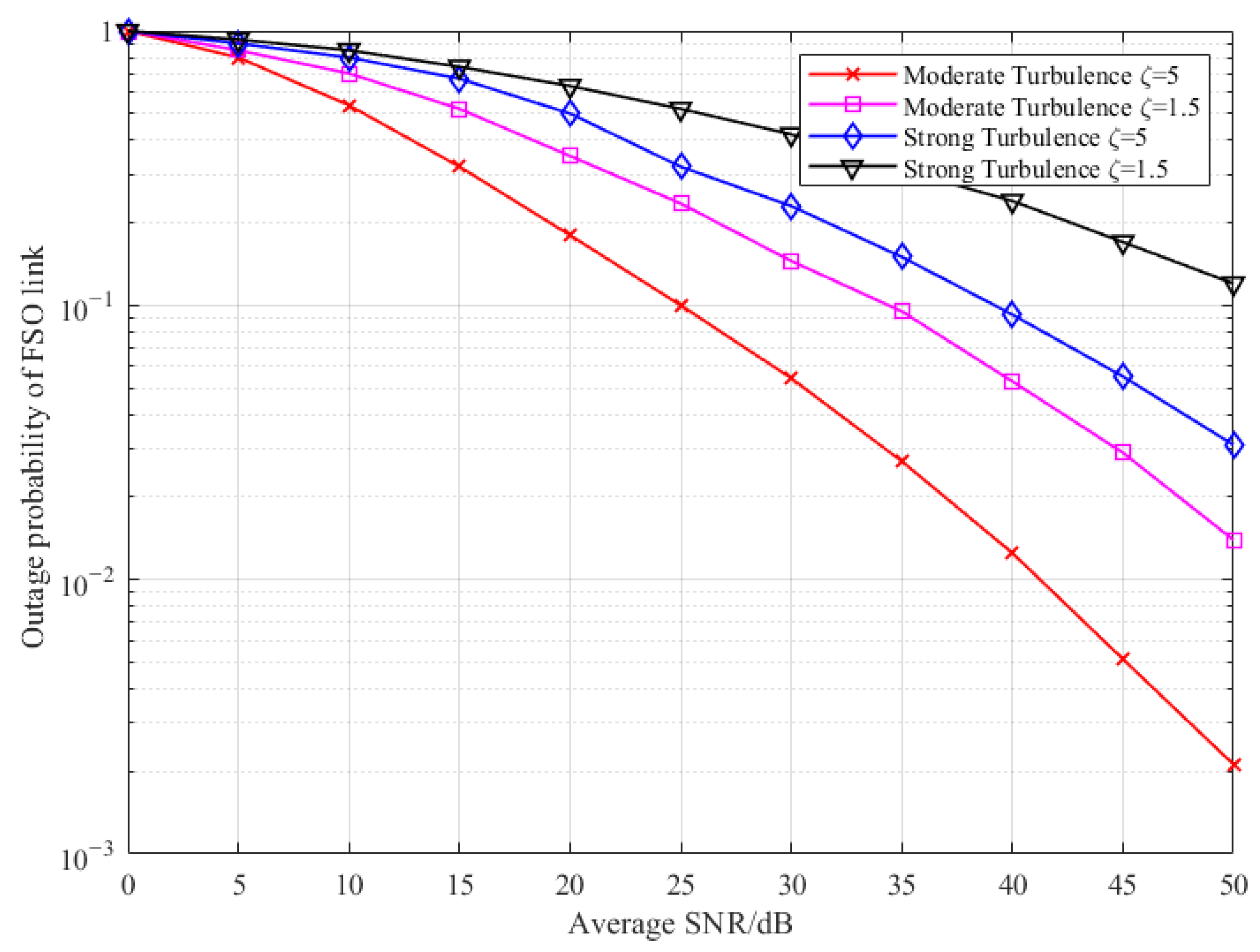
2.2. Outage Probability of the FSO Link
2.3. BER for the FSO Link
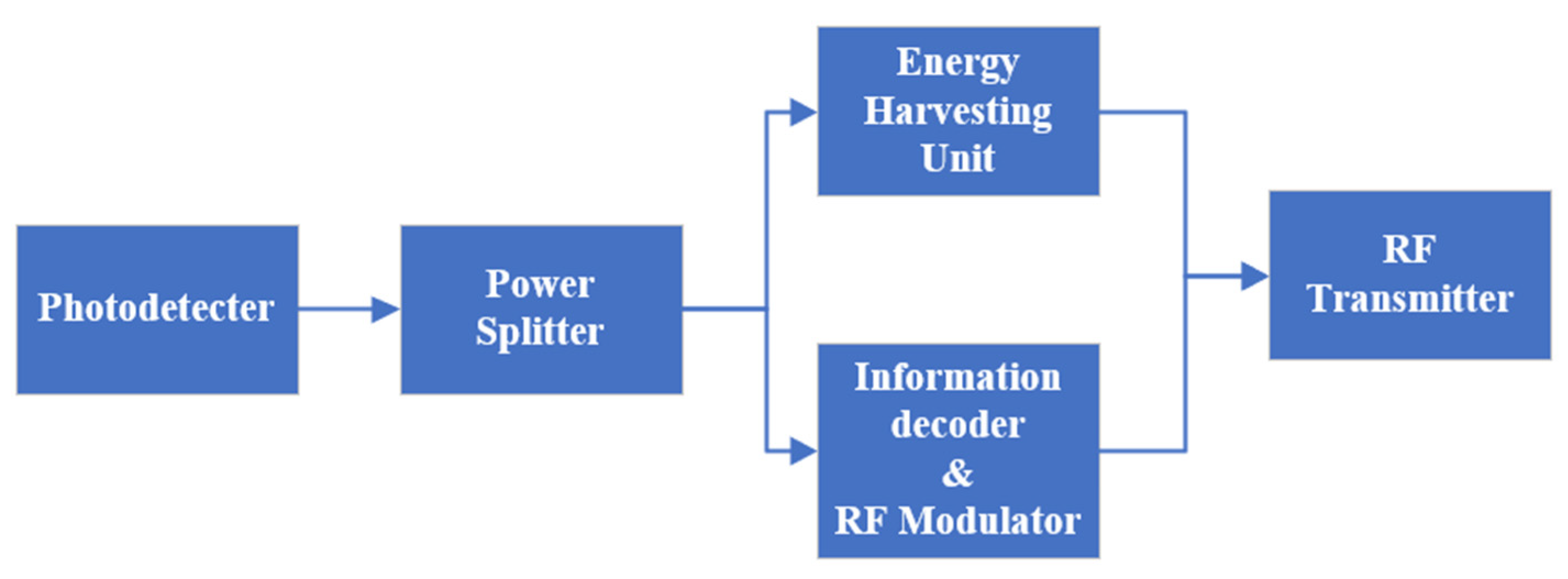
2.4. DF Transmission Protocal
2.5. RIS-Assisted mmWave Massive MIMO System Model
2.6. Ultrasonic Array Signal Model
2.7. MmWave Channel Model
3. Ultrasonic and RIS-Assisted mmWave Joint Beamforming Problem for Massive MIMO V2X
4. Ultrasonic-Assisted RIS Phase Shift Matrix Design Based on Subspace Self-Organizing Iterations
4.1. RIS Initial Phase Shift Matrix Solving Based on Ultrasonic-Assisted PF Algorithm
4.2. State Transition Model of Vehicle Motion for Prior Distribution
4.3. RIS Phase Shift Matrix Design Based on Subspace Self-Organizing Iterations
| Algorithm 1: RIS phase shift matrix design based on subspace self-organizing iterations. |
| 1. Input: A rough initial phase shift matrix for RIS 2. Eigenvalue decomposition to obtain signal subspace and noise subspace 3. 4. while do 5. Use each phase value in as the initial value, fix the first RIS cell 6. Calculate to obtain by (48) 7. Design a new phase shift matrix as 8. Calculate cost function 9. 10. Repeat the step4 to step9 until convergence occurs 11. Output: |
5. BS Beamforming Matrix Design
6. Tensor-Based Design of Vehicle Combination Matrix
7. Simulation Results and Analysis
7.1. Simulation Results of FSO Link
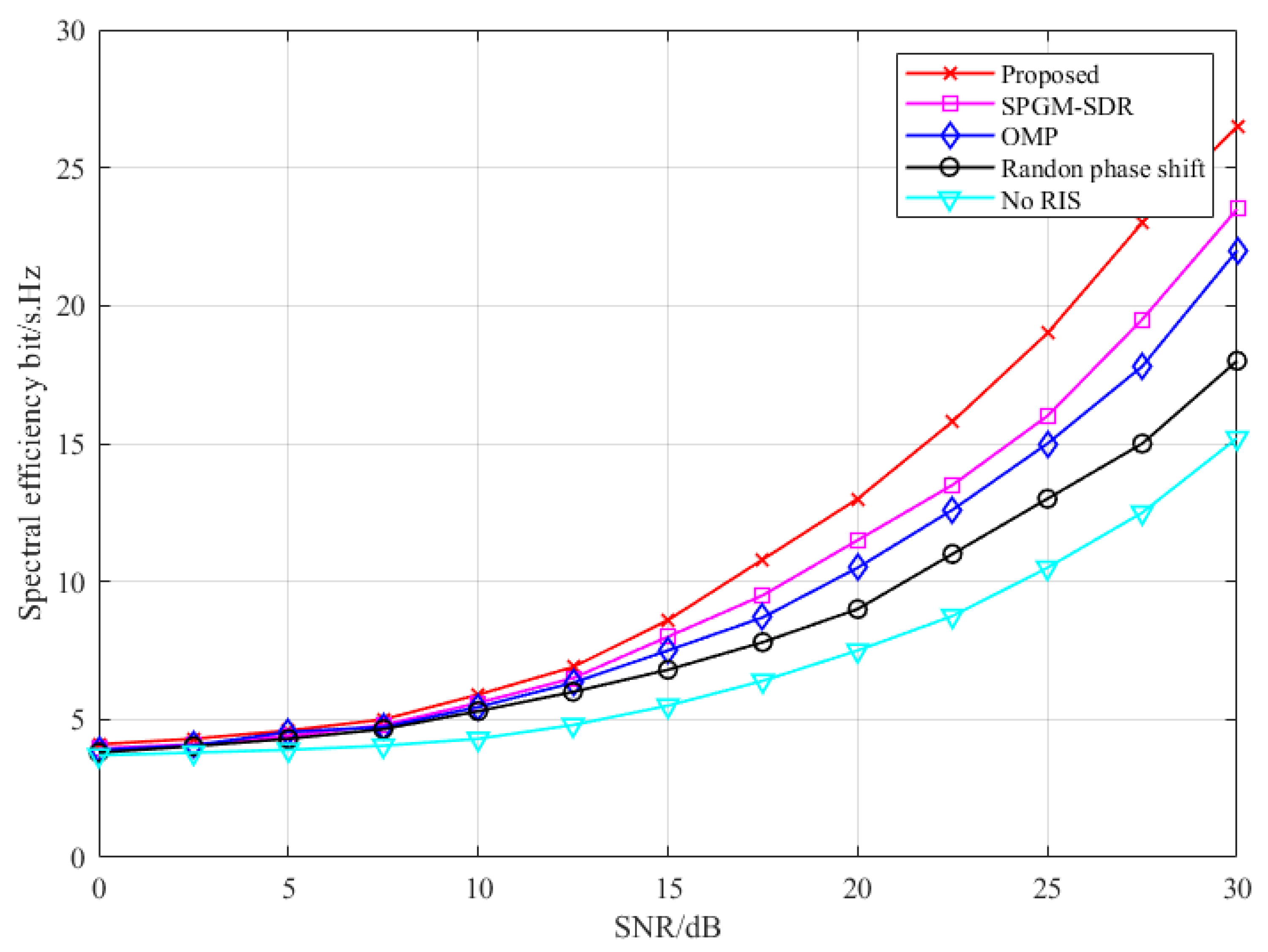
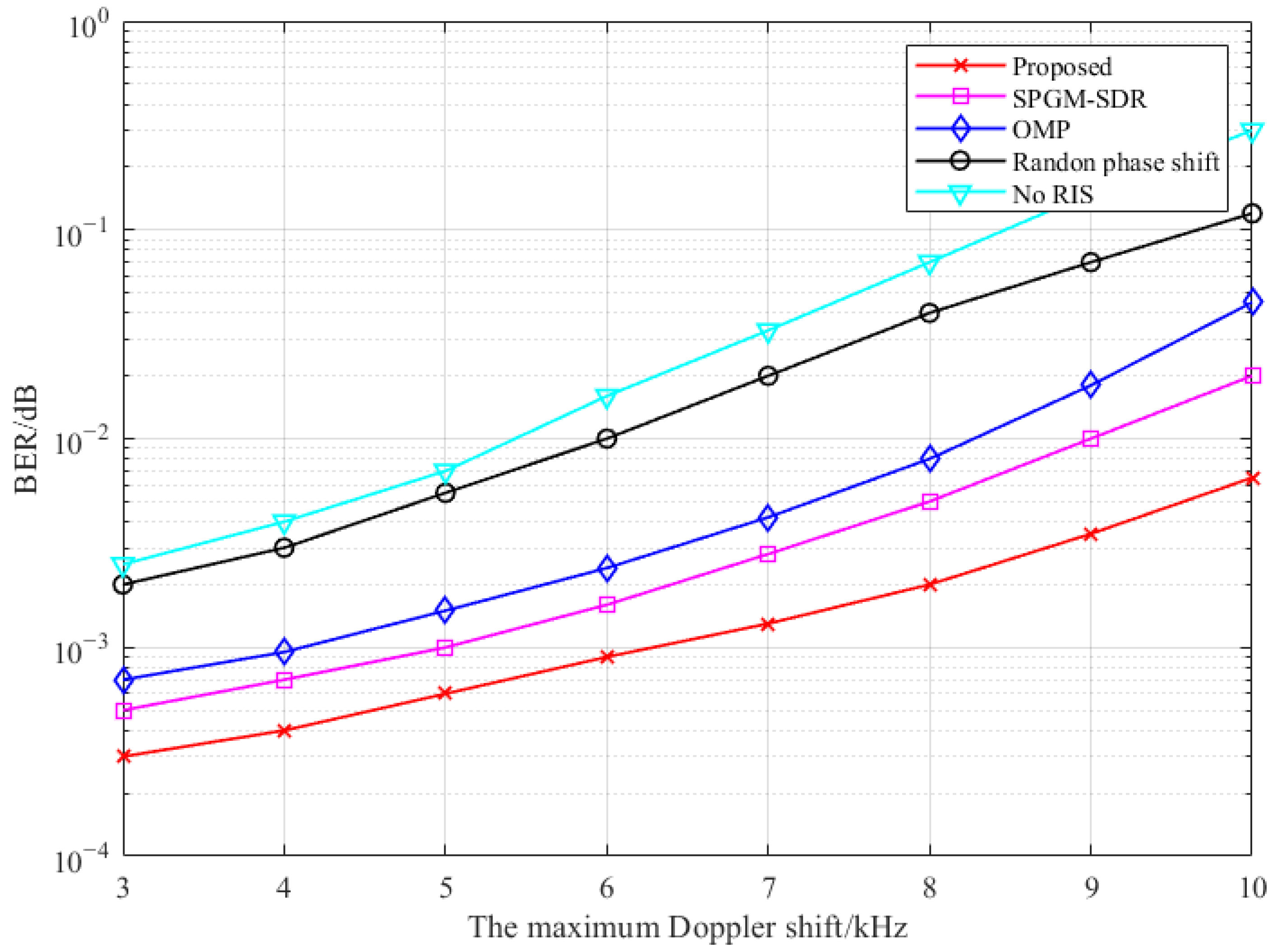
7.2. Simulation Results of V2X
8. Discussion
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nadeem, F.; Kvicera, V.; Awan, M.S.; Leitgeb, E.; Muhammad, S.; Kandus, G. Weather effects on hybrid FSO/RF communication link. IEEE J. Sel. Areas Commun. 2009, 27, 1687–1697. [Google Scholar] [CrossRef]
- Erdogan, E.; Altunbas, I.; Kurt, G.K.; Yanikomeroglu, H. The Secrecy Comparison of RF and FSO Eavesdropping Attacks in Mixed RF-FSO Relay Networks. IEEE Photonics J. 2022, 14, 7901508. [Google Scholar] [CrossRef]
- Zhou, X.; Tian, X.; Tong, L.; Wang, Y. Manifold Learning Inspired Dynamic Hybrid Precoding With Antenna Partitioning Algorithm for Dual-Hop Hybrid FSO-RF Systems. IEEE Access 2022, 10, 133385–133401. [Google Scholar] [CrossRef]
- Yahia, O.; Erdogan, E.; Kurt, G.; Altunbas, I.; Yanikomeroglu, H. HAPS Selection for Hybrid RF/FSO Satellite Networks. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 2855–2867. [Google Scholar] [CrossRef]
- Xu, G.; Zhang, N.; Xu, M.; Xu, Z.; Zhang, Q.; Song, Z. Outage Probability and Average BER of UAV-Assisted Dual-Hop FSO Communication With Amplify-and-Forward Relaying. IEEE Trans. Veh. Technol. 2023, 72, 8287–8302. [Google Scholar] [CrossRef]
- Pham, T.V.; Thang, T.C.; Pham, A. Average Achievable Rate of Spatial Diversity MIMO-FSO Over Correlated Gamma–Gamma Fading Channels. J. Opt. Commun. Netw. 2018, 10, 662–674. [Google Scholar] [CrossRef]
- Shi, T.; Qi, Y.; Wu, B. Hybrid Free Space Optical Communication and Radio Frequency MIMO System for Photonic Interference Separation. IEEE Photonics Technol. Lett. 2022, 34, 149–152. [Google Scholar] [CrossRef]
- Jaiswal, A.; Abaza, M.; Bhatnagar, M.R.; Jain, V.K. An Investigation of Performance and Diversity Property of Optical Space Shift Keying-Based FSO-MIMO System. IEEE Trans. Commun. 2018, 66, 4028–4042. [Google Scholar] [CrossRef]
- Naik, G.; Choudhury, B.; Park, J. IEEE 802.11bd & 5G NR V2X: Evolution of Radio Access Technologies for V2X Communications. IEEE Access 2019, 7, 70169–70184. [Google Scholar]
- Storck, C.; Figueiredo, F. A Survey of 5G Technology Evolution, Standards, and Infrastructure Associated With Vehicle-to-Everything Communications by Internet of Vehicles. IEEE Access 2020, 8, 117593–117614. [Google Scholar] [CrossRef]
- Rappaport, T.S.; Xing, Y.; MacCartney, G.R.; Molisch, A.F.; Mellios, E.; Zhang, J. Overview of Millimeter Wave Communications for Fifth-Generation (5G) Wireless Networks—With a Focus on Propagation Models. IEEE Trans. Antennas Propag. 2017, 65, 6213–6230. [Google Scholar] [CrossRef]
- Shamim, S.; Hossain, M.; Ta-seen, G.; Miah, M.; Uddin, M. Performance Analysis of Omni-Directional and Directional Power Delay Profile for Millimeter Wave 5G Cellular Networks in LOS Environment. In Proceedings of the 2018 International Conference on Advancement in Electrical and Electronic Engineering (ICAEEE), Gazipur, Bangladesh, 22–24 November 2018. [Google Scholar]
- Feng, C.; Shen, W.; An, J.; Hanzo, L. Joint Hybrid and Passive RIS-Assisted Beamforming for mmWave MIMO Systems Relying on Dynamically Configured Subarrays. IEEE Internet Things J. 2022, 9, 13913–13926. [Google Scholar] [CrossRef]
- Wang, P.; Fang, J.; Dai, L.; Li, H. Joint Transceiver and Large Intelligent Surface Design for Massive MIMO mmWave Systems. IEEE Trans. Wirel. Commun. 2021, 20, 1052–1064. [Google Scholar] [CrossRef]
- Long, Y.; Chen, Z.; Fang, J. Minimum Number of Antennas Required to Satisfy Outage Probability in Massive MIMO Systems. IEEE Wirel. Commun. Lett. 2016, 5, 348–351. [Google Scholar] [CrossRef]
- Gu, X.; Zhang, G.; Ji, Y.; Duan, W.; Wen, M.; Ding, Z.; Ho, P.-H. Intelligent Surface Aided D2D-V2X System for Low-Latency and High-Reliability Communications. IEEE Trans. Veh. Technol. 2022, 71, 11624–11636. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, Y.; Zhang, J.; Di Renzo, M. QoS-Driven Spectrum Sharing for Reconfigurable Intelligent Surfaces (RISs) Aided Vehicular Networks. IEEE Trans. Wirel. Commun. 2021, 20, 5969–5985. [Google Scholar] [CrossRef]
- YOzcan, Y.U.; Ozdemir, O.; Kurt, G.K. Reconfigurable Intelligent Surfaces for the Connectivity of Autonomous Vehicles. IEEE Trans. Veh. Technol. 2021, 70, 2508–2513. [Google Scholar] [CrossRef]
- Singh, G.; Srivastava, A.; Bohara, V.A. Visible Light and Reconfigurable Intelligent Surfaces for Beyond 5G V2X Communication Networks at Road Intersections. IEEE Trans. Veh. Technol. 2022, 71, 8137–8151. [Google Scholar] [CrossRef]
- Ardah, K.; Gherekhloo, S.; de Almeida, A.L.F.; Haardt, M. TRICE: A Channel Estimation Framework for RIS-Aided Millimeter-Wave MIMO Systems. IEEE Signal Process. Lett. 2021, 28, 513–517. [Google Scholar] [CrossRef]
- Yang, Y.; Dang, S.; Wen, M.; Mumtaz, S.; Guizani, M. Bayesian Beamforming for Mobile Millimeter Wave Channel Tracking in the Presence of DOA Uncertainty. IEEE Trans. Commun. 2020, 68, 7547–7562. [Google Scholar] [CrossRef]
- Yang, Z.; Chen, P.; Guo, Z.; Ni, D. Low-Cost Beamforming and DOA Estimation Based on One-Bit Reconfigurable Intelligent Surface. IEEE Signal Process. Lett. 2022, 29, 2397–2401. [Google Scholar] [CrossRef]
- Chen, P.; Yang, Z.; Chen, Z.; Guo, Z. Reconfigurable Intelligent Surface Aided Sparse DOA Estimation Method With Non-ULA. IEEE Signal Process. Lett. 2021, 28, 2023–2027. [Google Scholar] [CrossRef]
- Wan, L.; Sun, Y.; Sun, L.; Ning, Z.; Rodrigues, J.J.P.C. Deep Learning Based Autonomous Vehicle Super Resolution DOA Estimation for Safety Driving. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4301–4315. [Google Scholar] [CrossRef]
- Zhong, X.; Premkumar, A.B. Particle Filtering Approaches for Multiple Acoustic Source Detection and 2-D Direction of Arrival Estimation Using a Single Acoustic Vector Sensor. IEEE Trans. Signal Process. 2012, 60, 4719–4733. [Google Scholar] [CrossRef]
- Chen, P.; Chen, Z.; Zheng, B.; Wang, X. Efficient DOA Estimation Method for Reconfigurable Intelligent Surfaces Aided UAV Swarm. IEEE Trans. Signal Process. 2022, 70, 743–755. [Google Scholar] [CrossRef]
- Wang, H.; Wan, L.; Dong, M.; Ota, K.; Wang, X. Assistant Vehicle Localization Based on Three Collaborative Base Stations via SBL-Based Robust DOA Estimation. IEEE Internet Things J. 2019, 6, 5766–5777. [Google Scholar] [CrossRef]
- Gomes, P.; Fodor, G.; Freitas, W.; Almeida, A.; Silva, Y. Tensor-Based Modeling and Processing for Channel Estimation in Two-Hop V2X MIMO Systems. In Proceedings of the 2019 IEEE Conference on Standards for Communications and Networking (CSCN), Granada, Spain, 28–30 October 2019. [Google Scholar]
- Luo, K.; Zhou, X.; Wang, B.; Huang, J.; Liu, H. Sparse Bayes Tensor and DOA Tracking Inspired Channel Estimation for V2X Millimeter Wave Massive MIMO System. Sensors 2021, 21, 4021. [Google Scholar] [CrossRef]
- Zhou, X.; Ma, Z.; Li, J.; Yu, L. Ultrasonic-Aided Fast-Layered Alternating Iterative Tensor Channel Estimation for V2X Millimeter-Wave Massive MIMO Systems. Electronics 2022, 11, 3742. [Google Scholar] [CrossRef]
- Chen, J.; Yang, L.; Wang, W.; Yang, H.C.; Liu, Y.; Hasna, M.O.; Alouini, M.S. A Novel Energy Harvesting Scheme for Mixed FSO-RF Relaying Systems. IEEE Trans. Veh. Technol. 2019, 68, 8259–8263. [Google Scholar] [CrossRef]
- Ansari, I.S.; Yilmaz, F.; Alouini, M.-S. Performance Analysis of FSO Links over Unified Gamma-Gamma Turbulence Channels. In Proceedings of the 2015 IEEE 81st Vehicular Technology Conference (VTC Spring), Glasgow, UK, 11–14 May 2015. [Google Scholar]
- Tokgoz, S.; Althunibat, S.; Yarkan, S.; Qaraqe, K. Physical Layer Security of Hybrid FSO-mmWave Communications in Presence of Correlated Wiretap Channels. In Proceedings of the ICC 2021—IEEE International Conference on Communications, Montreal, QC, Canada, 11–14 May 2021. [Google Scholar]
- The Wolfram Functions Site. Available online: https://functions.wolfram.com (accessed on 25 May 2023).
- Sun, Q.; Zhang, Z.; Zhang, Y.; Lopez-Benitez, M.; Zhang, J. Performance Analysis of Dual-Hop Wireless Systems Over Mixed FSO/RF Fading Channel. IEEE Access 2021, 9, 85529–85542. [Google Scholar] [CrossRef]
- Sun, W.; Yang, Y. Adaptive maneuvering frequency method of current statistical model. IEEE/CAA J. Autom. Sin. 2017, 4, 154–160. [Google Scholar] [CrossRef]
- Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Xiu, Y.; Zhao, J.; Sun, W.; Di Renzo, M.; Gui, G.; Zhang, Z.; Wei, N. Reconfigurable Intelligent Surfaces Aided mmWave NOMA: Joint Power Allocation, Phase Shifts, and Hybrid Beamforming Optimization. IEEE Trans. Wirel. Commun. 2021, 20, 8393–8409. [Google Scholar] [CrossRef]
- Djordjevic, G.T.; Petkovic, M.I.; Spasic, M.; Antic, D.S. Outage capacity of FSO link with pointing errors and link blockage. Opt. Express 2016, 24, 219–230. [Google Scholar] [CrossRef] [PubMed]
- Gappmair, W.; Flohberger, M. Error performance of coded FSO links in turbulent atmosphere modeled by gamma-gamma distributions. IEEE Trans. Wirel. Commun. 2009, 8, 2209–2213. [Google Scholar] [CrossRef]
- Roach, K. Meijer G function representations. In Proceedings of the 1997 International Symposium on Symbolic and Algebraic Computation, Kihei, Maui, HI, USA, 21–23 July 1997; pp. 205–211. [Google Scholar]
- Touati, A.; Abdaoui, A.; Touati, F.; Uysal, M.; Bouallegue, A. On the effects of combined atmospheric fading and misalignment on the hybrid FSO/RF transmission. J. Opt. Commun. Netw. 2016, 8, 715–725. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, X.; Zeng, Z.; Li, J.; Ma, Z.; Tong, L. Tensor-Based Joint Beamforming with Ultrasonic and RIS-Assisted Dual-Hop Hybrid FSO mmWave Massive MIMO of V2X. Photonics 2023, 10, 880. https://doi.org/10.3390/photonics10080880
Zhou X, Zeng Z, Li J, Ma Z, Tong L. Tensor-Based Joint Beamforming with Ultrasonic and RIS-Assisted Dual-Hop Hybrid FSO mmWave Massive MIMO of V2X. Photonics. 2023; 10(8):880. https://doi.org/10.3390/photonics10080880
Chicago/Turabian StyleZhou, Xiaoping, Zhaonan Zeng, Jiehui Li, Zhen Ma, and Le Tong. 2023. "Tensor-Based Joint Beamforming with Ultrasonic and RIS-Assisted Dual-Hop Hybrid FSO mmWave Massive MIMO of V2X" Photonics 10, no. 8: 880. https://doi.org/10.3390/photonics10080880
APA StyleZhou, X., Zeng, Z., Li, J., Ma, Z., & Tong, L. (2023). Tensor-Based Joint Beamforming with Ultrasonic and RIS-Assisted Dual-Hop Hybrid FSO mmWave Massive MIMO of V2X. Photonics, 10(8), 880. https://doi.org/10.3390/photonics10080880