Self-Mixing Interferometry Cooperating with Frequency Division Multiplexing for Multiple-Dimensional Displacement Measurement



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Theory
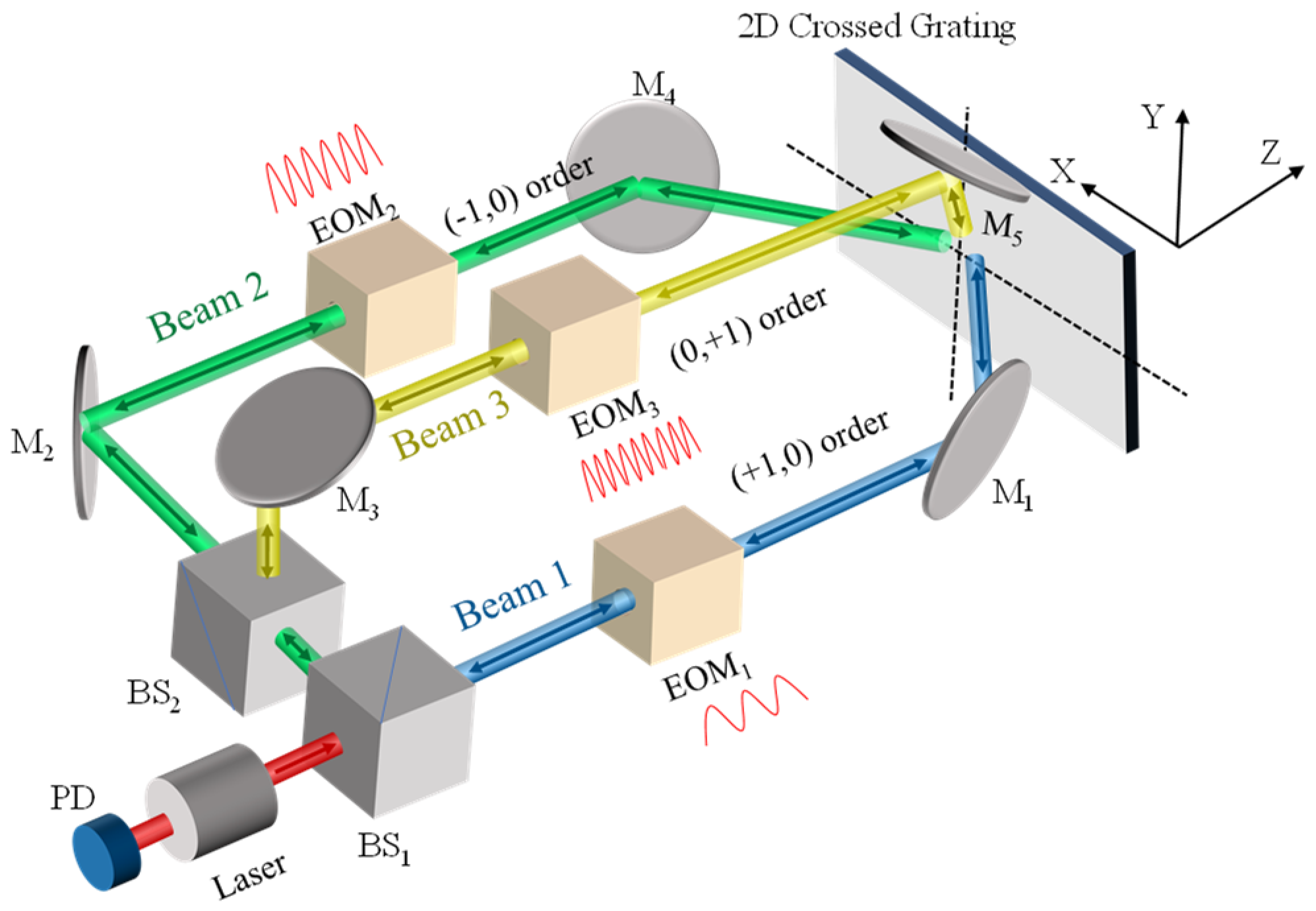
2.1. Theory of Three-Dimensional Displacement Measurement by Grating-Based SMI
2.2. Phase Extraction Based on FDM
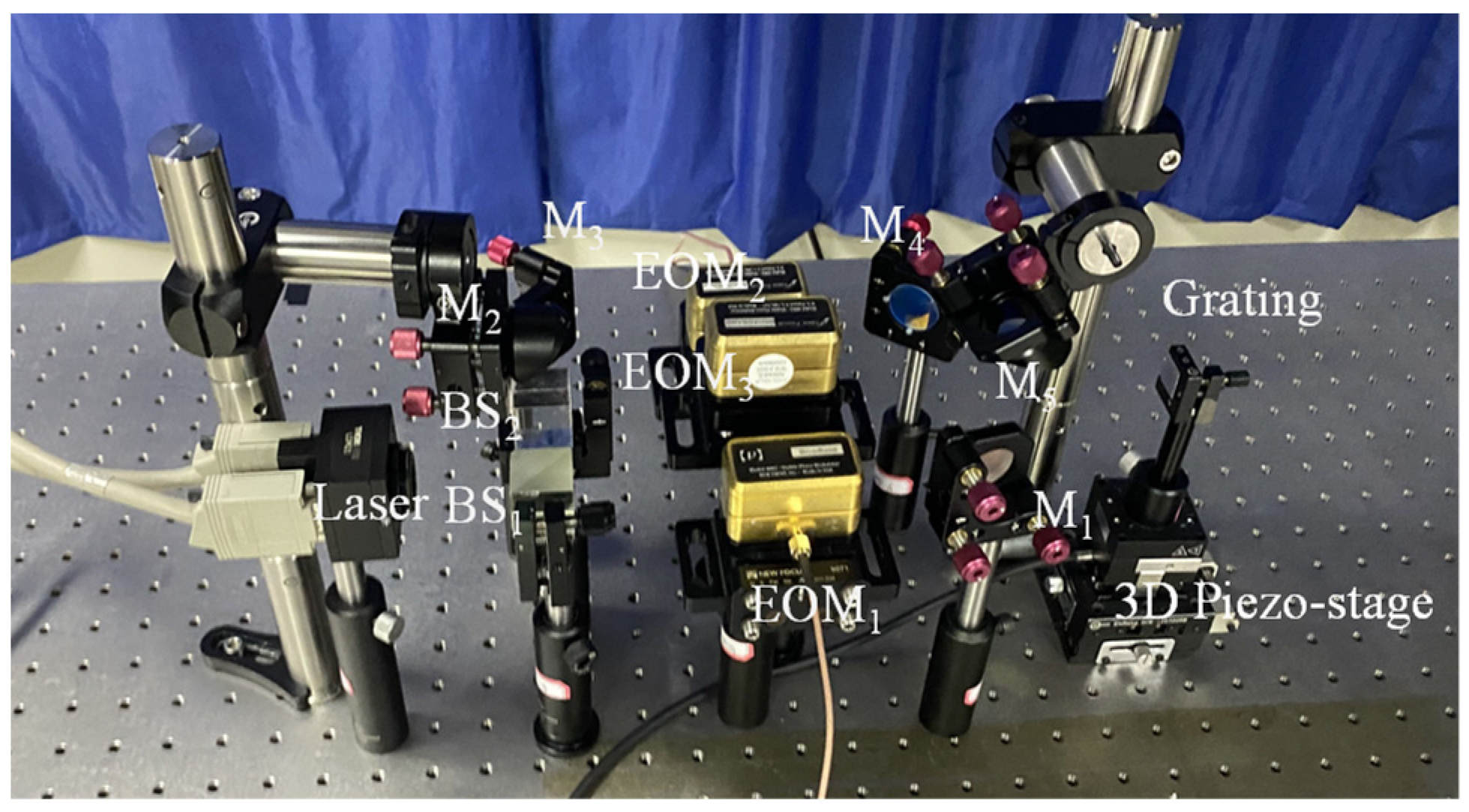
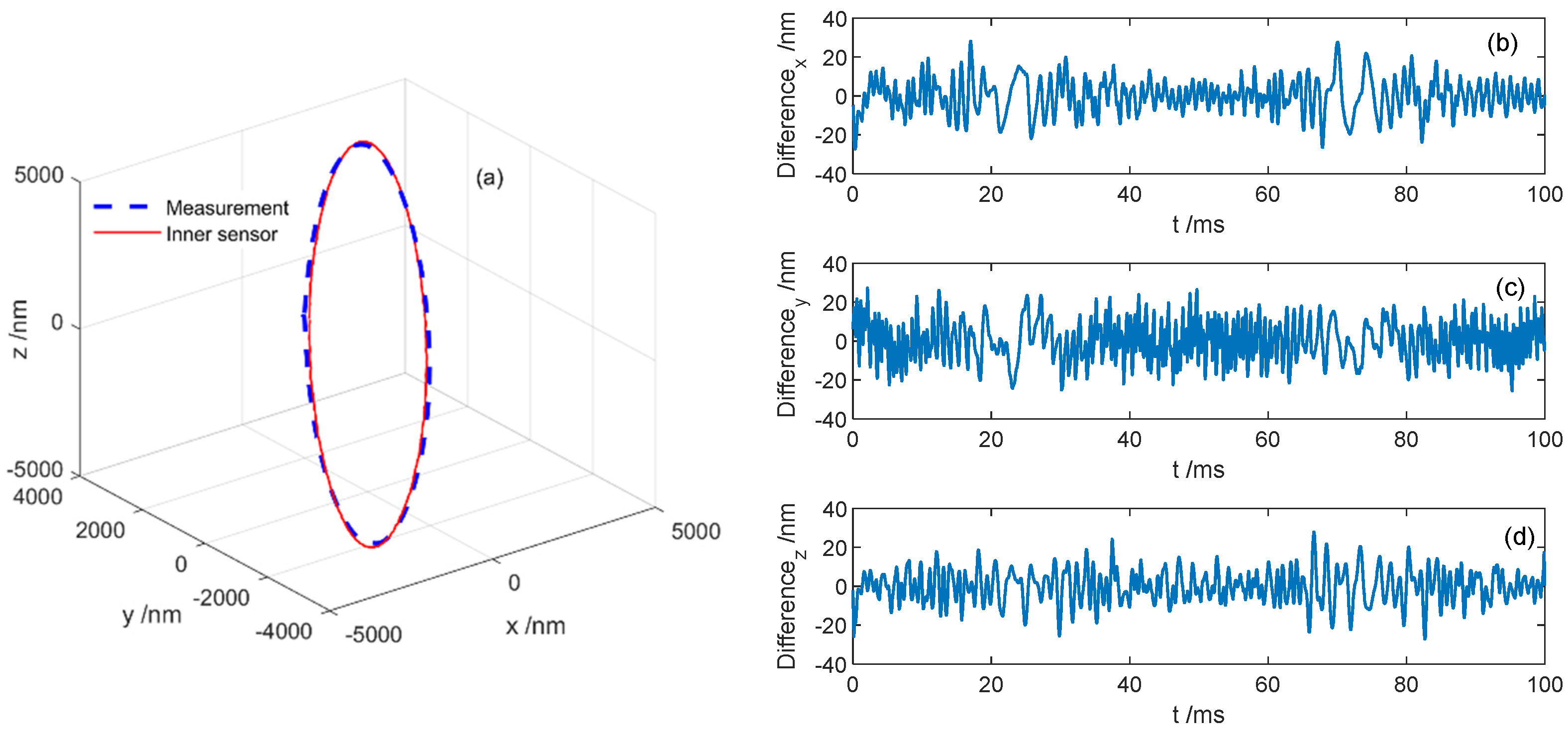
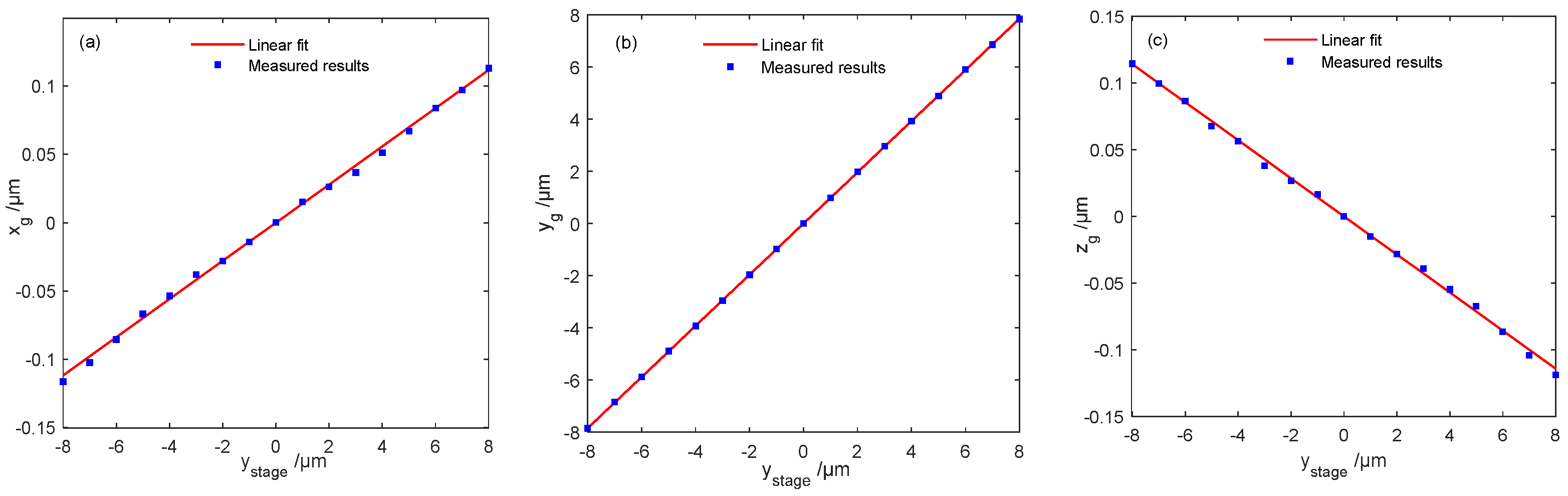
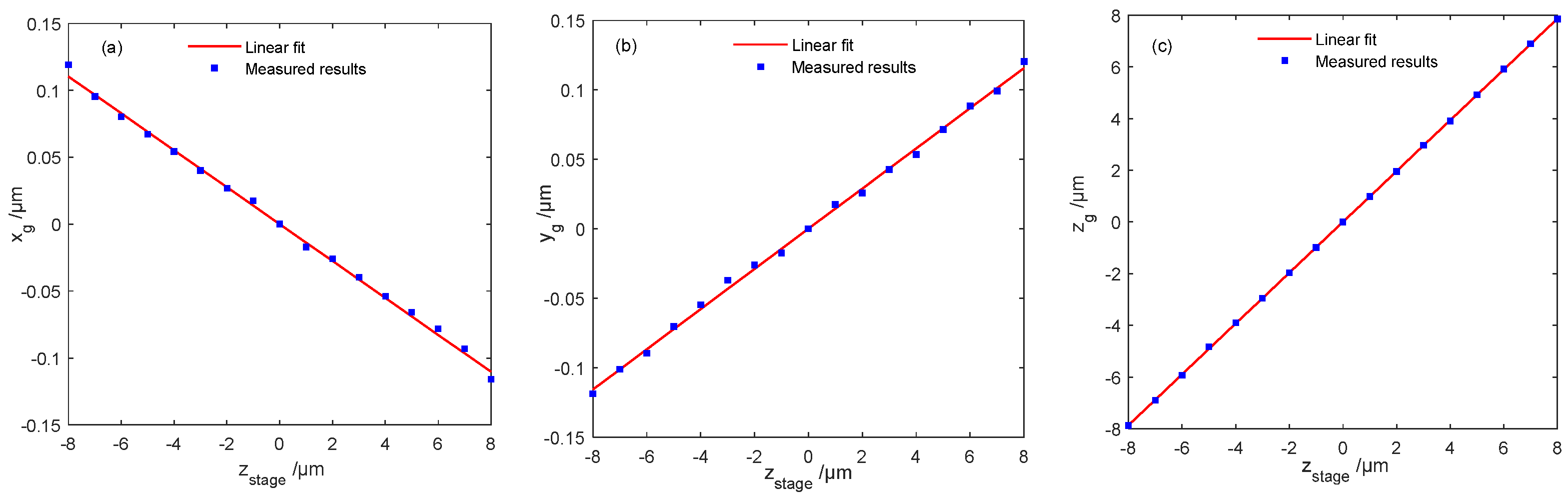
3. Experimental Results
4. Discussion
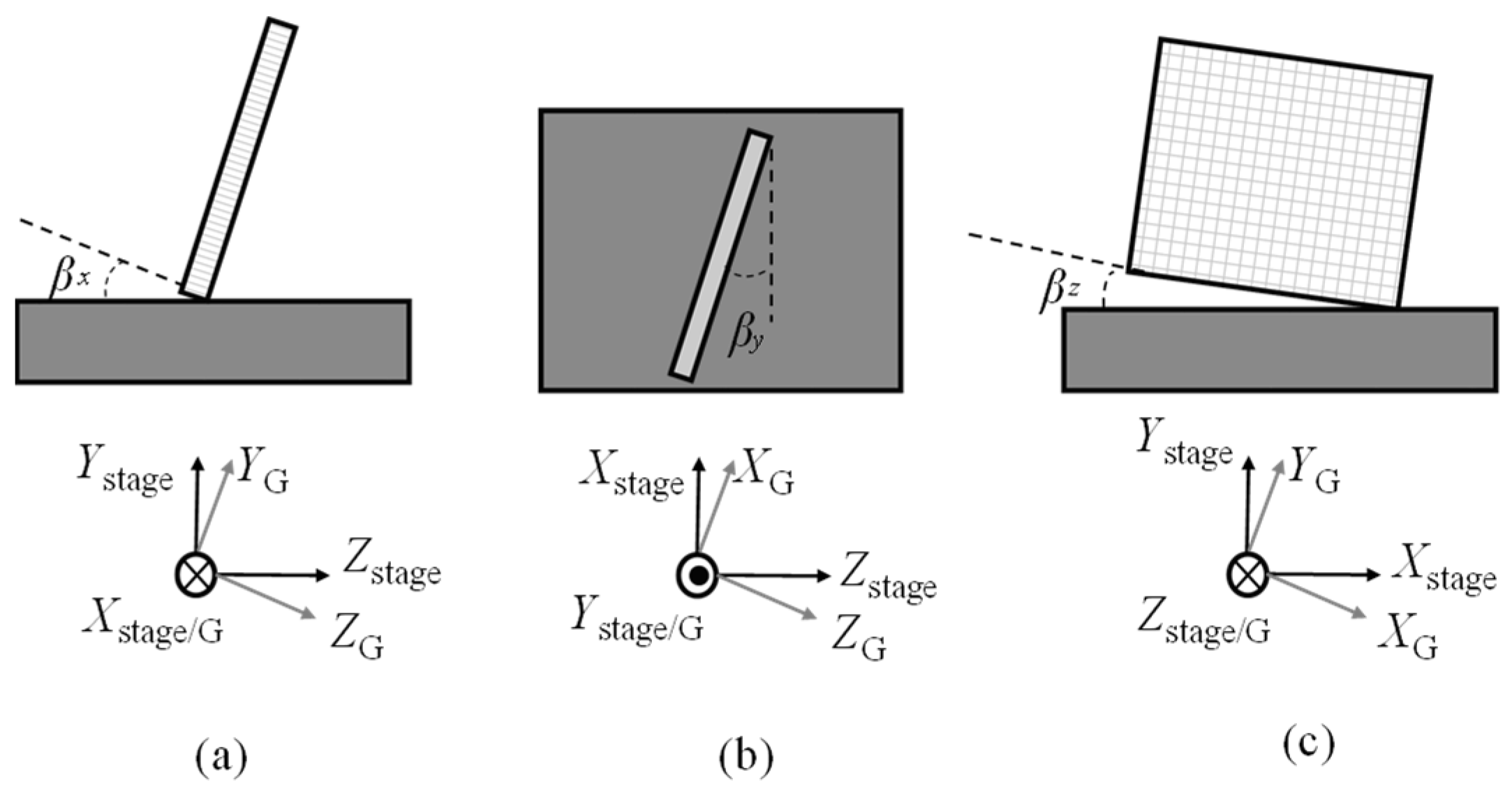
4.1. Misalignment Factors
- Case 1: yaw angle βx
- Case 2: yaw angle βy
- Case 3: yaw angle βz
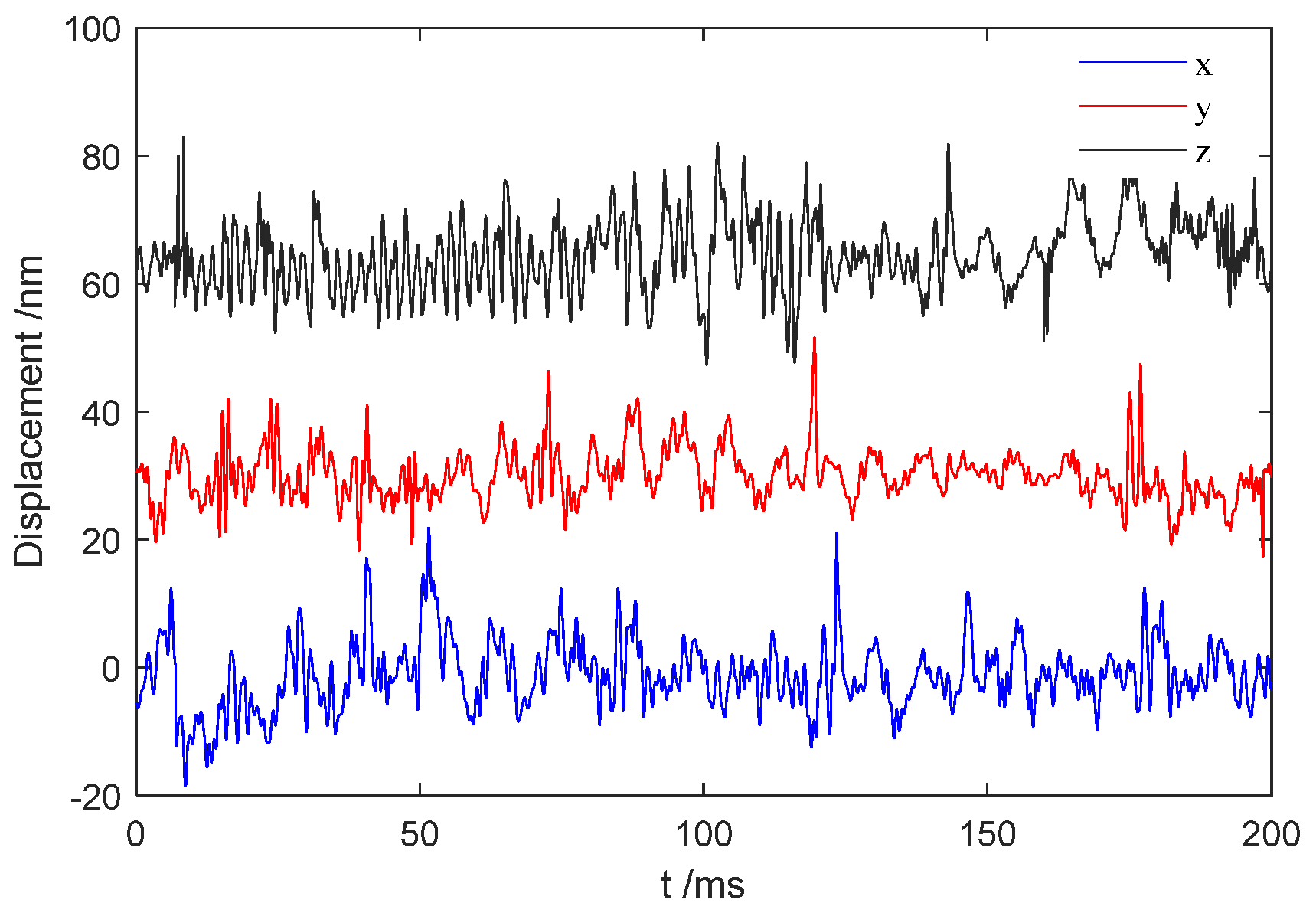
4.2. Resolution Testing
4.3. Displacement and Velocity Measurement Range
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Restagno, F.; Crassous, J.; Charlaix, E.; Monchanin, M. A new capacitive sensor for displacement measurement in a surface-force apparatus. Meas. Sci. Technol. 2001, 12, 16–22. [Google Scholar] [CrossRef]
- Ramana, Y.V.; Sarma, L.P. Simple and sensitive strain gauge displacement transducer. Rev. Sci. Instrum. 1981, 52, 1417–1419. [Google Scholar] [CrossRef]
- Merino, S.; Retolaza, A.; Lizuain, I. Linear optical encoders manufactured by imprint lithography. Microelectron. Eng. 2006, 83, 897–901. [Google Scholar] [CrossRef]
- Ramaiah, J.; Gannavarpu, R. Dynamic displacement measurement in digital holographic interferometry using eigenspace analysis. Appl. Opt. 2021, 60, 10468–10476. [Google Scholar] [CrossRef] [PubMed]
- Kao, C.F.; Lu, S.-H.; Shen, H.-M.; Fan, K.-C. Diffractive Laser Encoder with a Grating in Littrow Configuration. Jpn. J. Appl. Phys. 2008, 47, 1833–1837. [Google Scholar] [CrossRef]
- Teimel, A. Technology and applications of grating interferometers in high-precision measurement. Precis. Eng. 1992, 14, 147–154. [Google Scholar] [CrossRef]
- Kimura, A.; Gao, W.; Kim, W.; Hosono, K.; Shimizu, Y.; Shi, L.; Zeng, L. A sub-nanometric three-axis surface encoder with short-period planar gratings for stage motion measurement. Precis. Eng. 2012, 36, 576–585. [Google Scholar] [CrossRef]
- Khan, J.I.; Zabit, U. On Two Fourier Transform-Based Methods for Estimation of Displacement and Parameters of Self-Mixing Interferometry Over Major Optical Feedback Regimes. IEEE Sens. J. 2021, 21, 10610–10617. [Google Scholar] [CrossRef]
- Naveed, M.; Zabit, U. Real-Time Adaptive Spectral Filter Based Parasitic Vibration Cancellation in Self-Mixing Laser Sensor Signals. IEEE Sens. J. 2021, 21, 24371–24378. [Google Scholar] [CrossRef]
- Fathi, M.T.; Donati, S. Thickness measurement of transparent plates by a self-mixing interferometer. Opt. Lett. 2010, 35, 1844–1846. [Google Scholar] [CrossRef] [PubMed]
- Contreras, V.; Toivonen, J.; Martinez, H. Enhanced self-mixing interferometry based on volume Bragg gratings and laser diodes emitting at 405-nm wavelengths. Opt. Lett. 2017, 42, 2221–2223. [Google Scholar] [CrossRef] [PubMed]
- Taimre, T.; Nikolić, M.; Bertling, K.; Lim, Y.L.; Bosch, T.; Rakić, A.D. Laser feedback interferometry: A tutorial on the self-mixing effect for coherent sensing. Adv. Opt. Photonics 2015, 7, 570–631. [Google Scholar] [CrossRef]
- Giuliani, G.; Norgia, M.; Donati, S.; Bosch, T. Laser diode self-mixing technique for sensing applications. J. Opt. A Pure Appl. Opt. 2002, 4, S283–S294. [Google Scholar] [CrossRef]
- Kliese, R.; Rakic, A.D. Spectral broadening caused by dynamic speckle in self-mixing velocimetry sensors. Opt. Express 2012, 20, 18757–18771. [Google Scholar] [CrossRef] [PubMed]
- Randone, E.M.; Donati, S. Self-mixing interferometer: Analysis of the output signals. Opt. Express 2006, 14, 9188–9196. [Google Scholar] [CrossRef] [PubMed]
- Guo, D.; Shi, L.; Yu, Y.; Xia, W.; Wang, M. Micro-displacement reconstruction using a laser self-mixing grating interferometer with multiple-diffraction. Opt. Express 2017, 25, 31394–31406. [Google Scholar] [CrossRef] [PubMed]
- Guo, D.; Yu, Y.; Kong, L.; Xia, W.; Wang, M. Self-Mixing Grating Interferometer with Dual Laser Diodes for Sensing of 2-D Dynamic Displacement. IEEE J. Quantum Electron. 2018, 54, 1–6. [Google Scholar] [CrossRef]
- Jiang, C.; Geng, Y.; Liu, Y.; Liu, Y.; Chen, P.; Yin, S. Rotation velocity measurement based on self-mixing interference with a dual-external-cavity single-laser diode. Appl. Opt. 2019, 58, 604–608. [Google Scholar] [CrossRef] [PubMed]
- Loewen, G. Diffraction Grating Handbook, 7th ed.; Newport Corporation: New York, NY, USA, 2014. [Google Scholar]
- Minoni, U.; Sardini, E.; Gelmini, E.; Docchio, F.; Marioli, D. A high-frequency sinusoidal phase-modulation interferometer using an electro-optic modulator: Development and evaluation. Rev. Sci. Instrum. 1991, 62, 2579–2583. [Google Scholar] [CrossRef]
- Lee, J.Y.; Hsieh, H.L.; Lerondel, G.; Deturche, R.; Lu, M.P.; Chen, J.C. Heterodyne grating interferometer based on a quasi-common-optical-path configuration for a two-degrees-of-freedom straightness measurement. Appl. Opt. 2011, 50, 1272–1279. [Google Scholar] [CrossRef] [PubMed]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, D.; Xie, Z.; Yang, Q.; Xia, W.; Yu, Y.; Wang, M. Self-Mixing Interferometry Cooperating with Frequency Division Multiplexing for Multiple-Dimensional Displacement Measurement. Photonics 2023, 10, 839. https://doi.org/10.3390/photonics10070839
Guo D, Xie Z, Yang Q, Xia W, Yu Y, Wang M. Self-Mixing Interferometry Cooperating with Frequency Division Multiplexing for Multiple-Dimensional Displacement Measurement. Photonics. 2023; 10(7):839. https://doi.org/10.3390/photonics10070839
Chicago/Turabian StyleGuo, Dongmei, Zhanwu Xie, Qin Yang, Wei Xia, Yanguang Yu, and Ming Wang. 2023. "Self-Mixing Interferometry Cooperating with Frequency Division Multiplexing for Multiple-Dimensional Displacement Measurement" Photonics 10, no. 7: 839. https://doi.org/10.3390/photonics10070839
APA StyleGuo, D., Xie, Z., Yang, Q., Xia, W., Yu, Y., & Wang, M. (2023). Self-Mixing Interferometry Cooperating with Frequency Division Multiplexing for Multiple-Dimensional Displacement Measurement. Photonics, 10(7), 839. https://doi.org/10.3390/photonics10070839