FPGA-Based Hardware Implementation of Homodyne Demodulation for Optical Fiber Sensors

 ,
,  , and
, and
Abstract
1. Introduction
2. Materials and Methods
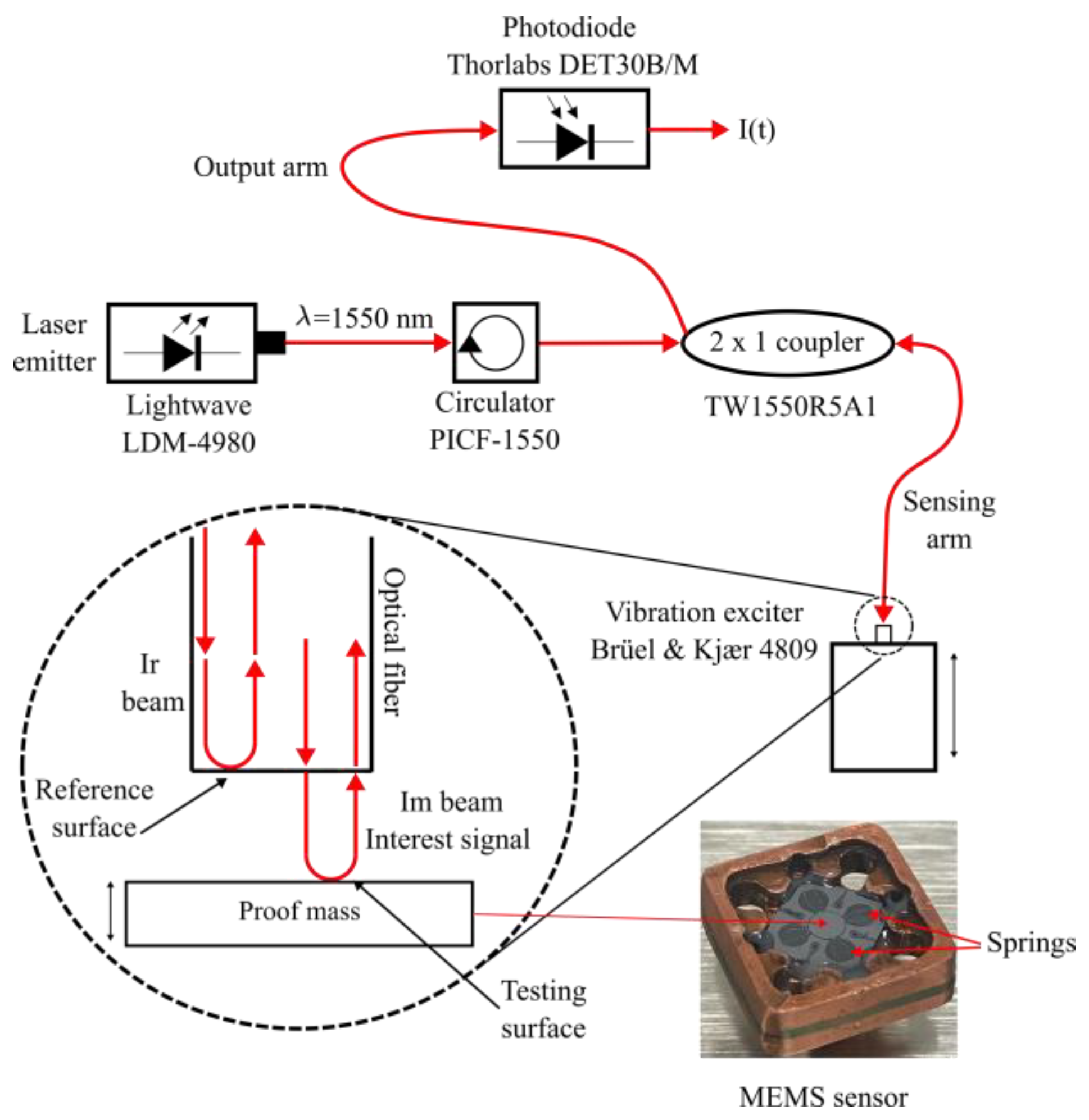
2.1. Optical Setup
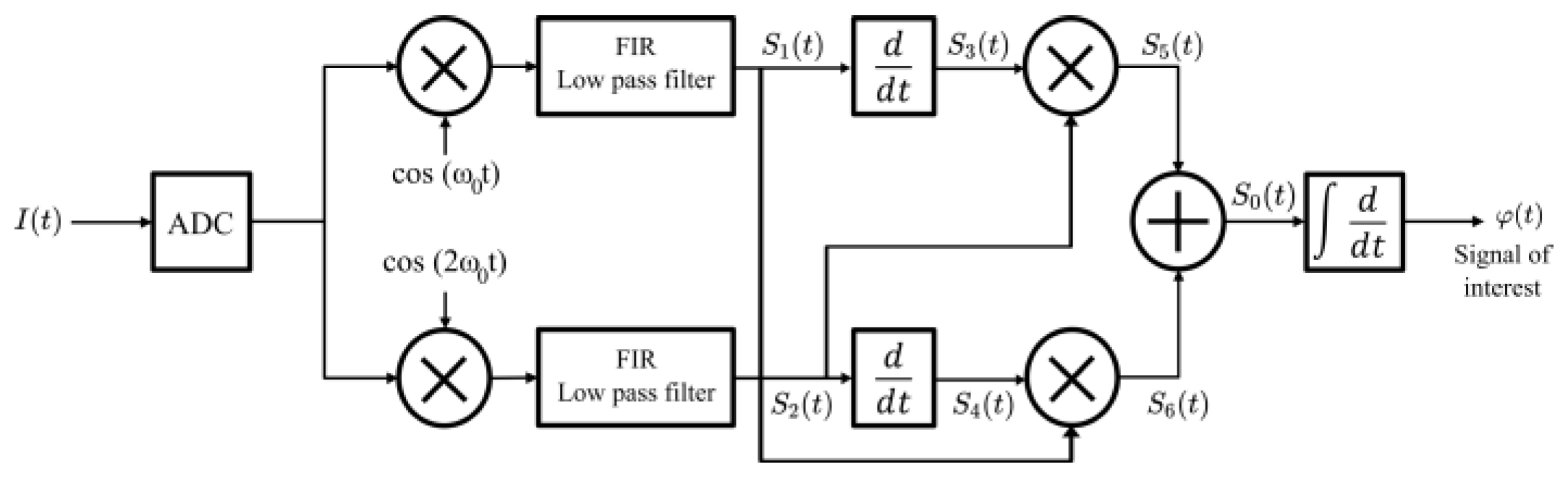
2.2. Demodulation Method
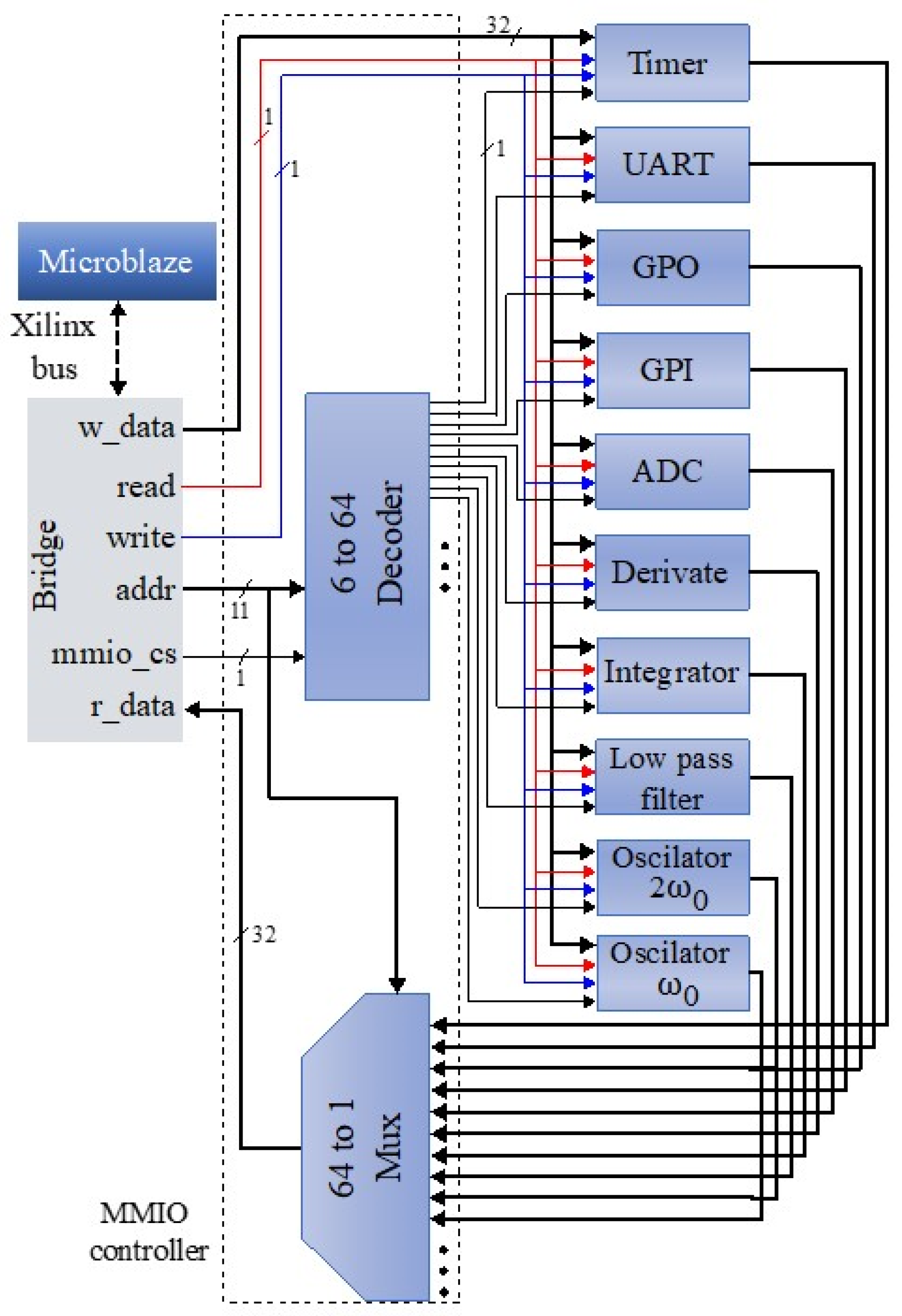
2.3. FPGA Design
- A 32-bit signal carrying the read data (r_data).
- A 32-bit signal carrying the write data (w_data).
- An 11-bit word address for the hardware module (addr).
- A 1-bit control signal to initiate a write operation (write).
- A 1-bit control signal to initiate a read operation (read).
- A 1-bit enable (chip select) signal to activate the MMIO system (mmio_cs).
- The microcontroller must communicate with other cores. This is accomplished by the interconnected structure of a bridge and a bus. The bridge converts the Xilinx microcontroller native bus signals into a simple synchronous bus protocol for the MMIO system (Figure 4).
2.3.1. Finite State Machine
2.3.2. Look-Up Table (LUT)
- A constructor that requires the address of the VHDL module.
- A writing method, which requires a 32-bit index as an input parameter.
- A read method, which receives the 32-bit data from the LUT as a result.
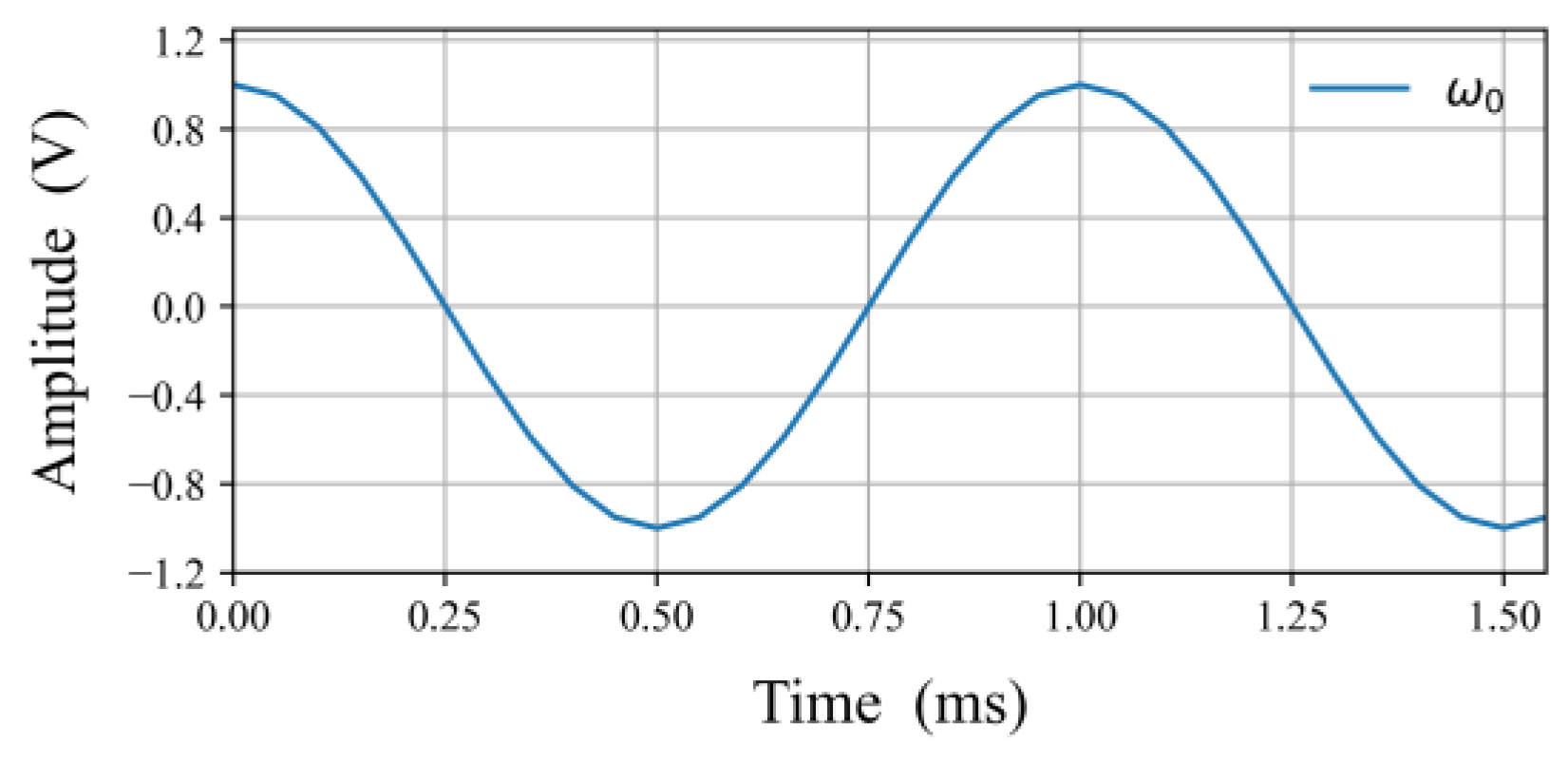
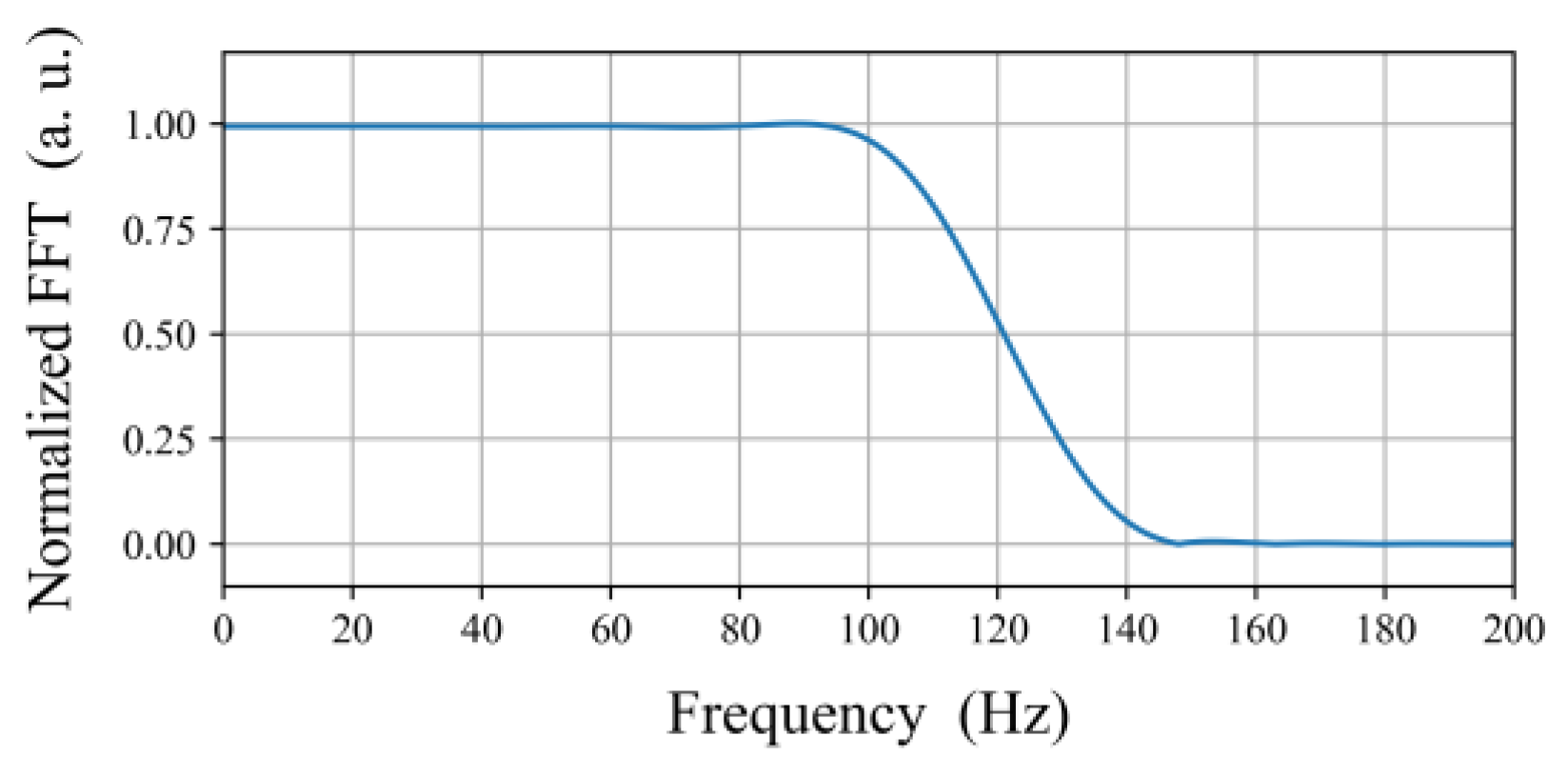
2.3.3. Low-Pass Filter
2.3.4. Derivative
2.3.5. Integrator
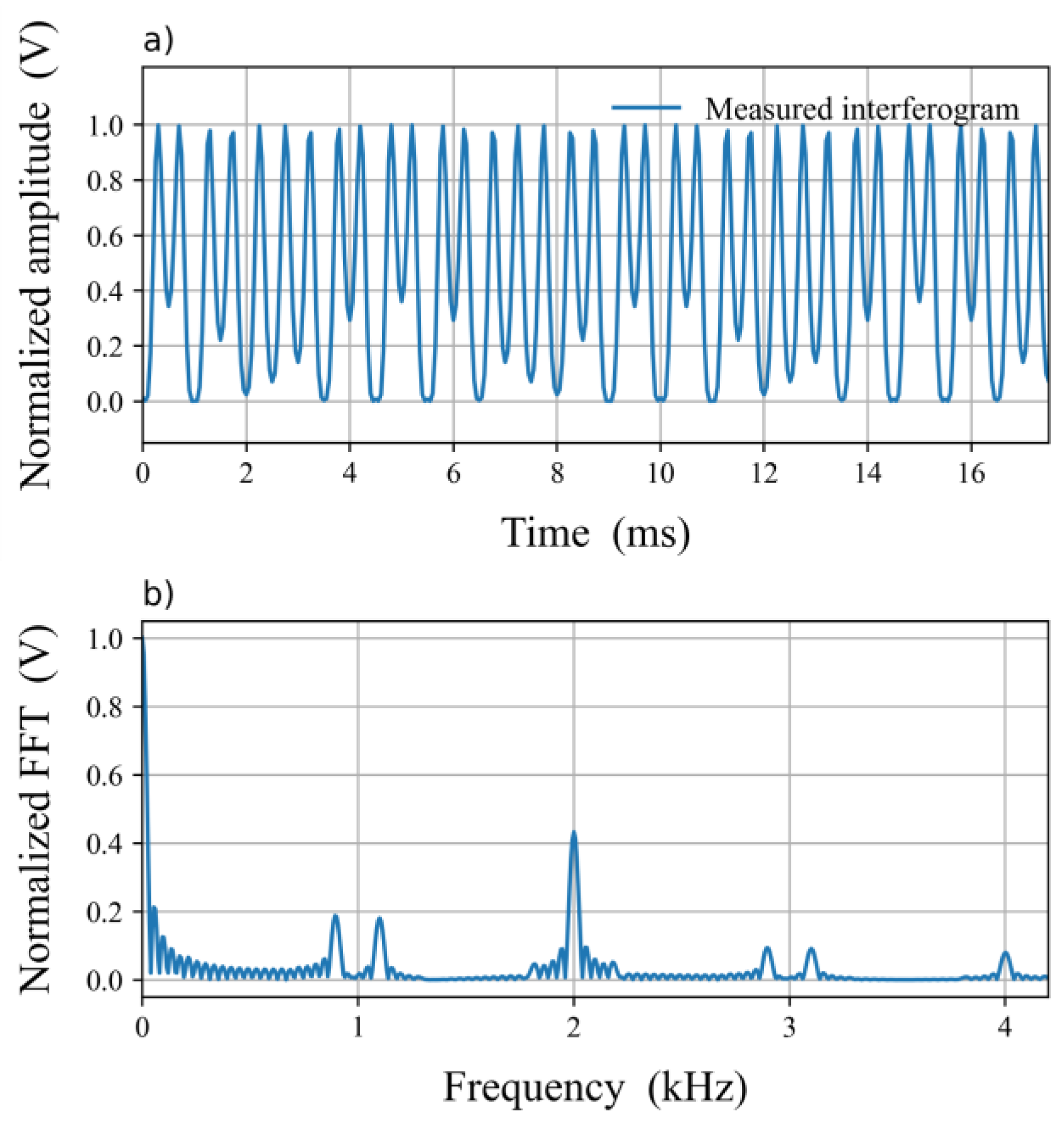
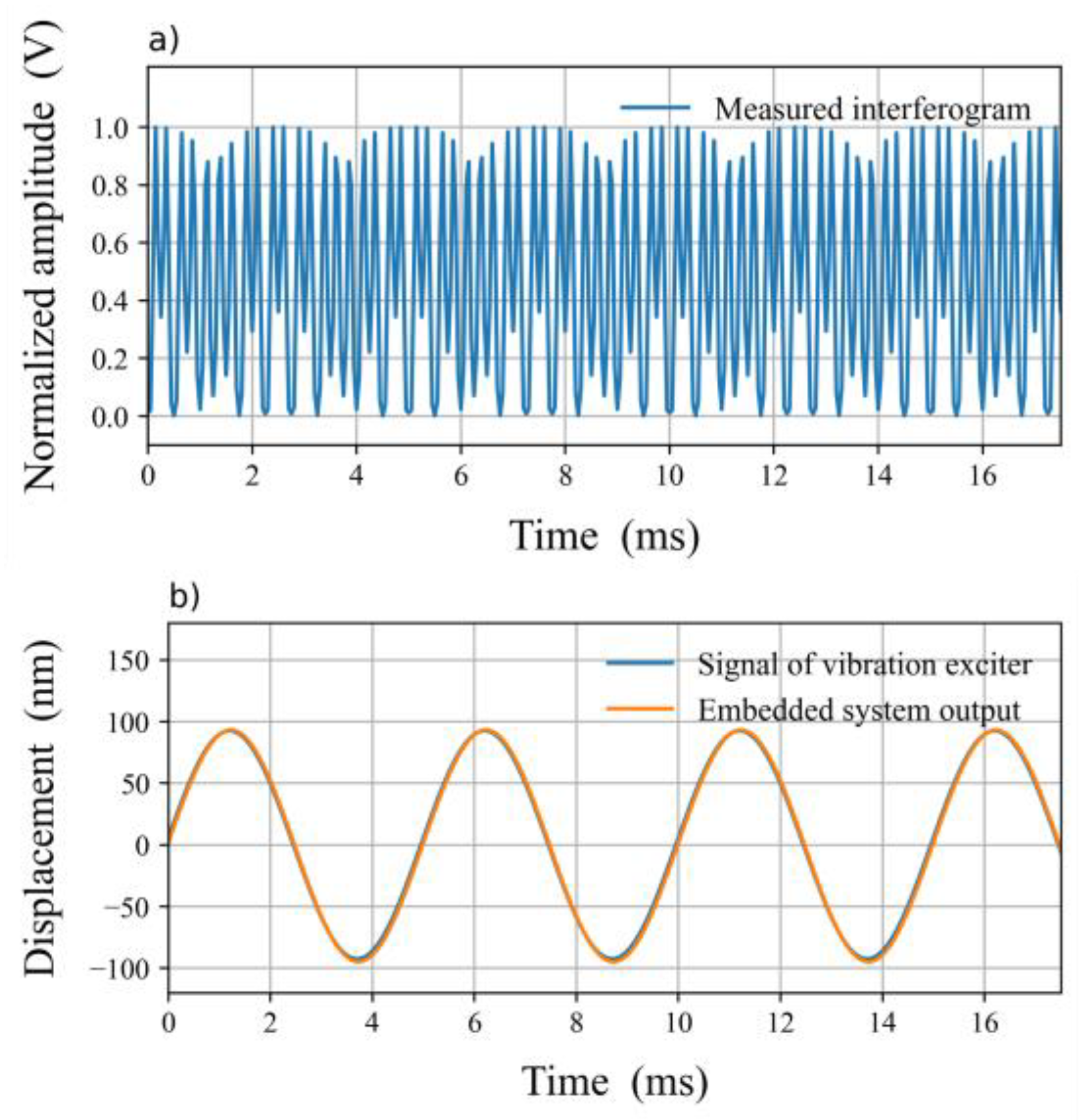
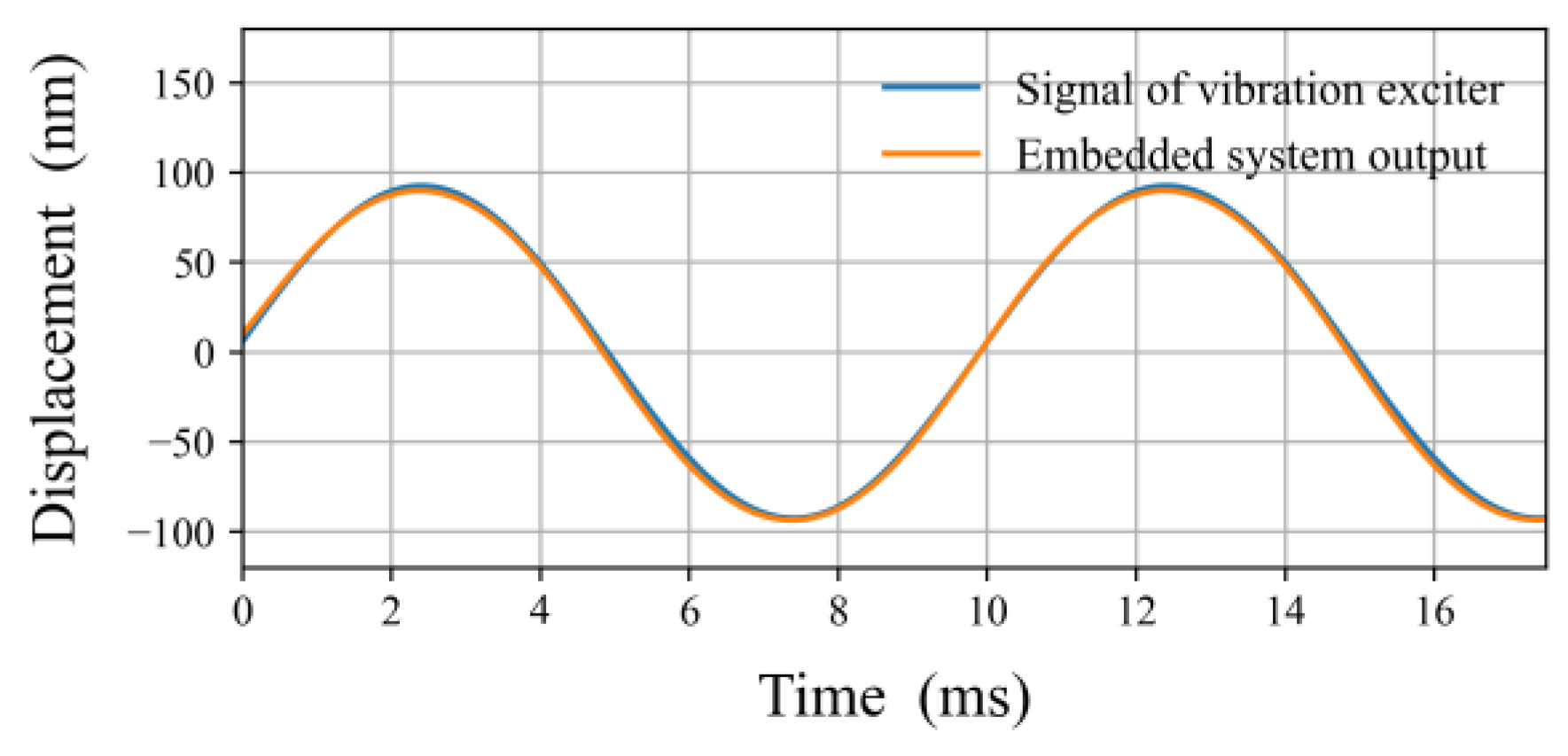
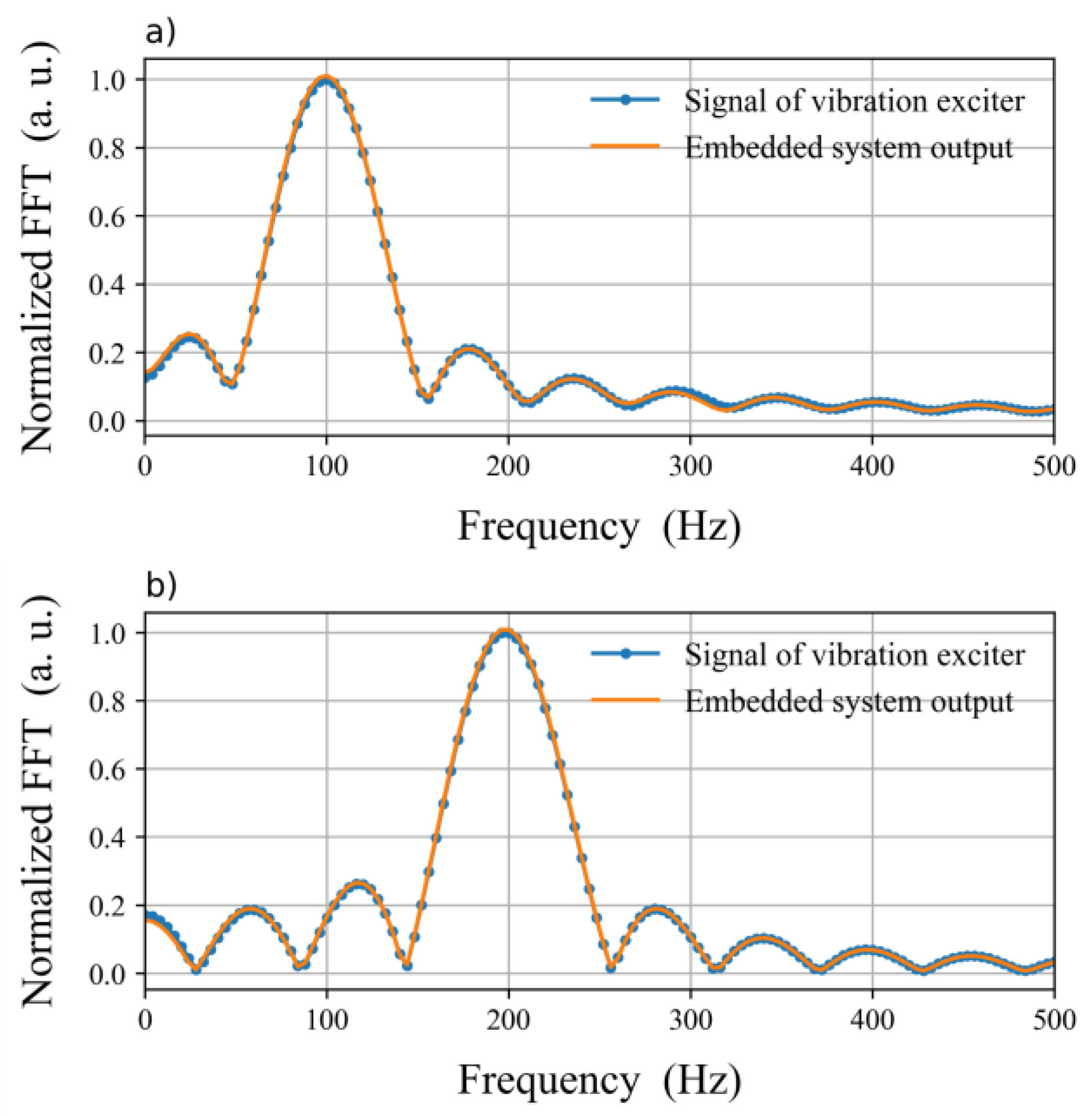
3. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kazieva, T.V.; Gubskiy, K.L.; Kuznetsov, A.P.; Reshetov, V.N. 3D push–pull heterodyne interferometer for SPM metrology. Appl. Opt. 2019, 58, 4000–4006. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, T.D.; Higuchi, M.; Vu, T.T.; Wei, D.; Aketagawa, M. 10-pm-order mechanical displacement measurements using heterodyne interferometry. Appl. Opt. 2020, 59, 8478–8485. [Google Scholar] [CrossRef] [PubMed]
- Yu, L.; Molnar, G.; Werner, C.A.; Weichert, C.; Koening, R.; Danzebrink, H.-U.; Tan, J.; Fluegge, J. Single beam 3DoF homodyne interferometer. Meas. Sci. Technol. 2020, 31, 084006. [Google Scholar] [CrossRef]
- Straube, G.; Fischer Calderón, J.S.; Ortlepp, I.; Füßl, R.; Manske, E. A Heterodyne Interferometer with Separated Beam Paths for High-Precision Displacement and Angular Measurements. Nanomanuf. Metrol. 2021, 4, 200–207. [Google Scholar] [CrossRef]
- Meggitt, B.T.; Hall, C.J.; Weir, K. An all fiber white light interferometric strain measurement system. Sens. Actuators A Phys. 2000, 79, 1–7. [Google Scholar] [CrossRef]
- Seat, H.C.; Ouisse, E.; Morteau, E.; Metivier, V. Vibration-displacement measurements based on a polarimetric extrinsic fiber Fabry–Perot interferometer. Meas. Sci. Technol. 2003, 14, 710–716. [Google Scholar] [CrossRef]
- Caldas, P.; Rego, G. Optical Fiber Interferometers Based on Arc-Induced Long Period Gratings at INESC TEC. Sensors 2021, 21, 7400. [Google Scholar] [CrossRef]
- Flores-Bravo, J.A.; Illarramendi, M.A.; Zubia, J.; Villatoro, J. Optical fiber interferometer for temperature-independent refractive index measuring over a broad range. Opt. Laser Technol. 2021, 139, 106977. [Google Scholar] [CrossRef]
- Malacara, D.; Servin, M.; Malacara, Z. Spatial Linear and Circular Carrier Analysis. In Interferogram Analysis for Optical Testing, 2nd ed.; CRC Press: Boca Raton, FL, USA; Taylor & Francis Group: Abingdon, VA, USA, 2005; pp. 426–430. [Google Scholar]
- Lee, B.H.; Kim, Y.H.; Park, K.S.; Eom, J.B.; Kim, M.J.; Rho, B.S.; Choi, H.Y. Interferometric Fiber Optic Sensors. Sensors 2012, 12, 2467–2486. [Google Scholar] [CrossRef]
- Yin, S.; Ruffin, P.B.; Yu, F.T.S. Fiber Optic Sensors, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Liang, H.; Wang, J.; Zhang, L.; Liu, J.; Wang, S. Review of Optical Fiber Sensors for Temperature, Salinity, and Pressure Sensing and Measurement in Seawater. Sensors 2022, 22, 5363. [Google Scholar] [CrossRef]
- Jackson, D.A.; Kersey, A.D.; Corke, M.; Jones, J.D.C. Pseudoheterodyne detection scheme for optical interferometers. Electron. Lett. 1982, 18, 1081–1083. [Google Scholar] [CrossRef]
- Cole, J.H.; Danver, B.A.; Bucaro, J.A. Synthetic-Heterodyne Interferometric Demodulation. IEEE Trans. Microw. Theory Tech. 1982, 30, 540–543. [Google Scholar] [CrossRef]
- Dandridge, A.; Tveten, A.; Giallorenzi, T. Homodyne demodulation scheme for fiber optic sensors using phase generated carrier. IEEE J. Quantum Electron. 1982, 18, 1647–1653. [Google Scholar] [CrossRef]
- Xilinx, Specifications Versal Architecture. 2022. Available online: https://www.xilinx.com/support/documentation/data_sheets/ds950-versal-overview.pdf (accessed on 10 January 2023).
- Monmasson, E.; Idkhajine, L.; Cirstea, M.N.; Bahri, I.; Tisan, A.; Naouar, M.W. FPGAs in industrial control applications. IEEE Trans. Industr. Inform. 2011, 7, 224–243. [Google Scholar] [CrossRef]
- Galeti, J.H.; Kitano, C.; Connelly, M.J. Improved synthetic-heterodyne Michelson interferometer vibrometer using phase and gain control feedback. Appl. Opt. 2015, 54, 10418–10424. [Google Scholar] [CrossRef]
- Connelly, M.J. Digital synthetic-heterodyne interferometric demodulation. J. Opt. 2002, 4, S400–S405. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, S.; Lufei, Z.; Fujii, Y. Nanometer-resolution displacement measurement system based on weak feedback effect of dual-frequency laser. Phys. Procedia 2009, 2, 19–26. [Google Scholar] [CrossRef]
- Vera-Salas, L.A.; Moreno-Tapia, S.V.; Garcia-Perez, A.; Romero-Troncoso, R.d.J.; Osornio-Rios, R.A.; Serroukh, I.; Cabal-Yepez, E. FPGA-Based Smart Sensor for Online Displacement Measurements Using a Heterodyne Interferometer. Sensors 2011, 11, 7710–7723. [Google Scholar] [CrossRef]
- Cui, K.; Li, S.; Ren, Z.; Zhu, R. A Highly Compact and Efficient Interrogation Controller Based on FPGA for Fiber-Optic Sensor Array Using Interferometric TDM. IEEE Sens. J. 2017, 17, 3490–3496. [Google Scholar] [CrossRef]
- Ehtesham, A.; Zabit, U.; Bernal, O.D.; Raja, G.; Bosch, T. Analysis and implementation of a direct phase unwrapping method for displacement measurement using self-mixing interferometry. IEEE Sens. J. 2017, 17, 7425–7432. [Google Scholar] [CrossRef]
- Yan, L.; Chen, Z.; Chen, B.; Xie, J.; Zhang, S.; Lou, Y.; Zhang, E. Precision PGC demodulation for homodyne interferometer modulated with a combined sinusoidal and triangular signal. Opt. Express 2018, 26, 4818–4831. [Google Scholar] [CrossRef]
- Elaskar, J.; Luda, M.A.; Tozzetti, L.; Codnia, J.; Oton, C.J. FPGA-Based High-Speed Optical Fiber Sensor Based on Multitone-Mixing Interferometry. IEEE Trans. Instrum. Meas. 2022, 71, 7003011. [Google Scholar] [CrossRef]
- STEMlab 125-14 Technical Specifications. Available online: https://redpitaya.com/stemlab-125-14/ (accessed on 10 January 2023).
- Mireles, J.; Sauceda, A.; Jiménez, A.; Ramos, M.; Gonzalez-Landaeta, R. Design and development of a MOEMS accelerometer using SOI technology. Micromechanics 2023, 14, 231. [Google Scholar] [CrossRef] [PubMed]
- Product Data: Vibration Exciter Type 4809 (BP-0231). Available online: https://www.bksv.com/-/media/literature/Product-Data/bp0231.ashx (accessed on 10 January 2023).
- Fischer, E.; Dalhoff, E.; Heim, S.; Hofbauer, U.; Tiziani, H.J. Absolute interferometric distance measurement using a FM-demodulation technique. Appl. Opt. 1995, 34, 5589–5594. [Google Scholar] [CrossRef] [PubMed]
- Vahid, F. Digital Design with RTL Design, Verilog and VHDL, 2nd ed.; John Wiley and Sons: Hoboken, NJ, USA, 2010; pp. 247–250. [Google Scholar]
- Chu, P.P. FPGA Prototyping by VHDL Examples: Xilinx MicroBlaze MCS SoC; John Wiley & Sons: Hoboken, NJ, USA, 2017; pp. 171–184. [Google Scholar]
- Potsangbam, J.; Kumar, M. Design and Implementation of Combined Pipelining and Parallel Processing Architecture for FIR and IIR filter Using VHDL. Int. J. VLSICS 2019, 10, 1–16. [Google Scholar] [CrossRef]
- Muanenda, Y.; Faralli, S.; Oton, C.J.; Cheng, C.; Yang, M.; Di Pasquale, F. Dynamic phase extraction in high-SNR DAS based on UWFBGs without phase unwrapping using scalable homodyne demodulation in direct detection. Opt. Express 2019, 27, 10644–10658. [Google Scholar] [CrossRef] [PubMed]
- Clement, J.; Maestre, H.; Torregrosa, G.; Fernández-Pousa, C.R. Incoherent Optical Frequency-Domain Reflectometry Based on Homodyne Electro-Optic Downconversion for Fiber-Optic Sensor Interrogation. Sensors 2019, 19, 2075. [Google Scholar] [CrossRef]
- Kumar, S.S.; Khansa, C.A.; Praveen, T.V.; Sreehari, C.V.; Santhanakrishnan, T.; Rajesh, R. Assessment of Dynamic Range in Interferometric Fiber Optic Hydrophones Based on Homodyne PGC Interrogator. IEEE Sens. J. 2020, 20, 13418–13425. [Google Scholar] [CrossRef]
- Bloom, Y.; Fields, I.; Maslennikov, A.; Rozenman, G.G. Quantum Cryptography—A Simplified Undergraduate Experiment and Simulation. Physics 2022, 4, 104–123. [Google Scholar] [CrossRef]
- Qiao, J.; Zhang, W.; Wang, Y.; Shao, Q.; Cai, J.; Zhao, H. Ultra-High SNR Demodulation Method for Optical Fiber Sensors Applied in Power Transformer Partial Discharge Detection. Sensors 2022, 22, 2828. [Google Scholar] [CrossRef]
- Liu, R.; Rozenman, G.G.; Kundu, N.K.; Chandra, D.; De, D. Towards the industrialisation of quantum key distribution in communication networks: A short survey. IET Quant. Comm. 2022, 3, 151–163. [Google Scholar] [CrossRef]
- Yuan, Y.; Li, J.; Zhu, Y.; Tian, S.; Zhu, Y.; Zhu, Z.; Zhang, X.; Jiang, F.; Dang, F.; Yang, J. A high-stable self-referenced PGC demodulation algorithm for fiber-optic interferometric sensor. Opt. Fiber Tech. 2023, 76, 103249. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Amplitude of Vibration (nm) | Target Frequency (Hz) | RMS Error (nm) | Max Error (nm) |
|---|---|---|---|
| 92.5 | 200 | 2.38 | 4.13 |
| 92.5 | 100 | 2.47 | 3.94 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiménez, A.; Sauceda, Á.; Muñoz, A.; Duarte, J.; Mireles, J., Jr. FPGA-Based Hardware Implementation of Homodyne Demodulation for Optical Fiber Sensors. Photonics 2023, 10, 258. https://doi.org/10.3390/photonics10030258
Jiménez A, Sauceda Á, Muñoz A, Duarte J, Mireles J Jr. FPGA-Based Hardware Implementation of Homodyne Demodulation for Optical Fiber Sensors. Photonics. 2023; 10(3):258. https://doi.org/10.3390/photonics10030258
Chicago/Turabian StyleJiménez, Abimael, Ángel Sauceda, Antonio Muñoz, José Duarte, and José Mireles, Jr. 2023. "FPGA-Based Hardware Implementation of Homodyne Demodulation for Optical Fiber Sensors" Photonics 10, no. 3: 258. https://doi.org/10.3390/photonics10030258
APA StyleJiménez, A., Sauceda, Á., Muñoz, A., Duarte, J., & Mireles, J., Jr. (2023). FPGA-Based Hardware Implementation of Homodyne Demodulation for Optical Fiber Sensors. Photonics, 10(3), 258. https://doi.org/10.3390/photonics10030258