
A New Control Method for Backlash Error Elimination of Pneumatic Control Valve

Abstract
:1. Introduction
2. Pneumatic Control Valve Model
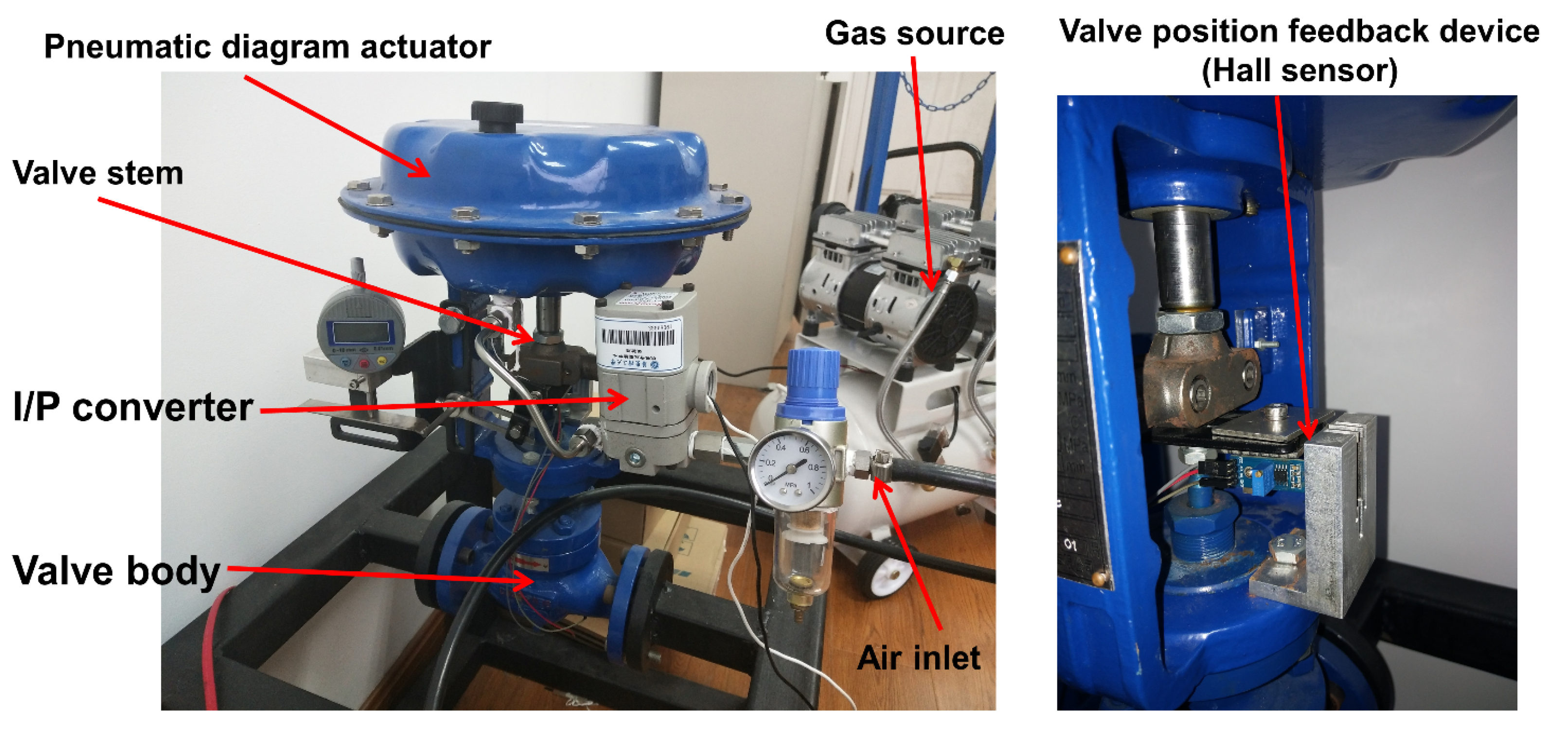
2.1. Experimental Equipment
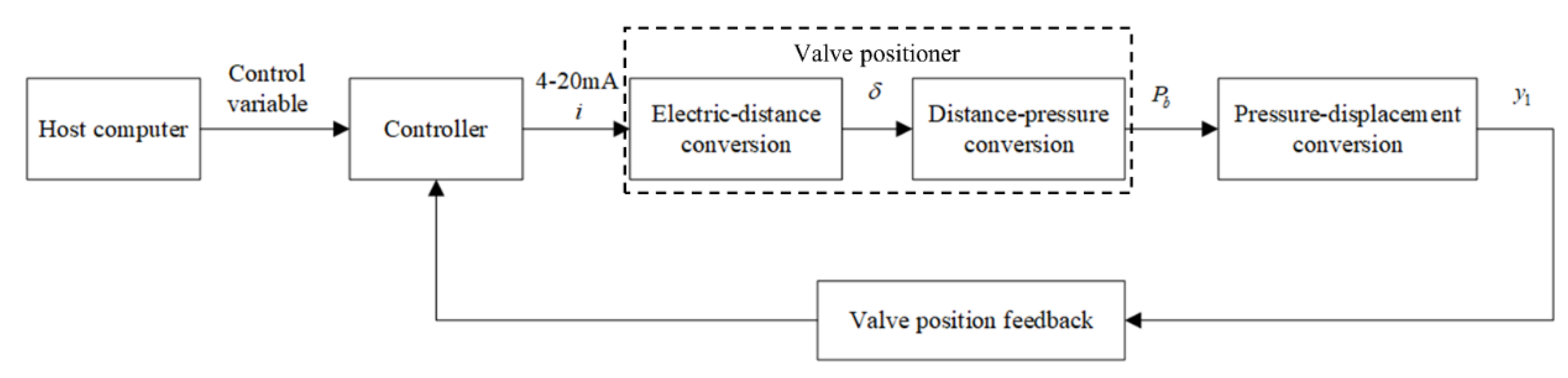
2.2. Physical Model
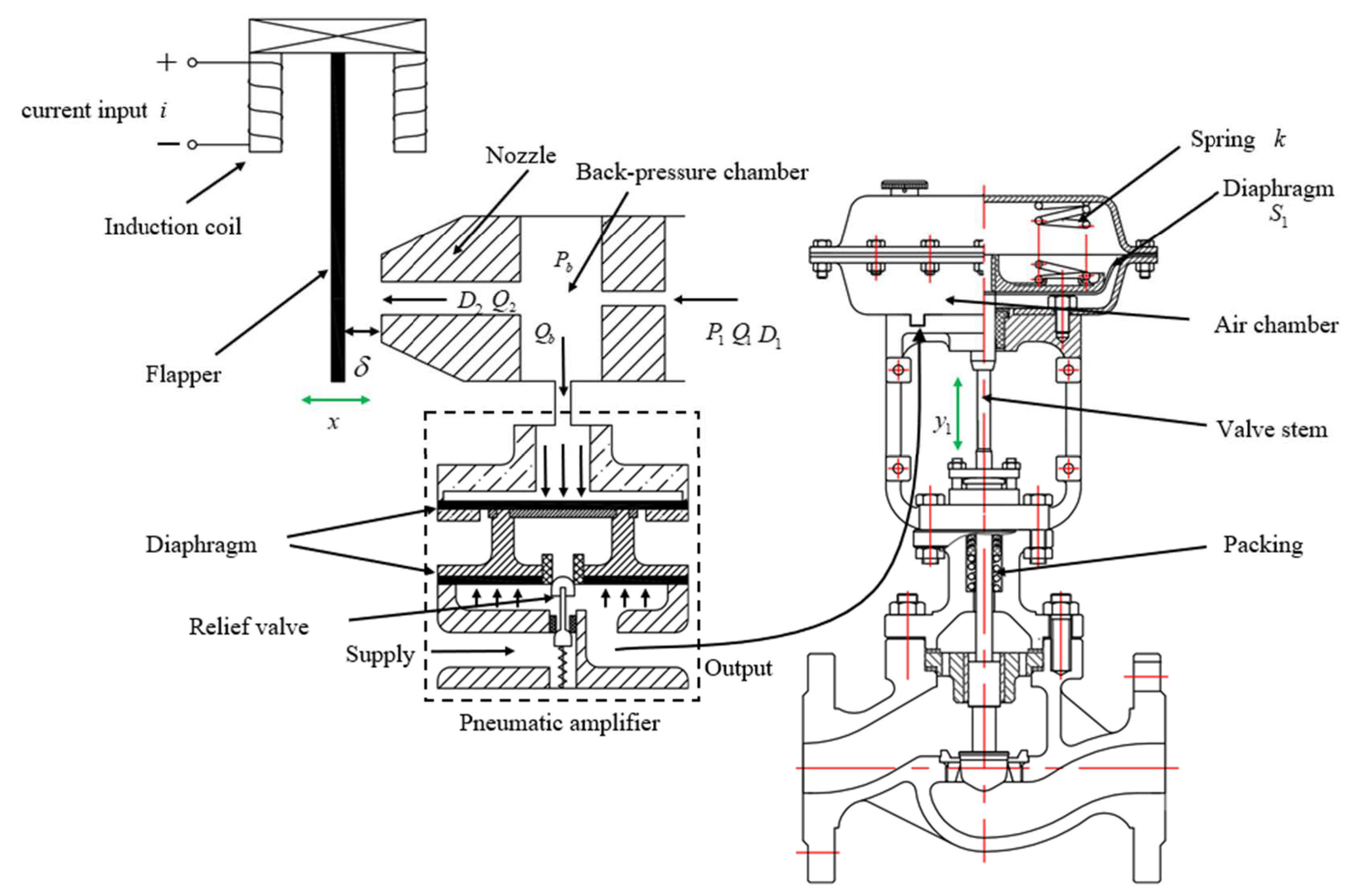
2.2.1. Pneumatic Diaphragm Actuator Model
2.2.2. Nozzle-Flapper Structure Model
- (1)
- When , , that is, when the distance between the nozzle and the baffle is 0, the output air pressure of the back-pressure chamber is equal to the input air pressure of the nozzle baffle mechanism;
- (2)
- When gradually increases, approaches 0, that is, the output pressure of the back-pressure chamber is almost equal to the atmospheric pressure. According to the mechanism analysis of the nozzle baffle mechanism, the nozzle is equivalent to variable air resistance, which is connected in series with the constant air resistance corresponding to the constant orifice. As the gap increases, the variable air resistance value decreases. According to the principle of partial pressure, the constant air resistance partial pressure (formula (13)) in the gas path increases, and the variable air resistance partial pressure (formula (14)) decreases, and finally approaches zero, that is, approaches zero. The mechanism analysis result of the nozzle baffle mechanism is consistent with the numerical analysis result of formula (16). Based on the above analysis, the derivation of formula (16) is correct.
2.2.3. Electromagnetic Model
2.2.4. Model Integration
3. Control Method
4. Valve Position Control Experiment
5. Conclusions
- (1)
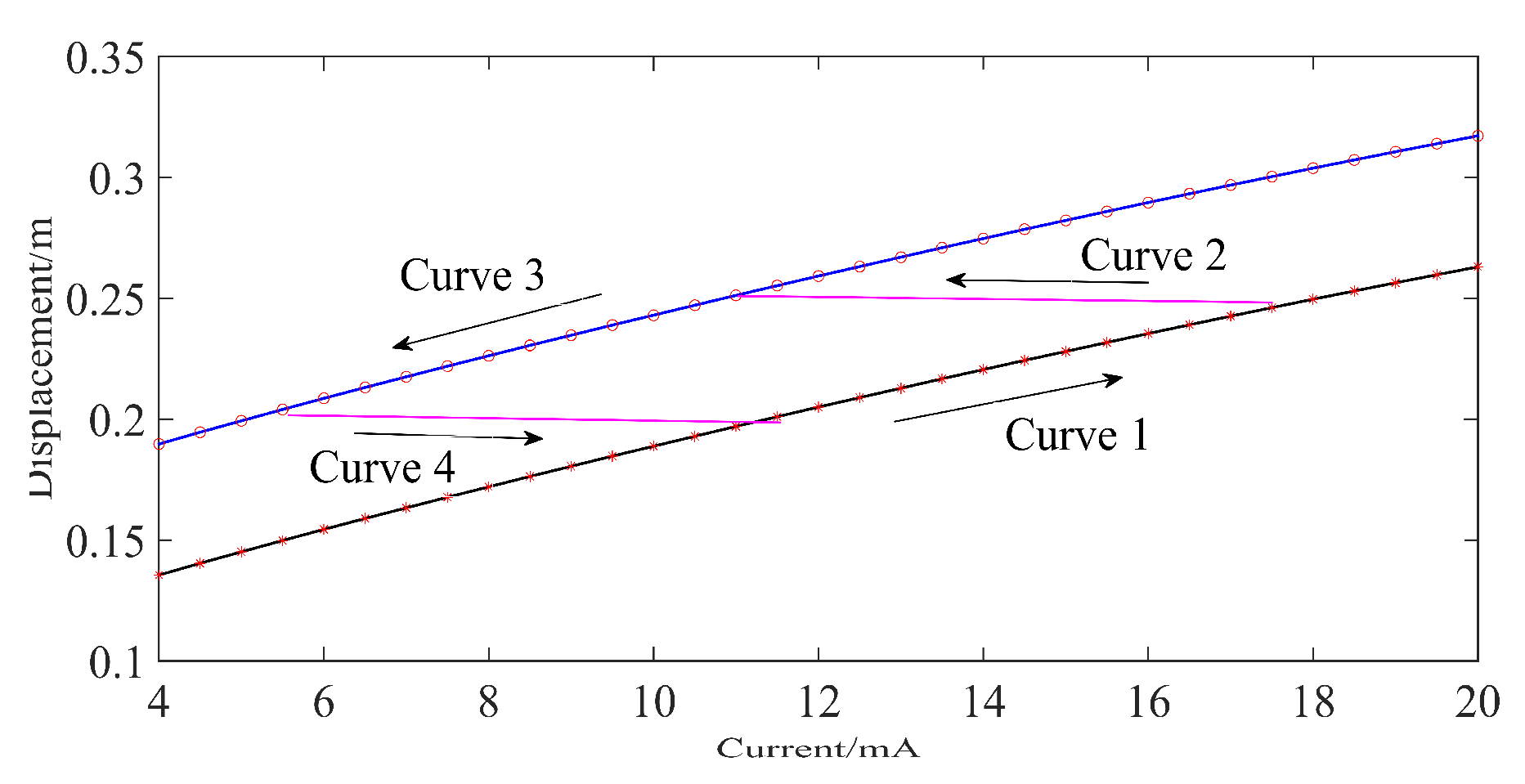
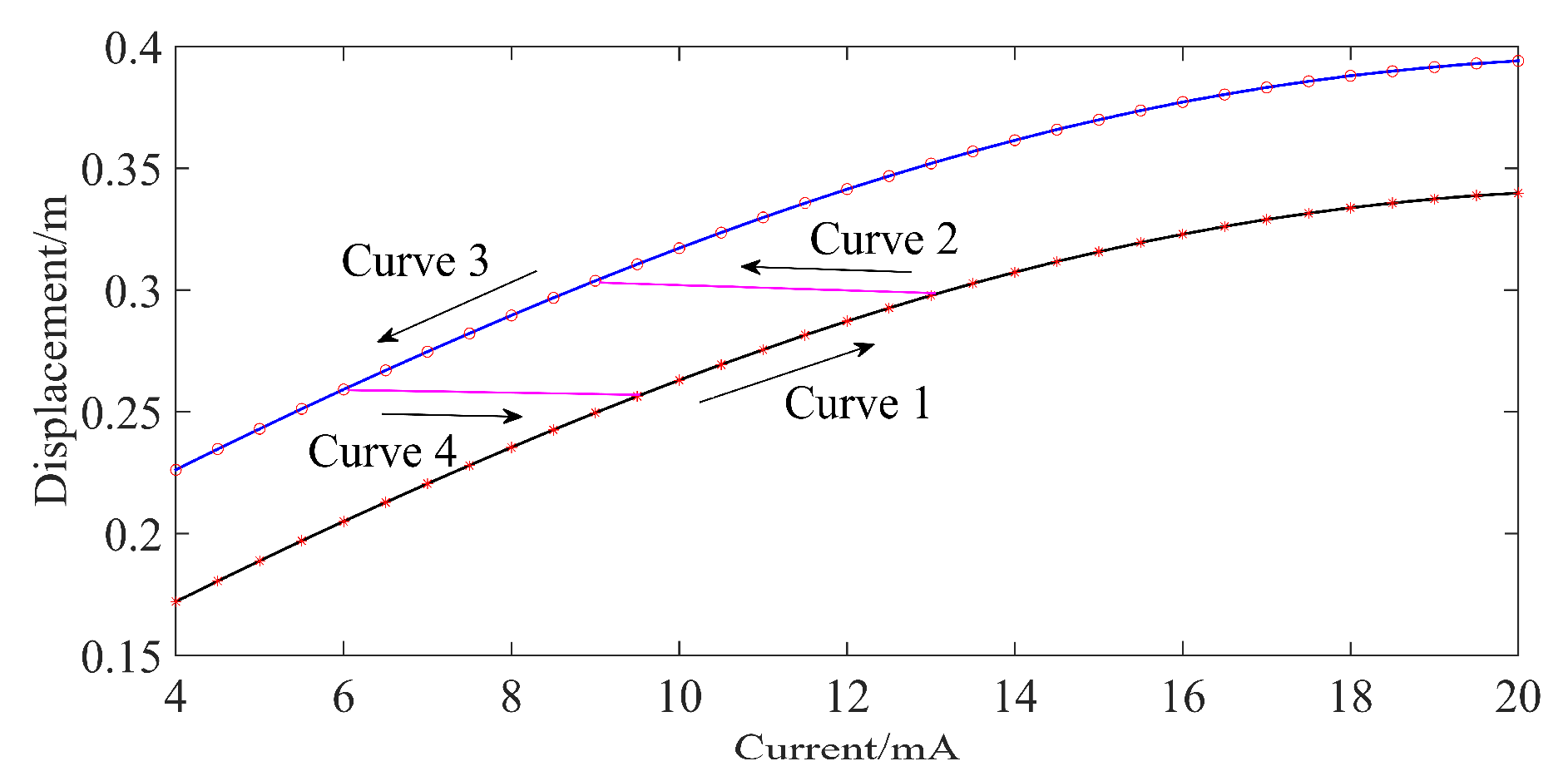
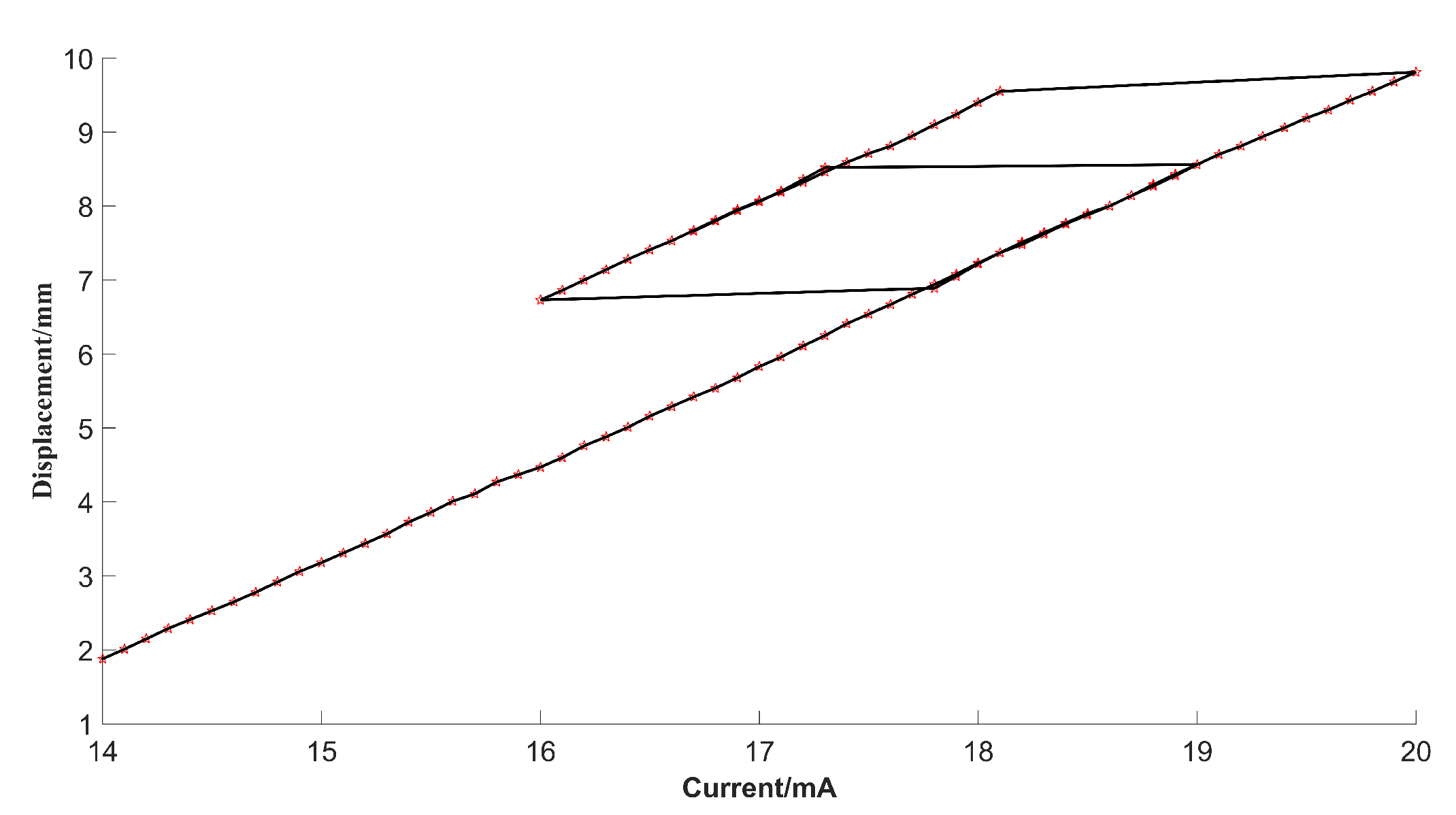
- The physical model of the commonly used pneumatic control valve is established in this paper, including the pneumatic diaphragm actuator model, nozzle-flapper structure model, and electromagnetic model. It is shown that the backlash error existing in the pneumatic control valve is related to the friction according to the physical model. In addition, the relationship between the input current and valve stem displacement can be calculated based on the physical model, and the experimental result is consistent with the model calculation results, which shows that the established physical model is correct.
- (2)
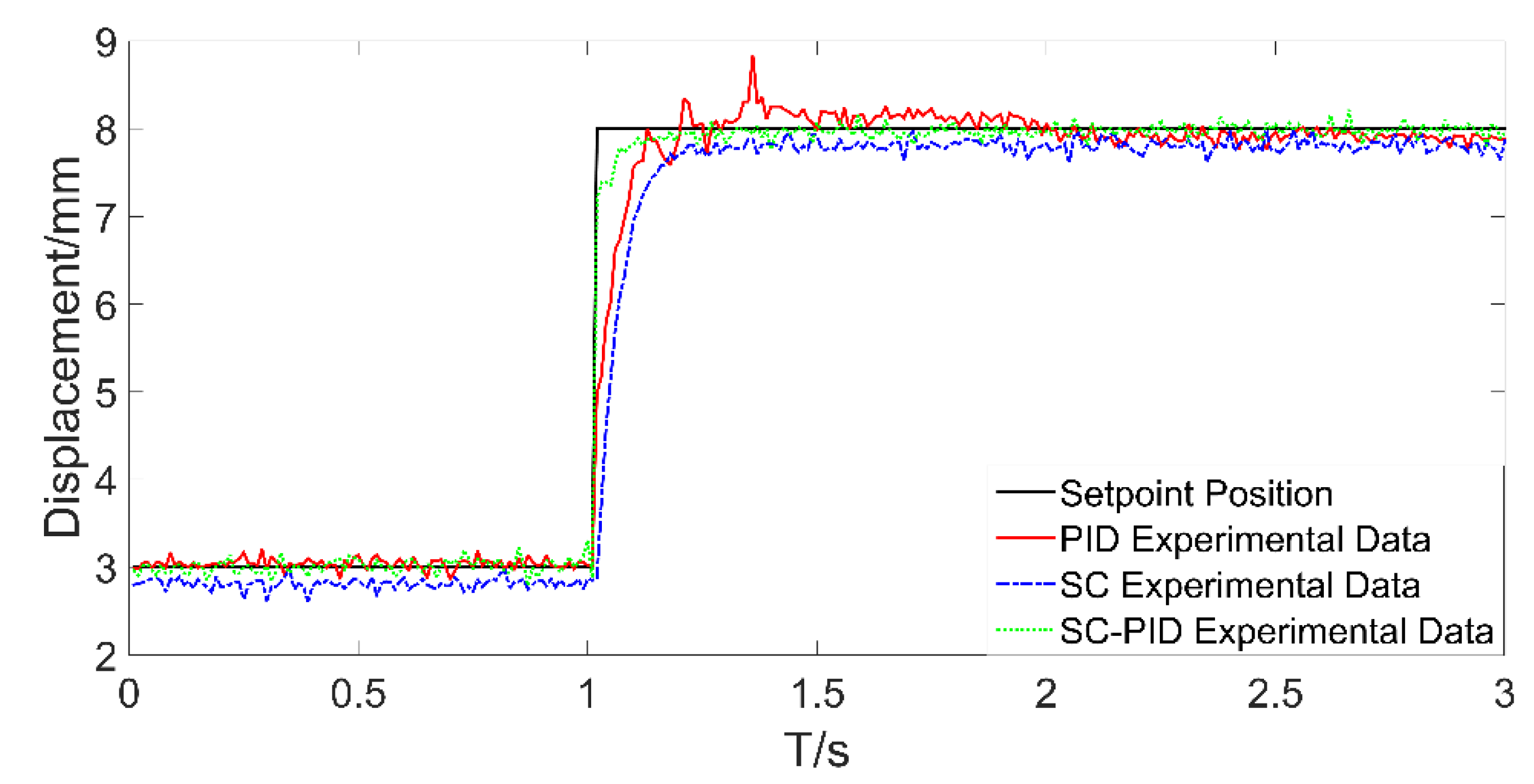
- To deal with the valve stem oscillation caused by the backlash error during valve control, the SC-PID control method is proposed. Compared with other algorithms, the proposed algorithm is simpler, valve position control faster, and control effect better.
- (3)
- During the control of the pneumatic control valve, the disturbance caused by the flow of medium in the pipeline is inevitable and cannot be ignored. The dynamic characteristics of the control system under load disturbance will be analyzed in future work.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qiu, C.; Jiang, C.-H.; Zhang, H.; Wu, J.-Y.; Jin, Z.-J. Pressure Drop and Cavitation Analysis on Sleeve Regulating Valve. Processes 2019, 7, 829. [Google Scholar] [CrossRef] [Green Version]
- Ale Mohammad, M.; Huang, B. Compensation of control valve stiction through controller tuning. J. Process Control 2012, 22, 1800–1819. [Google Scholar] [CrossRef]
- Riccardo, B.D.C.; Vaccari, M.; Pannocchia, G. Model predictive control design for multivariable processes in the presence of valve stiction. J. Process Control 2018, 71, 25–34. [Google Scholar]
- Di Capaci, R.B.; Scali, C. Review and comparison of techniques of analysis of valve stiction: From modeling to smart diagnosis. Chem. Eng. Res. Des. 2018, 130, 230–265. [Google Scholar] [CrossRef]
- Choudhury, M.S.; Thornhill, N.F.; Shah, S.L. Modelling valve stiction. Control Eng. Pract. 2005, 13, 641–658. [Google Scholar] [CrossRef] [Green Version]
- Hidalgo, M.C.; Garcia, C. Friction compensation in control valves: Nonlinear control and usual approaches. Control Eng. Pract. 2017, 58, 42–53. [Google Scholar] [CrossRef]
- Armstrong-Hélouvry, B.; Dupont, P.; De Wit, C.C. A survey of models, analysis tools and compensation methods for the control of machines with friction—ScienceDirect. Automatica 1994, 30, 1083–1138. [Google Scholar] [CrossRef]
- Pennestrì, E.; Rossi, V.; Salvini, P.; Valentini, P.P. Review and comparison of dry friction force models. Nonlinear Dyn. 2016, 83, 1785–1801. [Google Scholar] [CrossRef]
- Carneiro, J.F.; de Almeida, F.G. LuGre Friction Model: Application to a Pneumatic Actuated System. Lect. Notes Electr. Eng. 2015, 321, 459–468. [Google Scholar]
- Meng, D.; Tao, G.; Liu, H.; Zhu, X. Adaptive robust motion trajectory tracking control of pneumatic cylinders with LuGre model-based friction compensation. Chin. J. Mech. Eng. 2014, 27, 802–815. [Google Scholar] [CrossRef]
- Carducci, G.; Giannoccaro, N.I.; Messina, A.; Rollo, G. Identification of viscous friction coefficients for a pneumatic system model using optimization methods. Math. Comput. Simul. 2006, 71, 385–394. [Google Scholar] [CrossRef]
- Li, X.; Chen, S.L.; Teo, C.S.; Tan, K.K.; Lee, T.H. Data-Driven Modeling of Control Valve Stiction Using Revised Binary-Tree Structure. Ind. Eng. Chem. Res. 2015, 54, 330–337. [Google Scholar] [CrossRef]
- Wang, G.; Wang, J. Quantification of valve stiction for control loop performance assessment. In Proceedings of the 16th International Conference on Industrial Engineering and Engineering Management, Beijing, China, 21–23 October 2009. [Google Scholar]
- Choudhury, M.S.; Thornhill, N.F.; Shah, S.L. A Data-Driven Model for Valve Stiction. IFAC Proc. Vol. 2004, 37, 245–250. [Google Scholar] [CrossRef] [Green Version]
- He, Q.P.; Wang, J.; Pottmann, M.; Qin, S.J. A Curve Fitting Method for Detecting Valve Stiction in Oscillating Control Loops. Ind. Eng. Chem. Res. 2007, 46, 4549–4560. [Google Scholar] [CrossRef]
- Fang, L.; Tang, L.; Wang, J.; Shang, Q. A semi-physical model for pneumatic control valves. Nonlinear Dyn. 2016, 85, 1–14. [Google Scholar] [CrossRef]
- Tang, L.; Fang, L.; Wang, J.; Shang, Q. Modeling and Identification for Pneumatic Control Valves with Stiction. IFAC Pap. 2015, 48, 1244–1249. [Google Scholar] [CrossRef]
- He, Q.P.; Wang, J. Valve Stiction Quantification Method Based on a Semiphysical Valve Stiction Model. Ind. Eng. Chem. Res. 2014, 53, 12010–12022. [Google Scholar] [CrossRef]
- Han, K.H.; Koh, G.O.; Sung, J.M.; Kim, B.S. An Adaptive Control Approach for Improving Control Systems with Unknown Backlash. Int. J. Aeronaut. Space Sci. 2011, 12, 360–364. [Google Scholar] [CrossRef]
- Voeroes, J. Identification of cascade systems with backlash. Int. J. Control 2010, 83, 1117–1124. [Google Scholar] [CrossRef]
- Voeroes, J. Identification of nonlinear dynamic systems with input saturation and output backlash using three-block cascade models. J. Frankl. Inst. 2014, 351, 5455–5466. [Google Scholar] [CrossRef]
- Voeroes, J. Modeling and Identification of Nonlinear Cascade and Sandwich Systems with General Backlash. J. Electr. Eng. 2014, 65, 104–110. [Google Scholar]
- Zhou, J.; Wen, C.; Zhang, C.; Shen, X. Adaptive Output Control of Uncertain Nonlinear Systems with Unknown Backlash. In Proceedings of the American Control Conference (ACC), New York, NY, USA, 9–13 July 2007. [Google Scholar]
- Tao, G.; Kokotovic, P.V. Adaptive control of systems with backlash. Automatica 1993, 29, 323–335. [Google Scholar] [CrossRef]
- Mazenc, F.; Andrieu, V.; Malisoff, M. Design of continuous–discrete observers for time-varying nonlinear systems. Automatica 2015, 57, 135–144. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.; Zhang, C.; Wen, C. Robust Adaptive Output Control of Uncertain Nonlinear Plants With Unknown Backlash Nonlinearity. IEEE Trans. Autom. Control 2007, 52, 503–509. [Google Scholar] [CrossRef]
- Li, X.; Yao, J.; Zhou, C. Adaptive Robust Control for Backlash Nonlinearity with Extended State Observer. In Proceedings of the 35th Chinese Control Conference, Chengdu, China, 27–29 July 2016; pp. 4579–4584. [Google Scholar]
- Zhang, D.X.; Jia, J.Y.; Guo, Y.X. Neural Network Sliding Mode Control Approach to Backlash and Friction Compensation. J. Univ. Electron. Sci. Technol. China 2018, 37, 793–796. [Google Scholar]
- Lyu, Z.; Liu, Z.; Xie, K.; Chen, C.P.; Zhang, Y. Adaptive Tracking Control for Switched Nonlinear Systems with Fuzzy Actuator Backlash. Fuzzy Sets Syst. 2020, 385, 60–80. [Google Scholar] [CrossRef]
- Di Capaci, R.B.; Scali, C.; Pestonesi, D.; Bartaloni, E. Advanced Diagnosis of Control Loops: Experimentation on Pilot Plant and Validation on Industrial Scale. IFAC Proc. Vol. 2013, 46, 589–594. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Q.; Liu, Z.; Jiang, A.; Jiang, E.; Xiao, Y.; Li, F.; Jiang, J. Research on control algorithm of intelligent valve positioner based on parameter self-tuning. In Proceedings of the 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020. [Google Scholar]
- Kayihan, A.; Doyle, F.J. Friction compensation for a process control valve. Control Eng. Pract. 2000, 8, 799–812. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pneumatic Diaphragm Actuator (ZJHP-16C) | Nominal pressure/MPa | 1.6 |
| Signal pressure/MPa | 0.08–0.24 | |
| Flow characteristics | Equal percentage | |
| I/P Converter (T-1000 961-075-000) | Input signal /mA | 4–20 |
| Maximum supply pressure/MPa | 0.7 | |
| Pressure output/MPa | 0.04–0.21 |
| Parameter | Value/Unit |
|---|---|
| Mass of stem | |
| Spring constant | |
| Diaphragm area | |
| Input gas pressure | |
| Viscous friction coefficient | |
| Coulomb friction | |
| Magnetic path length | |
| Maximum gap of nozzle baffle | |
| Orifice flow coefficient | 0.75 |
| Nozzle flow coefficient | 0.7 |
| Supply voltage | |
| Orifice diameter | |
| Nozzle diameter | |
| Coil turns | 24,000 |
| Magnetic flux leakage coefficient | 4.2 |
| Magnetic area |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, H.; Li, Y.; Zhang, L. A New Control Method for Backlash Error Elimination of Pneumatic Control Valve. Processes 2021, 9, 1378. https://doi.org/10.3390/pr9081378
Xu H, Li Y, Zhang L. A New Control Method for Backlash Error Elimination of Pneumatic Control Valve. Processes. 2021; 9(8):1378. https://doi.org/10.3390/pr9081378
Chicago/Turabian StyleXu, Haiming, Yong Li, and Lanzhu Zhang. 2021. "A New Control Method for Backlash Error Elimination of Pneumatic Control Valve" Processes 9, no. 8: 1378. https://doi.org/10.3390/pr9081378
APA StyleXu, H., Li, Y., & Zhang, L. (2021). A New Control Method for Backlash Error Elimination of Pneumatic Control Valve. Processes, 9(8), 1378. https://doi.org/10.3390/pr9081378