
An Intelligent Optimized Route-Discovery Model for IoT-Based VANETs

 , , , , ,
, , , , ,  and
and
Abstract
1. Introduction
- We introduced a novel optimization algorithm based on the behavior of Java macaque monkeys for balancing a search operation. The balance is achieved by modeling the natural behavior of Java macaques in terms of multi-group behavior, multiple search agents, social hierarchy-based selection strategy, mating, male replacement, and learning process.
- A multi-group population with multiple search agents of male and female monkeys helps with the exploration of different search spaces and in maintaining diversity.
- This algorithm uses the dominance hierarchy-based mating process for exploring complex search spaces.
- To address communication issues in a multi-group population, Java monkeys have a unique behavior called male replacement.
- The exploitation phase of the proposed algorithm is achieved by the learning process.
- This algorithm uses the multileader approach for male and female search agents such as alpha male and female in each group, and maintains the global best male and female agents. Thus, the multileader approach assists in the smooth transition from exploration phase to exploitation phase [12]. Furthermore, the social hierarchical-based selection strategy improves the maintenance of both converged and diverse monkeys in each group, as well as in the population.
2. Related Work
3. Preliminaries and Background
3.1. Initialization Phase
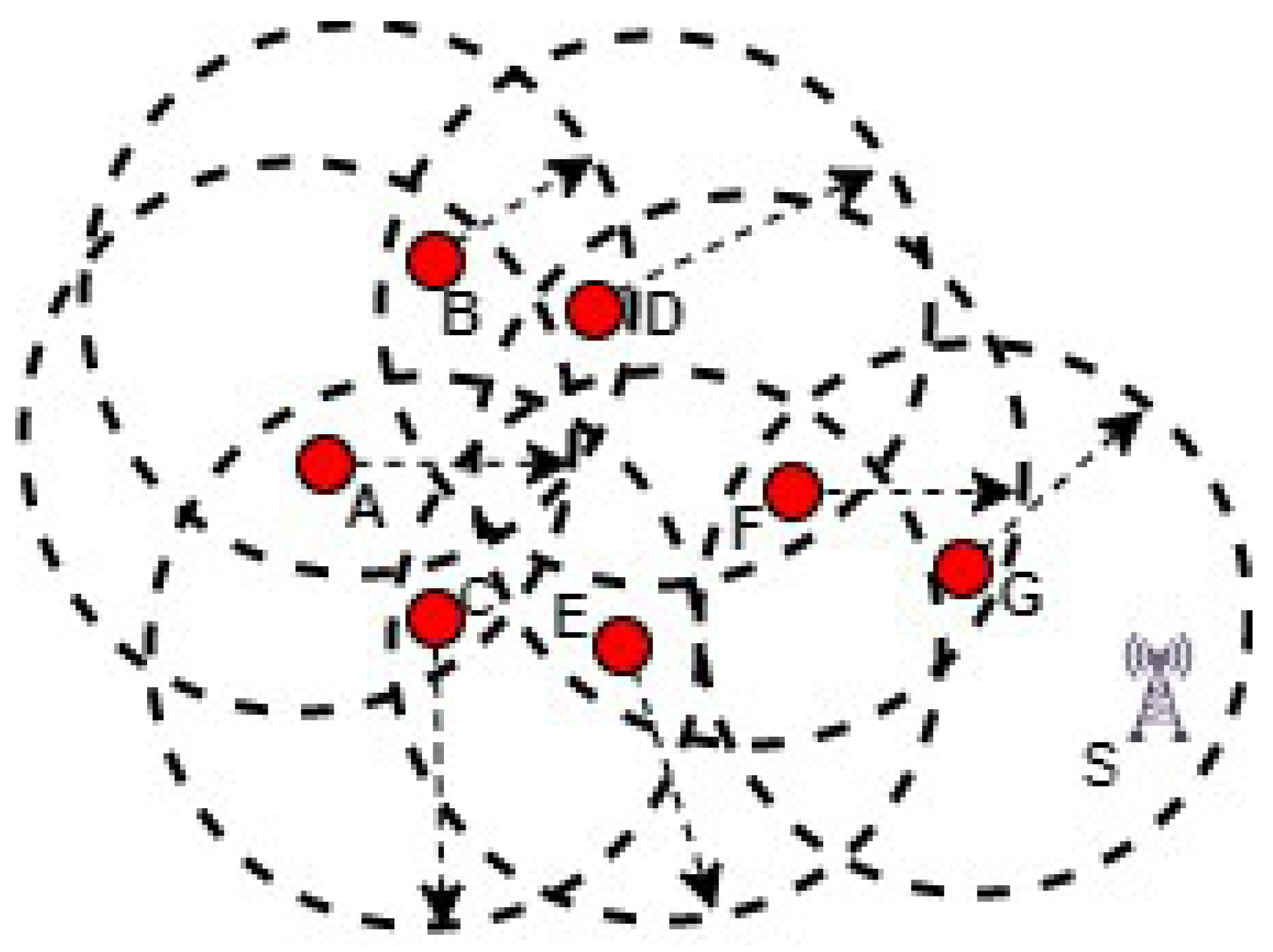
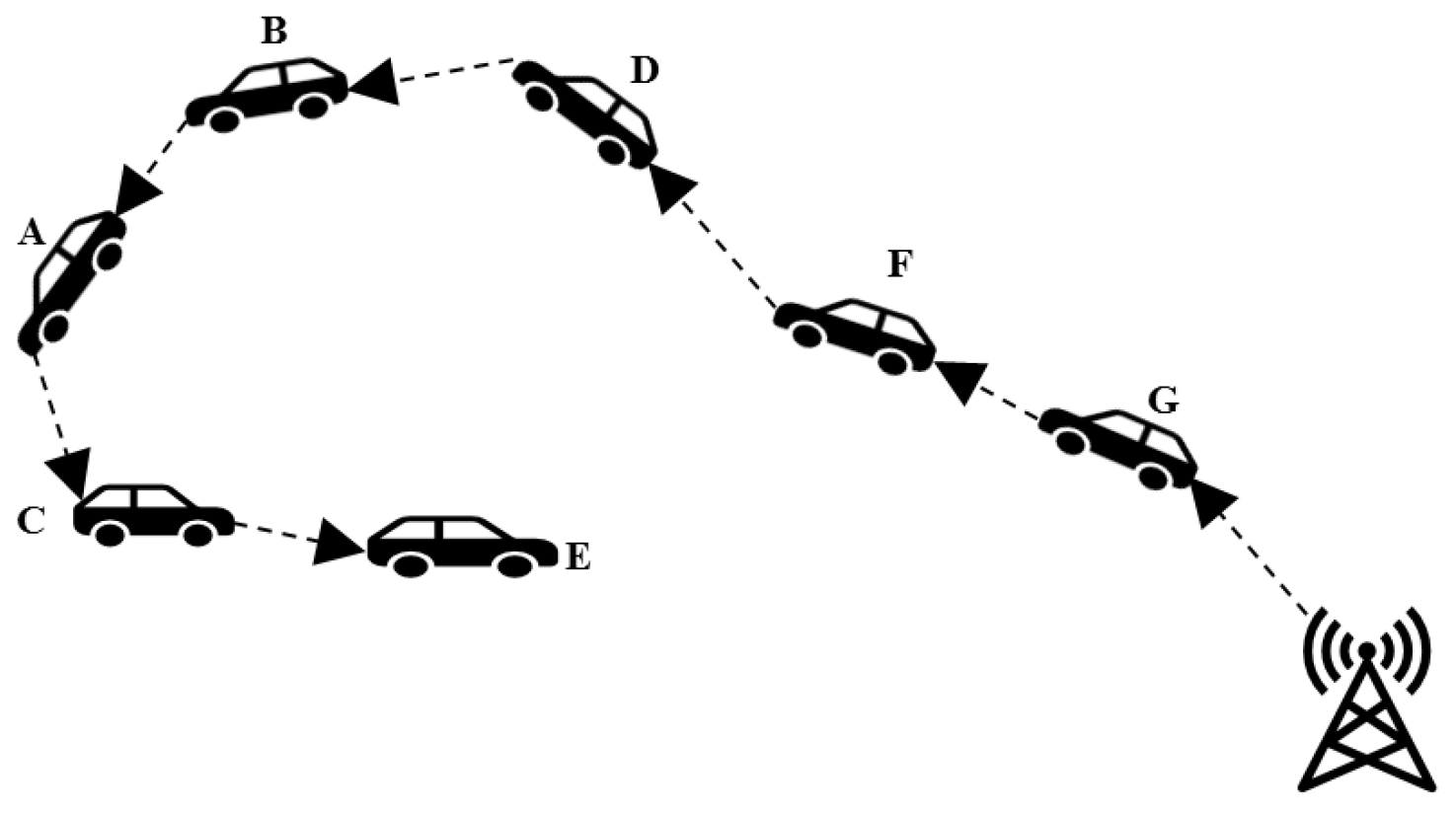
3.2. Route-Discovery Phase
3.3. Route Maintenance Phase
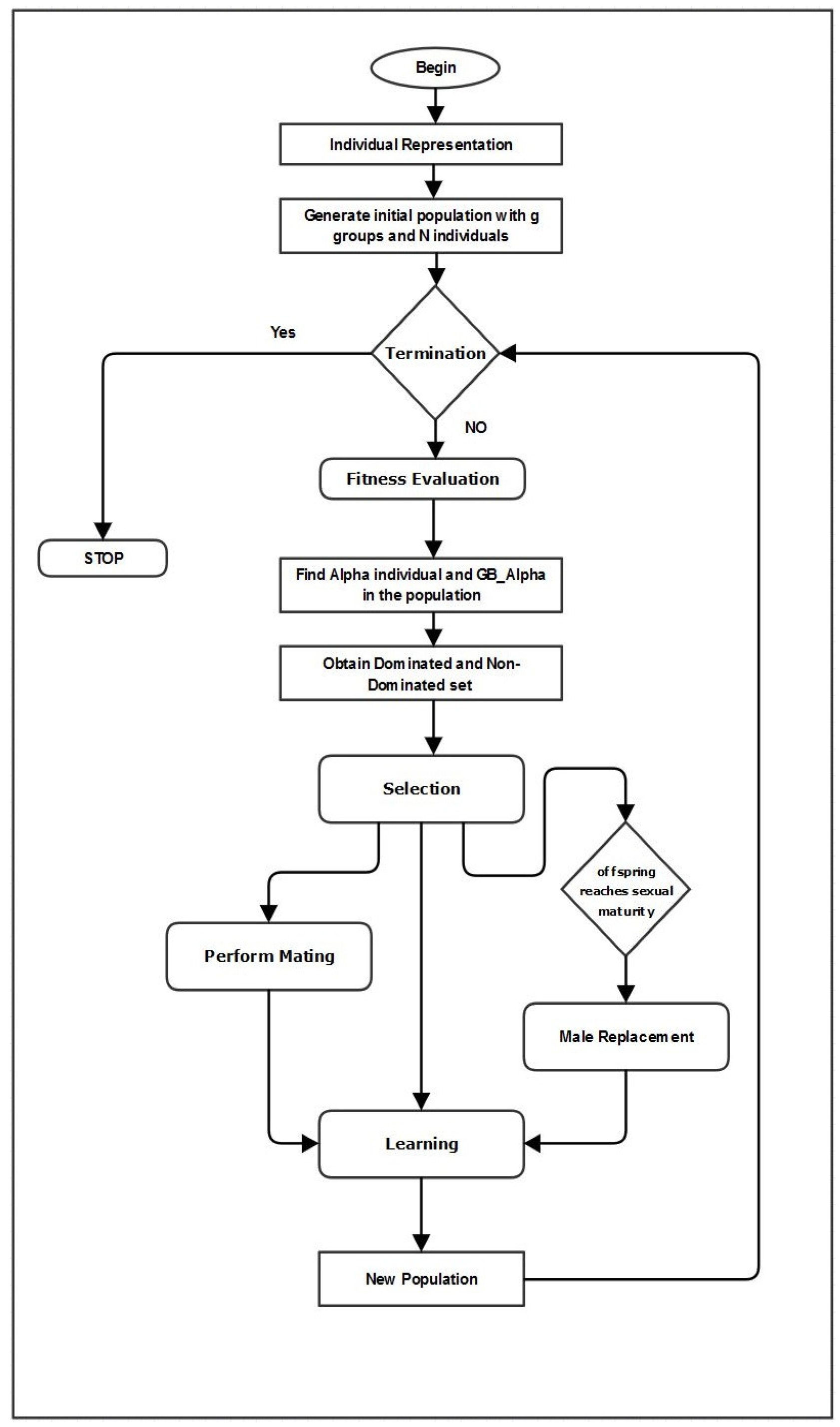
4. Algorithm Modeling for VANET
4.1. Population Initialization
| Algorithm 1 Initialization. |
|
| Algorithm 2 Classification of Population. |
|
4.2. Categorization of the Individuals
4.3. Mating Process
| Algorithm 3 Mating Process. |
|
| Algorithm 4 Evaluate Maturity of Offspring. |
|
4.4. Male Replacement
| Algorithm 5 Male Replacement. |
|
| Algorithm 6 Learning Process. |
|
4.5. Learning
| Algorithm 7 JMAD: Java Macaque Algorithm for Discrete Optimization. |
|
5. Proposed Algorithm for Intelligent Route Discovery in IoT-Based VANET
6. Experimentation and Result Analysis
6.1. Dataset Creation
6.2. Results Based on Parameter Tuning
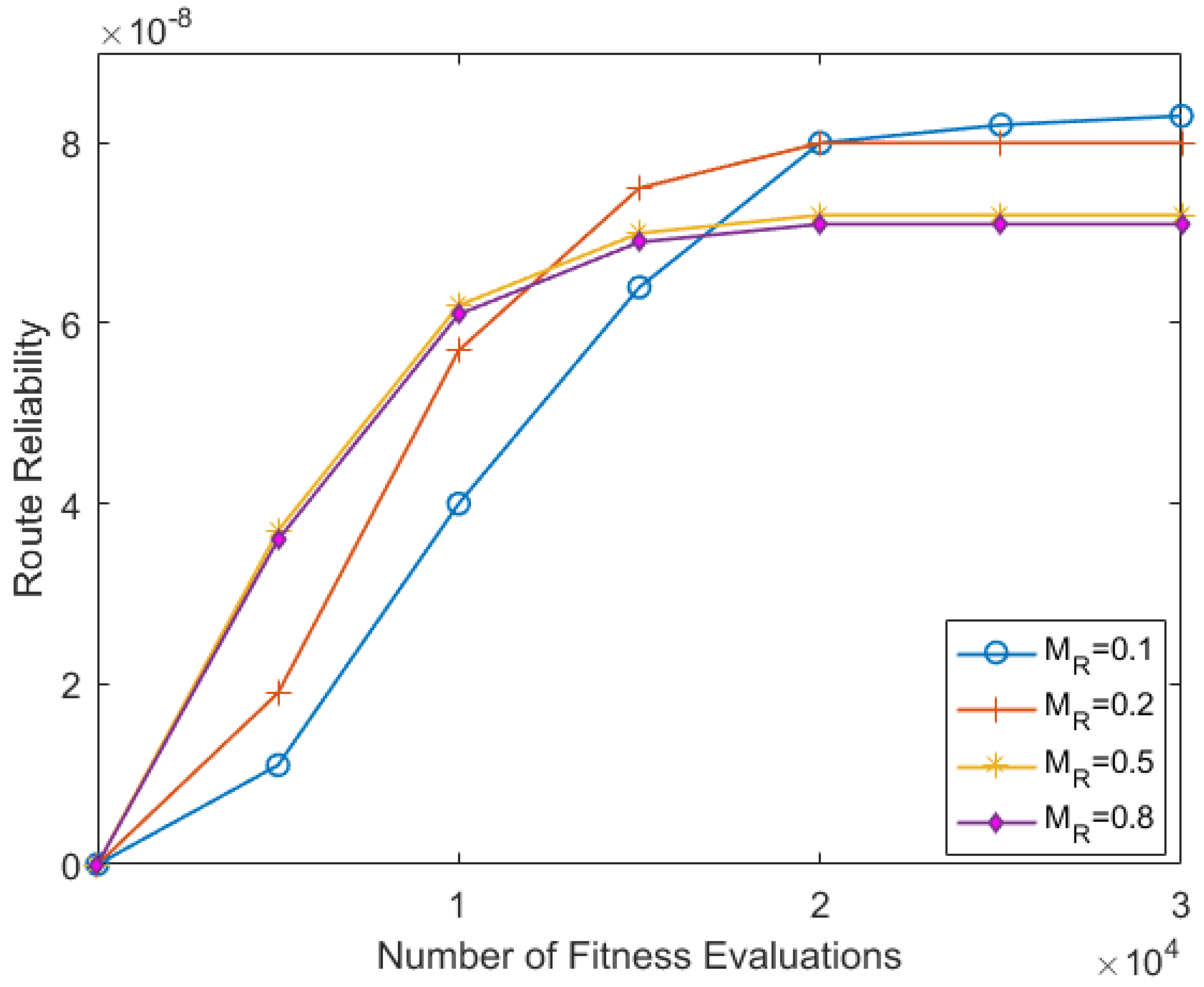
6.2.1. Route Reliability Results Based on the Probability of Mating Rate Parameter
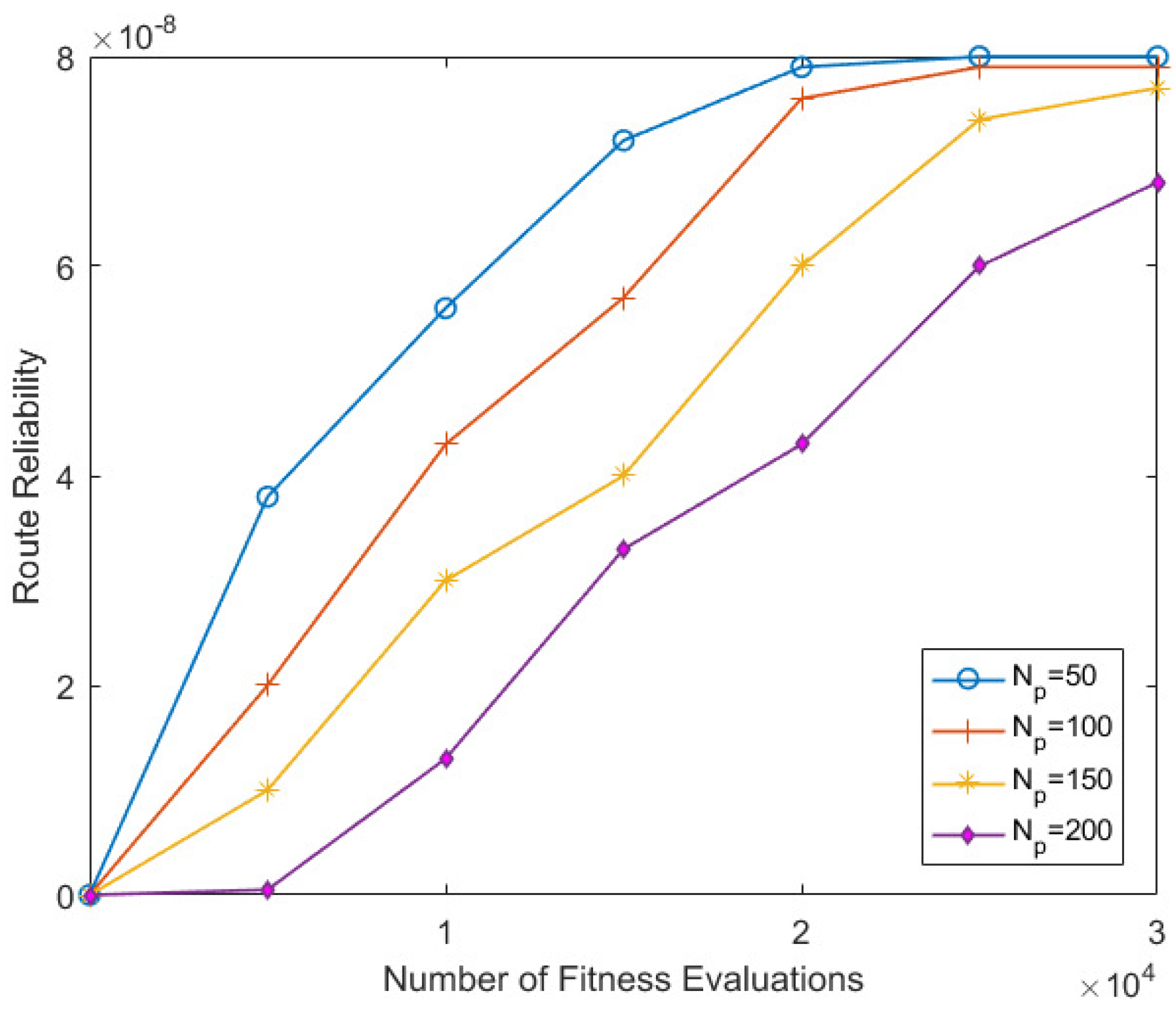
6.2.2. Route Reliability Results Based on Population Size POP Parameter
6.2.3. Mean Route Reliability Results Based on the Different Velocity Values
6.3. Result Analysis under Various Vehicle-Density Ratios
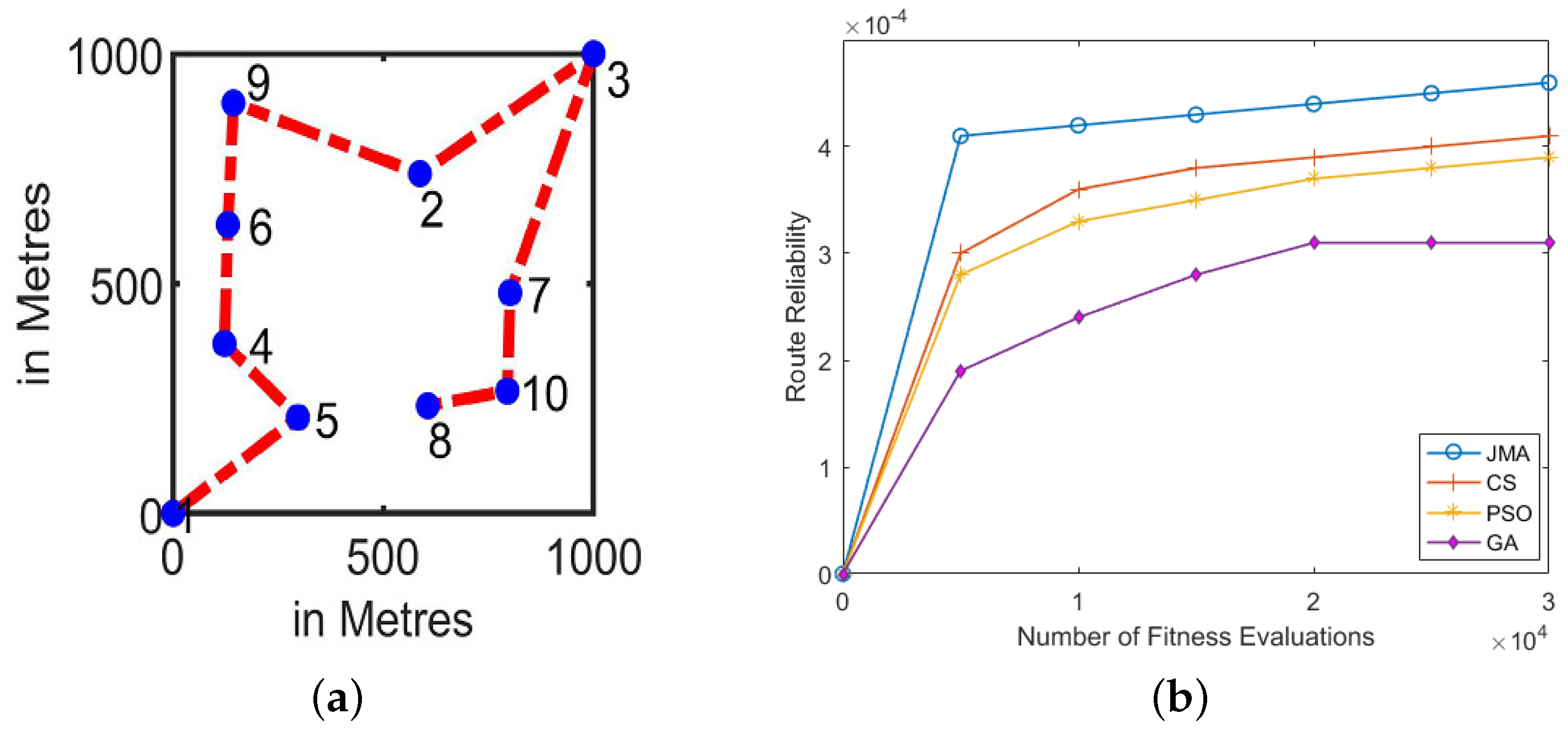
6.3.1. Test Case 1: Low Density (10 Vehicles)
6.3.2. Test Case 2: Medium Density (30 Vehicles)
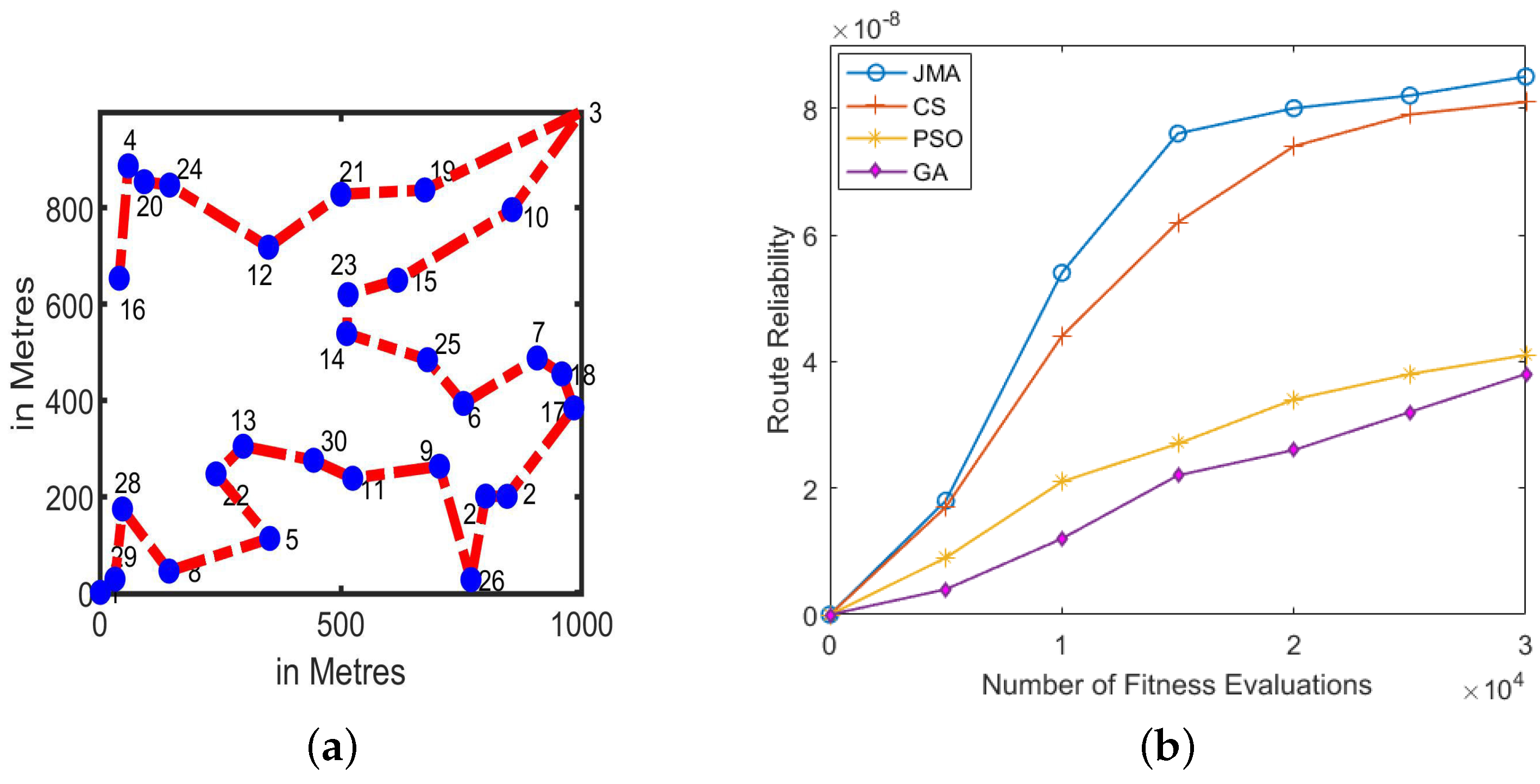
6.3.3. Test Case 3: High Density (50 Vehicles)
6.4. Discussion of Outcomes
- Based on parameter tuning experimentation, we found that the minimized values for the probability of mating rate provides better route discovery. Therefore, we suggest that the use of smaller values enhance the diversification of our proposed JMA and therefore eradicates local optima and premature convergence.
- Based on population size varying experimentation, we suggest that using population size achieves best route discovery reliability. However, maximizing population size will lead to high computation complexity rather than reduced complexity, as well as lower accuracy.
- Based on varying the velocity of vehicles, we suggest that using velocity of 20 km/h and lower will achieve the best reliable route discovery for the efficient transmission of information over the vehicles.
- Finally, JMA achieves the satisfactory performance over the all the different density scenarios. Among these three different scenarios, JMA provides the best results in low- and medium-density test cases, and kept the pace in high-density test cases.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| JMA | Java Macaque Algorithm |
| IoT | Internet of Things |
| VANETs | Vehicular Ad hoc Networks |
| DCSO | Discrete Cuckoo Search |
| GWO | Grey Wolf Optimization |
| PSO | Particle Swarm Optimization |
| GA | Genetic Algorithm |
| NIOA | Nature-Inspired Optimization Algorithm |
| V2V | Vehicle-to-Vehicle |
| V2I | Vehicle-to-Infrastructure |
| ACO | Ant Colony Optimization |
| MLA | Modified Lion Algorithm |
| BA | Bat Algorithm |
| FA | Firefly Algorithm |
| AODV | Ad hoc On-demand Distance Vector |
| RSS | Received Signal Strength |
| Individual | |
| Feasible solution search space | |
| Problem space | |
| Learning rate of individual | |
| Number of population | |
| Male Replacement rate | |
| Different learning rate | |
| Population | |
| Number of Vehicle | |
| Group of Alpha Male | |
| Non-Dominant Set | |
| Dominant Set | |
| Group of Alpha Female | |
| Fitness value of individual | |
| Offspring individual | |
| Stray Male individual | |
| Eliminated Set |
References
- Bello-Salau, H.; Aibinu, A.; Wang, Z.; Onumanyi, A.; Onwuka, E.; Dukiya, J. An optimized routing algorithm for vehicle ad-hoc networks. Eng. Sci. Technol. Int. J. 2019, 22, 754–766. [Google Scholar] [CrossRef]
- Dua, A.; Kumar, N.; Bawa, S. A systematic review on routing protocols for vehicular ad hoc networks. Vehr. Commun. 2014, 1, 33–52. [Google Scholar] [CrossRef]
- Bello-Salau, H.; Aibinu, A.; Onwuka, E.; Dukiya, J.; Bima, M.; Onumanyi, A.; Folorunso, T. A new measure for analysing accelerometer data towards developing efficient road defect profiling systems. J. Sci. Res. Rep. 2015, 7, 108–116. [Google Scholar] [CrossRef]
- Babu, S.; Kumar, P.A.R. DTMR: An Adaptive Distributed Tree-based Multicast Routing Protocol for Vehicular Networks. Comput. Stand. Interfaces 2021, 79, 103551. [Google Scholar] [CrossRef]
- Sravya, A.; Dinesh, K.; Prasad, S. A Density based Deceptive data Detection in VANET. Int. J. Recent Technol. Eng. (IJRTE) 2019, 7, 136–140. [Google Scholar]
- Todosijević, R.; Mjirda, A.; Mladenović, M.; Hanafi, S.; Gendron, B. A general variable neighborhood search variants for the travelling salesman problem with draft limits. Optim. Lett. 2017, 11, 1047–1056. [Google Scholar] [CrossRef]
- Kyritsis, M.; Blathras, G.; Gulliver, S.; Varela, V.A. Sense of direction and conscientiousness as predictors of performance in the Euclidean travelling salesman problem. Heliyon 2017, 3, e00461. [Google Scholar] [CrossRef]
- Dinesh, K.; Subramanian, R.; Dweib, I.; Nandhini, M.; Mohamed, M.Y.N.; Rajakumar, R. Bi-Directional Self-Organization Technique for Enhancing the Genetic Algorithm. In Proceedings of the 6th International Conference on Information Technology: IoT and Smart City, Hong Kong, China, 29 December 2018–31 December 2019; pp. 251–255. [Google Scholar]
- Manicassamy, J.; Karunanidhi, D.; Pothula, S.; Thirumal, V.; Ponnurangam, D.; Ramalingam, S. GPS: A constraint-based gene position procurement in chromosome for solving large-scale multiobjective multiple knapsack problems. Front. Comput. Sci. 2018, 12, 101–121. [Google Scholar] [CrossRef]
- Hernández-Pérez, H.; Salazar-González, J.J.; Santos-Hernández, B. Heuristic algorithm for the split-demand one-commodity pickup-and-delivery travelling salesman problem. Comput. Operat. Res. 2018, 97, 1–17. [Google Scholar] [CrossRef]
- Kandali, K.; Bennis, L.; Bennis, H. A New Hybrid Routing Protocol Using a Modified K-Means Clustering Algorithm and Continuous Hopfield Network for VANET. IEEE Access 2021, 9, 47169–47183. [Google Scholar] [CrossRef]
- Apinantanakon, W.; Sunat, K.; Chiewchanwattana, S. A Cooperation of Multileader Fruit Fly and the Probabilistic Random Walk with Adaptive Normalization for Solving Solution of the Unconstrained Optimization Problems. Preprints 2018, 2018090495. [Google Scholar] [CrossRef]
- El Ouahmani, T.; Chehri, A.; Hakem, N. Bio-inspired routing protocol in VANET networks-a case study. Procedia Comput. Sci. 2019, 159, 2384–2393. [Google Scholar] [CrossRef]
- Oh, B.; Na, Y.; Yang, J.; Park, S.; Nang, J.; Kim, J. Genetic algorithm-based dynamic vehicle route search using car-to-car communication. Adv. Electr. Comput. Eng. 2010, 10, 81–86. [Google Scholar] [CrossRef]
- Aibinu, A.; Salau, H.B.; Rahman, N.A.; Nwohu, M.; Akachukwu, C. A novel clustering based genetic algorithm for route optimization. Eng. Sci. Technol. Int. J. 2016, 19, 2022–2034. [Google Scholar] [CrossRef]
- Oranj, A.; Alguliev, R.; Yusifov, F.; Jamali, S. Routing algorithm for vehicular ad hoc network based on dynamic ant colony optimization. Int. J. Electron. Elect. Eng. 2016, 4, 79–83. [Google Scholar] [CrossRef][Green Version]
- Jindal, V.; Bedi, P. An improved hybrid ant particle optimization (IHAPO) algorithm for reducing travel time in VANETs. Appl. Soft Comput. 2018, 64, 526–535. [Google Scholar] [CrossRef]
- Wagh, M.B.; Gomathi, N. Route discovery for vehicular ad hoc networks using modified lion algorithm. Alex. Eng. J. 2018, 57, 3075–3087. [Google Scholar] [CrossRef]
- Fahad, M.; Aadil, F.; Khan, S.; Shah, P.A.; Muhammad, K.; Lloret, J.; Wang, H.; Lee, J.W.; Mehmood, I. Grey wolf optimization based clustering algorithm for vehicular ad-hoc networks. Comput. Electr. Eng. 2018, 70, 853–870. [Google Scholar] [CrossRef]
- Bitam, S.; Mellouk, A. Bee life-based multi constraints multicast routing optimization for vehicular ad hoc networks. J. Netw. Comput. Appl. 2013, 36, 981–991. [Google Scholar] [CrossRef]
- Elhoseny, M. Intelligent firefly-based algorithm with Levy distribution (FF-L) for multicast routing in vehicular communications. Expert Syst. Appl. 2020, 140, 112889. [Google Scholar] [CrossRef]
- Mehta, K.; Bajaj, P.; Malik, L. Fuzzy bacterial foraging optimization zone based routing (FBFOZBR) protocol for VANET. In Proceedings of the 2016 International Conference on ICT in Business Industry & Government (ICTBIG), Indore, India, 18–19 November 2016; pp. 1–10. [Google Scholar]
- Masegosa, A.D.; Osaba, E.; Angarita-Zapata, J.S.; Laña, I.; Ser, J.D. Nature-inspired metaheuristics for optimizing information dissemination in vehicular networks. In Proceedings of the Genetic and Evolutionary Computation Conference Companion, Prague, Czech Republic, 13–17 July 2019; pp. 1312–1320. [Google Scholar]
- Bello-Salau, H.; Onumanyi, A.J.; Abu-Mahfouz, A.M.; Adejo, A.O.; Mu’Azu, M.B. New discrete cuckoo search optimization algorithms for effective route discovery in IoT-based vehicular ad-hoc networks. IEEE Access 2020, 8, 145469–145488. [Google Scholar] [CrossRef]
- Chandren Muniyandi, R.; Hasan, M.K.; Hammoodi, M.R.; Maroosi, A. An improved harmony search algorithm for proactive routing protocol in VANET. J. Adv. Transp. 2021, 2021, 6641857. [Google Scholar] [CrossRef]
- Ramamoorthy, R.; Thangavelu, M. An enhanced hybrid ant colony optimization routing protocol for vehicular ad-hoc networks. J. Ambient Intell. Hum. Comput. 2021, 1–32. [Google Scholar] [CrossRef]
- Afzal, K.; Tariq, R.; Aadil, F.; Iqbal, Z.; Ali, N.; Sajid, M. An Optimized and Efficient Routing Protocol Application for IoV. Math. Probl. Eng. 2021, 2021, 9977252. [Google Scholar] [CrossRef]
- Kudva, S.; Badsha, S.; Sengupta, S.; La, H.; Khalil, I.; Atiquzzaman, M. A scalable blockchain based trust management in VANET routing protocol. J. Parallel Distrib. Comput. 2021, 152, 144–156. [Google Scholar] [CrossRef]
- Karunanidy, D.; Amudhavel, J.; Datchinamurthy, T.S.; Ramalingam, S. A novel java macaque algorihtm for travelling salesman prolem. IIOAB J. 2017, 8, 252–261. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values |
|---|---|
| 0 dBW | |
| 5.925 GHz | |
| A | 1 km × 1 km |
| Algorithms | Parameter Values |
|---|---|
| 2]*GA variants | Crossover rate = 0.8 |
| Mutation rate = 0.2 | |
| Selection rate = 0.8 | |
| Roulette wheel selection operator | |
| Elitism rate = 0.5 | |
| Cuckoo Search | Probability of abandoning eggs = 0.2 |
| 2]*PSO Variants | Cognitive parameter C1 = 0.5 |
| Social Parameter C2 = 0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karunanidy, D.; Ramalingam, R.; Dumka, A.; Singh, R.; Alsukayti, I.; Anand, D.; Hamam, H.; Ibrahim, M. An Intelligent Optimized Route-Discovery Model for IoT-Based VANETs. Processes 2021, 9, 2171. https://doi.org/10.3390/pr9122171
Karunanidy D, Ramalingam R, Dumka A, Singh R, Alsukayti I, Anand D, Hamam H, Ibrahim M. An Intelligent Optimized Route-Discovery Model for IoT-Based VANETs. Processes. 2021; 9(12):2171. https://doi.org/10.3390/pr9122171
Chicago/Turabian StyleKarunanidy, Dinesh, Rajakumar Ramalingam, Ankur Dumka, Rajesh Singh, Ibrahim Alsukayti, Divya Anand, Habib Hamam, and Muhammad Ibrahim. 2021. "An Intelligent Optimized Route-Discovery Model for IoT-Based VANETs" Processes 9, no. 12: 2171. https://doi.org/10.3390/pr9122171
APA StyleKarunanidy, D., Ramalingam, R., Dumka, A., Singh, R., Alsukayti, I., Anand, D., Hamam, H., & Ibrahim, M. (2021). An Intelligent Optimized Route-Discovery Model for IoT-Based VANETs. Processes, 9(12), 2171. https://doi.org/10.3390/pr9122171