
Research on Variable-Universe Fuzzy Control Technology of an Electro-Hydraulic Hitch System

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
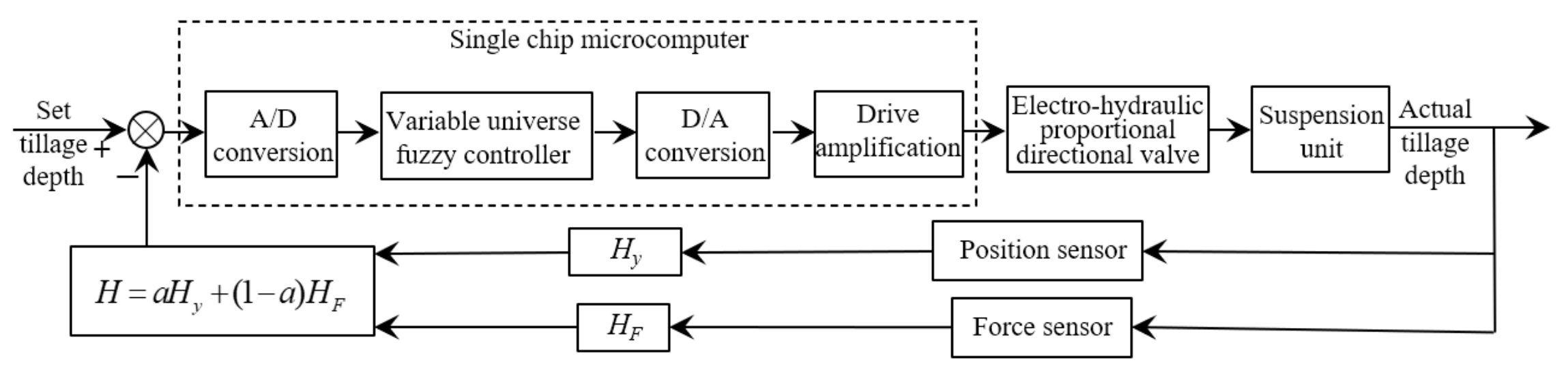
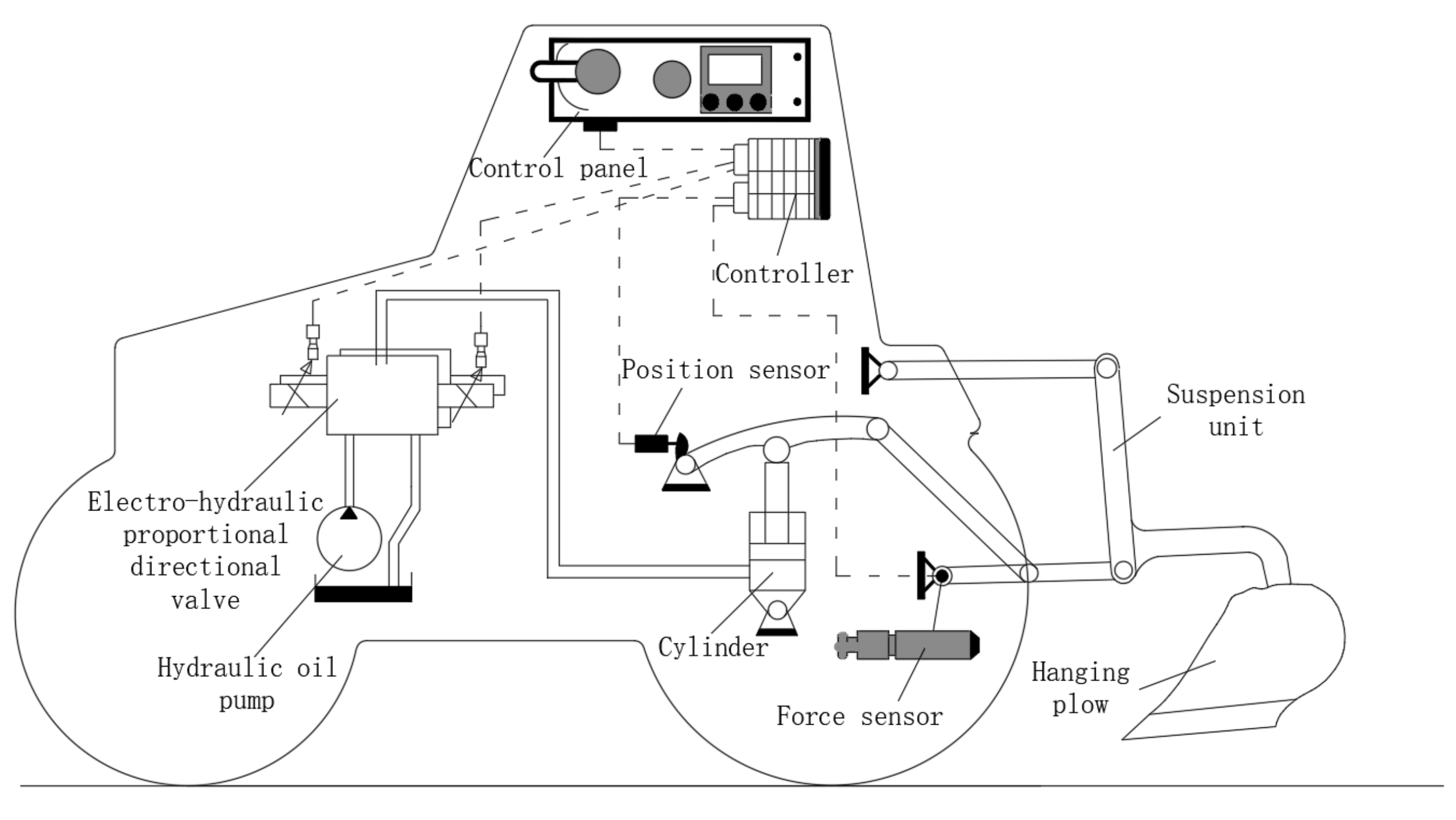
2.1. Electronically Controlled Hydraulic Suspension Operating System
2.1.1. Operating System Structure
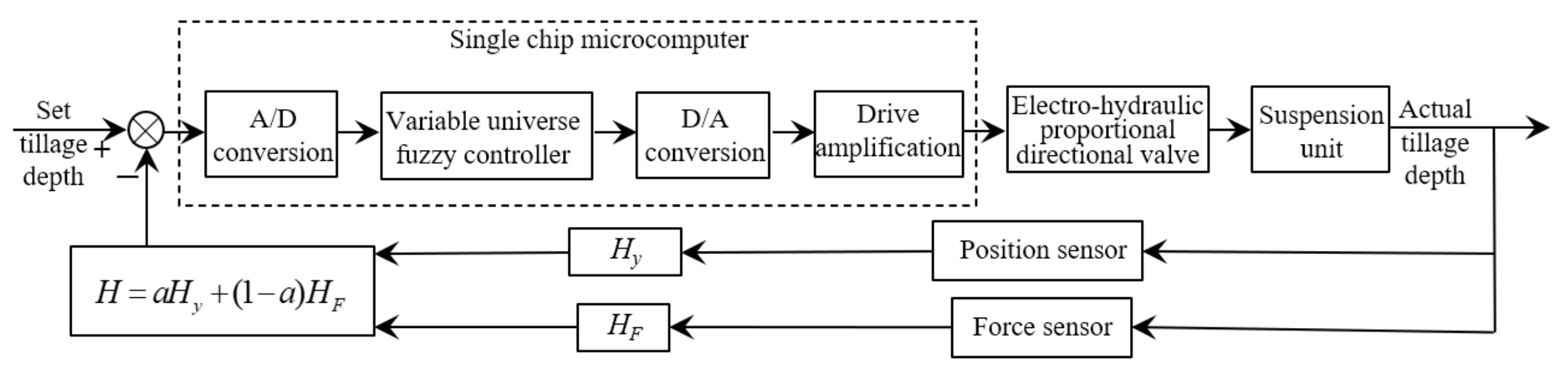
2.1.2. Operating System Regulation Mechanism
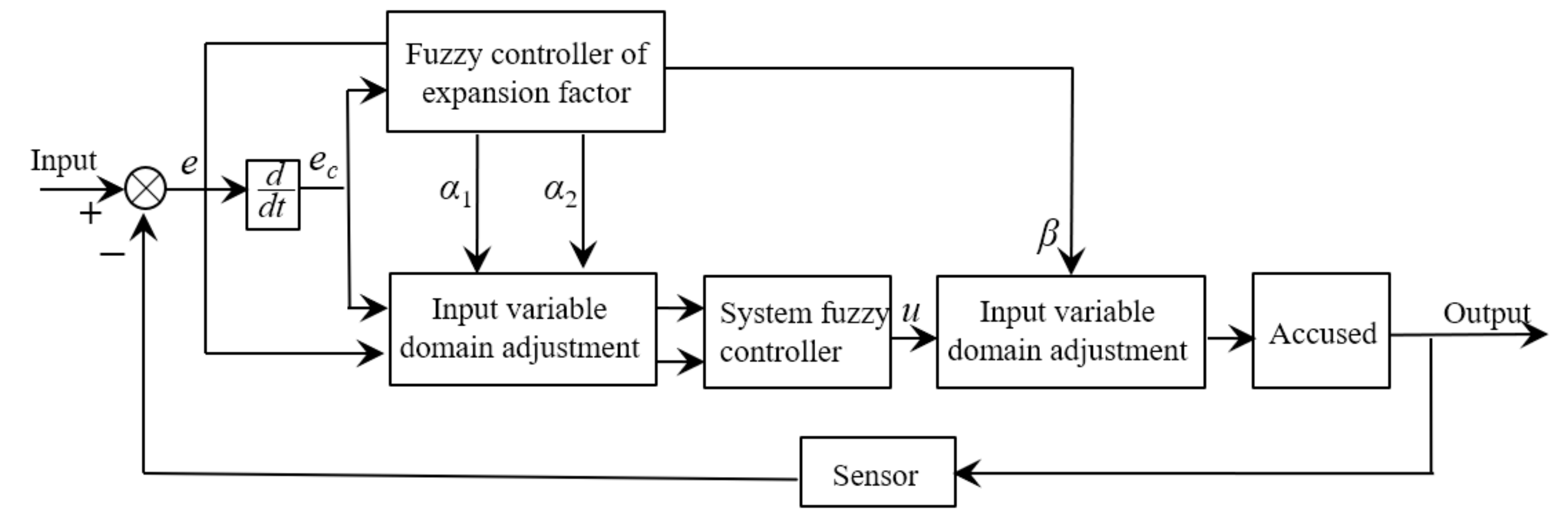
2.2. Design of the Fuzzy Controller with a Variable Universe
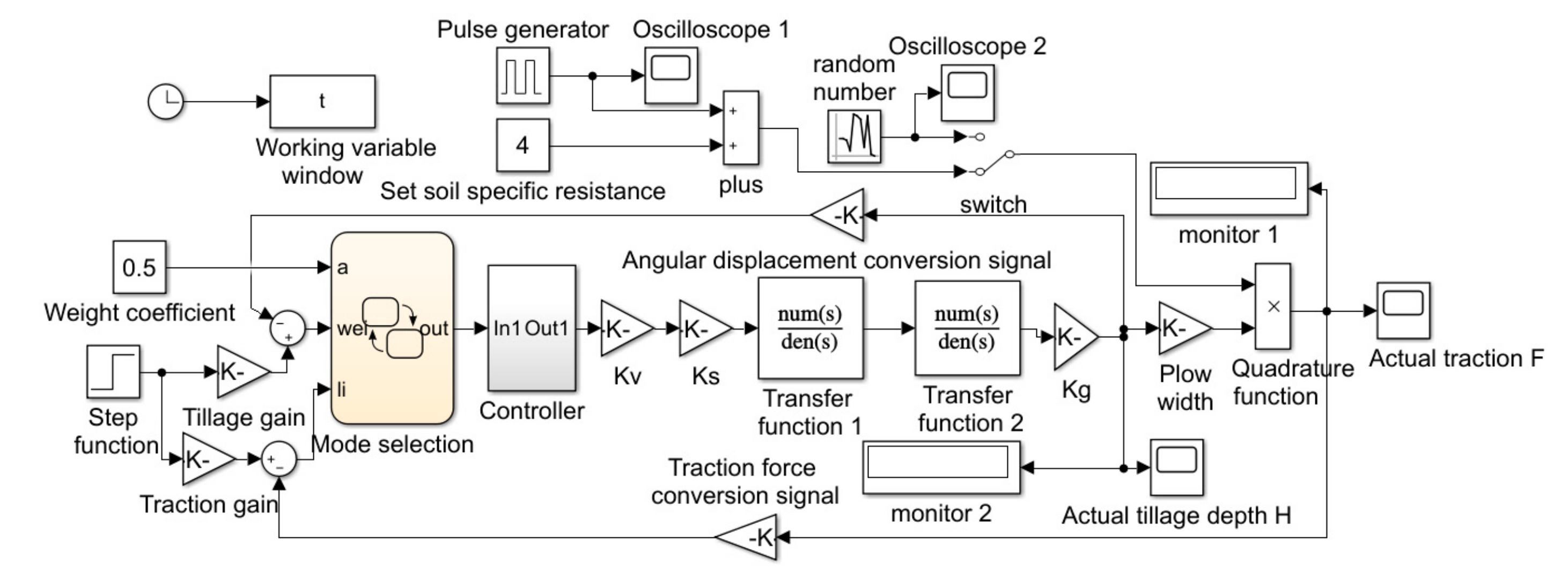
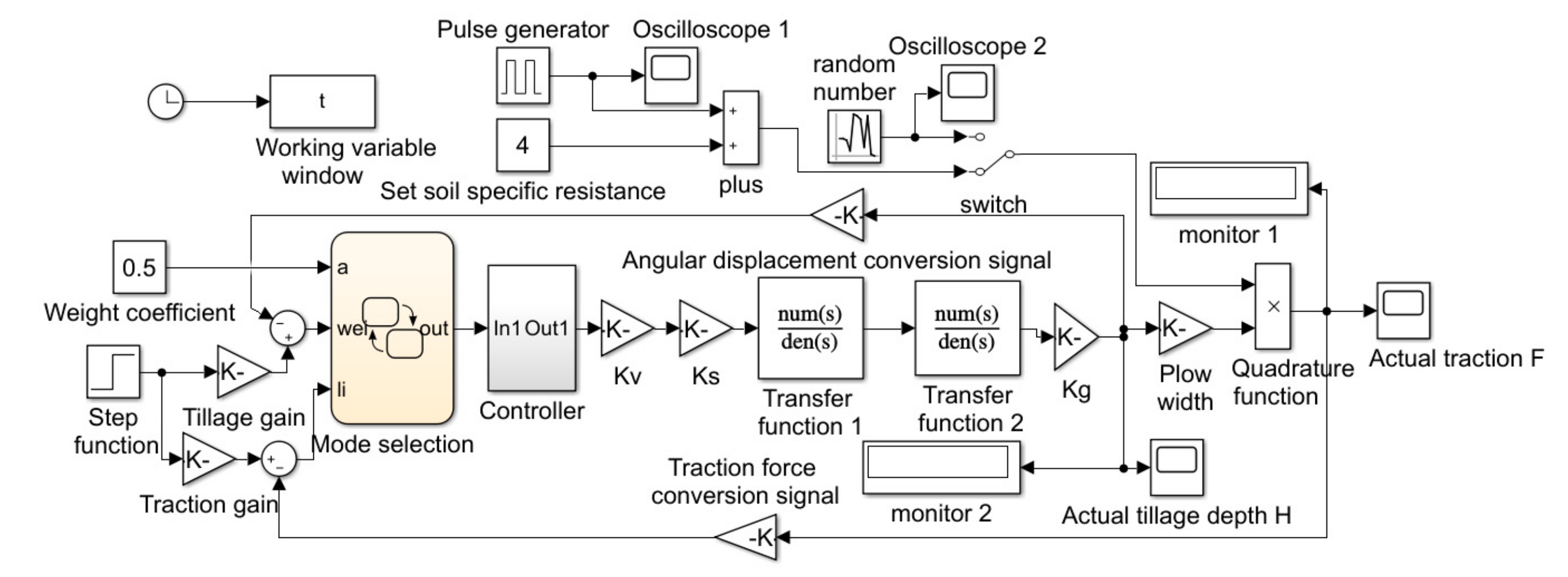
2.2.1. Control Algorithm and Structure
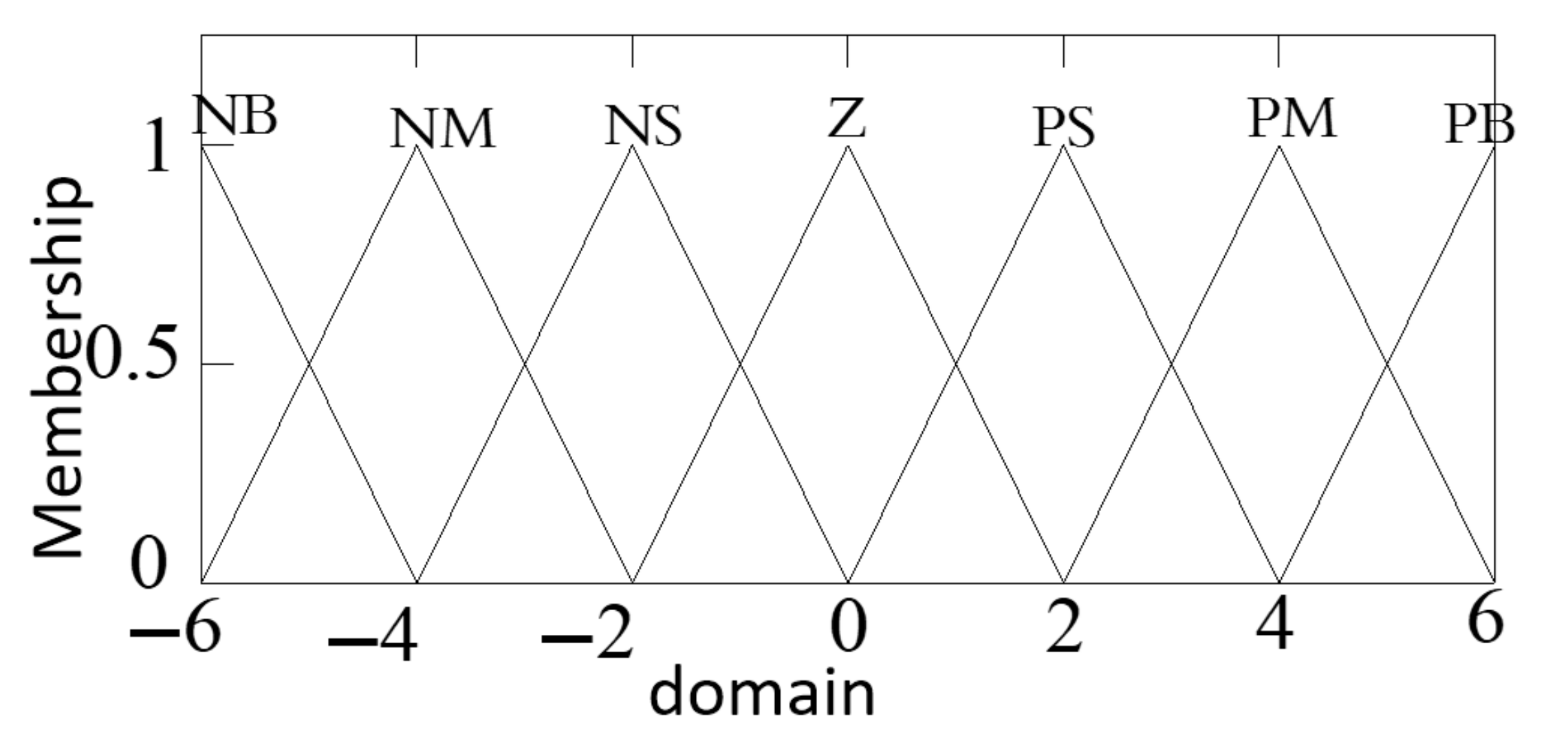
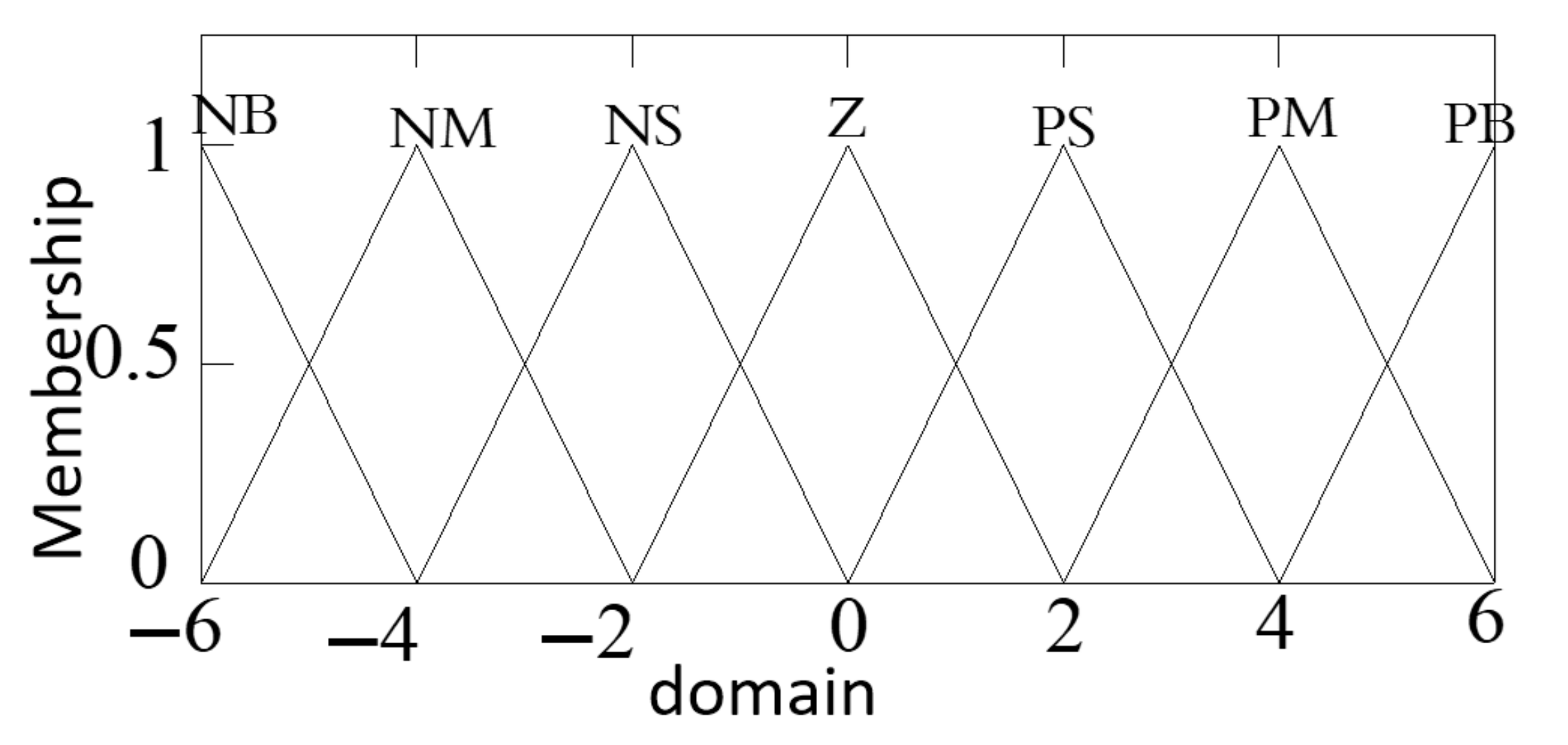
2.2.2. Design of the Fuzzy Controller System
- (1)
- When the tillage depth error is positive or negative, a reverse tillage depth adjustment amount should be applied to speed up the system response speed and ensure the accuracy of the tillage depth.
- (2)
- When the tillage depth is positive or negative and is negative or positive, the tillage depth adjustment amount should not be applied to ensure the stability of the system.
- (3)
- When the tillage depth is positive or negative, as changes from negative to positive, an adjustment amount of tillage depth opposite to should be applied to offset the change in tillage depth caused by changes in .
- (4)
- When the tillage depth is positive or negative, or basically remains unchanged, as changes from negative to positive, a tillage depth adjustment amount opposite to and a smaller value should be applied to ensure that the tillage depth will not change to the opposite direction.
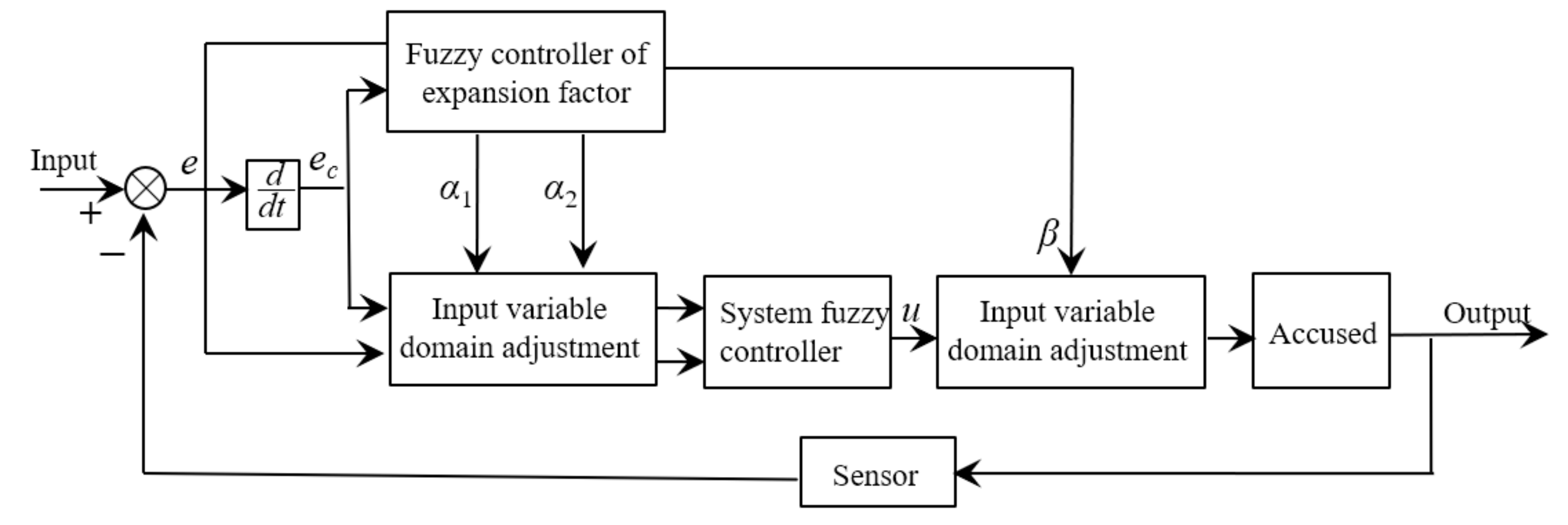
2.2.3. Design of the Fuzzy Controller with an Expansion Factor
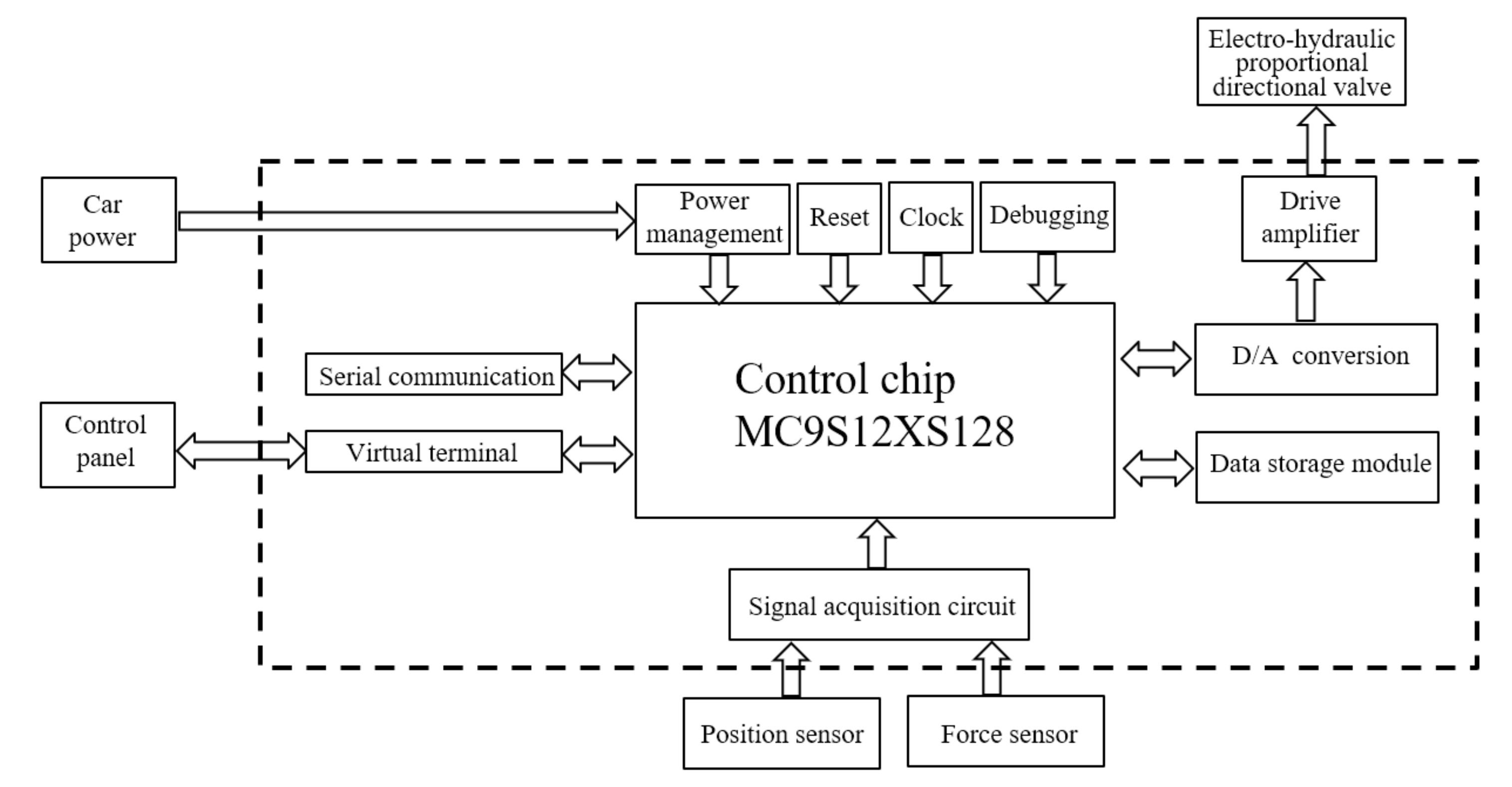
2.3. Software and Hardware Design of the Control Module
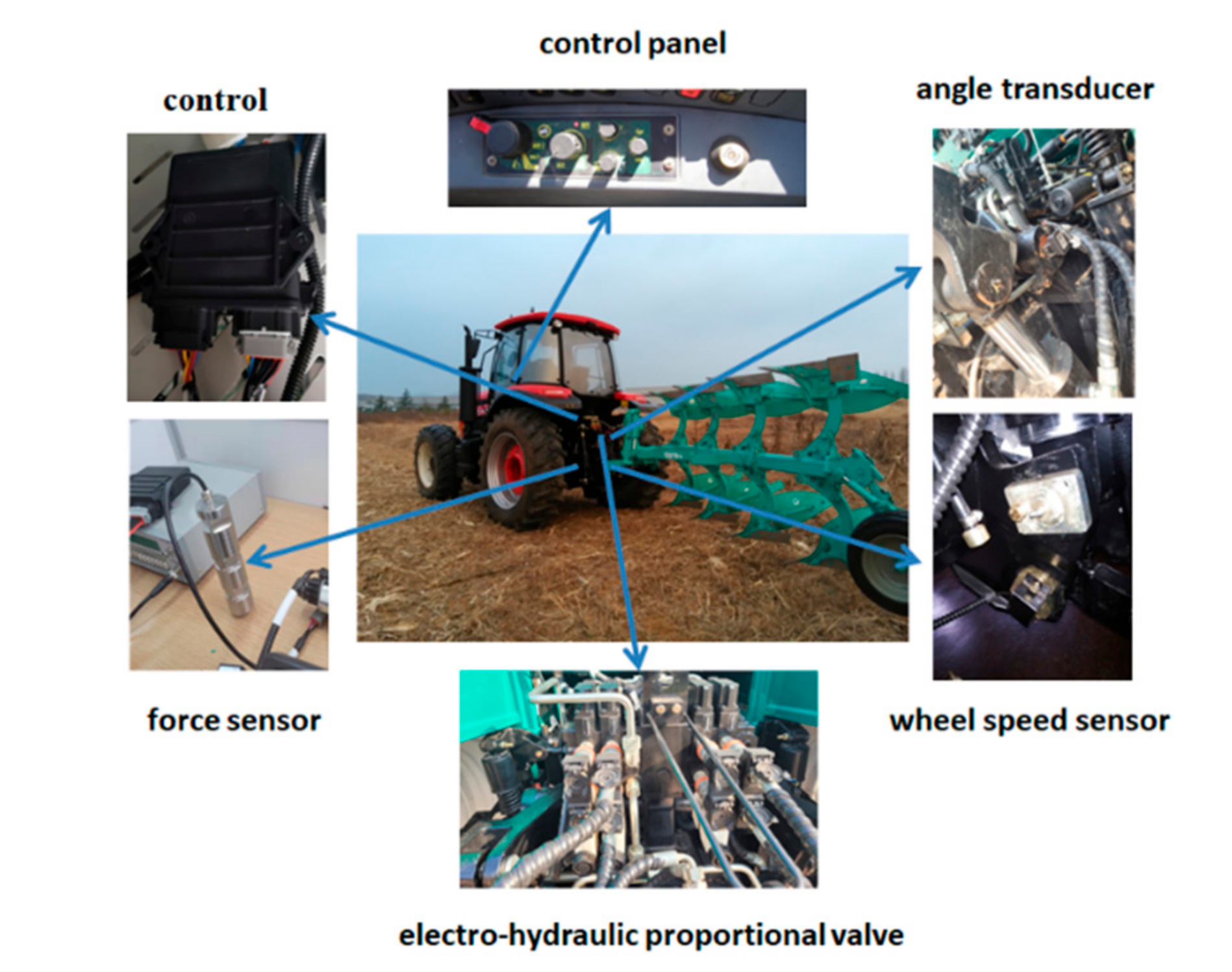
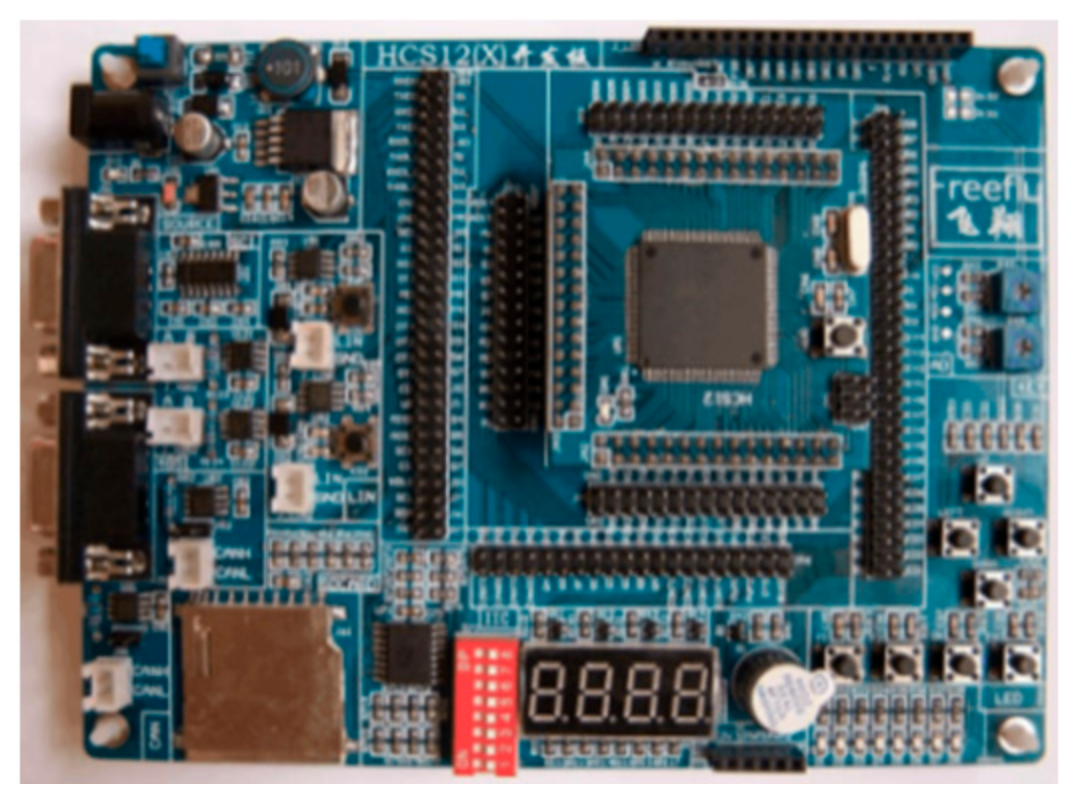
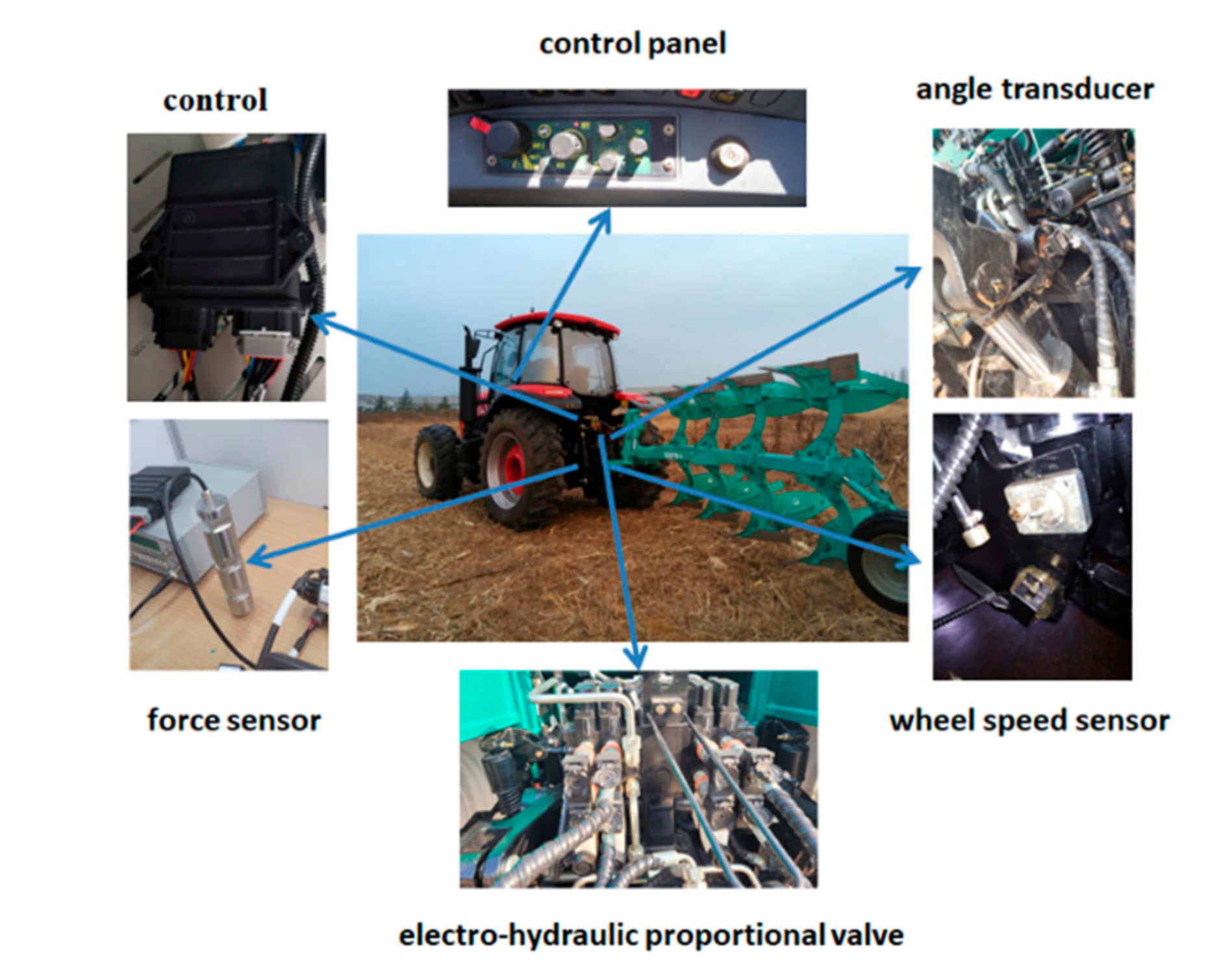
2.3.1. Hardware Design of the Control Module
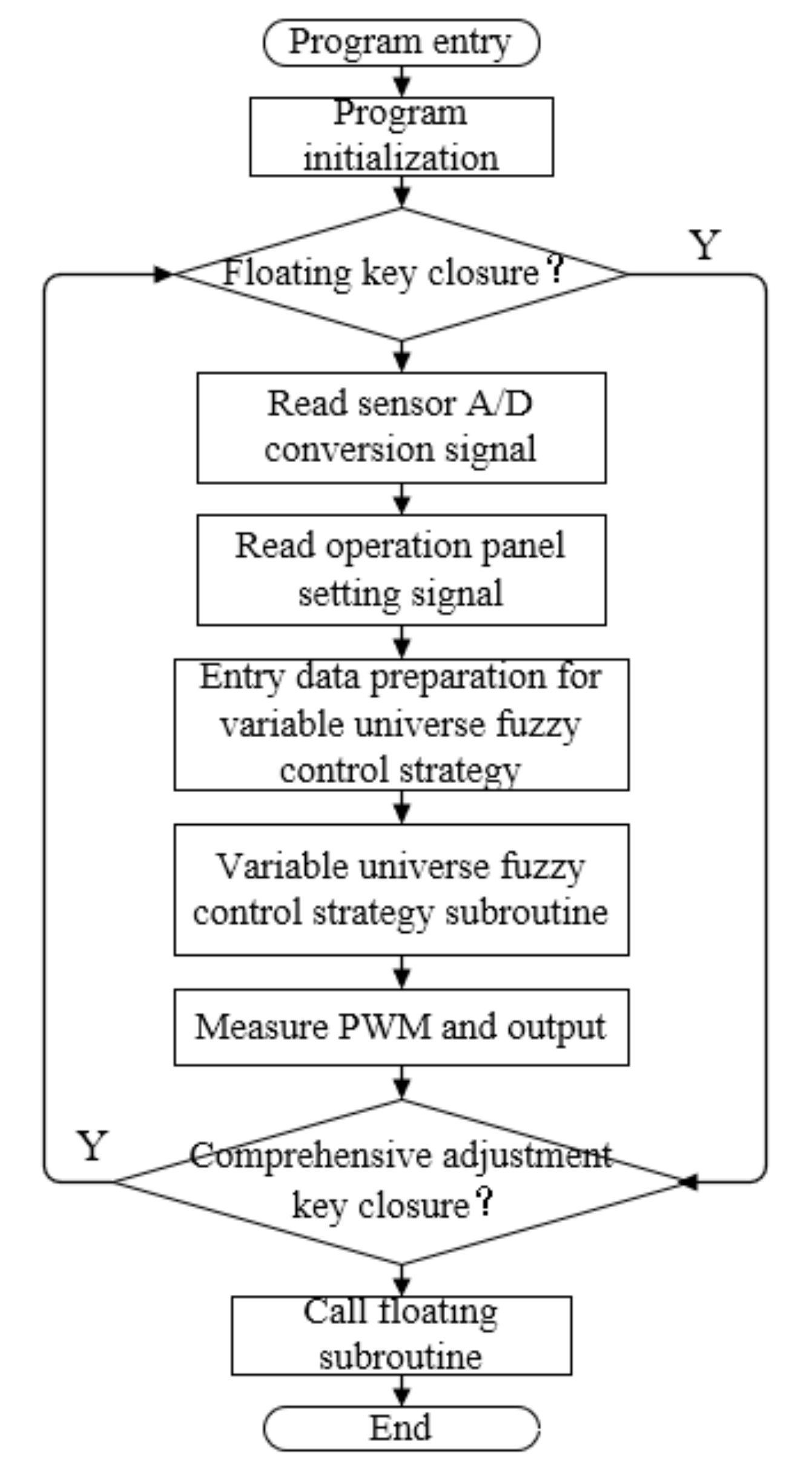
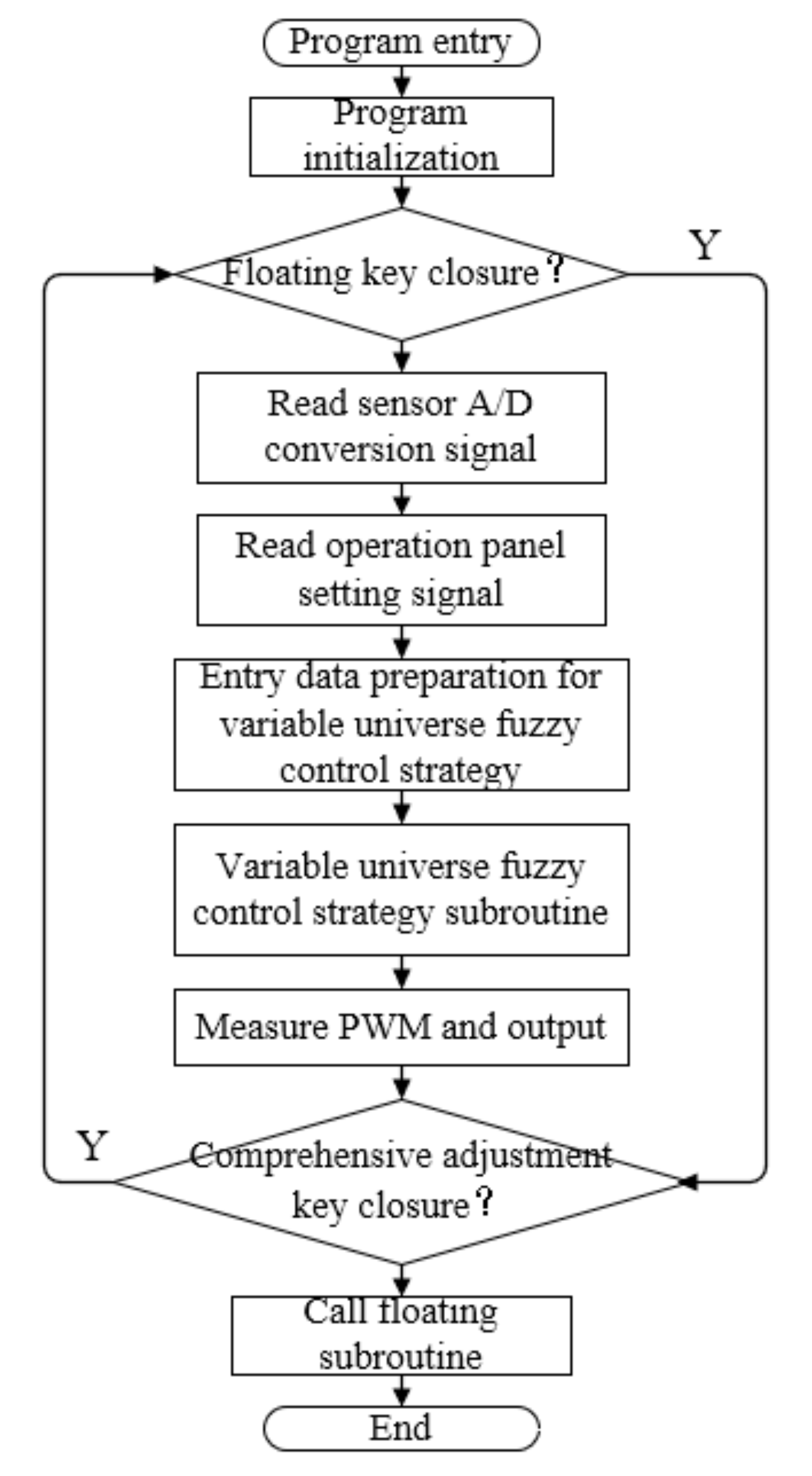
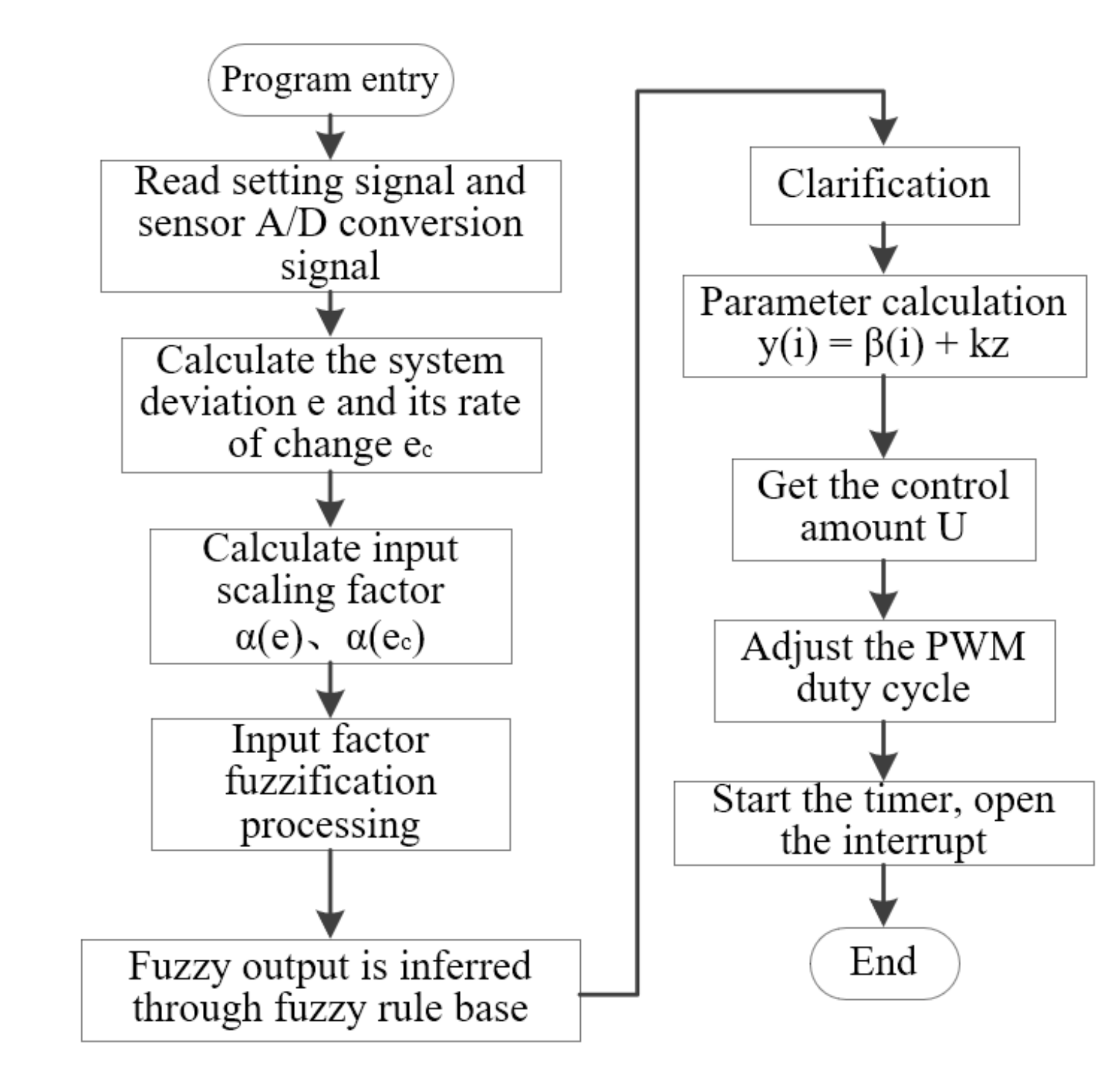
2.3.2. Software Design of the Control Module
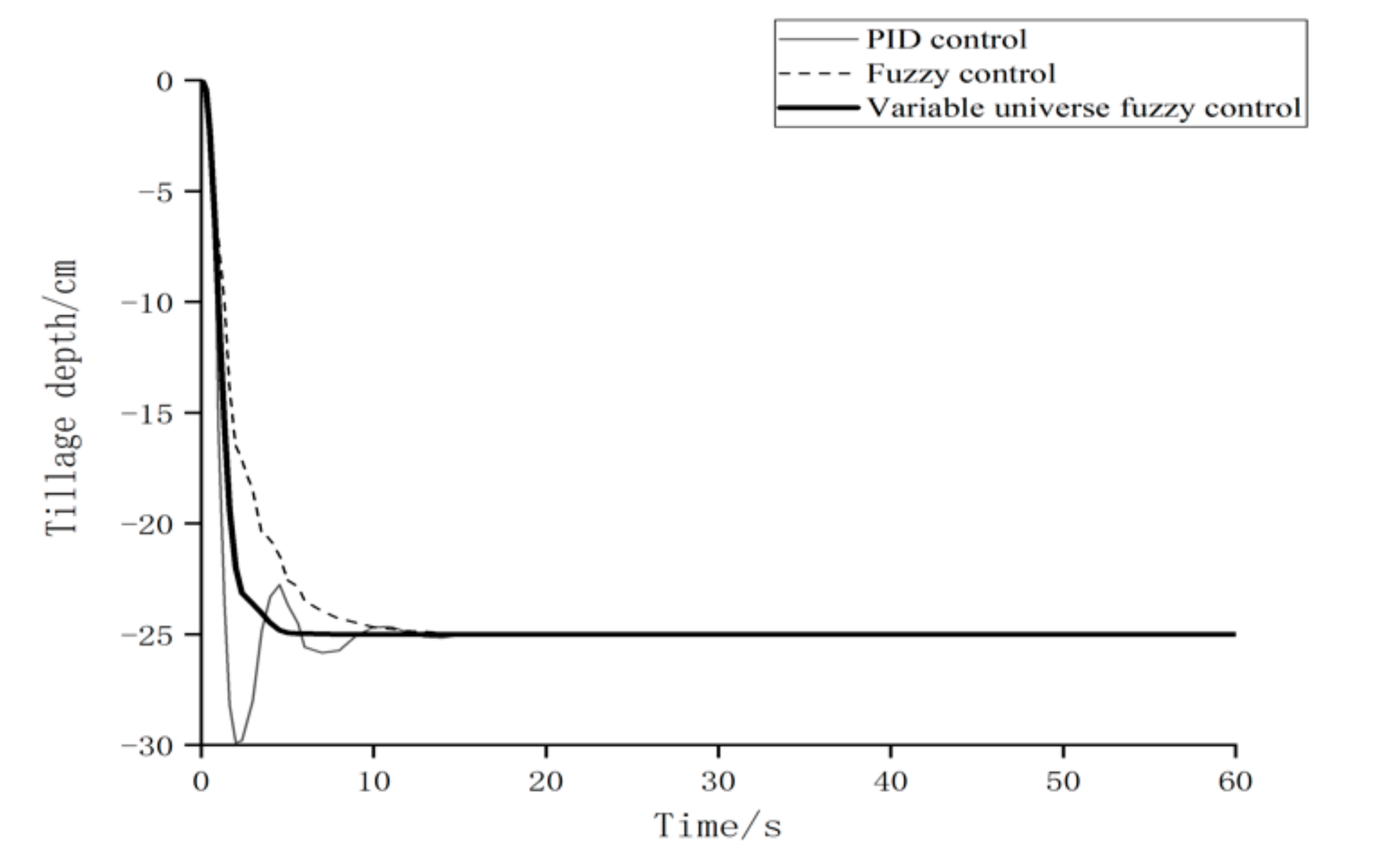
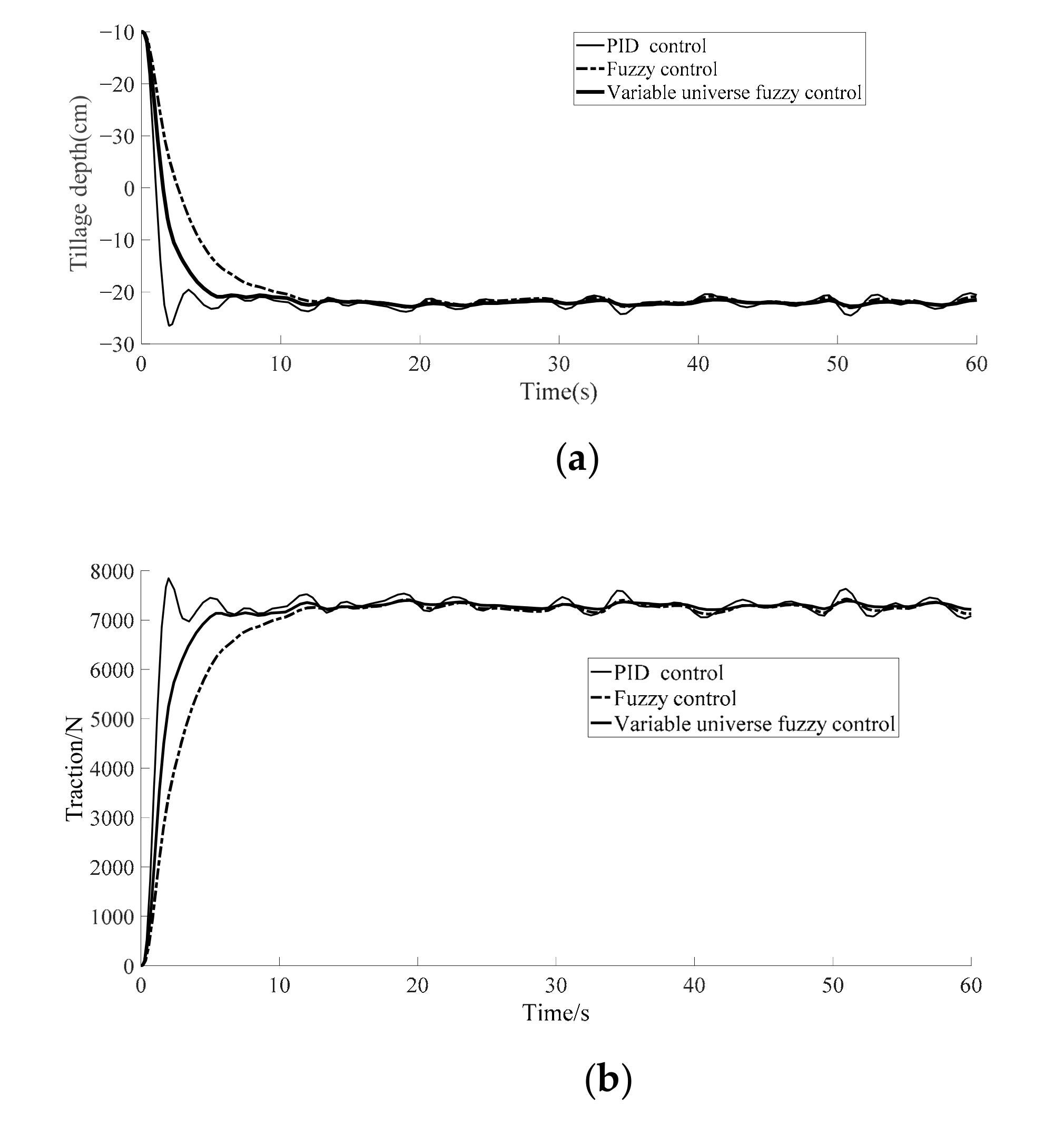
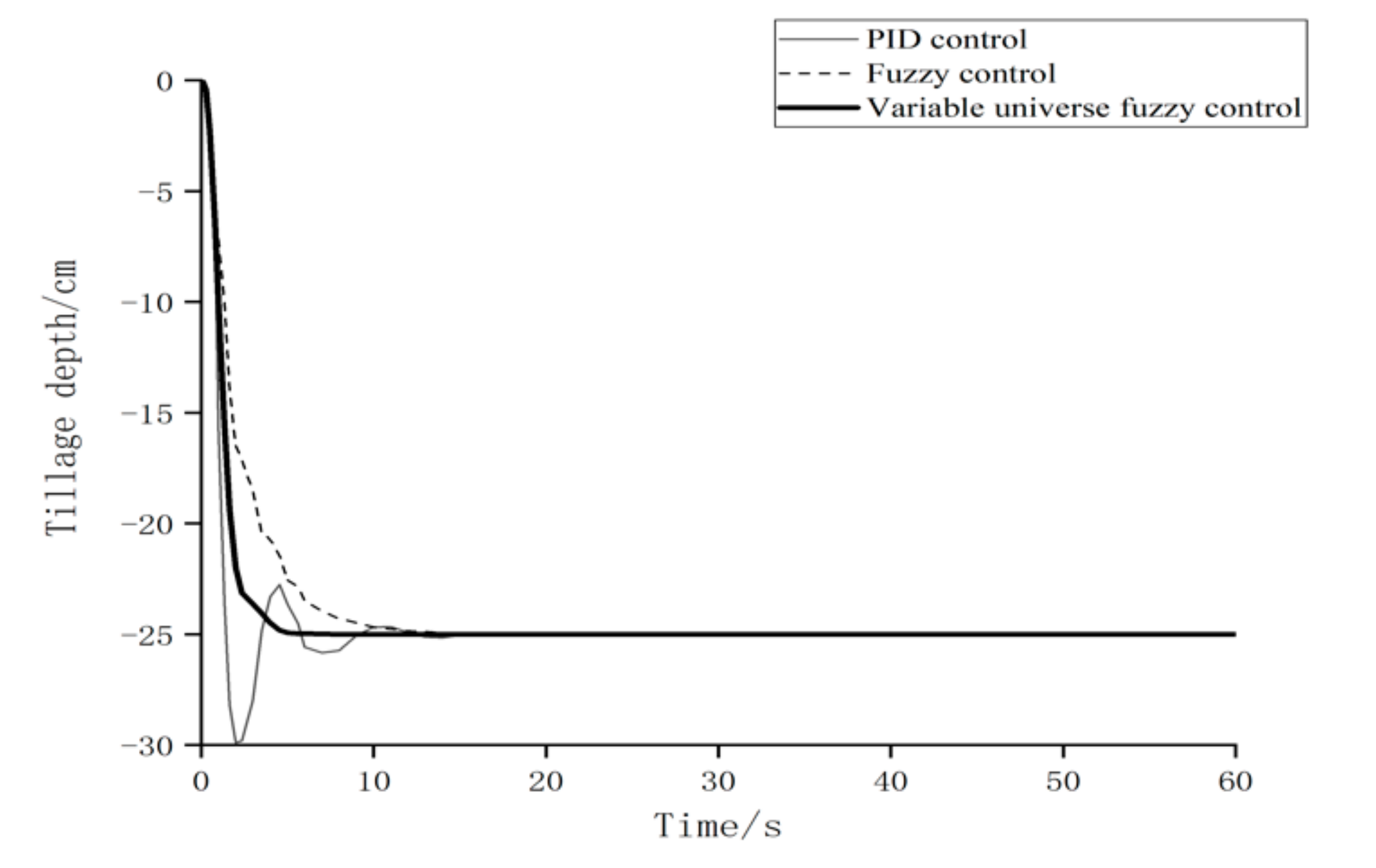
3. Results
4. Discussion
4.1. Test Conditions and Scheme
4.2. Test Data Collection and Result Analysis
5. Conclusions
6. Patents
- Ruichuan Li, Jikang Xu, Chengliang Liu et al. AMT hydraulic shift executive system with pressure limiting and positioning function: China, CN201710045884.6. 28 August 2018.
- Ruichuan Li, Jikang Xu, Chengliang Liu et al. An AMT gear selection and shifting hydraulic executive system with pressure limiting and positioning function: China, CN201710045916.2. 21 August 2018.
- Chengliang Liu, Ruichuan Li, Jikang Xu et al. Silicon steel sheet superimposed force sensor: China, CN201811417081.X. 25 January 2019.
- Ruichuan Li, Chengliang Liu, Jikang Xu et al. Dual accumulator braking energy recovery system based on hydro mechanical continuously variable transmission: China, CN201811359976.2. 29 January 2019.
- Chengliang Liu, Ruichuan Li, Jikang Xu et al. Double planet five section hydro mechanical continuously variable transmission: China, CN201811359946.1. 1 February 2019.
- Chengliang Liu, Ruichuan Li, Jikang Xu et al. New traction sensor: China, CN201811417105.1. 25 February 2019.
- Ruichuan Li, Hongmei Han, Jikang Xu et al. A multi parameter United automatic regulation system for tractor plowing depth: China, CN202020106874.6. 10 November 2020.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, M.S.; Zhao, J.J.; Zhu, Z.X.; Xie, B.; Chi, R.; Mao, E.R. Fuzzy-PID Self-adaptive control method in electro-hydraulic hitch system. J. Agric. Mach. 2013, 44, 295–300. [Google Scholar]
- Yang, J.R.; Mu, C.P.; Li, R.C.; Ma, R.; Gao, Y.; Liu, C.Y. Analysis and experimental research on the control method of tractor tillage depth. Agric. Mech. Res. 2020, 42, 235–239. [Google Scholar]
- Ma, Y.; Li, R.C.; Xu, J.K.; Liu, Z.; Zhao, P.; Liu, Y.J. Study on the Fuzzy PID auto-control strategy for tractor tillage depth. Agric. Mech. Res. 2019, 41, 241–247. [Google Scholar]
- Wang, S.Y.; Liu, Z.; Li, R.C.; Xu, J.K.; Liu, Y.J. Variable weight force-position mixed control of high-power tractor based on soil specific resistance. J. Agric. Mach. 2018, 49, 351–357. [Google Scholar]
- Shen, Z.F. Modeling and Simulation Analysis of Tractor Electric Control Hydraulic Suspension System; Jiangsu University: Zhenjiang, China, 2010. [Google Scholar]
- Hong, W.; Ming, Y.; Yu-xian, Z.; Qing-xia, L.; Miao, L.; Bong-bing, Y.; Li-fu, W.; Fang, Y. Design on dynamic measuring and controlling system of driver. In Proceedings of the 2010 International Conference on Computer Mechatronics, Control and Electronic Engineering, Changchun, China, 24–26 August 2010; IEEE: Guilin, China, 2010; pp. 442–444. [Google Scholar]
- Imran, S.M.; Raheman, H.; Rajeev, S.; Abhisek, K. An electromechanical implement lift system with position control for low horse power tractor. Agric. Eng. Int. CIGR J. 2014, 16, 112–121. [Google Scholar]
- Zhang, S.; Du, Y.; Zhu, Z.; Mao, E.; Liu, J.; Shi, J. Integrated control method of traction & slip ratio for rear-driving high-power tractors. Trans. Chin. Soc. Agric. Eng. 2016, 32, 47–53. [Google Scholar]
- Ma, Y.; Li, R.C.; Li, Y.S.; Xu, J.K.; Zhao, P.; Liu, Y.J. Study on uniformity of tractor tillage depth in different soil specific resistance. Agric. Mech. Res. 2019, 41, 156–160. [Google Scholar]
- Liu, Z. Design and Analysis of a High-Power Tractor Electro-Hydraulic Suspension Control System based on Soil Specific Resistance; Shandong University of Science and Technology: Qingdao, China, 2018. [Google Scholar]
- Ma, Y.; Li, R.C.; Liu, Y.J. Study on control method of agricultural tractor plowing based on slip rate. Agric. Mech. Res. 2020, 42, 259–263. [Google Scholar]
- Opdenbosch, P.; Sadegh, N.; Book, W. Intelligent controls for electro-hydraulic poppet valves. Control Eng. Pract. 2013, 21, 789–796. [Google Scholar] [CrossRef]
- Mohammadikia, R.; Aliasghary, M. Design of an interval type-2 fractional order fuzzy controller for a tractor active suspension system. Comput. Electron. Agric. 2019, 167, 105049. [Google Scholar] [CrossRef]
- Wang, S.; Liu, Y.; Wang, Z.; Dong, P.; Cheng, Y.; Xu, X.; Tenberge, P. Adaptive fuzzy iterative control strategy for the wet-clutch filling of automatic transmission. Mech. Syst. Signal Process. 2019, 130, 164–182. [Google Scholar] [CrossRef]
- Sabouri, Y.; Abbaspour-Gilandeh, Y.; Solhjou, A.; Shaker, M.; Szymanek, M.; Sprawka, M. Development and laboratory evaluation of an online controlling algorithm for precision tillage. Sensors 2021, 21, 5603. [Google Scholar] [CrossRef] [PubMed]
- Ding, R.; Cheng, M.; Jiang, L.; Hu, G. Active fault-tolerant control for electro-hydraulic systems with an independent metering valve against valve faults. IEEE Trans. Ind. Electron. 2020, 68, 7221–7232. [Google Scholar] [CrossRef]
- Zhao, J.; Lu, Y.; Guo, M.; Fu, J.; Wang, Y. Design and experiment of bionic stubble breaking-deep loosening combined tillage machine. Int. J. Agric. Biol. Eng. 2021, 14, 123–134. [Google Scholar]
- Soylu, S.; Carman, K. Fuzzy logic based automatic slip control system for agricultural tractors. J. Terramechanics 2021, 95, 25–32. [Google Scholar] [CrossRef]
- Li, H.; Li, S.; Sun, W.; Wang, L.; Lv, D. The optimum matching control and dynamic analysis for air suspension of multi-axle vehicles with anti-roll hydraulically interconnected system. Mech. Syst. Signal Process. 2020, 139, 106605. [Google Scholar] [CrossRef]
- LI, L.F. Research on Variable Universe Fuzzy Control Algorithm; University of Electronic Science and Technology of China: Chengdu, China, 2008. [Google Scholar]
- Zhang, X. Research on Three-Stage Inverted Pendulum Controller Based on Variable Universe Adaptive Fuzzy Control Theory; Dalian University of Technology: Dalian, China, 2010. [Google Scholar]
- Yuan, X.; Chen, Z.; Yuan, Y.; Huang, Y. Design of fuzzy sliding mode controller for hydraulic turbine regulating system via input state feedback linearization method. Energy 2015, 93, 173–187. [Google Scholar] [CrossRef]
- Zhao, J.; Zhu, Z.; Song, Z.; Zhou, R.; Wang, R.; Mao, E. Proportional controller for electro-hydraulic hitch system in heavy tractor. J. Agric. Mach. 2014, 45, 10–16. [Google Scholar]
- Yin, Y.; Wang, C.; Meng, Z.; Chen, J.; Guo, S.; Qin, W. Operation quality measurement method for tilling depth of suspended subsoiler. Trans. Chin. Soc. Agric. Mach. 2018, 49, 68–74. [Google Scholar]
- Ma, Y. Research on Heavy Tractor Tillage Control Technology Based on Variable Universe Fuzzy PID; Shandong University of Science and Technology: Qingdao, China, 2019. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NB | NM | NS | Z | PS | PM | PB | |
|---|---|---|---|---|---|---|---|
| NB | PB | PB | PM | PM | PS | PS | Z |
| NM | PS | NS | NB | NM | NM | NS | Z |
| NS | PM | PS | PM | PS | Z | NS | NM |
| Z | PS | PS | PS | Z | NS | NM | NM |
| PS | PS | PS | Z | NS | NM | NM | NB |
| PM | PS | Z | NS | NM | NM | NM | NB |
| PB | Z | NS | NS | NM | NM | NB | NB |
| NB | NM | NS | Z | PS | PM | PB | |
|---|---|---|---|---|---|---|---|
| NB | PB PS NB | PB NS NB | PM NB NM | PS NB NM | PS NB NS | Z NM Z | Z PS Z |
| NM | PB PS NB | PB NS NB | PM NB NM | PS NM NS | PS NM NS | Z NS Z | NS Z Z |
| NS | PM Z NB | PM NS NM | PM NM NS | PS NM NS | Z NS Z | NS NS PS | NS Z PS |
| Z | PM Z NM | PM NS NM | PS NS NS | Z NS Z | NS NS PS | NS NS PM | NM Z PM |
| PS | PS PB NM | PS NS NS | Z PS Z | NS PS PS | NS PS PS | NM PS PM | NM PB PB |
| PM | PS PB Z | Z NS Z | NS PS NS | NM PS PS | NM PS PM | NM PS PB | NB PB PB |
| PB | Z PB Z | Z PM Z | NM PM PS | NM PM PM | NM PS PM | NB PS PB | NB PB PB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Li, R.; Li, Y.; Zhang, Y.; Sun, H.; Ding, X.; Ma, Y. Research on Variable-Universe Fuzzy Control Technology of an Electro-Hydraulic Hitch System. Processes 2021, 9, 1920. https://doi.org/10.3390/pr9111920
Xu J, Li R, Li Y, Zhang Y, Sun H, Ding X, Ma Y. Research on Variable-Universe Fuzzy Control Technology of an Electro-Hydraulic Hitch System. Processes. 2021; 9(11):1920. https://doi.org/10.3390/pr9111920
Chicago/Turabian StyleXu, Jikang, Ruichuan Li, Yanchao Li, Yisheng Zhang, Huilai Sun, Xinkai Ding, and Yong Ma. 2021. "Research on Variable-Universe Fuzzy Control Technology of an Electro-Hydraulic Hitch System" Processes 9, no. 11: 1920. https://doi.org/10.3390/pr9111920
APA StyleXu, J., Li, R., Li, Y., Zhang, Y., Sun, H., Ding, X., & Ma, Y. (2021). Research on Variable-Universe Fuzzy Control Technology of an Electro-Hydraulic Hitch System. Processes, 9(11), 1920. https://doi.org/10.3390/pr9111920