The Potential of Fractional Order Distributed MPC Applied to Steam/Water Loop in Large Scale Ships




Abstract
1. Introduction
- the steam/water loop is a system of nonlinearity, strong interactions and multivariable;
- load and disturbances change frequently with large amplitude;
- operating conditions changes frequently (there are ten levels of the sea state);
- demands for mobility and rapidity are growing high.
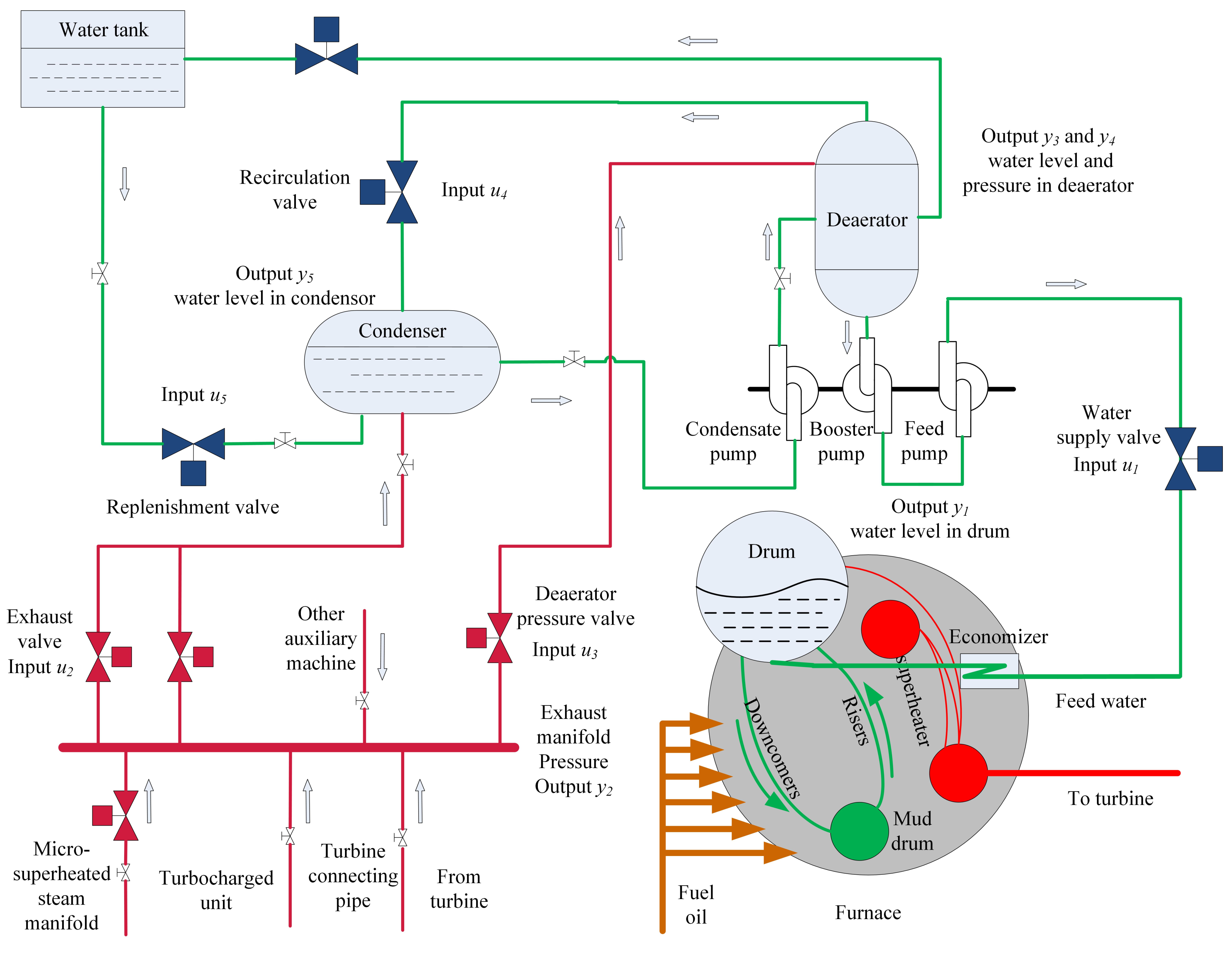
2. The Description for Steam/Water Loop
3. Fractional Order MPC with EPSAC Framework
3.1. Brief Introduction for EPSAC
3.2. Applied the EPSAC to the MIMO System with Distributed Scheme
| Algorithm 1: The iterative DiMPC |
|
4. Results and Discussion
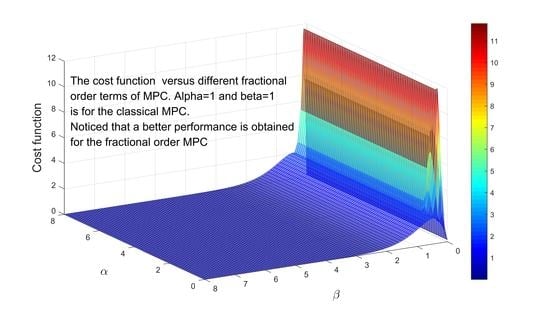
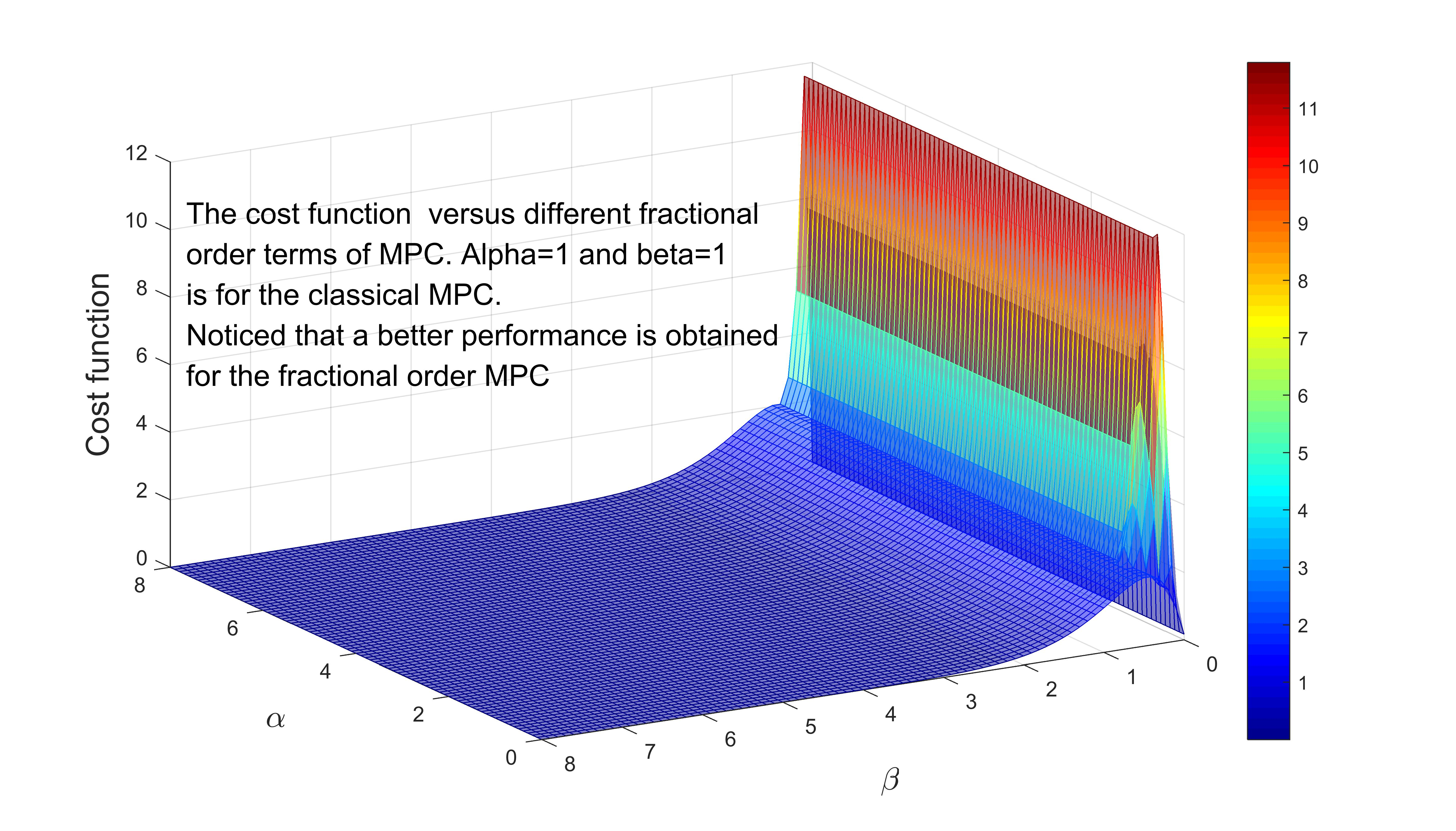
4.1. The Effect of Different Fractional Orders on the Overall System Performance
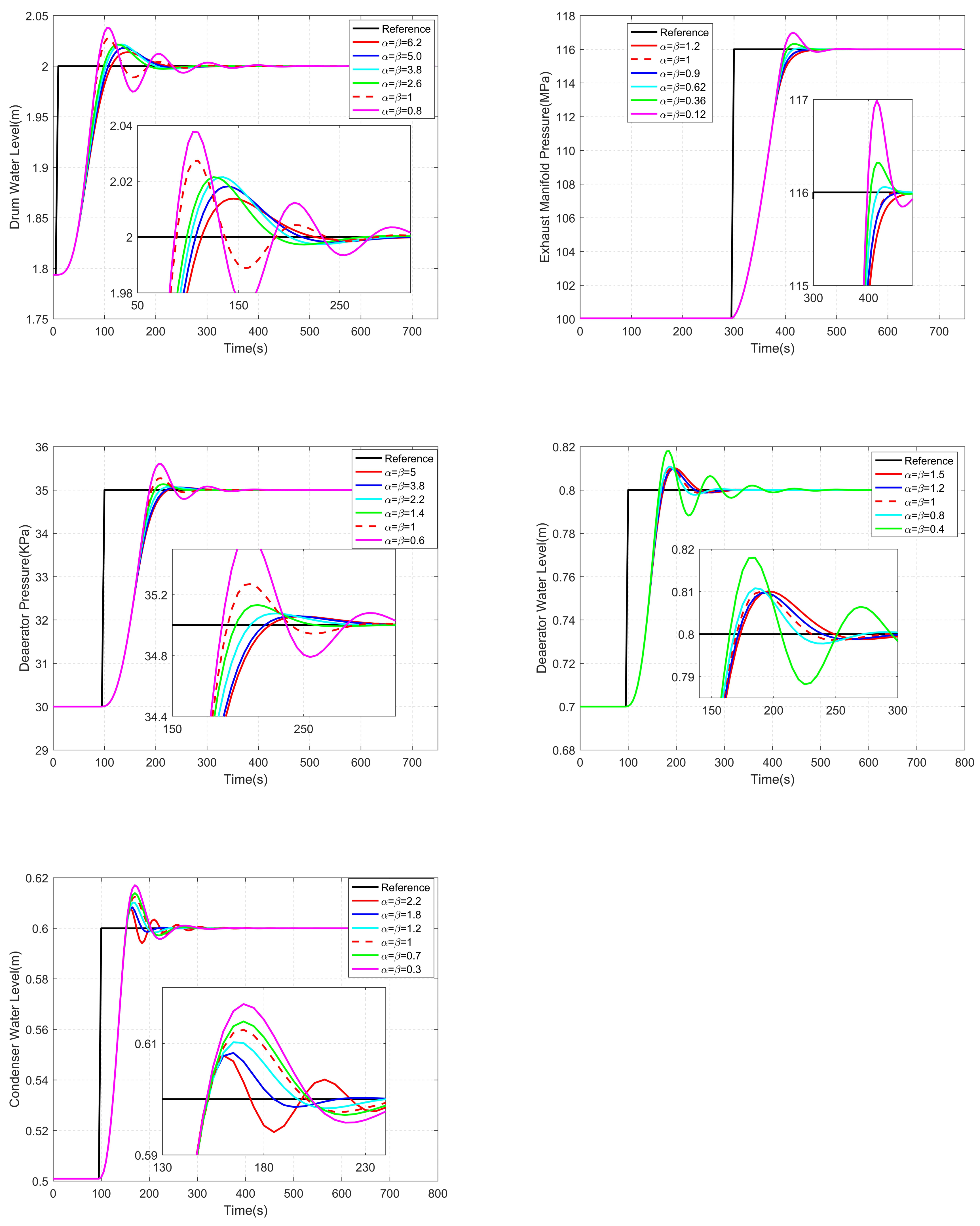
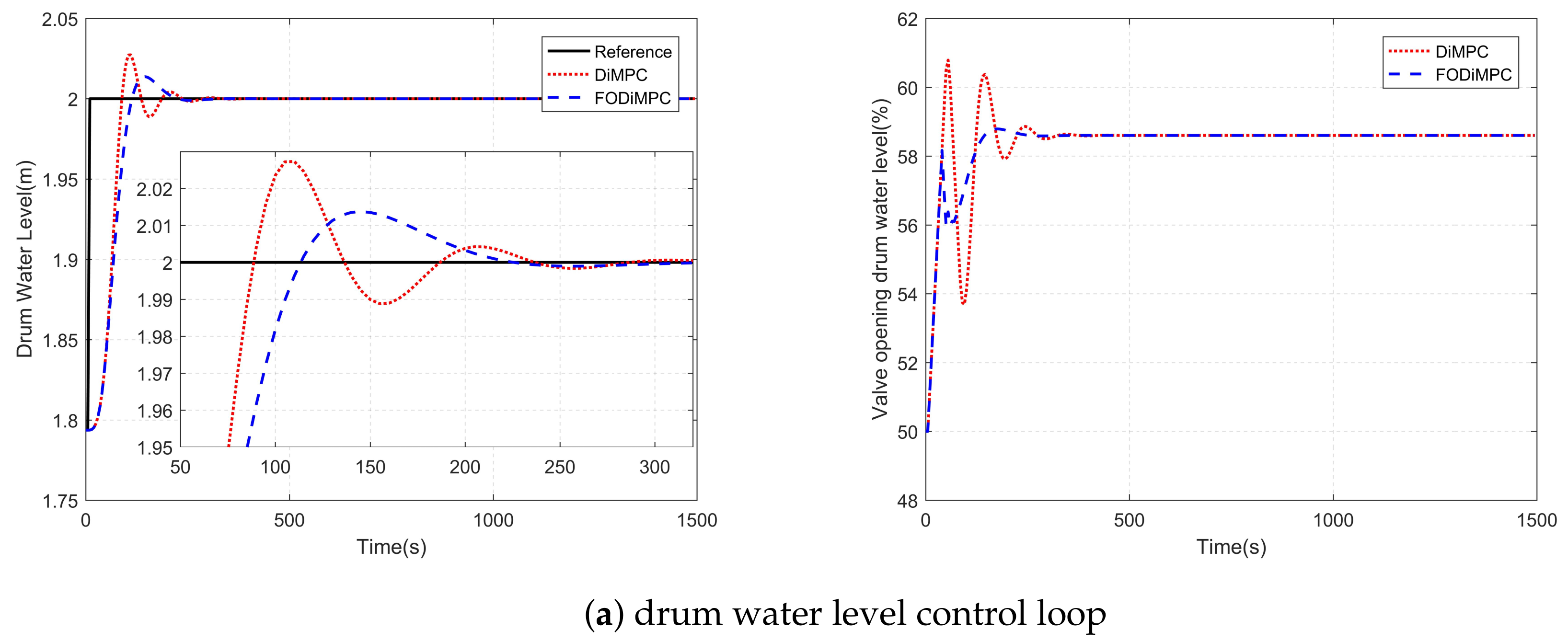
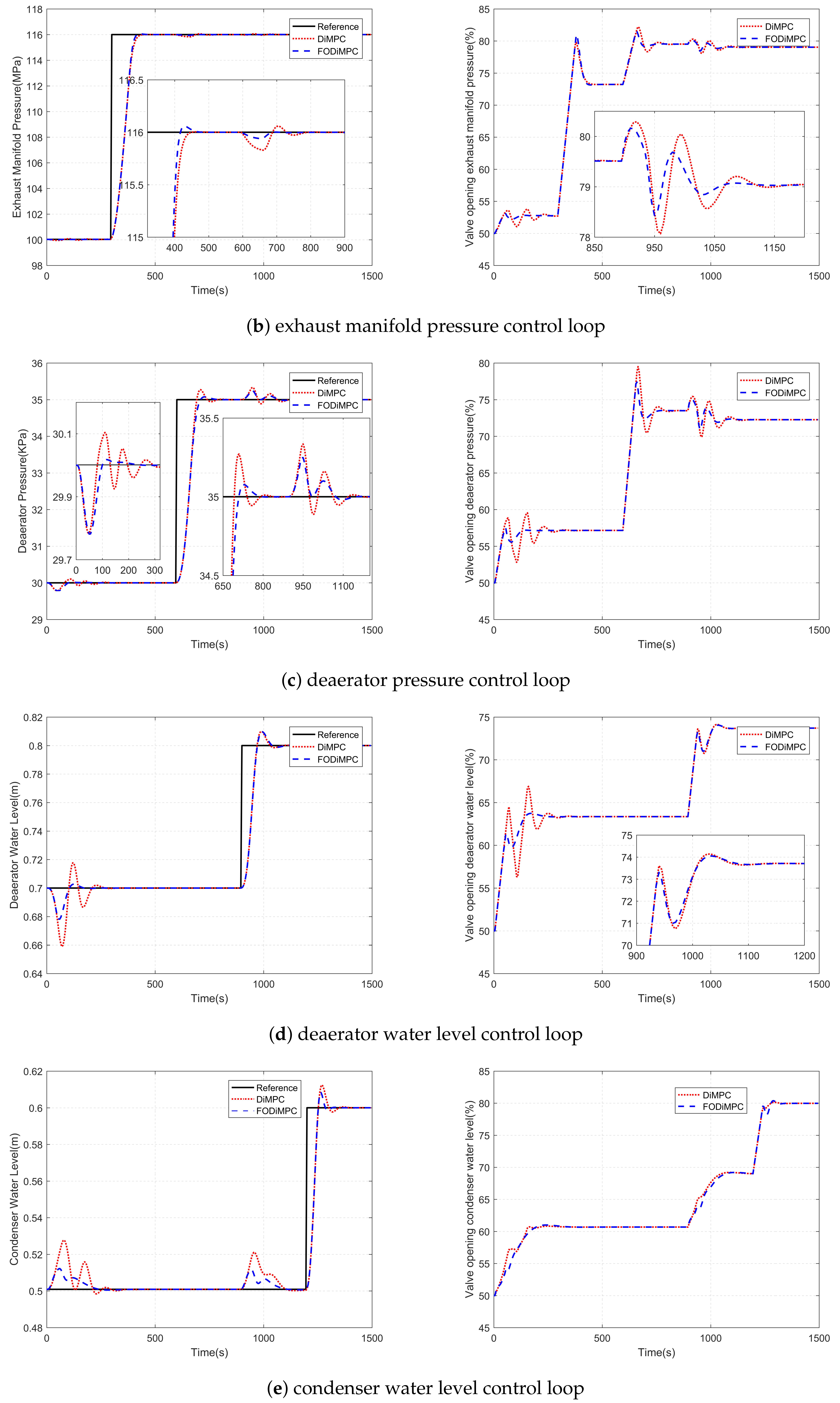
4.2. Reference Tracking Performance
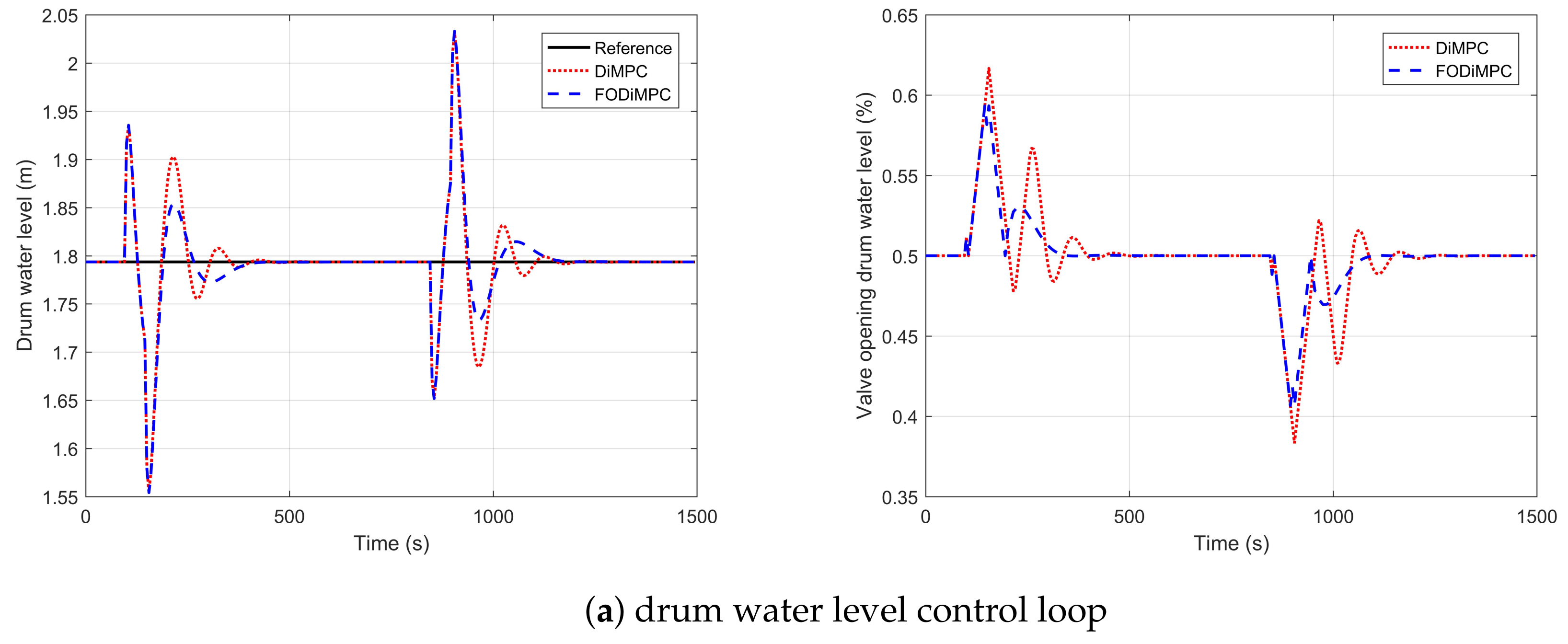
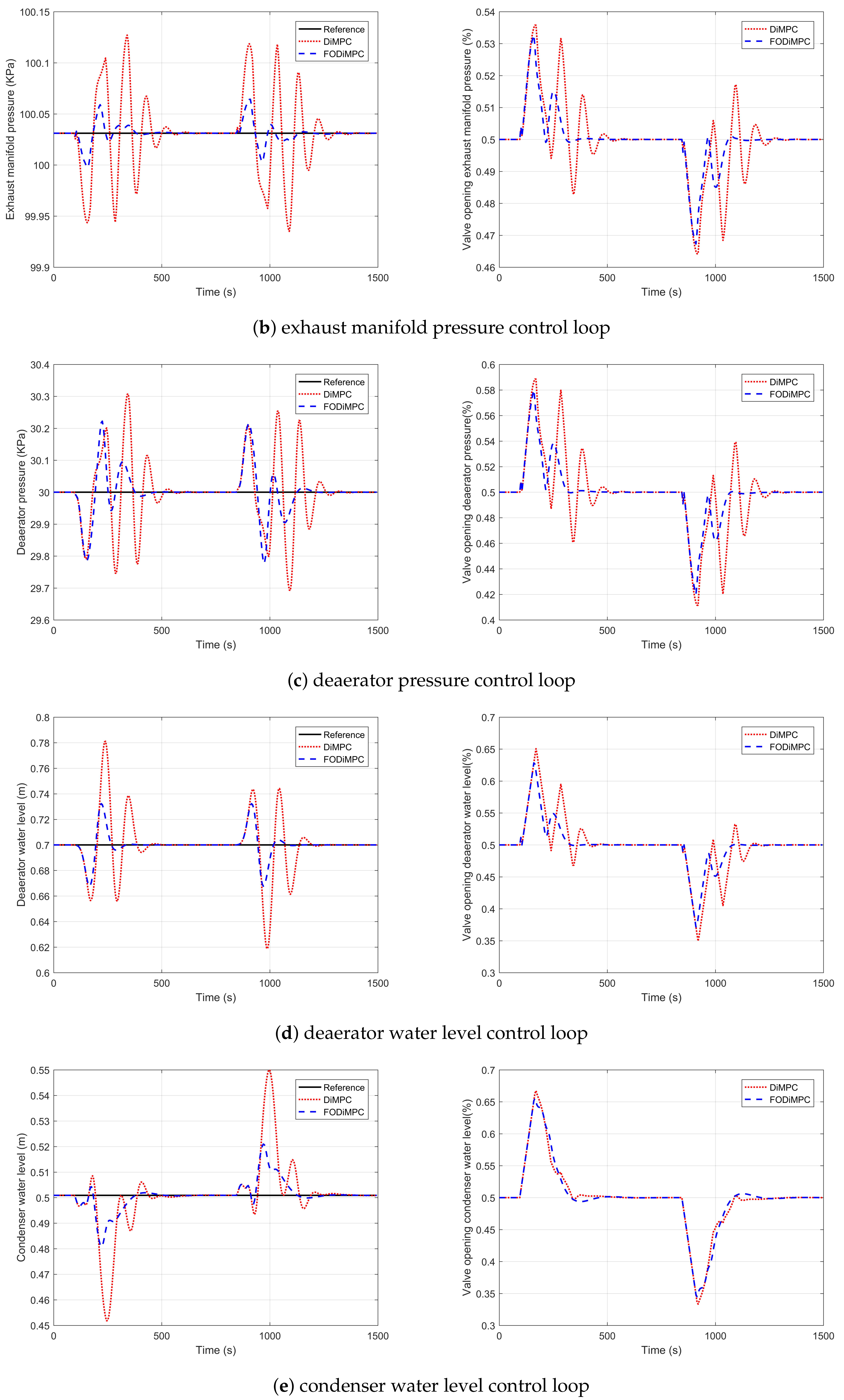
4.3. Load Disturbance Rejection Performance
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lamnabhi-Lagarrigue, F.; Annaswamy, A.; Engell, S.; Isaksson, A.; Khargonekar, P.; Murray, R.M.; Nijmeijer, H.; Samad, T.; Tilbury, D.; Van den Hof, P. Systems & Control for the future of humanity, research agenda: Current and future roles, impact and grand challenges. Annu. Rev. Control 2017, 43, 1–64. [Google Scholar]
- Drbal, L.; Westra, K.; Boston, P. Power Plant Engineering; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Zhao, S.; Maxim, A.; Liu, S.; De Keyser, R.; Ionescu, C.M. Distributed model predictive control of steam/water loop in large scale ships. Processes 2019, 7, 442. [Google Scholar] [CrossRef]
- Romero, M.; Mañoso, C.; Ángel, P.; Vinagre, B.M. Fractional-order generalized predictive control: Formulation and some properties. In Proceedings of the 2010 11th International Conference on Control Automation Robotics & Vision, Singapore, 7–10 December 2010; pp. 1495–1500. [Google Scholar]
- Samad, T. A survey on industry impact and challenges thereof [technical activities]. IEEE Control Syst. Mag. 2017, 37, 17–18. [Google Scholar]
- Liu, X.; Cui, J. Economic model predictive control of boiler-turbine system. J. Process Control 2018, 66, 59–67. [Google Scholar] [CrossRef]
- Zhang, F.; Wu, X.; Shen, J. Extended state observer based fuzzy model predictive control for ultra-supercritical boiler-turbine unit. Appl. Therm. Eng. 2017, 118, 90–100. [Google Scholar] [CrossRef]
- Ławryńczuk, M. Nonlinear predictive control of a boiler-turbine unit: A state-space approach with successive on-line model linearisation and quadratic optimisation. ISA Trans. 2017, 67, 476–495. [Google Scholar] [CrossRef]
- Ionescu, C.M.; Copot, D. Hands-on MPC tuning for industrial applications. Bull. Pol. Acad. Sci.-Tech. Sci. 2019, 67, 925–945. [Google Scholar]
- Maxim, A.; Copot, D.; Copot, C.; Ionescu, C.M. The 5W’s for Control as Part of Industry 4.0: Why, What, Where, Who, and When—A PID and MPC Control Perspective. Inventions 2019, 4, 10. [Google Scholar] [CrossRef]
- De Keyser, R.; Muresan, C.I.; Ionescu, C.M. An efficient algorithm for low-order direct discrete-time implementation of fractional order transfer functions. ISA Trans. 2018, 74, 229–238. [Google Scholar] [CrossRef]
- Sabatier, J.; Agrawal, O.P.; Machado, J.T. Advances in Fractional Calculus; Springer: Berlin/Heidelberg, Germany, 2007; Volume 4. [Google Scholar]
- Podlubny, I. Fractional differential equations. Math. Sci. Eng. 1999, 198, 244–252. [Google Scholar]
- De Keyser, R.; Muresan, C.I.; Ionescu, C.M. Universal direct tuner for loop control in industry. IEEE Access 2019, 7, 81308–81320. [Google Scholar] [CrossRef]
- Cajo Diaz, R.A.; Copot, C.; Ionescu, C.M.; De Keyser, R.; Plaza Guingla, D.A. Fractional order PD path-following control of an AR.Drone quadrotor. In Proceedings of the 2018 IEEE 12th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 17–19 May 2018; pp. 291–296. [Google Scholar]
- Saleem, A.; Soliman, H.; Al-Ratrout, S.; Mesbah, M. Design of a fractional order PID controller with application to an induction motor drive. Turk. J. Electr. Eng. Comput. Sci. 2018, 26, 2768–2778. [Google Scholar] [CrossRef]
- Mohammadikia, R.; Aliasghary, M. A fractional order fuzzy PID for load frequency control of four-area interconnected power system using biogeography-based optimization. Int. Trans. Electr. Energy Syst. 2019, 29, e2735. [Google Scholar] [CrossRef]
- Cajo, R.; Muresan, C.I.; Ionescu, C.M.; De Keyser, R.; Plaza, D. Multivariable fractional order PI autotuning method for heterogeneous dynamic systems. IFAC-PapersOnLine 2018, 51, 865–870. [Google Scholar] [CrossRef]
- Zeng, G.Q.; Chen, J.; Dai, Y.X.; Li, L.M.; Zheng, C.W.; Chen, M.R. Design of fractional order PID controller for automatic regulator voltage system based on multi-objective extremal optimization. Neurocomputing 2015, 160, 173–184. [Google Scholar] [CrossRef]
- Cajo Diaz, R.A.; Mac Thi, T.; Copot, C.; Plaza Guingla, D.A.; De Keyser, R.; Ionescu, C.M. Multiple UAVs formation for emergency equipment and medicines delivery based on optimal fractional order controllers. In Proceedings of the Preprints of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 328–333. [Google Scholar]
- Cajo, R.; Mac, T.T.; Plaza, D.; Copot, C.; De Keyser, R.; Ionescu, C. A survey on fractional order control techniques for unmanned aerial and ground vehicles. IEEE Access 2019, 7, 66864–66878. [Google Scholar] [CrossRef]
- Muresan, C.; Birs, I.R.; Folea, S.; Ionescu, C.M. Fractional order based velocity control system for a nanorobot in non-Newtonian fluids. Bull. Pol. Acad. Sci.-Tech. Sci. 2018, 66. [Google Scholar] [CrossRef]
- Zhang, R.; Zou, Q.; Cao, Z.; Gao, F. Design of fractional order modeling based extended non-minimal state space MPC for temperature in an industrial electric heating furnace. J. Process Control 2017, 56, 13–22. [Google Scholar] [CrossRef]
- Chen, M.R.; Zeng, G.Q.; Dai, Y.X.; Lu, K.D.; Bi, D.Q. Fractional-Order model predictive frequency control of an islanded microgrid. Energies 2019, 12, 84. [Google Scholar] [CrossRef]
- Zhao, S.; Maxim, A.; Liu, S.; De Keyser, R.; Ionescu, C. Effect of control horizon in model predictive control for steam/water loop in large-scale ships. Processes 2018, 6, 265. [Google Scholar] [CrossRef]
- De Keyser, R. Model based predictive control for linear systems. In UNESCO Encyclopaedia of Life Support Systems, Robotics and Automation, Vol XI, Article Contribution 6.43.16.1; Eolss Publishers Co Ltd.: Oxford, UK, 2003. [Google Scholar]
- Romero, M.; de Madrid, A.P.; Vinagre, B.M. Arbitrary real-order cost functions for signals and systems. Signal Process. 2011, 91, 372–378. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Outputs | Operating Points | Range | Units |
|---|---|---|---|
| Water level in drum | 1.79 | [1.39–2.19] | m |
| Pressure in exhaust manifold | 100.03 | [87.03–133.8] | MPa |
| Pressure in deaerator | 30 | [24.9–43.86] | KPa |
| Water level in deaerator | 0.7 | [0.49–0.89] | m |
| Water level in condenser | 0.5 | [0.32–0.63] | m |
| Parameters | |||||
|---|---|---|---|---|---|
| Values | , , , , samples | , , , , samples | 1 | 300 |
| Loops | Fractional Orders |
|---|---|
| Drum water level control loop | [6.2 5.0 3.8 2.6 1.0 0.8] |
| Exhaust manifold pressure control loop | [1.2 1.0 0.9 0.62 0.36 0.12] |
| Deaerator pressure control loop | [5.0 3.8 2.2 1.4 1.0 0.6] |
| Deaerator water level control loop | [1.5 1.2 1.0 0.8 0.4] |
| Condenser water level control loop | [2.2 1.8 1.2 1.0 0.7 0.3] |
| Time (s) | 2–300 | 300–600 | 600–900 | 900–1200 | 1200–1500 |
|---|---|---|---|---|---|
| Drum Water Level (m) | 2 | 2 | 2 | 2 | 2 |
| Exhaust Manifold Pressure(MPa) | 100.03 | 116 | 116 | 116 | 116 |
| Deaerator Pressure (KPa) | 30 | 30 | 35 | 35 | 35 |
| Deaerator Water Level(m) | 0.7 | 0.7 | 0.7 | 0.8 | 0.8 |
| Condenser Water Level(m) | 0.5 | 0.5 | 0.5 | 0.5 | 0.6 |
| Index | Loop 1 | Loop 2 | Loop 3 | loop 4 | Loop 5 | |
|---|---|---|---|---|---|---|
| MPC | 1.2614 | 1.6972 | 1.9464 | 2.0500 | 2.9060 | |
| FOMPC | 1.3337 | 1.6411 | 1.8813 | 1.5570 | 1.9686 | |
| MPC | 0.0302 | 0.4776 | 0.1330 | 0.1577 | 1.6925 | |
| FOMPC | 0.0205 | 0.4719 | 0.1014 | 0.1371 | 1.7689 |
| Index | Loop 1 | Loop 2 | Loop 3 | Loop 4 | Loop 5 |
|---|---|---|---|---|---|
| 0.9458 | 1.0342 | 1.0346 | 1.3166 | 1.4762 | |
| 1.4729 | 1.0119 | 1.3119 | 1.1503 | 0.9568 |
| Index | Loop 1 | Loop 2 | Loop 3 | Loop 4 | Loop 5 | |
|---|---|---|---|---|---|---|
| MPC | 3.5312 | 0.0686 | 0.6469 | 4.8710 | 3.4694 | |
| FOMPC | 3.1523 | 0.0129 | 0.3402 | 1.6632 | 1.6197 | |
| MPC | 0.2403 | 0.0393 | 0.2379 | 0.5215 | 0.7876 | |
| FOMPC | 0.1452 | 0.0206 | 0.1253 | 0.3114 | 0.7855 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, S.; Cajo, R.; De Keyser, R.; Ionescu, C.-M. The Potential of Fractional Order Distributed MPC Applied to Steam/Water Loop in Large Scale Ships. Processes 2020, 8, 451. https://doi.org/10.3390/pr8040451
Zhao S, Cajo R, De Keyser R, Ionescu C-M. The Potential of Fractional Order Distributed MPC Applied to Steam/Water Loop in Large Scale Ships. Processes. 2020; 8(4):451. https://doi.org/10.3390/pr8040451
Chicago/Turabian StyleZhao, Shiquan, Ricardo Cajo, Robain De Keyser, and Clara-Mihaela Ionescu. 2020. "The Potential of Fractional Order Distributed MPC Applied to Steam/Water Loop in Large Scale Ships" Processes 8, no. 4: 451. https://doi.org/10.3390/pr8040451
APA StyleZhao, S., Cajo, R., De Keyser, R., & Ionescu, C.-M. (2020). The Potential of Fractional Order Distributed MPC Applied to Steam/Water Loop in Large Scale Ships. Processes, 8(4), 451. https://doi.org/10.3390/pr8040451